An Asynchronous Parallel Stochastic Coordinate Descent Algorithm
\nameJi Liu \emailji.liu.uwisc@gmail.com
\nameStephen J. Wright \emailswright@cs.wisc.edu
\addrDepartment of Computer Sciences, University of Wisconsin-Madison, Madison, WI 53706
\nameChristopher Ré \emailchrismre@cs.stanford.edu
\addrDepartment of Computer Science, Stanford University, Stanford, CA 94305
\nameVictor Bittorf \emailvictor.bittorf@cloudera.com
\addrCloudera, Inc., Palo Alto, CA 94304
\nameSrikrishna Sridhar \emailsrikris@graphlab.com
\addrGraphLab Inc., Seattle, WA 98103
Abstract
We describe an asynchronous parallel stochastic coordinate descent
algorithm for minimizing smooth unconstrained or separably constrained
functions. The method achieves a linear convergence rate on functions
that satisfy an essential strong convexity property and a sublinear
rate () on general convex functions. Near-linear speedup on a
multicore system can be expected if the number of processors is
in unconstrained optimization and in the
separable-constrained case, where is the number of variables. We
describe results from implementation on 40-core processors.
where is a closed convex set and
is a smooth convex mapping from an open neighborhood of to
. We consider two particular cases of in this
paper: the unconstrained case , and the
separable case
(2)
where each , is a closed subinterval of the
real line.
Formulations of the type (1,2) arise in
many data analysis and machine learning problems, for example, support
vector machines (linear or nonlinear dual formulation)
(Cortes and Vapnik, 1995), LASSO (after decomposing into positive and
negative parts) (Tibshirani, 1996), and logistic
regression. Algorithms based on gradient and approximate or partial
gradient information have proved effective in these settings. We
mention in particular gradient projection and its accelerated variants
(Nesterov, 2004), accelerated proximal gradient
methods for regularized objectives (Beck and Teboulle, 2009), and stochastic
gradient methods (Nemirovski et al., 2009; Shamir and Zhang, 2013). These methods
are inherently serial, in that each iteration depends on the result of
the previous iteration. Recently, parallel multicore versions of
stochastic gradient and stochastic coordinate descent have been
described for problems involving large data sets; see for example
Niu et al. (2011); Richtárik and Takáč (2012b); Avron et al. (2014).
This paper proposes an asynchronous stochastic coordinate descent
(AsySCD) algorithm for convex optimization. Each step of AsySCD
chooses an index and subtracts a short,
constant, positive multiple of the th partial gradient from the th component of
. When separable constraints (2) are present, the update
is “clipped” to maintain feasibility with respect to
. Updates take place in parallel across the cores of a
multicore system, without any attempt to synchronize computation
between cores.
We assume that there is a bound on the age of the updates, that
is, no more than updates to occur between the time at which
a processor reads (and uses it to evaluate one element of the
gradient) and the time at which this processor makes its update to a
single element of . (A similar model of parallel asynchronous
computation was used in Hogwild! (Niu et al., 2011).) Our
implementation, described in Section 6, is a little more
complex than this simple model would suggest, as it is tailored to the
architecture of the Intel Xeon machine that we use for experiments.
We show that linear convergence can be attained if an “essential
strong convexity” property (3) holds, while sublinear
convergence at a “” rate can be proved for general convex
functions. Our analysis also defines a sufficient condition for
near-linear speedup in the number of cores used. This condition
relates the value of delay parameter (which relates to the
number of cores / threads used in the computation) to the problem
dimension . A parameter that quantifies the cross-coordinate
interactions in also appears in this relationship. When the
Hessian of is nearly diagonal, the minimization problem can almost
be separated along the coordinate axes, so higher degrees of
parallelism are possible.
We review related work in
Section 2. Section 3 specifies the
proposed algorithm. Convergence results for unconstrained and
constrained cases are described in Sections 4
and 5, respectively, with proofs given in the
appendix. Computational experience is reported in
Section 6. We discuss several variants of AsySCD in
Section 7. Some conclusions are given in
Section 8.
Notation and Assumption
We use the following notation.
•
denotes the th natural basis vector with the ‘”” in the th position.
