A Directed Spanning Tree Adaptive Control Framework for Time-Varying Formations ††thanks: The revised version of this work has been accepted by IEEE Transactions on Control of Network Systems, doi: 10.1109/TCNS.2021.3050332.
Abstract
In this paper, the time-varying formation and time-varying formation tracking problems are solved for linear multi-agent systems over digraphs without the knowledge of the eigenvalues of the Laplacian matrix associated to the digraph. The solution to these problems relies on a framework that generalizes the directed spanning tree adaptive method, which was originally limited to consensus problems. Necessary and sufficient conditions for the existence of solutions to the formation problems are derived. Asymptotic convergence of the formation errors is proved via graph theory and Lyapunov analysis.
Index Terms:
Adaptive control, directed graphs, multi-agent systems, formation control.I Introduction
Formation control of multi-agent systems has captured increasing attention due to applications in spacecraft formation flying, search and rescue operations, intelligent transport system, to name a few [1, 2]. By designing appropriate feasibility conditions, results on time-varying formation (TVF) [3, 4, 5], and time-varying formation tracking (TVFT) [6, 7, 8] have extended the time-invariant formation case. These designs rely on consensus-based methodologies [9, 10, 11, 12] to accomplish the formation in a distributed way (i.e. using local information only). However, a common notable problem in such methods is the required knowledge of the smallest nonzero eigenvalue of the communication Laplacian matrix, which might be unknown in large networks.
It is known that by suitably designing time-varying coupling weights in the network, the knowledge of the Laplacian eigenvalues can be overcome: this was shown for consensus [13, 14, 15], containment [16], or TVF [17, 18, 19] problems over undirected or detail-balanced/strongly-connected digraphs. For more general digraphs, the analysis is challenging due to the complexity of the Laplacian. To address this complexity, a distributed adaptive control method has recently been studied for synchronization/consensus problems in [20, 21, 22]: this method exploits the presence of a directed spanning tree (DST) in the network. However, a unifying DST-based adaptive control framework encompassing TVF and TVFT problems is not available. Most notably, it is unclear how to design appropriate feasibility conditions for time-varying formations in the DST framework. These observations motivate this study.
The main contribution of this paper is a unifying DST-based adaptive control framework addressing TVF and TVFT: not only does the proposed framework still avoid the knowledge of the Laplacian eigenvalues, but it also help to establish necessary and sufficient conditions for such time-varying formations from a different perspective. For TVF without leaders, a novel class of feasibility conditions is proposed, which is more efficient to check than the feasibility conditions in the state of the art. The proposed conditions generalize in a natural unified way in the presence of one or more leaders.
II Preliminaries and Problem Statement
II-A Notations
Let , , , represent the sets of real scalars, real positive scalars, -dimensional column vectors, matrices, respectively. Let and be the identity matrix, and the column vector with elements being one, respectively. Zero vectors and zero matrices are all denoted by . For a vector , let denote the Euclidean norm. For a real symmetric matrix , (resp. ) is its maximum (resp. minimum) eigenvalue, and (resp. ) means that is positive definite (resp. semi-definite). Denote as the set of natural numbers up to . Denote as the column vectorization. The abbreviation is the diagonalization operator and ’N-S’ is short for ’necessary and sufficient’. The cardinality of a set is denoted by and the difference (resp. union) of the sets and is denoted by (resp. ). Moreover, stands for the Kronecker product.
II-B Graph Theory
A weighted digraph is specified by the node set , the edge set and the weighted adjacency matrix . In the matrix , if , indicating that (resp. ) is an in-neighbor (resp. out-neighbor) of (resp. ), which can be denoted by (resp. ). Let be the out-degree of . Moreover, is the Laplacian matrix of , which is defined as: , if , and , . A path of from node to corresponds to an ordered sequence of edges . A digraph is weakly-connected if every pair of nodes are connected by a path disregarding the directions. A directed spanning tree (DST) of is a subgraph where there is a node called the root, that has no in-neighbors, such that one can find a path from the root to every other node. In a DST, if is an in-neighbor of , one can also say that is a parent node, and is a child node. Moreover, a node is called a stem if it has at least one child, and a leaf otherwise.
