A revisit of the velocity averaging lemma: on the regularity of stationary Boltzmann equation in a bounded convex domain
Abstract.
In the present work, we adopt the idea of velocity averaging lemma to establish regularity for stationary linearized Boltzmann equations
in a bounded convex domain. Considering the incoming data, with three iterations, we establish regularity in fractional Sobolev space in space
variable up to order .
Boltzmann equation; regularity; averaging lemmas; fractional Sobolev spaces
1. Introduction
The celebrated velocity averaging lemma reveals that the combination of transport and averaging in velocity yields regularity in space variable [15, 16]. This is one of the key features that DiPerna and Lions used to attack the Cauchy problem for Boltzmann equations [12]. It is natural to adopt this technique to the study of regularity problem of linearized Boltzmann equation in the whole space [9]. In [16], in addition to the applications to the whole space domains, the authors also investigate the applications to bounded convex domains for transport equations. By adopting zero extension, they reduce the bounded domain case to the whole space case. In contrast with the whole space case in [9], which the regularity can be improved indefinitely by iterations, when applying the trick in [16] in a bounded domain, one can only proceed for one iteration. Notice that the main tool of velocity averaging lemma, namely, the method of Fourier transform, does not translate well on a bounded domain. In this article, we adopt Slobodeckij semi-norm as an alternative concept of Sobolev function class. This shifts the difficulty to singular integrals. To calculate these integrals, we encounter some estimates related to the geometry of the boundary. The way we do it is to properly compare convex domains with spherical domains in so that we can build up estimates for convex domains based on those for spherical domains. Another key feature to prove the boundedness of the singular integrals is the change of variables which will be addressed in Lemma 7.1 and Lemma 7.2. Considering the incoming data, with three iterations, we establish regularity in fractional Sobolev space in space variable up to order .
Recall the velocity averaging lemma in [10, 16]. Suppose is an solution to the transport equation
where Let
where is a bounded function with compact support. Then, we have
Here, the Sobolev space is generalized to non-integer order via the Fourier transform as follows.
Definition 1.1.
We say is in if
| (1.1) |
where is the Fourier transform of , i.e.,
The velocity averaging lemma demonstrates that the regularity in the transport direction can be converted to the regularity in space variable after averaging with weight .
First, we recapitulate the stationary linearized Boltzmann equation in the whole space,
| (1.2) |
where is the velocity distribution function and is the linearized collision operator. The linearized collision operator under consideration can be decomposed into a multiplicative operator and an integral operator.
| (1.3) |
where
Therefore, we can rewrite (1.3) as
| (1.4) |
Observing that the integral operator can serve as an agent of averaging, it is natural to imagine applying velocity averaging lemma to linearized Boltzmann equation. In case the source term is imposed, i.e.,
| (1.5) |
one can derive an integral equation
| (1.6) |
where
| (1.7) |
Performing the Picard iteration, formally we can derive that
| (1.8) |
By carefully adapting the idea of velocity averaging lemma, we find every two iterations improve regularity in space of order . More precisely, the following lemma was proved in [9].
Lemma 1.2.
The operator is bounded for any .
Here, the mixed fractional Sobolev space is defined as follows.
Definition 1.3.
We say is in if
| (1.9) |
where is the Fourier transform of with respect to space variable .
Motivated by the successful application of velocity averaging lemma to the study of regularity issue for stationary linearized Boltzmann equation in the whole space, we consider to give a similar account for the regularity problem in a bounded domain. However, we immediately notice that Definition 1.3 does not work for bounded space because that the Fourier transform is involved. For bounded domains, we adopt the fractional Sobolev space through the Slobodeckij semi-norm.
Definition 1.4.
Let , open. We say if and
| (1.10) |
with
| (1.11) |
Notice that Definition 1.3 and Definition 1.4 of fractional Sobolev spaces are equivalent on the whole space. In other words, for , there exist two positive constants and such that
| (1.12) |
for any .
Here, we shall first introduce our main result and then explain the multiple obstacles we encounter and how we overcome them. We consider a bounded convex domain which satisfies the following assumption.
Definition 1.5.
We say a bounded convex domain in satisfies the positive curvature condition if is of positive Gaussian curvature.
Remark 1.6.
Positive curvature condition implies uniform convexity, which would also imply strict convexity. If the domain is compact, then its being strictly convex is equivalent to being uniformly convex. On the contrary, a uniformly convex domain does not necessarily satisfy the positive curvature condition.
We consider the incoming boundary value problem for linearized Boltzmann equation in ,
| (1.13) |
where
and is the unit outward normal of at . In this context, satisfies one of hard sphere, cutoff hard, and cutoff Maxwellian potentials. The detailed assumption on will be addressed in Section 3.
Regarding the existence result of boundary value problem (1.13), it has been studied by Guiraud [18] for convex domains and by Esposito, Guo, Kim, and Marra [14] for general domains. In the paper of Esposito, Guo, Kim, and Marra [14], they proved the solution is continuous away from the grazing set. With stronger assumption on cross-section , namely,
| (1.14) |
the interior Hölder estimate was established in [6] and later improved to interior pointwise estimate for first derivatives [7]. Recently, the nonlinear case was established in [8] for hard sphere potential. Notice that, in [6, 7, 8], the fact improves regularity in velocity is a key property used. The idea is to move the regularity in velocity to space through transport and collision. This idea was inspired by the mixture lemma by Liu and Yu [22]. In contrast, in the present result, we do not need the smoothing effect of in velocity; the integral operator itself provides ”velocity averaging” and therefore regularity. Regarding regularity issues for the time dependent Boltzmann equation, we refer the interested readers to [19, 20].
In this article, we assume the following two conditions on the incoming data .
Assumption 1.7.
There are positive constants such that
| (1.15) |
and
| (1.16) |
for any and .
The main result of this paper is as follows.
Theorem 1.8.
Let bounded convex domain satisfy the positive curvature condition in Definition 1.5 and linearized collision operator satisfy angular cutoff assumption (2.5). Suppose the incoming data satisfies Assumption 1.7. Then, for any solution to stationary linearized Boltzmann equation (1.13), we have
| (1.17) |
for any .
We shall sketch the proof and reveal the difficulties induced by geometry and the method we tackle the problem.
Definition 1.9.
Let and . We define
| (1.18) |
Hereafter, we define
| (1.19) | ||||
| (1.20) |
Notice that and are bounded for with
where is the surface element on at . Performing Picard iteration, we have
| (1.21) |
where
| (1.22) | ||||
| (1.23) |
We observe that each is directly under influence of boundary data and the geometry of the domain. Our strategy is to prove . And, concerning the remaining term , we shall match up the regularity of boundary terms.