•
denotes the Euclidean norm .
•
denotes the set on which attains its
optimal value, which is denoted by .
•
and denote Euclidean projection onto
and , respectively.
•
We use for the th element of , and
for the th element of the gradient vector .
•
We define the following essential strong convexity
condition for a convex function with respect to the optimal set
, with parameter :
(3)
This condition is significantly weaker than the usual strong convexity
condition, which requires the inequality to hold for all . In particular, it allows for non-singleton solution sets
, provided that increases at a uniformly quadratic rate with
distance from . (This property is noted for convex quadratic
in which the Hessian is rank deficient.) Other examples of
essentially strongly convex functions that are not strongly convex
include:
–
with arbitrary linear transformation , where
is strongly convex;
–
, for .
•
Define as the restricted Lipschitz constant for
, where the “restriction” is to the coordinate
directions: We have
•
Define as the coordinate Lipschitz constant for
in the th coordinate direction: We have
or equivalently
•
.
•
For the initial point , we define
(4)
Note that .
We use to denote the sequence of iterates
generated by the algorithm from starting point . Throughout the
paper, we assume that is nonempty.
Lipschitz Constants
The nonstandard Lipschitz constants , , and ,
defined above are crucial in the analysis of our
method. Besides bounding the nonlinearity of along various
directions, these quantities capture the interactions between the
various components in the gradient , as quantified in the
off-diagonal terms of the Hessian — although the
stated conditions do not require this matrix to exist.
We have noted already that . Let us consider upper
bounds on this ratio under certain conditions. When is twice
continuously differentiable, we have
Since for , we have that
Thus , which is a bound on the largest column norm for
over all , is bounded by , so that
If the Hessian is structurally sparse, having at most nonzeros per
row/column, the same argument leads to .
If is a convex quadratic with Hessian , we have
where denotes the th column of . If is
diagonally dominant, we have for any column that
which, by taking the maximum of both sides, implies that in this case.
Finally, consider the objective and assume
that is a random matrix whose entries are
i.i.d from . The diagonals of the Hessian are
(where is the th column
of ), which have expected value , so we can expect to be
not less than . Recalling that is the maximum column norm of
, we have
where the second inequality uses Jensen’s inequality
and the final equality uses
We can thus estimate the upper bound on roughly by for this case.
2 Related Work
This section reviews some related work on coordinate relaxation and
stochastic gradient algorithms.
Among cyclic coordinate descent algorithms, Tseng (2001)
proved the convergence of a block coordinate descent method for
nondifferentiable functions with certain conditions. Local and global
linear convergence were established under additional assumptions, by
Luo and Tseng (1992) and Wang and Lin (2014), respectively. Global linear
(sublinear) convergence rate for strongly (weakly) convex optimization
was proved by Beck and Tetruashvili (2013). Block-coordinate approaches based on
proximal-linear subproblems are described by
Tseng and Yun (2009, 2010). Wright (2012) uses acceleration on reduced
spaces (corresponding to the optimal manifold) to improve the local
convergence properties of this approach.
Stochastic coordinate descent is almost identical to cyclic
coordinate descent except selecting coordinates in a random
manner. Nesterov (2012) studied the convergence rate for a
stochastic block coordinate descent method for unconstrained and
separably constrained convex smooth optimization, proving linear
convergence for the strongly convex case and a sublinear rate
for the convex case. Extensions to minimization of composite functions
are described by Richtárik and Takáč (2012a) and Lu and Xiao (2013).
Synchronous parallel methods distribute the workload and data
among multiple processors, and coordinate the computation among
processors. Ferris and Mangasarian (1994) proposed to distribute variables among
multiple processors and optimize concurrently over each subset. The
synchronization step searches the affine hull formed by the current
iterate and the points found by each processor. Similar ideas appeared
in (Mangasarian, 1995), with a different synchronization
step. Goldfarb and Ma (2012) considered a multiple splitting algorithm for
functions of the form in which models
are optimized separately and concurrently, then combined in an
synchronization step. The alternating direction method-of-multiplier
(ADMM) framework (Boyd et al., 2011) can also be implemented in parallel.