II-C Problem Statement
Let denote the digraph that characterizes the communication topology among agents, where the weights in represent the communication strengths. The dynamics of the agents are given by
| (1) |
where is the state of agent and is its control input to be designed. Let the pair be stabilizable.
Definition 1 (TVF)
The multi-agent system (1) is said to achieve the time-varying formation (TVF) defined by the time-varying vector if, for any initial states, there holds
| (2) |
Now consider the case where there are leader agents, , in the network . Without loss of generality, let the first agents be the leaders, and the rest be the followers:
| (3) |
As leaders have no in-neighbors, the Laplacian matrix of can be partitioned as
| (4) |
where and .
Definition 2 ([7])
A follower is called well-informed if all leaders are its in-neighbors, and is uninformed if no leader is its in-neighbor.
Definition 3 (TVFT)
III DST-Based Distributed Adaptive TVF
This section appropriately extends the DST-based adaptive control method to solve the TVF problem of Definition 1. The following is a standard connectivity assumption ([3, 5], etc).
Assumption 1
The digraph has at least one DST.
Under Assumption 1, one can select a DST of . Note that finding a DST can also be conducted in a distributed manner, but it requires the agents to exchange more information. As in [21], we assume that is known. Without loss of generality, let node be the root of the . Correspondingly, let be the Laplacian matrix of and be the set of out-neighbors of in .
Let denote the unique parent of node in for , then . For compactness, define as the formation state, i.e., the distance between the current state and the desired formation offset of agent . Denote , .
We propose the DST-based adaptive TVF controller as:
| (7) |
with the time-varying coupling weights
| (10) | ||||
| (11) |
In (7)-(III), , , , and are gains to be designed, and . In (7), is the coupling weight between agent and its in-neighbor , which is time-varying only if the corresponding edge appears in , i.e., and for some , and constant otherwise.
Remark 1
The structure of controller (7) is as follows. The gain is to be designed to make the time-varying formation feasible; the gain is needed to control the average formation signal ; the gain is a consensus gain. Different from the related literature [3, 5], the DST structure is explicitly used in the control law (7)-(III).
III-A Technical lemmas
Lemma 1 (N-S condition for TVF)
Proof:
Lemma 2 (Auxiliary matrix )
Proof:
Remark 2
Lemma 3 (Feasibility conditions)
Under Assumption 1, let us consider controller (7) with time-varying coupling weights (10) for any DST . Suppose that the origin of the linear time-varying system
is globally asymptotically stable, where with fixed defined as in Lemma 2, and
| (26) |
Then, the TVF problem can be solved by controller (7) if and only if
| (27) |
holds .
Proof:
Let be the error vector between the parent and the child nodes of the directed edge , , and denote . Then, . From Lemma 1, it remains to prove that under the given conditions.
Based on (1) and (7), the dynamics of is given by
| (28) |
where is the Laplacian matrix of at time due to the adaptive mechanisms. Then, it follows from (III-A) and the definitions of and that
| (29) |
where Lemma 2 is used to get the second equality. Given that the linear system (3) asymptotically converges to zero, one knows that if and only if
| (30) |
III-B Main result
The design process of the TVF controller is summarized in Algorithm 1, and analyzed in the following theorem.
-
1.
Find a constant such that the formation feasibility condition
(31) holds for any DST . If such exists, continue; else, the algorithm terminates without solutions;
-
2.
Choose such that is stabilizable (using, e.g., pole placement). For some , , solve the following LMI:
(32) to get a ;
-
3.
Set , and choose scalars .
Theorem 1 (Main result for TVF)
Proof:
The feasibility condition (1) guarantees that (3) holds . Moreover,
| (33) |
where is defined as in Lemma 3 based on . In the following, it will be proved that the designed controller guarantees . As such, the proof of the theorem will be complete according to Lemma 3.
Based on Lemma 2, one has
| (36) |
Define , and substitute designed in Algorithm 1 into (III-B). Then, one has
| (42) |
Now we show that by appropriately selecting , , it can be fulfilled that
| (48) |
is positive definite. To see this, let us denote and , where , . Clearly, by choosing . Now suppose , . Note that , . Then, one has . By choosing , one has according to the Schur complement [23, Chapter 2.1]. By mathematical induction, is positive definite.