We point out the difference between the cases for the whole space and a bounded domain. Let be any measurable function defined in . We use the notation to denote its zero extension in . And, let be the zero extension operator from to , namely,
| (1.24) |
Suppose . Notice that
| (1.25) |
Therefore, applying Lemma 1.2, we have
Corollary 1.10.
The operator is bounded.
Remark 1.11.
However, if we want to further iterate, we have to take the geometric structure into consideration. As mentioned earlier, the method of Fourier transform does not apply to bounded domains. In this article, we adopt Slobodeckij semi-norm as an alternative concept of Sobolev function class. As a result, we have
Lemma 1.12.
The operator is bounded.
Therefore, if we end iteration at , we can already claim .
Considering piling up the regularity, we notice that
| (1.28) |
It seemingly comes to the limit of this strategy. Surprisingly, we have
Lemma 1.13.
is bounded for any . Furthermore, there is a constant independent of and such that
| (1.29) |
That is, zero extension only reduces infinitesimal regularity. Therefore, after zero extension, we can repeat our strategy and obtain the desired result.
The rest of the article is organized as follows. Section 2 gives a brief overview of the Boltzmann equation and the details of our setting. In Section 3, we recall several basic properties of the linearized collision operator. In Section 4, we recapitulate the velocity averaging for linearized Boltzmann equation in the whole space. Section 5 provides some geometric properties for bounded convex domains that will be used in our estimates. In Section 6, we study the regularity of transport equation in bounded convex domains. Section 7 is devoted to the regularity via velocity averaging.
2. Boltzmann Equation
The Boltzmann equation reads
| (2.1) |
Here, is the distribution function for the particles located in the position with velocity at time . The collision operator is defined as
| (2.2) |
where and are the velocities after the elastic collision of two particles whose velocities are and , respectively, before the encounter. Here, the cross-section is chosen according to the type of interaction between particles. The precise form of cross-section depends on the model that is being studied. To specify the properties of the cross-section, we adopt the following coordinates. We set
and choose and such that forms an orthonormal basis for , and define
Then,
| (2.3) | ||||
| (2.4) |
Throughout this article, regarding the cross-section, we apply Grad’s angular cutoff potential [17] by assuming
| (2.5) |
where, as mentioned above, depends on the model being studied. Our discussion includes hard sphere model (), cutoff hard potential (), and cutoff Maxwellian molecular gases (). Consider the stationary solution as a perturbation of the standard Maxwellian,
in the form
| (2.6) |
Plugging the expression (2.6) into (2.1) and discarding the nonlinear term, we arrive at the stationary linearized Boltzmann equation
| (2.7) |
with linearized collision operator , which reads
| (2.8) |
Under the assumption (2.5), can be decomposed into a multiplicative operator and an integral operator, see [17],
| (2.9) |
Here, is a function of velocity variable behaving like , i.e., there exist two positive constants and , depending only on , such that
| (2.10) |
for all . The integral operator reads
where the collision kernel is symmetric, that is, . Notice that the assumption of the cross-section here is different from and more general than that in [5, 7]. The significant difference is that the operator in the case we consider does not guarantee to have regularity in velocity variables.
Under the decomposition (2.9), we then consider the boundary value problem
| (2.11) |
Let us pause here to make clear that how trace is being defined. We follow [2, 3, 21]. For satisfying the equation
| (2.12) |
in , since according to Proposition 3.3, we have
| (2.13) |
for a.e. . For such , we fix , where
and consider the function
| (2.14) |
for , where is as defined in Definition 1.9. Noticing that
| (2.15) |
and the formulas for change of variables,
| (2.16) | ||||
| (2.17) |
we obtain for a.e. , which would imply is an absolutely continuous function on after possibly being redefined on a set of measure zero. As a result, we define
| (2.18) |
for
3. Properties of the linearized collision operator
In this section, we review some basic properties of the linearized collision operator , see [1, 17]. As mentioned earlier, under the assumption (2.5), can be decomposed into a multiplicative operator and an integral operator,
| (3.1) |
There are two constants such that the following inequality holds for all ,
| (3.2) |
The integral operator is defined as
and the collision kernel is symmetric. Furthermore, by Caflisch [1], we have an upper bound for ,
| (3.3) |
where is a constant depending only on . The following lemma by Caflisch [1] is crucial in our estimates.
Lemma 3.1.
For any positive constants , and , there exists depending only on , and such that
The above inequality combining with (3.3) immediately implies the following facts.
Corollary 3.2.
For any ,
| (3.4) | ||||
| (3.5) |
Proposition 3.3.
The integral operator is bounded for .
Proof.
We see from Proposition 3.3 is a bounded operator from to . In particular, we shall only use the case .
Proposition 3.4.
For any and , there is a constant independent of such that
| (3.8) |
Proof.
In Section 6, we will need the following estimate. The case for hard sphere is proved in [4]. More generally, the proof therein can be extended to the cases for cutoff hard and cutoff Maxwellian potentials.
Lemma 3.5.
Suppose that a function satisfies the following estimate for some constant ,
| (3.12) |
Then there exists a positive constant such that
| (3.13) |
where is a constant depending on .
4. Velocity averaging for linearized Boltzmann equation in the whole space
Lemma 1.2, which was first investigated in [9], plays an important role in our analysis. For readers’ convenience, we recapitulate the proof of Lemma 1.2 in this section. The idea of Lemma 1.2 originated from the velocity averaging lemma in [16], which can be proved by the method of Fourier transform. Roughly speaking, the averaging lemma can be stated as that if is a solution to the transport equation in with a source term ,
| (4.1) |
then, for any , a bounded and compactly supported function, the velocity average of satisfies
| (4.2) |
By analogy with the above result, we consider the transport equation in with a source term ,
| (4.3) |
(Notice that implies according to Proposition 3.3). Recall from (1.7)
| (4.4) |
A direct calculation shows that is a bounded operator from to for and the solution of (4.3) is expressed as
| (4.5) |
If we regard the integral operator as a kind of velocity averaging, then it is natural to anticipate has certain regularity in the space variable in view of (4.2). And it turns out we indeed have Lemma 1.2. In the following proof, we adopt the idea of Fourier transform in [16] with a careful application of Cauchy-Schwarz inequality. Furthermore, we also take advantage of (3.2) for the function to gain some integrability (see (4.13)) since the support of is not bounded. We also remark that Lemma 1.2 holds for any function satisfying (3.2) and any kernel satisfying (3.4) and (3.5).
Proof of Lemma 1.2.