This approach dissects the problem into multiple subproblems (possibly after
replication of primal variables) and optimizes concurrently, then
synchronizes to update multiplier estimates. Duchi et al. (2012) described
a subgradient dual-averaging algorithm for partially separable
objectives, with subgradient evaluations distributed between cores and
combined in ways that reflect the structure of the objective. Parallel
stochastic gradient approaches have received broad attention; see
Agarwal and Duchi (2011) for an approach that allows delays between
evaluation and update, and Cotter et al. (2011) for a minibatch stochastic
gradient approach with Nesterov
acceleration. Shalev-Shwartz and Zhang (2013) proposed an accelerated
stochastic dual coordinate ascent method.
Among synchronous parallel methods for (block) coordinate
descent, Richtárik and Takáč (2012b) described a method of this type
for convex composite optimization problems. All processors update
randomly selected coordinates or blocks, concurrently and
synchronously, at each iteration. Speedup depends on the sparsity of
the data matrix that defines the loss functions. Several variants
that select blocks greedily are considered by Scherrer et al. (2012)
and Peng et al. (2013). Yang (2013) studied the parallel stochastic dual
coordinate ascent method and emphasized the balance between
computation and communication.
We turn now to asynchronous parallel
methods. Bertsekas and Tsitsiklis (1989) introduced an asynchronous parallel
implementation for general fixed point problems over a
separable convex closed feasible region. (The optimization problem
(1) can be formulated in this way by defining
for some fixed
.) Their analysis allows inconsistent reads for , that
is, the coordinates of the read have different “ages.” Linear
convergence is established if all ages are bounded and
satisfies a diagonal dominance condition guaranteeing that the
iteration is a maximum-norm contraction mapping for
sufficient small . However, this condition is strong —
stronger, in fact, than the strong convexity condition. For convex
quadratic optimization , the contraction
condition requires diagonal dominance of the Hessian: for all . By comparison,
AsySCD guarantees linear convergence rate under the essential strong
convexity condition (3), though we do not allow
inconsistent read. (We require the vector used for each evaluation
of to have existed at a certain point in time.)
Hogwild! (Niu et al., 2011) is a lock-free, asynchronous parallel
implementation of a stochastic-gradient method, targeted to a
multicore computational model similar to the one considered here. Its
analysis assumes consistent reading of , and it is implemented
without locking or coordination between processors. Under certain
conditions, convergence of Hogwild! approximately matches the
sublinear rate of its serial counterpart, which is the
constant-steplength stochastic gradient method analyzed in
Nemirovski et al. (2009).
We also note recent work by Avron et al. (2014), who proposed an
asynchronous linear solver to solve where is a symmetric
positive definite matrix, proving a linear convergence rate. Both
inconsistent- and consistent-read cases are analyzed in this paper,
with the convergence result for inconsistent read being slightly
weaker.
The AsySCD algorithm described in this paper was extended to solve
the composite objective function consisting of a smooth convex
function plus a separable convex function in a later work
(Liu and Wright, 2014), which pays particular attention to the
inconsistent-read case.
3 Algorithm
In AsySCD, multiple processors have access to a shared data structure
for the vector , and each processor is able to compute a randomly
chosen element of the gradient vector . Each processor
repeatedly runs the following coordinate descent process (the
steplength parameter is discussed further in the next
section):
R:
Choose an index at random, read ,
and evaluate ;
U:
Update component of the shared by taking a step of
length in the direction .
Since these processors are being run concurrently and without
synchronization, may change between the time at which it is read
(in step R) and the time at which it is updated (step U). We capture
the system-wide behavior of AsySCD in Algorithm 1.
There is a global counter for the total number of updates;
denotes the state of after updates. The index denotes the component updated at step .
denotes the -iterate at which the update applied at iteration
was calculated. Obviously, we have , but we assume that
the delay between the time of evaluation and updating is bounded
uniformly by a positive integer , that is, for
all . The value of captures the essential parallelism in the
method, as it indicates the number of processors that are involved in
the computation.
The projection operation onto the feasible set is not
needed in the case of unconstrained optimization. For separable
constraints (2), it requires a simple clipping operation on
the component of .
We note several differences with earlier asynchronous approaches.