Moreover, since is fixed, one can always choose sufficiently large , , such that where is defined in (2). Then, it follows from (III-B) and (2) that
| (49) |
which implies that the signals and in are bounded. Note that implies that , thus by LaSalle’s invariance principle, one has . This completes the proof. ∎
Remark 3
The LMI (2) is feasible for some if and only if is stabilizable, which can be realized since is stabilizable. Note that different formation vectors might lead to different solutions .
Remark 4
In state-of-the-art TVF, the number of feasibility conditions is of the order (i.e., one condition for each pair of connected agents) [5, 17]. The proposed number of feasibility conditions in (1) is , i.e., exploiting the DST structure leads to the minimum number of conditions: note that is the minimum number of edges such that is weakly-connected.
IV DST-Based Distributed Adaptive TVFT
In this section, we propose a novel generalized DST-based adaptive controller to solve the TVFT problem of Definition 3. We address the general case with multiple leaders, and give a corollary for the special case with a single leader.
Definition 4
The digraph is said to have a generalized DST rooting at the leadership, if the followers are either well-informed or uninformed, and for each uninformed follower, there exists at least one well-informed follower that has a directed path to it.
Assumption 2
The digraph has at least one generalized DST rooting at the leadership.
Remark 5
IV-A Auxiliary system, technical lemma and control law
Let us introduce an auxiliary multi-agent system with an induced communication graph . Define where the agent with index is the leader and is well-informed in . The adjacency matrix where if , and otherwise.
To clarify Assumption 2 and the induced graph , see Fig. 1. It is clear that the multiple leaders are merged as a single joint leader in .
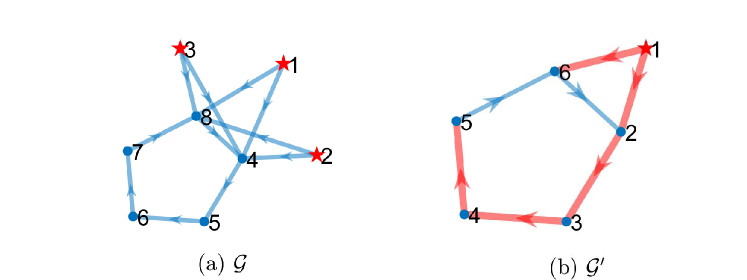
In the auxiliary multi-agent system, let and be the state and control input of agent . For the leader, define and . For the followers, define , , for . Let , . Then, the dynamics of satisfies
| (50) |
where , and the initial state values are determined by those of multi-agent system (II-C).
Lemma 4 (N-S condition for TVFT)
Proof:
According to the definitions of and , it is obvious that , , is equivalent to , . ∎
Under Assumption 2, there is at least one DST in rooting at the leader. Then, one can choose such a DST . Let denote the unique parent of node in for . Let be the set of in-neighbors of in and be the set of out-neighbors of in .
The generalized DST-based distributed adaptive TVFT controller for follower of (II-C), , is proposed as:
| (51) | ||||
| (52) | ||||
| (55) |
| (56) |
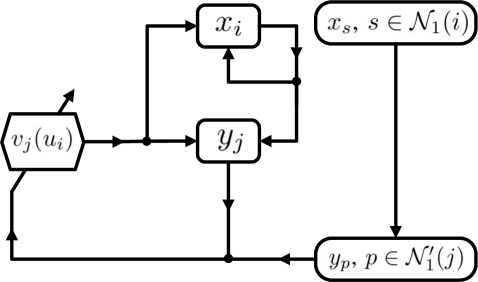
In order to illustrate the idea of the auxiliary multi-agent system, the information flow of the closed-loop system , , is sketched in Fig. 2. Instead of directly designing the controllers for multi-agent system (II-C), an auxiliary multi-agent system is defined as in (IV-A), and some interaction between them is constructed: at stage (52), each leader of (II-C) broadcast its -scaled state to the single leader of (IV-A), and each follower broadcast its state to the corresponding follower, respectively; at stage (51), each follower of (IV-A) responds to the corresponding follower of (II-C) with its control input. Then, the original TVFT problem in (II-C) is successfully transformed into the TVFT with a single leader in (IV-A). It should be pointed out that only the local information, i.e., the states of , , are included in the loop of from Fig. 2.