We denote the Fourier transform in of a function by , the corresponding variable by . Since the operator does not involve the space vairable, a direct calculation shows that, for , we have
| (4.6) | ||||
| (4.7) |
For the case where , one can approximate by a sequence of functions in to obtain (4.6)-(4.7). To prove Lemma 1.2, it suffices to show the boundedness of integral
| (4.8) |
for given . Using identities (4.6), (4.7) and Cauchy-Schwarz inequality yields
| (4.9) |
By Corollary 3.2, we have
| (4.10) |
which leads to
| (4.11) |
where the second inequality follows from Corollary 3.2. Therefore, it follows that
| (4.12) |
where we have used Corollary 3.2 again in the last line. We observe that
| (4.13) |
As a result, we have
| (4.14) |
Denote the component of parallel to and the component perpendicular to respectively by
| (4.15) |
Consequently, we deduce
| (4.16) |
where the second inequality follows since for and is two-dimensional plane. This completes the proof. ∎
5. Geometric properties of bounded convex domains
In this section, we introduce some auxiliary geometric results involving bounded convex domains. Throughout this section, denotes a bounded strictly convex domain. Our strategy is to properly compare convex domain with spherical domains in so that we can build up estimates for convex domains based on those for spherical domains.
Let denote the unit outward normal of at , and denote the unit vector with the direction . We start with several geometric notations we shall frequently use.
Definition 5.1.
Let be the diameter of bounded domain . Namely, we define
| (5.1) |
For an interior point , let
| (5.2) |
be the distance from to . For and , we define to be the backward exit time for leaving with velocity , and we define to be the corresponding point that the backward trajectory touches . More precisely,
Furthermore, the absolute value of the component of velocity passing through the surface at is denoted by
| (5.3) |
In a similar fashion, we can define the corresponding forward concept by
The following two propositions from [7] concern estimates for backward trajectory.
Proposition 5.2.
Let be an interior point of and . Then
Proposition 5.3.
Let be interior points of and . If
, then
| (5.4) | |||
| (5.5) |
Definition 5.4.
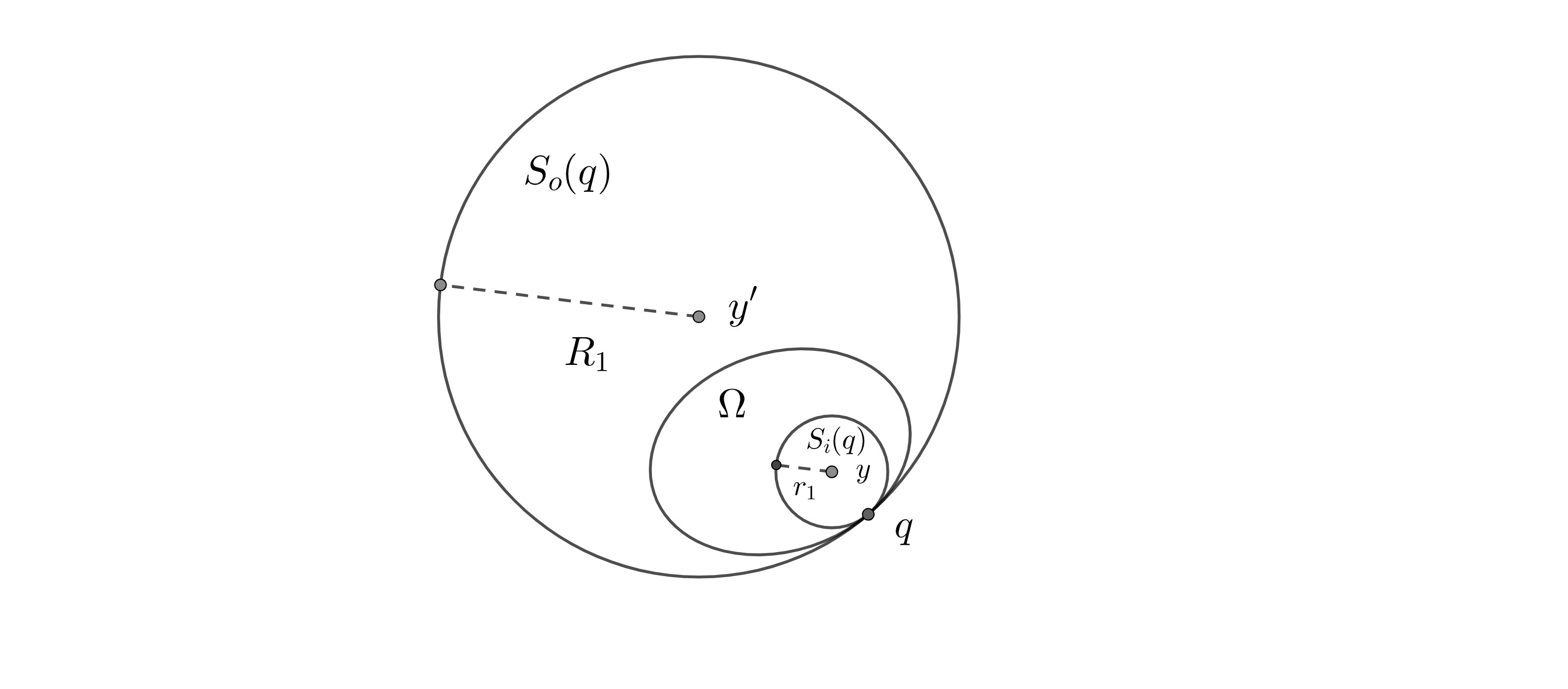
We say a bounded convex domain satisfies uniform interior sphere condition (resp. uniform sphere-enclosing condition) if there is a constant (resp. ) such that for any boundary point , there is a sphere (resp. ) such that (resp. ) with (resp. ). (See Figure 1.)
Proposition 5.5.
