A Small-Gain Theorem for Discrete-Time Convergent Systems and Its Applications
Abstract
Convergent, contractive or incremental stability properties of nonlinear systems have attracted interest for control tasks such as observer design, output regulation and synchronization. The convergence property plays a central role in the neuromorphic (brain-inspired) computing of reservoir computing, which seeks to harness the information processing capability of nonlinear systems. This paper presents a small-gain theorem for discrete-time output-feedback interconnected systems to be uniformly input-to-output convergent (UIOC) with outputs converging to a bounded reference output uniquely determined by the input. A small-gain theorem for interconnected time-varying discrete-time uniform input-to-output stable systems that could be of separate interest is also presented as an intermediate result. Applications of the UIOC small-gain theorem are illustrated in the design of observer-based controllers and interconnected nonlinear classical and quantum dynamical systems (as reservoir computers) for black-box system identification.
Index Terms:
Convergent dynamics; Reservoir computing; Small-gain; Input-to-output stability.I Introduction
Convergence notions, such as incremental stability [1], convergent dynamics [2, 3] and contracting dynamics [4], impose that all solutions must “forget” their initial conditions and converge to each other asymptotically; also see [5] for a survey of such convergence properties in the discrete-time setting. Such properties have found applications in observer design [1, 4], output regulation [6, 7] and synchronization [1, 8].
In an independent development, efforts to go beyond the von Neumann computing architecture to imitate human capabilities in tasks that are difficult or energetically expensive on conventional digital computers, have led to the pursuit of neuromorphic (brain-inspired) computing paradigms implemented on physical hardware. Central to this is to exploit high-dimensional nonlinear dynamical systems for processing of time-varying input signals. An emerging neuromorphic paradigm is reservoir computing (RC) [9, 10], which uses a fixed but otherwise almost arbitrary dynamical system, the so-called “reservoir”, to map inputs into its state-space. This paper is interested in discrete-time reservoir computers (also abbreviated as RCs) that perform causal nonlinear operations on input sequences to produce output sequences. Only a simple linear regression algorithm is required to optimize the parameters of a readout function to approximate target output sequences. In the RC paradigm, convergence (referred to as the echo-state property in the RC literature) ensures that the reservoir outputs are asymptotically independent of its initial condition, and the reservoir induces an input-output (I/O) map to approximate a target I/O map [11].
A prominent example of RCs are the echo state networks (ESNs), which have demonstrated remarkable ability to predict chaotic time series [12, 13]. There is substantial interest in hardware realizations of RC for fast processing using less memory and energy, as opposed to software-based implementation on digital computers. For instance, a photonic RC achieved high-speed speech classification (million words per second) with low error rates [14] and a FPGA-based RC reached an 160 MHz rate for time-series prediction [15]; see [16, 17, 18] for other recent RC hardware implementations. Its extremely efficient training makes RC suitable for applications such as edge computing, in which information processing is incorporated into decentralized sensors (the ‘edges’) to reduce computation and transmission overhead [19]. For more recent developments, see [9, 10, 19].
Recent years have also seen the advent of noisy near-term intermediate scale quantum (NISQ) computers [20], which are not equipped with quantum error correction and can only perform a limited form of quantum computing, made available via cloud-based access from companies such as IBM [21]. This has led to the proposal of RCs that exploit nonlinear quantum dynamics (referred to as QRC) [22, 23]. Control-oriented applications of QRCs were put forward in [24] and Ref. [25] further develops a QRC scheme that can be implemented on NISQ computers and demonstrates a proof-of-principle of QRC on cloud-based IBM superconducting quantum computers [21]. This work provides further theoretical support for the application of RC and QRC for black-box system identification of discrete-time nonlinear systems, with examples developed in Section IV. Since QRCs can have a high-dimensional underlying Hilbert space, it may be advantageous for identifying systems with a high-dimensional state-space.
This paper focuses on uniformly convergent dynamics or the uniform convergence (UC) property. For output-feedback interconnected systems, we introduce the uniform output convergence (UOC) and the uniform input-to-output convergence (UIOC) properties. Roughly speaking, a UOC system has a unique reference state solution with its reference output defined and bounded both backwards and forwards in time. All other outputs asymptotically converge to the reference output, independent of their initial conditions. The UIOC property adapts the uniform input-to-state convergence (UISC) property [2] to output-feedback interconnected systems. A UIOC system is UOC and the perturbation in its reference outputs are asymptotically bounded by a nonlinear gain on the input perturbation. We present a small-gain theorem for output-feedback interconnected systems to be UIOC, and that the closed-loop system induces a well-posed I/O map in the sense of [26].