IV-B Main result
The design process of the TVFT controller is summarized in Algorithm 2, and analyzed in the following theorem.
-
1.
Find a constant such that the formation tracking feasibility condition
(57) holds . If such exists, continue; else, the algorithm terminates without solutions;
-
2.
Choose , , and solve the following LMI:
(58) to get a ;
-
3.
Set , and choose scalars .
Theorem 2 (Main result for TVFT)
Proof:
The condition that (57) holds is equivalent to , , which means that the TVFT defined by is feasible for the auxiliary multi-agent system (IV-A). According to Lemma 4, it remains to show that (52)-(IV-A) solves the TVFT for multi-agent system (IV-A) defined by with a single leader.
Extensions of Lemma 1 and Lemma 2 apply to and , and are not repeated for compactness. Let be the error vector between the parent and the child nodes of the directed edge , , and denote . Then . Let where and is defined as in Lemma 1 and 2, respectively, based on and
| (62) |
where the time-varying weights are defined in (52).
In the special case when , the auxiliary multi-agent system (IV-A) coincides with the original one, thus, it can be removed. The DST-based adaptive TVFT controller can be directly designed for follower , , as:
| (67) | ||||
| (70) |
and adaptive laws as in (III). Here, . Immediately, we have the following corollary.
Corollary 1 (Single leader case)
Remark 6
Remark 7
The TVFT problem with a single leader can be seen as a special type of the TVF problem where for the leader. By comparing (7) with (67), it can be seen that in (67). This means that there is no separate term for the average formation signal, since the formation reference is known a prior as the of leader’s trajectory.
V Numerical examples
In this section, three numerical examples for TVF, TVFT with three leaders and with a single leader are implemented to validate the theoretical results. In all three examples, the initial positions of the agents (followers) are chosen from a Gaussian distribution with standard deviation , and the initial coupling weights of the edges are chosen from a uniform distribution in the interval .
Example 1 (TVF)
Consider a second-order system modelled by (1) with ,
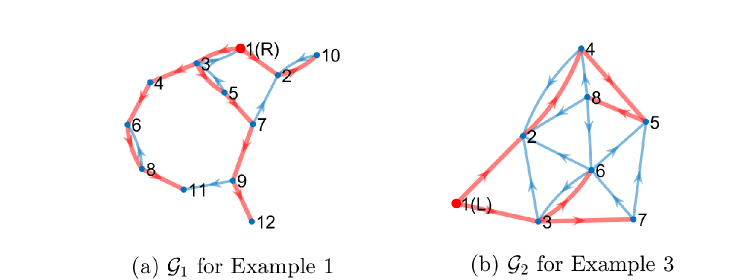
The agents interact on the digraph in Fig. 3. The required TVF is a pair of nested hexagons with for , and for .
Let . It can be verified via condition (1) that the desired formation is feasible for the selected DST. Since is stabilizable, we can assign . Let , , and solve LMI (2) to give a solution . Following Algorithm 1, one has , and . Let .