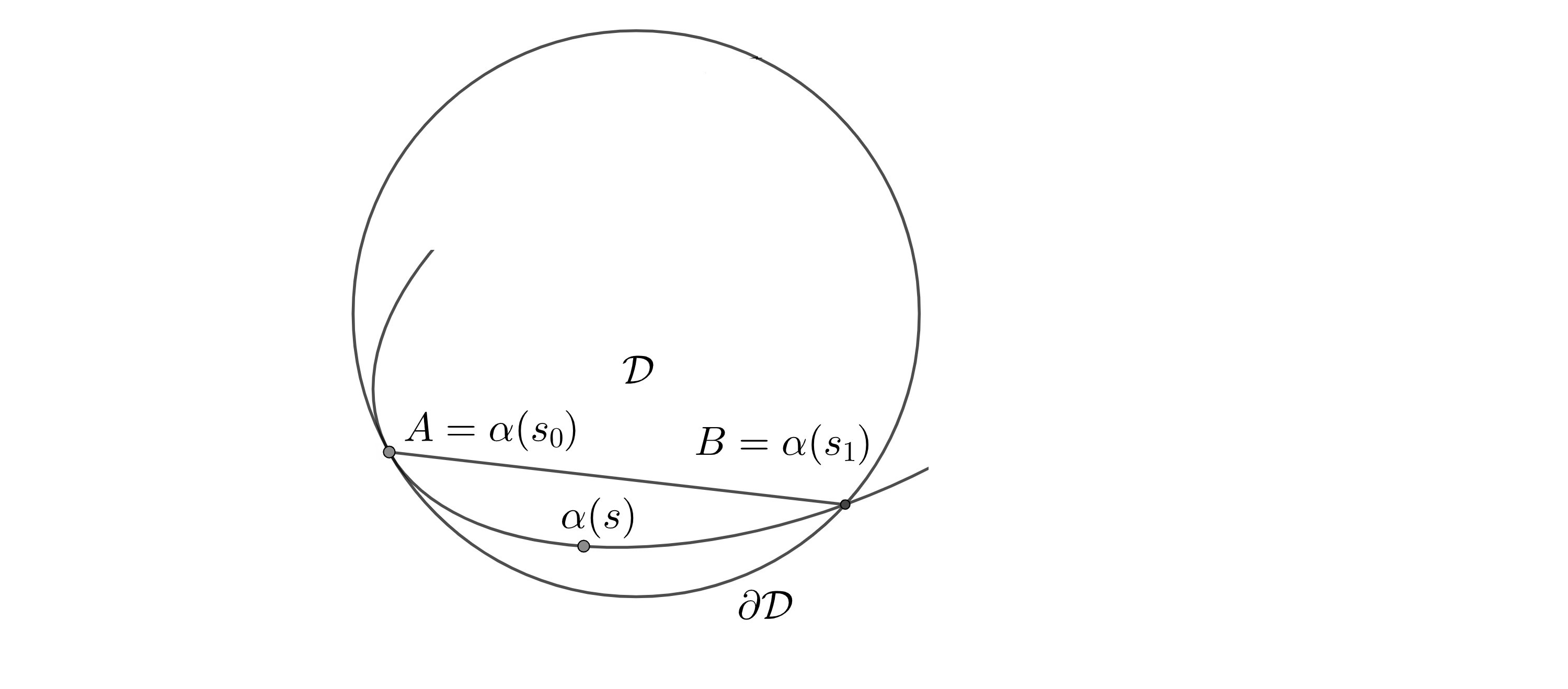
Let be a disk of radius and two points on . Suppose there is a regular parametrized curve connecting to contained in the circular segment bounded by chord and minor arc . We further assume that is convex, i.e. the curvature at is positive everywhere, is tangent to at , and leaves at as Figure 2 shows. Then, there exists such that .
Proof.
We may assume is parametrized by arc length. Let denote the vector . We choose such that forms a positively oriented orthonormal basis. Denote the signed angle from vector to tangent vector by . Therefore, . On the other hand, since , we obtain
| (5.6) |
Suppose for any . Then, for any ,
| (5.7) |
or
| (5.8) |
Hence, we have
| (5.9) |
where and . Since , we notice that
| (5.10) |
which leads to a contradiction. ∎
Proposition 5.6.
If satisfies the positive curvature condition in Definition 1.5, then it also satisfies both uniform interior sphere condition and uniform sphere-enclosing condition.
Proof.
Since is and compact, there is a tubular neighborhood near . That is, there exists a number such that whenever the segments of the normal lines of length , centered at and , are disjoint. This fact can be found in [13], for example. Let . For a given point , therefore we can consider the sphere such that . Clearly, satisfies the desired property.
Concerning uniform sphere-enclosing condition, we shall proceed the proof by contradiction. We denote the principal curvatures of at by and (). By positive curvature property of , we can choose such that . We claim that is a desired radius for the uniform sphere-enclosing condition. For a given point , there is such that and . Under suitable rotations and translations, can be locally expressed as the graph of a function at , where
| (5.11) |
Since has constant normal curvature , contains a neighborhood of in by (5.11). Suppose , then there exists such that the plane containing has the intersection curve with satisfies the condition of Proposition 5.5 with , , and . Then Proposition 5.5 implies that there is a point such that , where under the notation from Proposition 5.5. Hence, we note that the normal curvature of at satisfies
| (5.12) |
which is a contradiction. Therefore, we define . This completes the proof. ∎
Remark 5.7.
The above proof shows that is a uniform radius for sphere-enclosing condition for every small . Letting , we obtain the smallest and optimal radius .
The following lemma in [7] is useful in our estimates.
Lemma 5.8.
Suppose satisfies the positive curvature condition in Definition 1.5. Then there exists a constant such that, for any interior point , we have
| (5.13) |
where is the surface element of at point .
The following proposition concerns an estimate for chords in a bounded convex domain.
Proposition 5.9.
For a given bounded convex domain satisfying positive curvature condition in Definition 1.5, there exists a constant such that for any and , we have
| (5.14) |
Proof.
Remark 5.10.
Proposition 5.11.
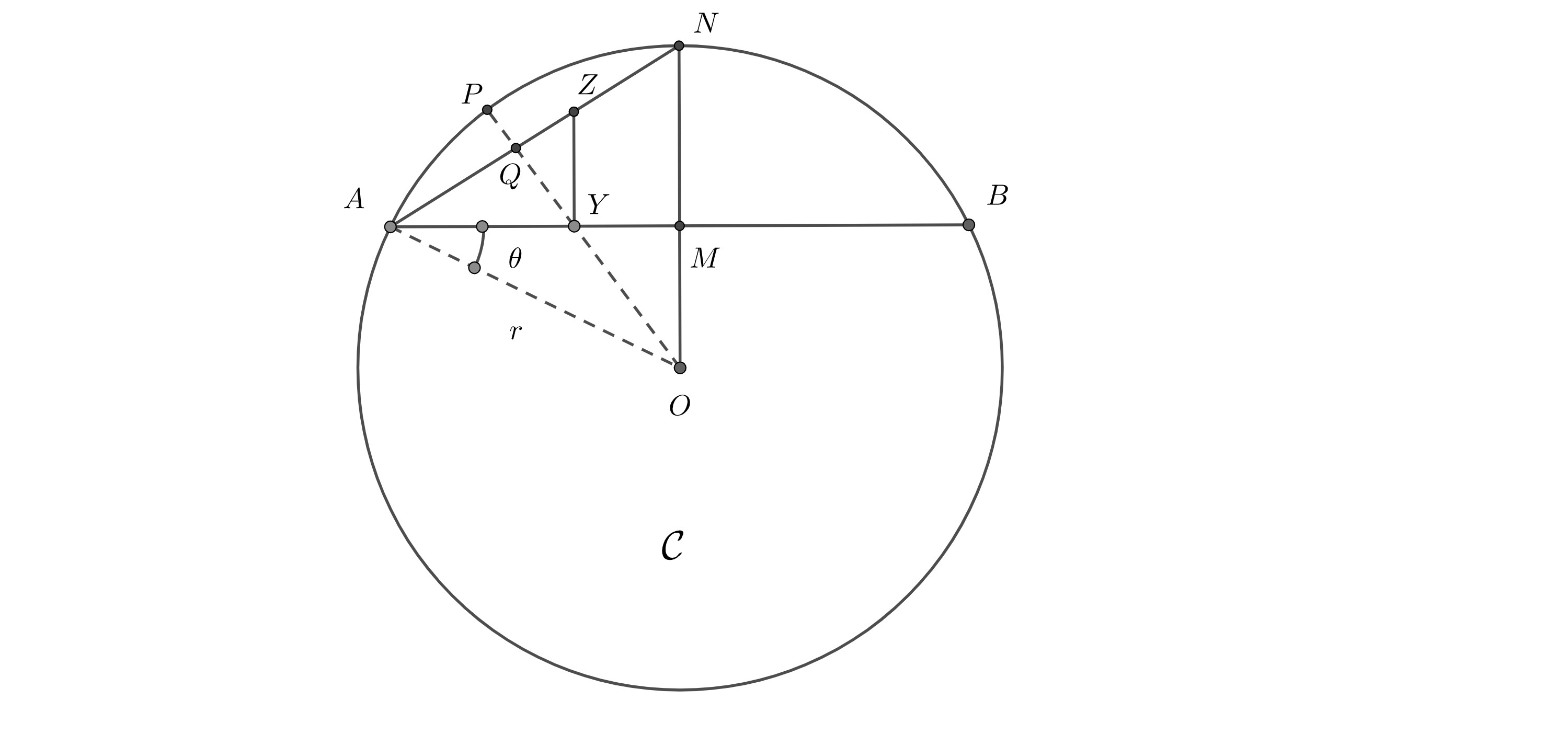
For a given circle in centered at with radius and two given points on . Let be the arc midpoint of (the minor arc) and be the midpoint of . Then for any (resp. ), we have
| (5.18) |
where is the point on (resp. ) such that (See Figure 3).