Our UIOC small-gain theorem is based on a small-gain theorem for time-varying discrete-time systems in the uniform input-to-output stability (UIOS) framework, also presented herein. This latter small-gain result is used to establish the UIOC small-gain theorem for interconnected time-invariant UOC systems, the time-variance arising through a change of variables. Small-gain criteria for time-varying continuous-time interconnected systems in the UIOS framework have been established [27, 28, 29, 30]. Ref. [31] develops a generalized small-gain theorem that recover the previous results for specific interconnections. Small-gain criteria for time-invariant discrete-time systems can be found in [32, 33]. Here, we adopt the techniques in [31] to establish a UIOS small-gain theorem for output-feedback interconnected time-varying discrete-time systems. Ref. [29] is based on [34, Lemma 3, Prop. 2.5], which also concerns continuous-time systems, and is not immediately applicable to our setting. Furthermore, [32, 33] do not carry over to time-varying systems [35]. Therefore, we establish a link to bridge our setting with the continuous-time results of [31].
Finally, we apply our results to observer-based controller design for globally Lipschitz systems [36, 37] and to design RC parameters for black-box system identification of discrete-time nonlinear systems solely based on I/O data collected from a system. Example nonlinear models for black-box system identification include NARMAX [38], the Volterra series [39] and block-oriented models [40, 41]. The use of closed-loop structures, such as in the Wiener-Hammerstein feedback model, is motivated by modeling systems that exhibit nonlinear feedback behavior [41]. Here we introduce interconnected ESNs and QRCs as models with closed-loop structures. The interconnected ESNs and QRCs dynamics are arbitrary but fixed at the onset, as long as they satisfy the UIOC small-gain theorem. Only an RC output function is optimized via ordinary least squares to fit the data, making the RC approach computationally efficient. We illustrate numerically the efficacy of this approach to model a feedback-controlled nonlinear system.
Notation. is the Euclidean norm. and () denote, respectively, integers (reals) and integers (reals) larger than equal to . is a column vector and its transpose. For , is their concatenation into a column vector. For a sequence on , for any and . denotes the set of bounded sequences on , i.e., if and . For any sequences on , is given by . Function composition is denoted by . We use standard comparison function classes and [28]111A function is a function if it is continuous, strictly increasing and . A function is a function if it is unbounded. A function is in the first argument and decreasing (i.e., non-increasing) in the second argument, with for all . As in [28, 42], we do not require a function to be continuous or strictly decreasing in the second argument..
II Stability concepts
This section defines the uniform output convergence (UOC) (Def. 2) and the uniform input-to-output convergence (UIOC) (Def. 4) properties. See Table I for a summary of relevant stability definitions. We first set some preliminaries.
For , consider a time-varying discrete-time system,
| (1) |
where is the state, is the input and is the output. We assume that and for each , and . These conditions ensure that the system is non-singular at any time and for any initial condition.
The following definition of UOC adapts the uniform convergence (UC) property [5, Def. 3] to systems with output of the form (1).
Definition 1
For any , a solution to (1) and its corresponding output are a reference state solution and the corresponding reference output, respectively, if they are defined for all , with and .
Definition 2
System (1) is uniformly output convergent (UOC) if, for any input ,
-
(i)
There exists a unique reference state solution with its corresponding reference output .
-
(ii)
There exists independent of such that, for any with and ,
| (2) |
System (1) with is uniformly convergent (UC) if, for any ,
-
(i)
There exists a unique reference state solution .
-
(ii)
There exists independent of such that, for any with and ,
| (3) |
Remark 3
The UIOC property further extends the UOC property, and ensures that the perturbation in the reference outputs is asymptotically bounded by a nonlinear gain of the input perturbation. The following definition of UIOC is a discrete-time analogue of the UISC property defined in [2, Def. 3] adapted to systems with output of the form (1).
Definition 4
System (1) is uniformly input-to-output convergent (UIOC) if it is UOC and for any , with the reference state solution and its reference output associated to , and any solution with any initial condition and the corresponding output associated to , there exists such that, for all with ,
| (4) |
System (1) with is uniformly input-to-state convergent (UISC) if it is UC and
| (5) |
We conclude this section by summarizing the aforementioned stability concepts and their acronyms in Table I.
III A UIOC small-gain theorem
In this section, we present our main UIOC small-gain theorem (Theorem 5). We first set some preliminaries.
For , consider the interconnected system (see Fig. 1),
| (6) |
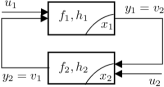
For subsystems , are states, are outputs and are inputs with . Throughout, we assume that the interconnected system (6) is well-posed. That is, for any with and any initial conditions , there exists a unique solution solving the algebraic equations and .
For a well-posed system (6), let be the closed-loop solution to input , starting at . Note that the closed-loop system is causal by definition.
We also assume that the subsystems in (6) are UOC. Each UOC subsystem induces an I/O map defined by , where is the reference output. By construction is causal, meaning that for any and any ,
| (7) |
where for and zero otherwise. We say that system (6) induces a well-posed closed-loop I/O map if the algebraic equations and have a unique bounded solution , and the closed-loop I/O map is causal [26], where . We emphasize the difference between a well-pose system (6) and a well-posed closed-loop I/O map induced by (6).