Unlike the asynchronous scheme in Bertsekas and Tsitsiklis (1989, Section 6.1),
the latest value of is updated at each step, not an earlier
iterate. Although our model of computation is similar to
Hogwild! (Niu et al., 2011), the algorithm differs in that each
iteration of AsySCD evaluates a single component of the gradient
exactly, while Hogwild! computes only a (usually crude) estimate of
the full gradient. Our analysis of AsySCD below is comprehensively
different from that of Niu et al. (2011), and we obtain stronger
convergence results.
4 Unconstrained Smooth Convex Case
This section presents results about convergence of AsySCD in the
unconstrained case . The theorem encompasses both the
linear rate for essentially strongly convex and the sublinear rate
for general convex . The result depends strongly on the delay
parameter . (Proofs of results in this section appear in
Appendix A.) In Algorithm 1, the indices
, are random variables. We denote the
expectation over all random variables as , the conditional
expectation in term of given as
.
A crucial issue in AsySCD is the choice of steplength parameter
. This choice involves a tradeoff: We would like to
be long enough that significant progress is made at each step, but not
so long that the gradient information computed at step is stale
and irrelevant by the time the update is applied at step . We
enforce this tradeoff by means of a bound on the ratio of expected
squared norms on at successive iterates; specifically,
(5)
where is a user defined parameter.
The analysis becomes a delicate balancing act in the choice of
and steplength between aggression and excessive
conservatism. We find, however, that these values can be chosen to
ensure steady convergence for the asynchronous method at a linear rate, with rate constants that are almost consistent with
vanilla short-step full-gradient descent.
We use the following assumption in some of the results of this
section.
Assumption 1
There is a real number such that
Note that this assumption is not needed in our convergence results in
the case of strongly convex functions. in our theorems below, it is
invoked only when considering general convex functions.
Theorem 1
Suppose that in (1). For any
, define the quantity as follows:
(6)
Suppose that the steplength parameter satisfies the following
three upper bounds:
(7a)
(7b)
(7c)
Then we have that for any that
(8)
Moreover, if the essentially strong convexity property (3)
holds with , we have
(9)
For general smooth convex functions , assuming additionally
that Assumption 1 holds, we have
(10)
This theorem demonstrates linear convergence (9) for
AsySCD in the unconstrained essentially strongly convex case. This
result is better than that obtained for
Hogwild! (Niu et al., 2011), which guarantees only sublinear
convergence under the stronger assumption of strict convexity.
The following corollary proposes an interesting particular choice of
the parameters for which the convergence expressions become more
comprehensible. The result requires a condition on the delay bound
in terms of and the ratio .
Corollary 2
Suppose that
(11)
Then if we choose
(12)
define by (6), and set ,
we have for the essentially
strongly convex case (3) with that
(13)
For the case of general convex , if we assume additionally
that Assumption 1 is satisfied, we have
(14)
We note that the linear rate (13) is broadly
consistent with the linear rate for the classical steepest descent
method applied to strongly convex functions, which has a rate constant
of , where is the standard Lipschitz constant for
. If we assume (not unreasonably) that steps of
stochastic coordinate descent cost roughly the same as one step of
steepest descent, and note from (13) that steps
of stochastic coordinate descent would achieve a reduction factor of
about , a standard argument would suggest that
stochastic coordinate descent would require about times
more computation. (Note that .)
The stochastic approach may gain an advantage from the parallel
implementation, however. Steepest descent requires
synchronization and careful division of gradient evaluations, whereas the
stochastic approach can be implemented in an asynchronous fashion.
For the general convex case, (14) defines a
sublinear rate, whose relationship with the rate of the steepest
descent for general convex optimization is similar to the previous
paragraph.
As noted in Section 1, the parameter is closely
related to the number of cores that can be involved in the
computation, without degrading the convergence performance of the
algorithm. In other words, if the number of cores is small enough such
that (11) holds, the convergence expressions
(13), (14) do not depend on the
number of cores, implying that linear speedup can be expected. A small
value for the ratio (not much greater than )
implies a greater degree of potential parallelism. As we note at the
end of Section 1, this ratio tends to be small in some
important applications — a situation that would allow
cores to be used with near-linear speedup.