Proof.
Without loss of generality, we may assume . Let denote the angle . Suppose half-line meets at , respectively. Thus, . We also notice that
| (5.19) |
Therefore, . By the law of sines, we have
| (5.20) |
∎
We are now in a position to prove the following lemma.
Lemma 5.12.
Suppose satisfies the positive curvature condition in Definition 1.5. Then, there exists a constant such that for any and , we have
| (5.21) |
and
| (5.22) |
Proof.
The idea of proof is that we first show the lemma holds for balls. For general cases, we employ Proposition 5.6 to compare the convex domain with balls. For given , and . We denote and for simplicity. We claim
| (5.23) |
First, we shall prove that (5.23) holds for the case of balls in . Let be an open ball with radius centered at and be two points on . For , the following integral is bounded by some constant ,
| (5.24) |
Let be the intersection circle of and the plane passing through and . Denote the midpoint of by and write . For , it follows by Proposition 5.11 that
| (5.25) |
where and is as defined in Proposition 5.11. Therefore, we obtain
| (5.26) |
where the last inequality follows from the fact . The situation can be treated similarly. Therefore, (5.24) follows.
For general cases, we make a comparison with sphere cases. According to Proposition 5.6, there are spheres and with radii as defined in Definition 5.4. Denote the other intersection of and by , the other intersection of and by . For , we notice that
| (5.27) |
For , similarly we have
| (5.28) |
Therefore, in the case of , by (5.24) there exists a constant such that
| (5.29) |
If does not cover , we consider the convex hull of , denoted by . Clearly, one can see that
| (5.30) |
From solid geometry, we can see the following property.
Claim.
For , if (resp. ) or equivalently (resp. ), where , then we have the inequality
| (5.31) | ||||
| (5.32) |
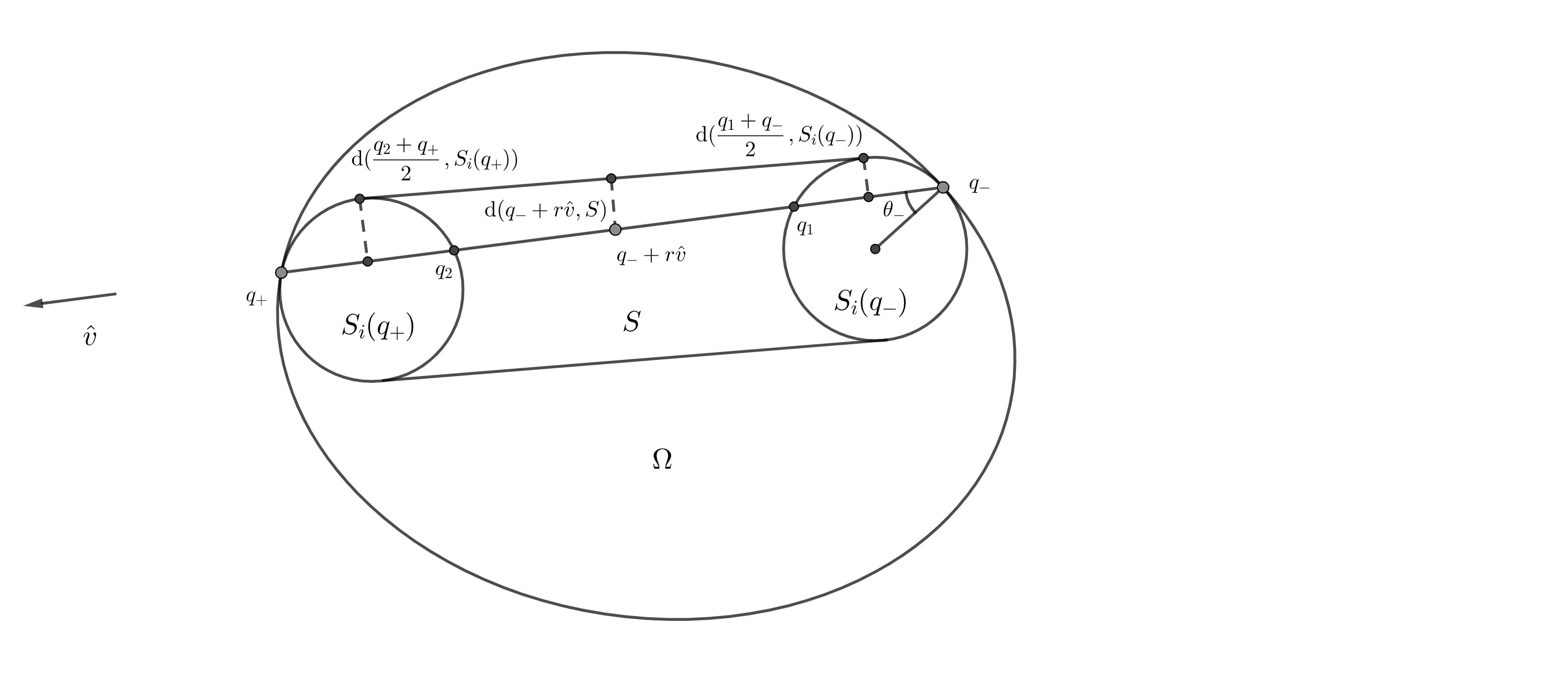
See Figure 4 for two-dimensional cases.