We now state our main UIOC small-gain theorem.
Theorem 5
Consider a well-posed system (6) with UOC subsystems . For any inputs , let and be the corresponding reference state solutions and outputs. For any other inputs with , let and be any corresponding solutions and outputs with initial conditions . Suppose that there exists and (independent of ) such that, for all , and any ,
| (8) |
| (9) |
If (or equivalently [43, Chapter 8.1]) for all , for any and , the closed-loop solution and its output are bounded, i.e., and . Further, the closed-loop system (6) induces a well-posed closed-loop I/O map and system (6) is UIOC.
Remark 6
The main idea in the proof of Theorem 5 is to use the Banach fixed point theorem to show system (6) induces a well-posed closed-loop I/O map. To show that system (6) is UIOC, we apply a change-of-coordinate argument in which the system under consideration becomes time-varying of the form (11). We then apply a uniform input-to-output stability (UIOS) small-gain theorem (Theorem 8) to system (11) to establish the UIOC property of (6). We first define UIOS and state Theorem 8 whose full proof is given in Appendix A.
Definition 7
System (1) is uniformly input-to-output stable (UIOS) if there exists and such that, for any , with and ,
| (10) |
Theorem 8
Consider a well-posed time-varying system
| (11) |
For , suppose that there exists and such that, for any with , with and ,
| (12) |
| (13) |
If (or equivalently ) for all , then for any and , the closed-loop solution and its output are bounded, i.e., and . Furthermore, the closed-loop system (11) is UIOS.
We now detail the proof for Theorem 5.
Proof:
For any fixed inputs , the I/O map induced by each subsystem is given by . For any , let and take the supremum over in (8),
| (14) |
Consider the composition . Applying inequality (14) twice, we have
Therefore, is a strict contraction on . Its unique fixed point given by the Banach fixed-point theorem [44] is the reference output of subsystem . The corresponding reference output of subsystem is . A symmetric argument shows that is a strict contraction defined on .
To show that the closed-loop I/O map is causal, for any , consider the unique fixed point of . Causality follows if . Re-express (7) as ,
Similarly, . Note that is a strict contraction, by the Banach fixed point theorem we have .
To establish closed-loop UIOC, let be the reference state solution to subsystem with respect to input and analogously for . Then is the closed-loop reference state solution. Let be any other closed-loop solution and its corresponding output to another input , starting at . From (8) and (9), the same argument as in the proof of Theorem 8 shows that , .
Sometimes it is convenient to upper bound in (8) by a sum instead of of nonlinear gains. That is,
| (15) |
Theorem 5 can be applied to this scenario by re-writing (15) in terms of of nonlinear gains. If system (6) satisfies (15) instead of (8), to ensure UIOC of (6), the condition for all needs to be strengthened to (16) below. We first present a lemma that allows us to re-write (15) in terms of .
Lemma 9
Given any , for any , it holds that .
Proof:
Since , its inverse exists and is in . Consider two cases. Suppose , then . Otherwise, . Applying on both sides gives and . ∎
Corollary 10
Consider a well-posed system (6) with UOC subsystems. For any inputs , let and be the corresponding reference state solutions and outputs. For any other inputs with , let and be any corresponding solutions and outputs with initial conditions . Suppose that there exists and such that, for all with and any , (9) and (15) hold. If there exists such that for all ,
| (16) |
where is the identity map. Then for any and , the closed-loop solution and output are bounded, i.e., and . Further, system (6) is UIOC and induces a well-posed closed-loop I/O map.
We can further apply Theorem 5 and Lemma 9 to system (6) with . In this case, Theorem 5 ensures the UISC property of system (6), leading to the following Corollary.
Corollary 11
Consider a well-posed system (6) with and UC subsystems. For any inputs , let be the corresponding reference state solutions. For any other inputs with , let be any corresponding solutions with initial conditions . Suppose that there exists and such that, for all , and any ,
| (17) |
If (16) holds, then for any and , the closed-loop solution is bounded, i.e., . Further, system (6) is UISC.
IV Applications
This section demonstrates potential applications of Theorem 5 on observer design and black-box system identification.
IV-A Observer-based controller design
The conventional observer-based controller design approach first finds a desired solution of the closed-loop system . It then ensures that for any other solution , is asymptotically stable. Since typically depends on , it can be difficult to analyze the asymptotic stability of . Recently, the convergence approach has been applied to observer-based control in continuous-time, which may circumvent the cumbersome stability analysis in the conventional approach [2]. The convergence approach first designs an observer and a feedback controller so that the closed-loop system is UC. This ensures that the closed-loop system induces a well-posed I/O map and the internal states are bounded. Secondly, a feedforward controller is designed to shape the closed-loop system’s response. Here, we employ Theorem 5 to achieve the first step in the convergence approach.