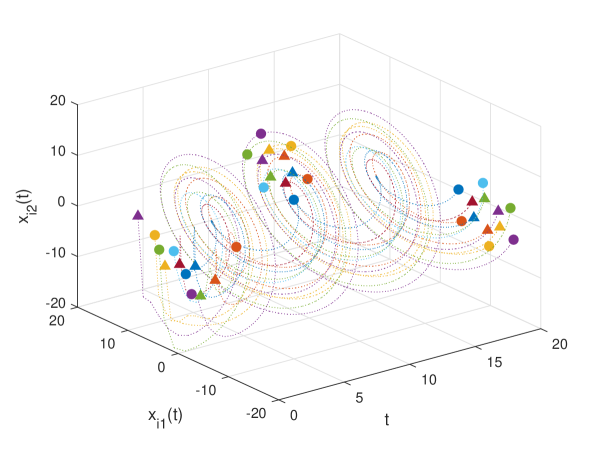
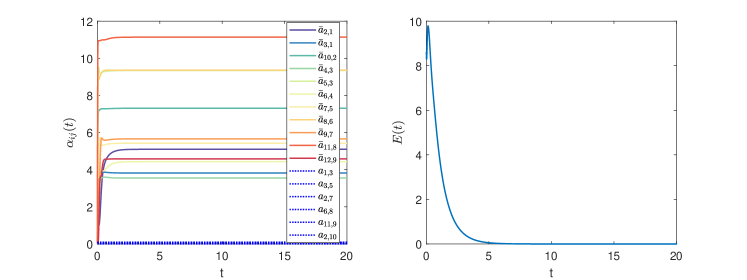
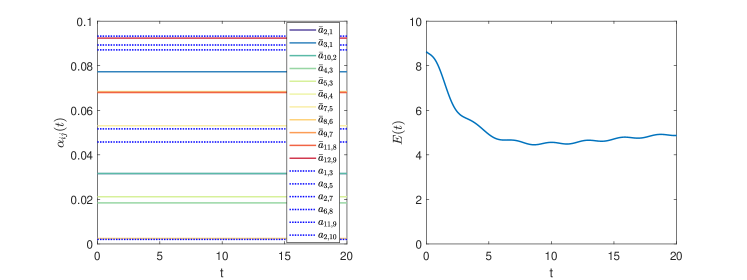
The trajectories of the agents are in Fig. 4, showing how the nested hexagons are formed and rotate. Let (see Remark 1), . The global formation error converges to zero, as shown in Fig. 5. Fig. 5 also shows that the weights are time-varying on the DST (solid lines) and kept constant otherwise (dashed lines). For comparison, Fig. 6 shows that if all weights are kept constant (), no TVF may be achieved (global formation error does not converge to zero).
Example 2 (TVFT with Three Leaders)
Consider a third-order multi-agent system modelled by (II-C) with , , and
The communication graph is the digraph in Fig. 1. The followers are required to form a time-varying pentagram described by
while tracking the average of the states of the leaders, i.e., .
Let . It can be verified that the defined is feasible. Let , , and . Following Algorithm 2, one has , and .
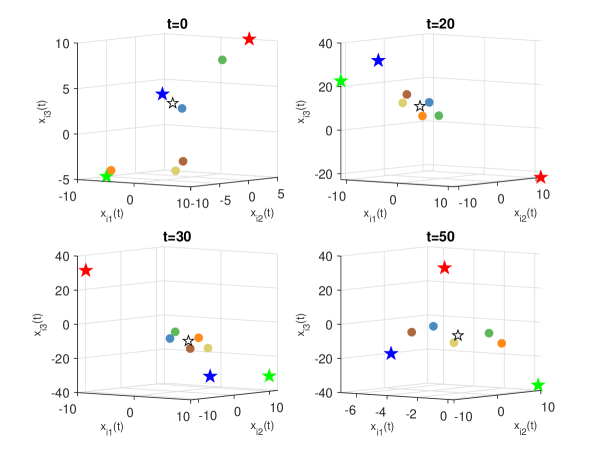
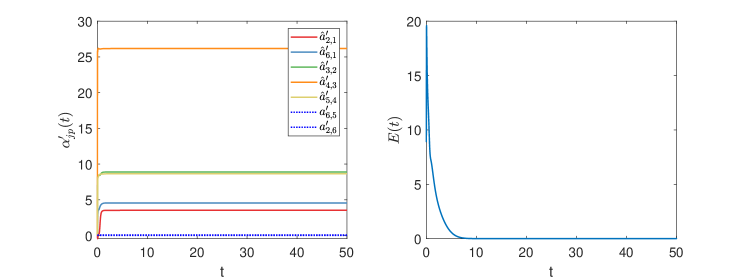
The initial value of the leaders are chosen as , , . Several snapshots of the agents are in Fig. 7, showing that the pentagram emerges and rotates around the average of the three leaders. Similarly, we define the global formation tracking error . The trajectories of in (see Fig. 1) and are provided in Fig. 8. Once more, a constant coupling strategy fails to accomplish the TVFT task, as shown in Fig. 9.