Recalling that from Remark 5.10, thus we deduce that, if ,
| (5.33) |
The inequality holds for similarly.
Let us now look at (5.22). We mimic the above proof for (5.23), since the steps proceed in the same way. For given , and , this time we claim
| (5.34) |
for some constant . For the cases of open balls in , we adopt the above notations and deduce that
| (5.35) |
where we have used . For general cases, we denote and for convenience. By considering the convex hull of again, if , we deduce
| (5.36) |
where we have used and in the last inequality. To complete the proof for (5.34), we consider sphere defined in Definition 5.4. Denote the other intersection of half-line and by , the midpoint of the line segment by . Clearly, we have
| (5.37) |
Hence, it follows that
| (5.38) |
Similarly, we have
| (5.39) |
We conclude that
| (5.40) |
The inequality holds for similarly. This completes the proof. ∎
Remark 5.13.
One can see that the behavior of integral depends heavily on boundedness of for . When , there is a constant independent of such that . On the other hand, there is no such constant whenever . We also notice that the integral blows up as .
Corollary 5.14.
Suppose satisfies the positive curvature condition in Definition 1.5. Then, there exists a constant such that, for any small , we have
| (5.41) |
Proof.
Let be an interior point of and be an orthonormal basis for . We note that
| (5.42) |
According to Lemma 5.12, it follows that
| (5.43) |
∎
6. Regularity of transport equation in a convex domain
Hereafter, denotes a bounded convex domain satisfying positive curvature condition in Definition 1.5 and denotes an incoming data satisfying Assumption 1.7.
Lemma 6.1.
Let as defined by (1.19). Then for any small .
Proof.
To prove the lemma, for given and an incoming data satisfying Assumption 1.7, it suffices to show the boundedness of integral
| (6.1) |
We partition the domain of integration into as below.
| (6.2) | ||||
| (6.3) |
In view of symmetry of , we only need to calculate the integral (6.1) over . Notice that
| (6.4) |
Consequently, we have
| (6.5) |
where
| (6.6) | ||||
| (6.7) |
To estimate , by Hölder continuity (1.16) and the fact from condition (1.15) that
| (6.8) |
we obtain
| (6.9) |
According to Proposition 5.3, we have
| (6.10) |
whenever . Proposition 5.2 implies that
| (6.11) |
Combining (6.8),(LABEL:eq:jgI1estimate2),(6.10), and (6.11), we have
| (6.12) |
For fixed , we introduce a change of variable with and . For any local chart of , say , we note that
and the Jacobian for is given by
| (6.13) |
Covering by finitely many such coordinate charts, we obtain the formula for change of variables
| (6.14) |
for any . Therefore, by the change of variables, we obtain
| (6.15) |
Letting yields
| (6.16) |
The third inequality above follows from Lemma 5.8 and the last inequality follows from Corollary 5.14 and the fact
| (6.17) |
for small .
Concerning , the condition (1.15) implies that
| (6.18) |
By the mean value theorem and Proposition 5.3, we obtain
| (6.19) |
Proposition 5.2 implies that
| (6.20) |
Taking (LABEL:eq:jgI2estimate1),(6.19), and (6.20) into consideration, we obtain
| (6.21) |
Comparing (6.21) with (6.12), one can repeat the steps in (6.12), (LABEL:eq:jgIntegral1ChangeOfVariable1), and (6.16) to obtain the following boundedness,
This completes the proof. ∎
Since is a bounded operator regarding velocity variable, we can see that would preserve regularity in space variable.
Proposition 6.2.
The operator is bounded for any small .
Next, we deal with regularity preservation of . Recall
| (6.22) |
Lemma 6.3.
Suppose and there exist positive constants and such that . Then for any small .
Proof.
To prove the lemma, for given and with , it suffices to show the boundedness of integral
| (6.23) |
where as defined by (6.2). In domain , we have
| (6.24) |
Therefore, we have
| (6.25) |
where
| (6.26) | ||||
| (6.27) |
Concerning , by Cauchy-Schwarz inequality, we obtain
| (6.28) |
where is an extension of as defined in [11, Theorem 5.4].
Remark 6.4.
By Theorem 5.4 from [11], we know can be continuously embedded in . That is, there exists a constant such that, for given , there is an extension of , i.e., , satisfying
For a.e. fixed , we then define .
Consequently, we deduce that
| (6.29) |
where we have used the change of variables
| (6.30) |
Regarding , we notice that
| (6.31) |
Proposition 5.2 implies that
| (6.32) |
By Proposition 5.3, we have
| (6.33) |
Combining (6.31)-(6.33), we deduce
| (6.34) |
To show the boundedness of above integral on the right, comparing (6.34) with (6.12), one can repeat the steps in (6.12), (LABEL:eq:jgIntegral1ChangeOfVariable1), and (6.16) to conclude . ∎
Corollary 6.5.
Let be as defined by (1.22). Then,
for each .
Proof.
We prove by induction on .
Step 1 .
For , since , follows by Lemma 6.1. For , we notice that
| (6.35) |
In view of Lemma 3.5, we have
| (6.36) |
where we may assume . With this in mind, Lemma 6.3 guarantees that . Moreover, by noticing that
| (6.37) |
we see that
| (6.38) |
Step 2.
Suppose for some , we have
| (6.39) |
and
| (6.40) |
Then Lemma 3.5 implies
| (6.41) |
Applying Lemma 6.3 again yields
| (6.42) |
Finally, we also notice that (6.37) implies
| (6.43) |
We conclude that for each by induction. ∎
7. Regularity via velocity averaging
This section is devoted to the regularity due to velocity averaging. In contrast to Section 4, we address the velocity averaging effect in bounded convex domains instead of the whole space. As mentioned in the introduction, the method of Fourier transform does not apply to bounded domains. To remedy this crux, we adopt Slobodeckij semi-norm as an alternative concept of Sobolev function class, see Definition 1.4. Hence, the difficulty shifts to estimates of singular integrals. To carry out this strategy, we introduce changes of coordinates, see Lemma 7.1 and Lemma 7.2, to obtain the boundedness of the aforementioned singular integrals.
We begin with the proof of Corollary 1.10. Recall from (1.24) that the notation denotes the zero extension of from to and is the zero extension operator from to .
Proof of Corollary 1.10.
Lemma 7.1.
We have the following formula for change of variables for any non-negative measurable function .
| (7.3) |
Proof.