For , consider a nonlinear plant
with state , control , external input and output . Construct an observer,
where and if . In general, can be a nonlinear function. Let , then and the observer error dynamics is
where are viewed as inputs to the error dynamics. Consider the interconnected system (18) (see Fig. 2),
| (18) |
where is the input. Our goal is to employ Theorem 5 to design the observer gain and the controller such that the closed-loop system is UISC. To achieve this goal, we employ the following Corollary of Theorem 5 to system (18), whose full proof is given in Appendix B.

Corollary 12
Consider a well-posed system (18). Suppose that for any inputs with , there exists such that, for any and ,
| (19) |
Suppose that the -subsystem is UC and let be the reference solution to . For any other input with , let be any solution. Suppose that there exists such that for any and ,
| (20) |
It follow that system (18) is UISC.
As a concrete example, we employ Corollary 12 to a design observer-based controller for a Lur’e system with a globally Lipschitz nonlinearity modified from [45, Example 1],
with output , and
Here, for any , we have
Consider a Luenberger observer with gain ,
where . In Appendix C, we show that the observer error dynamics satisfies (19) if there exists , , and such that
| (21) |
Consider a linear state-feedback law with gain . The plant subject to becomes
| (22) |
where are viewed as inputs. Let be any solutions starting at to inputs and , respectively. Let , then
| (23) |
where . We employ [3, Theorem 1] to show that the plant (23) is UC. Firstly, consider . From (23), we have . Further, note that for any and , we have
By [3, Theorem 1], if there exists such that , then the plant (22) is UC.
Furthermore, the condition also ensures that the plant satisfies (20) in Corollary 12. Finally, applying Corollary 12 shows that the closed-loop system (18) is UISC.
Example 13
Choose and , then and the linear matrix inequalities (21) hold for . Hence, the closed-loop system (18) is UISC. The UISC property ensures that all solutions of the controlled plant to an input asymptotically converge to the reference state solution , independent of initial condition ; see Fig. 3.

IV-B Interconnected RCs for system identification
Nonlinear closed-loop model structures for black-box system identification, such as the Wiener-Hammerstein feedback models, have been proposed to better capture nonlinear feedback phenomena of the unknown system [40, 41]. Here we introduce interconnected RCs as candidate models. When identification is entirely based on the I/O data, the closed-loop RC is required to be UOC (or UC for state-feedback interconnections, see Sec IV-B1), so that the estimated outputs for large times are determined by the inputs but not by the RC’s initial condition. The internal RC parameters are arbitrary but fixed at the onset, as long as the closed-loop RC is UOC (or UC, see Sec. IV-B1). Only the RC’s output function is optimized to approximate the target output data.
Suppose that we have inputs and their corresponding outputs of the unknown system for , and . I/O data are for parameter estimation (using ) and model selection (using , based on Akaike’s final prediction error [46]). I/O data are for model evaluation. For each and , we first washout the effect of RC’s initial condition for . Let be the RC’s outputs under inputs , respectively. To optimize the RC output function, we minimize . We estimate the model order based on , computed as
where is the number of RC output parameters. For each , we randomly generate RCs and select a model out of models with the minimum . For each , the selected model is assessed using We employ interconnected ESNs and QRCs to emulate the feedback-controlled Lur’e system in Sec. IV-A. We set , , , and , with inputs and sampled uniformly over , independently for each (persistently exciting [46] with an order of estimated by the ‘pexcit’ Matlab command), whereas as in [47].
IV-B1 Echo-state networks (ESNs)
Consider state-feedback interconnected ESNs with subsystems of the form,
| (24) |
where , is the input and is applied to a vector elementwise. We choose an output , where and is a bias term. The output parameters are optimized via ordinary least squares. The UC property of each ESN is guaranteed by choosing and noticing its compact state-space [5, Theorem 13]. We apply Corollary 11 to establish the UISC property for the interconnected system (24). For any , let be any solutions to (24) under inputs and respectively. Let , and , then (17) in Corollary 11 is satisfied since
In Corollary 11, choose for some . The closed-loop system (24) is UISC if
| (25) |
Example 14
We consider interconnected ESN (24) with (i.e., ) to model the feedback-controlled Lur’e system in Sec. IV-A. For each ESN, elements of are sampled independently and uniformly over . We fix , , and scale so that (25) holds. The minimum FPE achieved is , with and . For this selected ESN, and (25) holds for . This results in and corresponding to the evaluation data , respectively. See Fig. 4 for the target outputs and the closed-loop ESN outputs .

IV-B2 Quantum reservoir computers (QRCs)
We consider RCs realized by quantum dynamical systems for system identification [22, 23, 25]. An -qubit quantum system is described by a positive semidefinite Hermitian matrix with trace . A matrix satisfying the above properties is referred to as a density operator. We consider quantum systems evolving according to , where is a completely positive trace-preserving (CPTP) map [48] determined by input . A CPTP map sends a density operator to another density operator. A natural norm choice for density operators is the Schatten 1-norm, defined as for any complex matrix and its conjugate transpose . We let be the operator norm induced by the Schatten 1-norm.