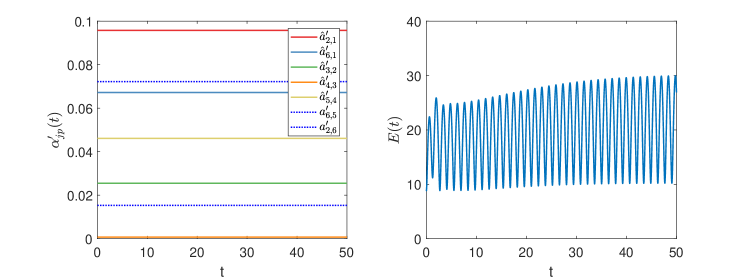
Example 3 (TVFT with a Single Leader)
Consider a network of second-order agents with , , and digraph in Fig. 3.
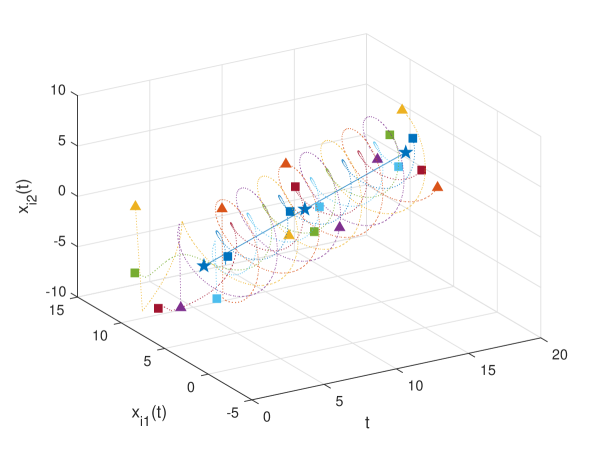
The desired formation is an equilateral triangle-like formation around the leader, which is specified by for , and for .
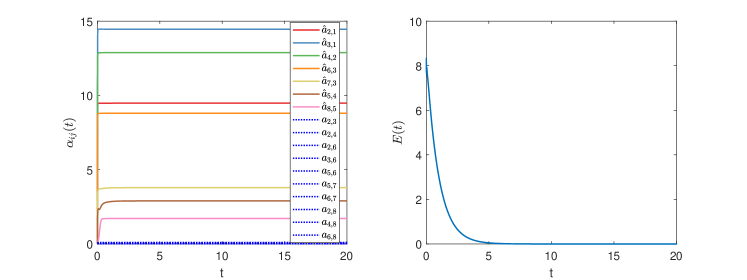
Let . It can be verified via condition (57) that the desired formation is feasible. Let , , and solve the LMI (58) to give a solution . Following Algorithm 2, one has , and . We choose .
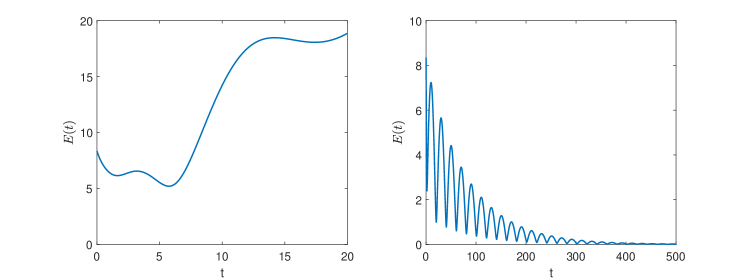
The initial value of the leader is chosen as . The trajectories of the agents are in Fig. 10, showing how the triangle emerges and rotates around the leader. If we define the global formation tracking error as , we can see from Fig. 11 that it converges to zero (see also the time-varying weights on the DST). Fig. 12 (left) shows that also in this case the TVFT may not be achieved with nonadaptive control.
The DST framework is not the only possible framework to remove the knowledge of the Laplacian eigenvalues: alternative frameworks have been proposed for consensus [25] and group TVFT [24]. Let us include a comparison with the adaptive method used in [25, 24], which can be written as:
| (71) |
Note that in (3) all coupling weights in the network are made adaptive. We select the same initial conditions, and ; the global formation tracking error is shown in Fig. 12 (right). As compared to Fig. 11 (right), it is interesting to note that adapting the gains on a DST instead of on the entire network leads to faster convergence of the formation errors.