Let and denote the domain of integration on the left hand side and right hand side of (LABEL:eq:ChangeOfVariable1), respectively. We consider the change of variables
| (7.4) |
Let be defined by
and be defined by .
Step 1 . is well-defined.
To verify well-definedness of , for given , clearly. We also notice that
| (7.5) |
Therefore, and is well-defined.
Step 2 . is well-defined.
To verify well-definedness of , for given , clearly. We note that
| (7.6) |
Therefore, and is well-defined.
Since and the Jacobian for the change of variables is clearly constant , we have
(LABEL:eq:ChangeOfVariable1).
∎
Lemma 7.2.
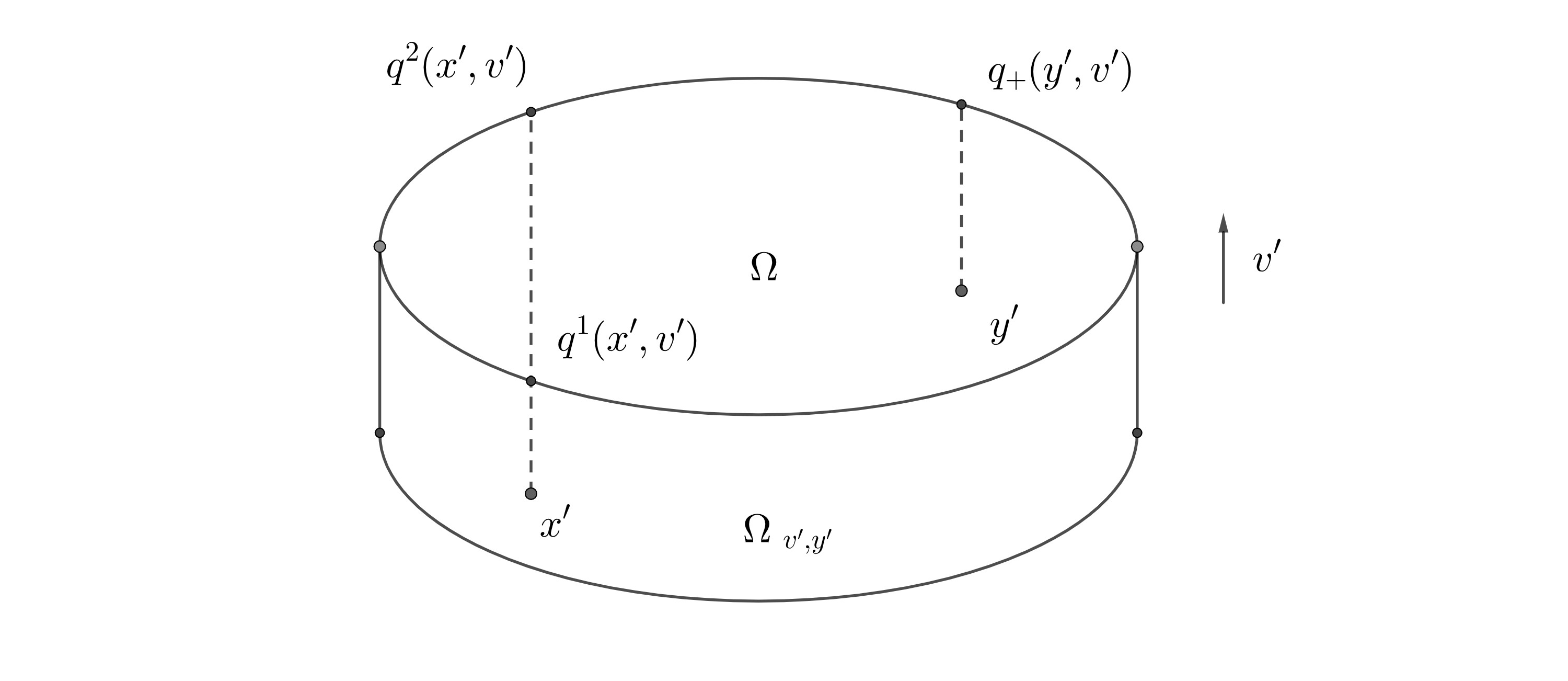
Remark 7.3.
An alternative way to characterize is as follows. We first define
| (7.9) |
Then, can be expressed as
| (7.10) |
Proof.
We denote the domain of integration on the left hand side and right hand side by and , respectively. This time we consider
| (7.11) |
Let be defined by and be defined by
.
Step 1 . is well-defined.
For given , clearly we have
and and there are two positive numbers
such that
Moreover, comparing the distances results in
| (7.12) |
On the other hand, we notice
| (7.13) |
We conlcude that and therefore is well-defined.
Step 2 . is well-defined.
For given , since , we have
. Likewise, since
we have . Comparing the distances yields
| (7.14) |
Therefore, it follows that and therefore is
well-defined.
Since and the Jacobian for the change of variables is clearly constant , we conclude
(LABEL:eq:ChangeOfVariable2). This completes the proof.
∎
Proposition 7.4.
Let be a function belonging to . Then, there exists a constant such that
| (7.15) | ||||
| (7.16) |
Proof.
By Cauchy-Schwarz inequality, we see that
| (7.17) |
where . Furthermore, Corollary 3.2 implies that
| (7.18) |
We are now in a position to prove Lemma 1.12.
Proof of Lemma 1.12.
For given , we recall denotes the function . To prove the lemma, it suffices to show
| (7.20) |
where is as defined by (6.2). According to Corollary 1.10, we have
| (7.21) |
In domain , we notice that . Therefore,
| (7.22) |
Hence, we have
| (7.23) |
where
| (7.24) | ||||
| (7.25) |
To estimate , taking and in the steps of (LABEL:eq:SOextension1) and (6.29), in the same fashion, we conclude
| (7.26) |
where we have used (7.21). To deal with , by Cauchy-Schwarz inequality again, we have
| (7.27) |
For small ,
| (7.28) |
where the last inequality follows from Proposition 5.3. On the other hand, the change of variable results in
| (7.29) |
Combining (7.27)-(7.29), we have
| (7.30) |
Therefore, it follows that
| (7.31) |
Letting and , by Lemma 7.2, we obtain
| (7.32) |
where we have utilized Proposition 5.9 by identifying and . Noticing that from (7.8), lies outside of , we have
With this in mind, we deduce
| (7.33) |
Proposition 7.4 and Lemma 7.1 imply
| (7.34) |
where and we have used Lemma 5.12 in the last line. Utilizing Proposition 3.4, we conclude
| (7.35) |
This completes the proof. ∎
Let us elaborate on Lemma 1.13 for a while. For , in view of Lemma 1.12, the function belongs to . Now consider its zero extension in the whole space . We claim that belongs to for any and
| (7.36) |
for some constant .