Consider an interconnected QRC (also see Fig. 5),
| (26) |
for . Here , and . Subsystem has qubits so that and are two density operators, with being fixed. Here, is the Pauli- operator acting on qubit , where Pauli- is a diagonal matrix with diagonal elements . For , the input-dependent CPTP maps are
where is the logistic function with a globally Lipschitz constant and are input-independent CPTP maps. We choose the output of the closed-loop QRC as
where ( and ) are the output parameters to be optimized via ordinary least squares.

Note that interconnected quantum systems do not generally take the form (6); see [49], [50], [51] and [52, Chapter 5]. System (26) can describe ensembles of identical quantum systems such as NMR ensembles [22], and quantum systems that can emulate such ensembles; e.g., [25, 53]. Such quantum systems have dynamics constrained by quantum mechanics, but can otherwise be viewed as deterministic systems. Since the quantum subsystems here do not interact quantum mechanically, the composite state for (26) can be described by the direct sum of the subsystem density operators, , as for interconnected classical systems. Consequently, the closed-loop system (26) is of the form (6) and Theorem 5 is applicable. We remark that Theorem 5 and its subsequent corollaries also hold for the Schatten 1-norm.
We now employ Corollary 10 to establish the UIOC of system (26). Note that for any density operators and any CPTP map , [48]. For any with , let be any solutions to inputs and , respectively. Let , and , we have
| (27) |
Furthermore, let be the outputs associated to . Applying Lemma 19 in Appendix D gives
| (28) |
To show that each QRC subsystem is UOC, note that a quantum system admits a compact state-space. Consider . From (27), we have with . By [5, Theorem 13], there exists a unique bounded reference state solution to each subsystem in (26). From (27) and (28), we have , and hence UOC of each QRC subsystem.
Upper bounding for [54, Theorem 2.1] in (27). Equations (27), (28) show that (9), (15) in Corollary 10 hold. Choose for some in Corollary 10. From (27), (28), the closed-loop QRC (26) is UIOC if
| (29) |
Example 15
We consider an interconnected QRC (26) with (i.e., ) to model the feedback-controlled Lur’e system in Sec. IV-A. For each QRC, we fix and , such that (29) holds for all values of considered here. For , is chosen with its -th element and zero otherwise. Each input-independent CPTP map is governed by a unitary matrix , defined by for and . More explicitly, we choose , where denotes the tensor (Kronecker) product. Other unitaries are , where , is the Pauli- operator on qubit and the Pauli- operator is . Parameters are uniformly distributed on , independently for each and . The unitaries employed here are simple, more complex unitaries that entangle qubits within a QRC subsystem can also be used; see [22, 23, 25].
The minimum FPE is achieved at with and , and (29) holds for . This selected QRC achieves . See Fig. 6 for the QRC outputs against the target outputs for the evaluation data .

V Conclusion
We present a small-gain theorem for output-feedback interconnected systems to be uniformly input-to-output convergent systems, as a discrete-time counterpart of the continuous-time results in [55]. Our proof is based on a small-gain theorem for time-varying discrete-time systems in the input-to-output stability framework, also derived herein. The latter result bridges the gap between time-invariant and time-varying discrete-time small-gain theorems in the literature [33, 35].
Our small-gain theorems are applicable to important control problems, such as output regulation and tracking [7]. We demonstrate an application of our small-gain theorems to observer-based controller design, illustrated with systems subject to globally Lipschitz nonlinearities that are ubiquitous in mechanical and robotic applications. Detouring from conventional applications, we apply the uniform input-to-output convergence small-gain theorem to design parameters of interconnected reservoir computers for black-box system identification. We introduce interconnected echo-state networks and quantum reservoir computers as candidate models equipped with closed-loop structures and demonstrate numerically their efficacy in modeling a feedback-controlled system.
Appendix A
Lemma 16
Consider a well-posed system (6). Suppose that for , there exists , (independent of ) with for all such that,for some with , for any input , any and , and any ,
| (30) |
and
Then there exists such that, for all , ,
The main idea in the proof of Lemma 16 is to apply a continuous extension argument and [31, Lemma A.2] stated below in Lemma 17.
Lemma 17
Given and such that, (i) for all , implies ; (ii) for all , . Then there exists such that, for each and , there exists some such that .
Proof:
Fix . For any , define if and otherwise. From the assumption (30) in Lemma 16, we have that for some ,
| (31) |
Note the implicit dependence . We sample and hold the left points to extend to a piecewise continuous function . For any , define , where if and zero otherwise. For any , let . Since , we have and
| (32) |
For , let . Then and . From (31) and (32), we have that for all ,
| (33) |
To apply Lemma 17, we first show the following claims.
Claim (i): There exists such that for all and , we have .
Proof:
Note that . From (33), we have
Since for all , it follows that for any ,
| (34) |
Choose such that (e.g., ) gives the desired result. ∎
Claim (ii): For any , there exists such that for all , whenever .