VI Conclusions
A directed spanning tree (DST) adaptive framework has been developed for time-varying formation and formation tracking of linear multi-agent systems. The proposed framework provides a natural generalization of the DST based adaptive method in the presence of one or more leaders: necessary and sufficient conditions for solving the proposed framework have been derived. Future topics may include generalizing the proposed DST framework in the sense of cluster formation, partial state information, nonlinear agents and nonzero inputs of the leaders.
[Proof of Lemma 2] Inspired by [20] and [21], an auxiliary matrix is introduced to analyze Lemma 2. Define as
| (74) |
where represents the vertex set of the subtree of rooting at node . The proof will proceed along three steps:
-
1.
Proving that ;
-
2.
Proving that ;
- 3.
Step 1) Let us denote . Then, , . We classify the discussions according to the value of in order to clarify the matrix .
Case 1: . Then, .
Since , , then , which is the out-degree of the root in ; When , there exists a unique satisfying , such that , implying that . Thus, .
To sum up,
Case 2: is a stem. Then, .
-
i.
When , . Then, satisfying , . Thus, .
-
ii.
When , . If , then satisfying , . Thus . If , there exists a unique satisfying , such that , implying that . Then, .
To sum up, when is a stem.
Case 3: is a leaf. Then, .
In this case, , meaning that if and only if . Then
Summarizing all three cases, the matrix can be written in a unified way as Then,
So, is proved.
Step 2) Let us denote . Then,
where the definitions of and are used to get the last two equalities, respectively. Since has zero row sums, we have
Then, is proved.
Step 3) Let both sides multiply , one has , then (17) holds. To prove the explicit form of in (21), one can can distinguish three cases based on the relationships between the edge and the subtree :
Case 1: . Then, it is obvious that .
Case 2: and . In this case, the only possible value of is . Then,
Case 3: . Then,
-
i.
When ,
-
ii.
When ,
Summarizing all three cases, the matrix can also be given in a unified way as Then (21) is proved, which completes the proof.
References
- [1] K.-K. Oh, M.-C. Park, and H.-S. Ahn, “A survey of multi-agent formation control,” Automatica, vol. 53, pp. 424–440, 2015.
- [2] J. Hu, P. Bhowmick, F. Arvin, A. Lanzon, and B. Lennox, “Cooperative control of heterogeneous connected vehicle platoons: An adaptive leader-following approach,” IEEE Robot. Autom. Lett., vol. 5, no. 2, pp. 976–983, 2020.
- [3] Y. Liu and Y. Jia, “An iterative learning approach to formation control of multi-agent systems,” Syst. Control Lett., vol. 61, no. 1, pp. 148–154, 2012.
- [4] L. Brinón-Arranz, A. Seuret, and C. Canudas-de Wit, “Cooperative control design for time-varying formations of multi-agent systems,” IEEE Trans. Autom. Control, vol. 59, no. 8, pp. 2283–2288, 2014.
- [5] X. Dong, J. Xi, G. Lu, and Y. Zhong, “Formation control for high-order linear time-invariant multiagent systems with time delays,” IEEE Trans. Control Netw. Syst., vol. 1, no. 3, pp. 232–240, 2014.
- [6] X. Dong, Y. Li, C. Lu, G. Hu, Q. Li, and Z. Ren, “Time-varying formation tracking for UAV swarm systems with switching directed topologies,” IEEE Trans. Neural Netw. Learn. Syst., vol. 30, no. 12, pp. 3674–3685, 2019.
- [7] X. Dong and G. Hu, “Time-varying formation tracking for linear multiagent systems with multiple leaders,” IEEE Trans. Autom. Control, vol. 62, no. 7, pp. 3658–3664, 2017.
- [8] J. Yu, X. Dong, Q. Li, and Z. Ren, “Practical time-varying formation tracking for second-order nonlinear multiagent systems with multiple leaders using adaptive neural networks,” IEEE Trans. Neural Netw. Learn. Syst., vol. 29, no. 12, pp. 6015–6025, 2018.