Proof of Lemma 1.13.
Recall and . Since vanishes outside of , we have
| (7.37) |
where
| (7.38) | ||||
| (7.39) | ||||
| (7.40) |
Regarding the boundedness of , by Lemma 1.12, we have
| (7.41) |
By symmetry, one can see that . Consequently, the remaining task is to deal with . We observe that, for ,
| (7.42) |
By Proposition 7.4, we have
| (7.43) |
Therefore, first combining (7.42) and (7.43) and performing the change of variable as in Lemma 7.1, we deduce that
| (7.44) |
where the third inequality follows from Lemma 5.12 and the last inequality follows from Proposition 3.4. Applying Proposition 7.4 again, we have
| (7.45) |
Then, it follows that
| (7.46) |
where . Similarly, by Lemma 5.12 and Proposition 3.4, we conclude that
| (7.47) |
Corollary 7.5.
The operator is bounded for any .
Proof.
We are now ready to prove the last lemma in this section.
Lemma 7.6.
The operator is bounded for any . Therefore, .
Proof.
We shall prove this lemma in a similar fashion as we prove Lemma 1.12. To do so, for given and , it suffices to show
| (7.51) |
where is as defined by (6.2). According to Corollary 7.5, it follows that
| (7.52) |
In domain , we have
| (7.53) |
Therefore, we have
| (7.54) |
where
| (7.55) | ||||
| (7.56) |
To estimate , taking in the steps of (LABEL:eq:SOextension1) and (6.29), in the same fashion, we conclude
| (7.57) |
where we have used (7.52). Concerning , we proceed as in (7.30)-(7.34) to deduce
| (7.58) |
| (7.59) |
where we utilized (5.22) of Lemma 5.12 in the last line instead. Continuing as in (7.35) yields
| (7.60) |
The last line above is (LABEL:eq:fdintegral) with in place of . In the same fashion, we can conclude that
| (7.61) |
This completes the proof. ∎
Remark 7.7.
From our calculation, we are not able to show that . As a result, we can not further improve regularity by the same method as in Corollary 7.5.
Acknowledgements: The first author is supported in part by MOST grant 108-2628-M-002 -006 -MY4 and 106-2115-M-002 -011 -MY2. The third author is supported by NCTS and MOST grant 104-2628-M-002-007-MY3.
References
- [1] Caflisch, R. E. (1980). The Boltzmann equation with a soft potential. Communications in Mathematical Physics, 74(1), 71-95.
- [2] Cessenat, M. (1984). Théoremes de trace Lp pour des espaces de fonctions de la neutronique. Comptes rendus des séances de l’Académie des sciences. Série 1, Mathématique, 299(16), 831-834.
- [3] Cessenat, M., & DAUTRAY, R. (1985). Théoremes de trace pour des espaces de fonctions de la neutronique. Comptes rendus des séances de l’Académie des sciences. Série 1, Mathématique, 300(3), 89-92.
- [4] Chen, I. K., Liu, T. P., & Takata, S. (2014). Boundary singularity for thermal transpiration problem of the linearized Boltzmann equation. Archive for Rational Mechanics and Analysis, 212(2), 575-595.
- [5] Chen, I. K., & Hsia, C. H. (2015). Singularity of macroscopic variables near boundary for gases with cutoff hard potential. SIAM Journal on Mathematical Analysis, 47(6), 4332-4349.
- [6] Chen, I. K. (2018). Regularity of stationary solutions to the linearized Boltzmann equations. SIAM Journal on Mathematical Analysis, 50(1), 138-161.
- [7] Chen, I. K., Hsia, C. H., & Kawagoe, D. (2019, May). Regularity for diffuse reflection boundary problem to the stationary linearized Boltzmann equation in a convex domain. In Annales de l’Institut Henri Poincaré C, Analyse non linéaire (Vol. 36, No. 3, pp. 745-782). Elsevier Masson.
- [8] Chen, H., & Kim, C. (2020). Regularity of Stationary Boltzmann equation in Convex Domains. arXiv preprint arXiv:2006.09279.
- [9] Chuang, P. H. (2019). Velocity Averaging Lemmas and Their Application to Boltzmann Equation (Mater’s thesis). Available from airiti Library. (U0001-2107201920343100) doi:10.6342/NTU201901751
- [10] Desvillettes, L. (2003). About the use of the Fourier transform for the Boltzmann equation. Riv. Mat. Univ. Parma, 7(2), 1-99.
- [11] Di Nezzaa, E., Palatuccia, G., & Valdinocia, E. (2012). Hitchhiker’s guide to the fractional Sobolev spaces. Bull. Sci. Math, 136(5), 512-573.
- [12] DiPerna, R. J., & Lions, P. L. (1989). On the Cauchy problem for Boltzmann equations: global existence and weak stability. Annals of Mathematics, 321-366.
- [13] Do Carmo, M. P. (2016). Differential geometry of curves and surfaces: revised and updated second edition. Courier Dover Publications.
- [14] Esposito, R., Guo, Y., Kim, C., & Marra, R. (2013). Non-isothermal boundary in the Boltzmann theory and Fourier law. Communications in Mathematical Physics, 323(1), 177-239.
- [15] Golse, F., Perthame, B., & Sentis, R. Un rsultat de compacité pour les équations de transport. CR Acad. Sci. Paris I Math. 301 (1985) 341, 344.
- [16] Golse, F., Lions, P. L., Perthame, B., & Sentis, R. (1988). Regularity of the moments of the solution of a transport equation. Journal of functional analysis, 76(1), 110-125.
- [17] Grad, H. Asymptotic theory of the Boltzmann equation. II, 1963 Rarefied Gas Dynamics (Proc. 3rd Internat. Sympos., Palais de l’UNESCO, Paris, 1962). Vol. I, 26-59.
- [18] Guiraud, J. P. (1970). Probleme aux limites intérieur pour l’équation de Boltzmann linéaire. J. Mécanique, 9, 443-490.
- [19] Guo, Y., Kim, C., Tonon, D., & Trescases, A. (2016). BV-regularity of the Boltzmann equation in non-convex domains. Archive for Rational Mechanics and Analysis, 220(3), 1045-1093.
- [20] Guo, Y., Kim, C., Tonon, D., & Trescases, A. (2017). Regularity of the Boltzmann equation in convex domains. Inventiones mathematicae, 207(1), 115-290.
- [21] Kawagoe, D. (2018). Regularity of solutions to the stationary transport equation with the incoming boundary data.
- [22] Liu, T. P., & Yu, S. H. (2004). The Green’s function and large‐time behavior of solutions for the one‐dimensional Boltzmann equation. Communications on Pure and Applied Mathematics: A Journal Issued by the Courant Institute of Mathematical Sciences, 57(12), 1543-1608.