Proof:
The proof uses (34) and proceeds as in [29, Lemma 2.1]. Let , if , then by (34), for all . Otherwise, since is strictly contractive, there exists such that the -times composition . For , let be the first time instance such that so that for . Define and . We will show by induction that for , .
Claim (i) establishes the case for (with ). Suppose the induction hypothesis holds for . For , we have and . From (33),
Claim (ii) follows from choosing . ∎
Let be given by Claim (ii). As in [31, Proposition 2.7], define . Then satisfies the conditions in Lemma 17. Fix (the case for is immediate), any and the set . By Claim (ii), for all . Let and be given by Lemma 17, such that . Then
-
•
If , then by Claim (i) we have .
-
•
If , then and .
Therefore, for all , . In particular, for all , . By definition of , we have the desired result. ∎
We now prove Theorem 8. The proof adapts [29, Theorem 2.1] to discrete-time systems of the form (6). We first show that and , then we apply Lemma 16 with to show that system (6) is UIOS.
Proof:
From (12), we have that for all and ,
Substituting , and the bound for into that of , we have
| (35) |
where the last inequality follows from . A symmetric argument shows that
| (36) |
Recall that for . From (35) and (36), . Substituting and in (13), it follows that . It remains to show that system (6) is UIOS.
Consider subsystem and (12). For any and , let be the initial time and . Then and
| (38) |
Consider subsystem and (12). Let be the initial time. For any , let . Then ,
| (39) |
Note that the right-hand side of the last inequality in (39) does not depend on . Now taking on both sides of (39) shows that
| (40) |
Upper bounding in (38) using (40) and upper bounding in (38) using (37), we have
| (41) |
Let , and . By a symmetric argument, we can define and analogously. Here, and for . Re-writing (41) in terms of and , we have
where for all by strict contractivity of and , and we have shown . Invoking Lemma 16 with , there exists such that for all and ,
Let , and . It follows that
for all with and any initial condition . ∎
Appendix B
Proof:
By [5, Remark 5], for any inputs , is the unique and bounded reference state solution, so that subsystem is UC. To show closed-loop UISC, let be any solution to inputs with initial condition . Equation (19) implies that for any gains ,
The above equation and (20) shows that (17) in Corollary 11 hold. We now show that (16) in Corollary 11 is satisfied and hence the closed-loop UISC of system (18). Observe that with for all . Let be arbitrary. The result follows from choosing . ∎
Appendix C
We show that if the linear matrix inequalities (21) are satisfied then (19) holds for the observer error dynamics.
Lemma 18
Proof:
Let . Recall that for any ,
| (43) |
Let and , (43) is the same as , that is,
| (44) |
Let . Eq. (19) holds if there exists such that [56, Theorem 1.4], i.e.,
| (45) |
From (44), (45) holds if there exists such that
| (46) |
Assuming that and , we claim that (46) is equivalent to
| (47) |
To see this, under the assumptions and , the Schur complement shows that (46) is equivalent to . The same condition is obtained by applying the Schur complement twice to (47). ∎
Appendix D
Lemma 19
For any Hermitian matrices and , we have .
Proof:
Let be the spectral decomposition of , where forms an orthonormal basis for , where is the adjoint. Let be the standard basis for . Then there exists a unitary matrix such that for . Therefore,
where is the -th element of a matrix . For any Hermitian matrix , by the min-max theorem, we have Therefore, . By unitary invariance of singular values, . ∎
References
- [1] D. Angeli, “A Lyapunov approach to incremental stability properties,” IEEE Transactions on Automatic Control, vol. 47, no. 3, pp. 410–421, 2002.
- [2] A. Pavlov, N. Van De Wouw, and H. Nijmeijer, “Convergent systems: analysis and synthesis,” in Control and observer design for nonlinear finite and infinite dimensional systems. Springer, 2005, pp. 131–146.
- [3] A. Pavlov and N. van de Wouw, “Convergent discrete-time nonlinear systems: the case of PWA systems,” in 2008 American Control Conference. IEEE, 2008, pp. 3452–3457.
- [4] W. Lohmiller and J.-J. E. Slotine, “On contraction analysis for non-linear systems,” Automatica, vol. 34, no. 6, pp. 683–696, 1998.
- [5] D. N. Tran, B. S. Rüffer, and C. M. Kellett, “Convergence properties for discrete-time nonlinear systems,” IEEE Transactions on Automatic Control, vol. 64, no. 8, pp. 3415–3422, 2018.
- [6] A. Pavlov and N. van de Wouw, “Steady-state analysis and regulation of discrete-time nonlinear systems,” IEEE transactions on automatic control, vol. 57, no. 7, pp. 1793–1798, 2011.
- [7] A. Pavlov, N. van de Wouw, and H. Nijmeijer, Uniform Output Regulation of Nonlinear Systems: A Convergent Dynamics Approach, ser. Systems & Control: Foundations & Applications. Birkhäuser Boston, 2006.