- [9] W. Ren, “Consensus based formation control strategies for multi-vehicle systems,” in Proc. Amer. Control Conf. IEEE, 2006, pp. 4237–4242.
- [10] F. Xiao, L. Wang, J. Chen, and Y. Gao, “Finite-time formation control for multi-agent systems,” Automatica, vol. 45, no. 11, pp. 2605–2611, 2009.
- [11] W. Yu, W. X. Zheng, G. Chen, W. Ren, and J. Cao, “Second-order consensus in multi-agent dynamical systems with sampled position data,” Automatica, vol. 47, no. 7, pp. 1496–1503, 2011.
- [12] S. Baldi, S. Yuan, and P. Frasca, “Output synchronization of unknown heterogeneous agents via distributed model reference adaptation,” IEEE Trans. Control Netw. Syst., vol. 6, no. 2, pp. 515–525, 2018.
- [13] W. Yu, P. DeLellis, G. Chen, M. Di Bernardo, and J. Kurths, “Distributed adaptive control of synchronization in complex networks,” IEEE Trans. Autom. Control, vol. 57, no. 8, pp. 2153–2158, 2012.
- [14] Z. Li, W. Ren, X. Liu, and L. Xie, “Distributed consensus of linear multi-agent systems with adaptive dynamic protocols,” Automatica, vol. 49, no. 7, pp. 1986–1995, 2013.
- [15] B. Cheng and Z. Li, “Fully distributed event-triggered protocols for linear multi-agent networks,” IEEE Trans. Autom. Control, vol. 64, no. 4, pp. 1655–1662, 2019.
- [16] G. Wen, G. Hu, Z. Zuo, Y. Zhao, and J. Cao, “Robust containment of uncertain linear multi-agent systems under adaptive protocols,” Int. J. Robust Nonlinear Control, vol. 27, no. 12, pp. 2053–2069, 2017.
- [17] R. Wang, X. Dong, Q. Li, and Z. Ren, “Distributed adaptive control for time-varying formation of general linear multi-agent systems,” Int. J. Syst. Sci., vol. 48, no. 16, pp. 3491–3503, 2017.
- [18] ——, “Distributed time-varying output formation control for general linear multiagent systems with directed topology,” IEEE Trans. Control Netw. Syst., vol. 6, no. 2, pp. 609–620, 2018.
- [19] D. Yue, J. Cao, Q. Li, and M. Abdel-Aty, “Distributed neuro-adaptive formation control for uncertain multi-agent systems: node- and edge-based designs,” IEEE Trans. Netw. Sci. Eng., 2020.
- [20] W. Yu, J. Lu, X. Yu, and G. Chen, “Distributed adaptive control for synchronization in directed complex networks,” SIAM J. Control Optim., vol. 53, no. 5, pp. 2980–3005, 2015.
- [21] Z. Yu, D. Huang, H. Jiang, C. Hu, and W. Yu, “Distributed consensus for multiagent systems via directed spanning tree based adaptive control,” SIAM J. Control Optim., vol. 56, no. 3, pp. 2189–2217, 2018.
- [22] Z. Yu, H. Jiang, D. Huang, and C. Hu, “Directed spanning tree–based adaptive protocols for second-order consensus of multiagent systems,” Int. J. Robust Nonlinear Control, vol. 28, no. 6, pp. 2172–2190, 2018.
- [23] S. Boyd, L. El Ghaoui, E. Feron, and V. Balakrishnan, Linear Matrix Inequalities in System and Control Theory. SIAM, 1994, vol. 15.
- [24] J. Hu, P. Bhowmick, and A. Lanzon, “Distributed adaptive time-varying group formation tracking for multiagent systems with multiple leaders on directed graphs,” IEEE Trans. Control Netw. Syst., vol. 7, no. 1, pp. 140–150, 2020.
- [25] Y. Lv, Z. Li, Z. Duan, and G. Feng, “Novel distributed robust adaptive consensus protocols for linear multi-agent systems with directed graphs and external disturbances,” Int. J. Control, vol. 90, no. 2, pp. 137–147, 2017.