We conclude this section with a high-probability estimate for
convergence of the sequence of function values.
Theorem 3
Suppose that the assumptions of Corollary 2 hold,
including the definitions of and . Then for any
and , we have that
(15)
provided that either of the following sufficient conditions hold for
the index . In the essentially strongly convex case (3)
with , it suffices to have
(16)
For the general convex case, if we assume additionally that
Assumption 1 holds, a sufficient condition is
(17)
5 Constrained Smooth Convex Case
This section considers the case of separable constraints
(2). We show results about convergence rates and
high-probability complexity estimates, analogous to those of the
previous section. Proofs appear in Appendix B.
As in the unconstrained case, the steplength should be chosen
to ensure steady progress while ensuring that update information does
not become too stale. Because constraints are present, the ratio
(5) is no longer appropriate. We use instead a ratio
of squares of expected differences in successive primal iterates:
(18)
where is the hypothesized full update obtained by
applying the single-component update to every component of
, that is,
(19)
In the unconstrained case , the ratio (18)
reduces to
which is evidently related to (5), but not identical.
We have the following result concerning convergence of the expected
error to zero.
Theorem 4
Suppose that has the form (2) and that . Let be a constant with
, and define the quantity
as follows:
(20)
Suppose that the steplength parameter satisfies the
following two upper bounds:
(21)
Then we have
(22)
If the essential strong convexity property (3)
holds with , we have for that
(23)
where is defined in (4).
For general smooth convex function , we have
(24)
Similarly to the unconstrained case, the following corollary proposes
an interesting particular choice for the parameters for which the
convergence expressions become more comprehensible. The result
requires a condition on the delay bound in terms of and the
ratio .
Corollary 5
Suppose that and and that
(25)
If we choose
(26)
then the steplength will satisfy the bounds
(21). In addition, for the essentially strongly
convex case (3) with , we have for that
(27)
while for the case of general convex , we have
(28)
Similarly to Section 4, and provided
satisfies (25), the convergence rate is not affected
appreciably by the delay bound , and near-linear speedup can
be expected for multicore implementations when (25)
holds. This condition is more restrictive than (11) in
the unconstrained case, but still holds in many problems for
interesting values of . When is bounded
independently of dimension, the maximal number of cores allowed is of
the the order of , which is smaller than the
value obtained for the unconstrained case.
We conclude this section with another high-probability bound, whose
proof tracks that of Theorem 3.
Theorem 6
Suppose that the conditions of Corollary 5 hold,
including the definitions of and . Then for
and , we have that
provided that one of the following conditions holds: In the
essentially strongly convex case (3) with , we require
while in the general convex case, it suffices that
6 Experiments
We illustrate the behavior of two variants of the stochastic
coordinate descent approach on test problems constructed from several
data sets. Our interests are in the efficiency of multicore
implementations (by comparison with a single-threaded implementation)
and in performance relative to alternative solvers for the same
problems.
All our test problems have the form (1), with
either or separable as in
(2). The objective is quadratic, that is,
with symmetric positive definite.
Our implementation of AsySCD is called DIMM-WITTED (or DW for
short). It runs on various numbers of threads, from 1 to 40, each
thread assigned to a single core in our 40-core Intel Xeon
architecture. Cores on the Xeon architecture are arranged into four
sockets — ten cores per socket, with each socket having its own
memory. Non-uniform memory access (NUMA) means that memory accesses to
local memory (on the same socket as the core) are less expensive than
accesses to memory on another socket. In our DW implementation, we
assign each socket an equal-sized “slice” of , a row
submatrix. The components of are partitioned between cores, each
core being responsible for updating its own partition of (though
it can read the components of from other cores). The components of
assigned to the cores correspond to the rows of assigned to
that core’s socket. Computation is grouped into “epochs,”
where an epoch is defined to be the period of computation during which
each component of is updated exactly once. We use the parameter
to denote the number of epochs that are executed between
reordering (shuffling) of the coordinates of . We investigate both
shuffling after every epoch () and after every tenth epoch
(). Access to is lock-free, and updates are performed
asynchronously. This update scheme does not implement exactly the
“sampling with replacement” scheme analyzed in previous sections,
but can be viewed as a high performance, practical adaptation of the
AsySCD method.