- [8] Q.-C. Pham and J.-J. Slotine, “Stable concurrent synchronization in dynamic system networks,” Neural networks, vol. 20, no. 1, pp. 62–77, 2007.
- [9] G. Tanaka et al., “Recent advances in physical reservoir computing: A review,” Neural Networks, 2019.
- [10] K. Nakajima and I. Fischer, Reservoir Computing: Theory, Physical Implementations, and Applications. Springer Singapore, 2020.
- [11] L. Grigoryeva and J.-P. Ortega, “Universal discrete-time reservoir computers with stochastic inputs and linear readouts using non-homogeneous state-affine systems,” The Journal of Machine Learning Research, vol. 19, no. 1, pp. 892–931, 2018.
- [12] H. Jaeger and H. Haas, “Harnessing nonlinearity: Predicting chaotic systems and saving energy in wireless communication,” Science, vol. 304, no. 5667, pp. 78–80, 2004.
- [13] J. Pathak et al., “Model-free prediction of large spatiotemporally chaotic systems from data: A reservoir computing approach,” Physical review letters, vol. 120, no. 2, p. 024102, 2018.
- [14] L. Larger, A. Baylón-Fuentes, R. Martinenghi, V. S. Udaltsov, Y. K. Chembo, and M. Jacquot, “High-speed photonic reservoir computing using a time-delay-based architecture: Million words per second classification,” Physical Review X, vol. 7, no. 1, p. 011015, 2017.
- [15] D. Canaday, A. Griffith, and D. J. Gauthier, “Rapid time series prediction with a hardware-based reservoir computer,” Chaos: An Interdisciplinary Journal of Nonlinear Science, vol. 28, no. 12, p. 123119, 2018.
- [16] P. Zhou, N. R. McDonald, A. J. Edwards, L. Loomis, C. D. Thiem, and J. S. Friedman, “Reservoir computing with planar nanomagnet arrays,” arXiv preprint arXiv:2003.10948, 2020.
- [17] F. Galán-Prado, J. Font-Rosselló, and J. L. Rosselló, “Tropical reservoir computing hardware,” IEEE Transactions on Circuits and Systems II: Express Briefs, 2020.
- [18] M. C. Soriano, P. Massuti-Ballester, J. Yelo, and I. Fischer, “Optoelectronic reservoir computing using a mixed digital-analog hardware implementation,” in International Conference on Artificial Neural Networks. Springer, 2019, pp. 170–174.
- [19] K. Nakajima, “Physical reservoir computing—an introductory perspective,” Japanese Journal of Applied Physics, vol. 59, no. 6, p. 060501, 2020.
- [20] J. Preskill, “Quantum Computing in the NISQ era and beyond,” Quantum, vol. 2, p. 79, 2018.
- [21] IBM Quantum Experience. https://www.ibm.com/quantum-computing/.
- [22] K. Fujii and K. Nakajima, “Harnessing disordered-ensemble quantum dynamics for machine learning,” Physical Review Applied, vol. 8, no. 2, p. 024030, 2017.
- [23] J. Chen and H. I. Nurdin, “Learning nonlinear input–output maps with dissipative quantum systems,” Quantum Information Processing, vol. 18, no. 7, p. 198, 2019.
- [24] J. Chen, H. I. Nurdin, and N. Yamamoto, “Single-input single-output nonlinear system identification and signal processing on near-term quantum computers,” in Proceedings of the 2019 IEEE Conference on Decision and Control (CDC), December 2019, pp. 401–406.
- [25] ——, “Temporal information processing on noisy quantum computers,” Phys. Rev. Applied, vol. 14, p. 024065, Aug 2020.
- [26] J. S. Shamma and R. Zhao, “Fading-memory feedback systems and robust stability,” Automatica, vol. 29, no. 1, pp. 191–200, 1993.
- [27] Z. P. Jiang and I. Mareels, “A small-gain control method for nonlinear cascaded systems with dynamic uncertainties,” IEEE Transactions on Automatic Control, vol. 42, no. 3, pp. 292–308, 1997.
- [28] Z. P. Jiang, A. R. Teel, and L. Praly, “Small-gain theorem for ISS systems and applications,” Mathematics of Control, Signals and Systems, vol. 7, no. 2, pp. 95–120, 1994.
- [29] Z. Chen and J. Huang, “A simplified small gain theorem for time-varying nonlinear systems,” IEEE Transactions on Automatic Control, vol. 50, no. 11, pp. 1904–1908, 2005.
- [30] M. Zhu and J. Huang, “Small gain theorem with restrictions for uncertain time-varying nonlinear systems,” Communications in Information & Systems, vol. 6, no. 2, pp. 115–136, 2006.
- [31] E. D. Sontag and B. Ingalls, “A small-gain theorem with applications to input/output systems, incremental stability, detectability, and interconnections,” Journal of the Franklin Institute, vol. 339, no. 2, pp. 211–229, 2002.
- [32] Z. P. Jiang, Y. Lin, and Y. Wang, “Nonlinear small-gain theorems for discrete-time feedback systems and applications,” Automatica, vol. 40, no. 12, pp. 2129–2136, 2004.
- [33] Z. P. Jiang and Y. Wang, “Input-to-state stability for discrete-time nonlinear systems,” Automatica, vol. 37, no. 6, pp. 857–869, 2001.
- [34] E. D. S. Y. Lin and Y. Wang, “Recent results on lyapunov theoretic techniques for nonlinear stability,” Tech. Rep. SYCON-93-09.
- [35] Z. P. Jiang, Y. Lin, and Y. Wang, “Remarks on input-to-output stability for discrete time systems,” IFAC Proceedings Volumes, vol. 38, no. 1, pp. 306–311, 2005.
- [36] S. Ibrir, W. F. Xie, and C.-Y. Su, “Observer-based control of discrete-time Lipschitzian non-linear systems: application to one-link flexible joint robot,” International Journal of Control, vol. 78, no. 6, pp. 385–395, 2005.
- [37] S. Ibrir and S. Diopt, “Novel LMI conditions for observer-based stabilization of Lipschitzian nonlinear systems and uncertain linear systems in discrete-time,” Applied Mathematics and Computation, vol. 206, no. 2, pp. 579–588, 2008.
- [38] T. A. Johansen and B. A. Foss, “Constructing NARMAX models using ARMAX models,” International journal of control, vol. 58, no. 5, pp. 1125–1153, 1993.
- [39] S. Boyd and L. Chua, “Fading memory and the problem of approximating nonlinear operators with Volterra series,” IEEE Transactions on circuits and systems, vol. 32, no. 11, pp. 1150–1161, 1985.
- [40] F. Giri and E. Bai, Block-oriented Nonlinear System Identification, ser. Lecture Notes in Control and Information Sciences. Springer London, 2010.
- [41] M. Schoukens and K. Tiels, “Identification of block-oriented nonlinear systems starting from linear approximations: A survey,” Automatica, vol. 85, pp. 272–292, 2017.
- [42] Y. Lin, E. D. Sontag, and Y. Wang, “A smooth converse Lyapunov theorem for robust stability,” SIAM Journal on Control and Optimization, vol. 34, no. 1, pp. 124–160, 1996.
- [43] A. Isidori, Lectures in feedback design for multivariable systems. Springer, 2017, vol. 3.
- [44] E. Kreyszig, Introductory functional analysis with applications. John Wiley & Sons, 1978.
- [45] S. Ibrir, “Circle-criterion approach to discrete-time nonlinear observer design,” Automatica, vol. 43, no. 8, pp. 1432–1441, 2007.
- [46] L. Ljung, System Identification: Theory for the User. Pearson Education, 1998.
- [47] S. N. Kumpati and P. Kannan, “Identification and control of dynamical systems using neural networks,” IEEE Transactions on neural networks, vol. 1, no. 1, pp. 4–27, 1990.
- [48] M. Nielsen and I. Chuang, Quantum Computation and Quantum Information: 10th Anniversary Edition. Cambridge University Press, 2010.
- [49] H. I. Nurdin, M. R. James, and I. R. Petersen, “Coherent quantum LQG control,” Automatica, vol. 45, no. 8, pp. 1837–1846, 2009.
- [50] H. Amini, R. A. Somaraju, I. Dotsenko, C. Sayrin, M. Mirrahimi, and P. Rouchon, “Feedback stabilization of discrete-time quantum systems subject to non-demolition measurements with imperfections and delays,” Automatica, vol. 49, no. 9, pp. 2683–2692, 2013.
- [51] J. Combes, J. Kerckhoff, and M. Sarovar, “The SLH framework for modeling quantum input-output networks,” Adv. Phys. X, vol. 2, no. 784, 2017.
- [52] H. I. Nurdin and N. Yamamoto, Linear Dynamical Quantum Systems: Analysis, Synthesis, and Control, ser. Communications and Control Engineering. Springer, 2017.
- [53] M. Mirrahimi and P. Rouchon, “Singular perturbations and Lindblad-Kossakowski differential equations,” IEEE Transactions Automat. Control, vol. 54, no. 6, pp. 1325–1329, 2009.
- [54] D. Perez-Garcia, M. M. Wolf, D. Petz, and M. B. Ruskai, “Contractivity of positive and trace-preserving maps under norms,” Journal of Mathematical Physics, vol. 47, no. 8, p. 083506, 2006.
- [55] B. Besselink, N. van de Wouw, and H. Nijmeijer, “Model reduction for a class of convergent nonlinear systems,” IEEE transactions on automatic control, vol. 57, no. 4, pp. 1071–1076, 2011.
- [56] N. Bof, R. Carli, and L. Schenato, “Lyapunov theory for discrete time systems,” arXiv preprint arXiv:1809.05289, 2018.