To do each coordinate descent update, a thread must read the latest
value of . Most components are already in the cache for that core,
so that it only needs to fetch those components recently changed. When
a thread writes to , the hardware ensures that this is
simultaneously removed from other cores, signaling that they must
fetch the updated version before proceeding with their respective
computations.
Although DW is not a precise implementation of AsySCD, it largely
achieves the consistent-read condition that is assumed by the
analysis. Inconsistent read happens on a core only if the following
three conditions are satisfied simultaneously:
•
A core does not finish reading recently changed coordinates of
(note that it needs to read no more than coordinates);
•
Among these recently changed coordinates, modifications take
place both to coordinates that have been read and that are
still to be read by this core;
•
Modification of the already-read coordinates happens earlier
than the modification of the still-unread coordinates.
Inconsistent read will occur only if at least two coordinates of
are modified twice during a stretch of approximately updates to
(that is, iterations of Algorithm 1). For the DW
implementation, inconsistent read would require repeated updating of a
particular component in a stretch of approximately iterations
that straddles two epochs. This event would be rare, for typical
values of and . Of course, one can avoid the inconsistent
read issue altogether by changing the shuffling rule slightly,
enforcing the requirement that no coordinate can be modified twice in
a span of iterations. From the practical perspective, this
change does not improve performance, and detracts from the simplicity
of the approach. From the theoretical perspective, however, the
analysis for the inconsistent-read model would be interesting and
meaningful, and we plan to study this topic in future work.
The first test problem QP is an unconstrained, regularized least
squares problem constructed with synthetic data. It has the form
(29)
All elements of , the true model
, and the observation noise vector
are generated in i.i.d. fashion from the Gaussian
distribution , following which each column in is
scaled to have a Euclidean norm of . The observation
is constructed from .
We choose ,
, and . We therefore have
and
With this estimate, the
condition (11) is satisfied when delay parameter
is less than about . In Algorithm 1, we set the
steplength parameter to , and we choose initial iterate to
be . We measure convergence of the residual norm .
Our second problem QPc is a bound-constrained version of
(29):
(30)
The methodology for generating and and for choosing
the values of , , , and is the same as for
(29). We measure convergence via the residual , where is the nonnegative orthant
. At the solution of (30), about half the
components of are at their lower bound of .
Our third and fourth problems are quadratic penalty functions
for linear programming relaxations of vertex cover problems on large
graphs. The vertex cover problem for an undirected graph with edge set and
vertex set can be written as a binary linear program:
By relaxing each binary constraint to the interval ,
introducing slack variables for the cover inequalities, we obtain a
problem of the form
This has the form
for . The test problem (31) is a regularized
quadratic penalty reformulation of this linear program for some
penalty parameter :
(31)
with . Two test data sets Amazon and DBLP have dimensions
and , respectively.
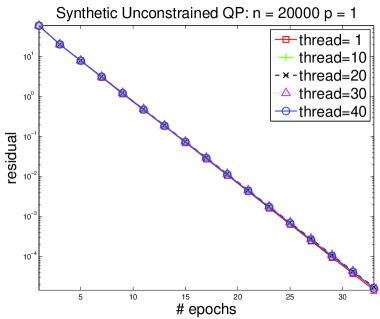
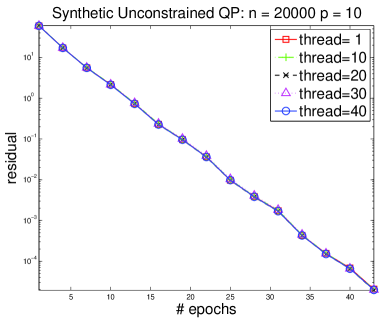
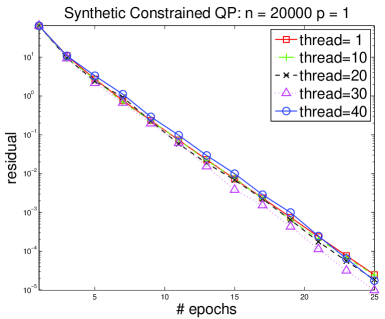
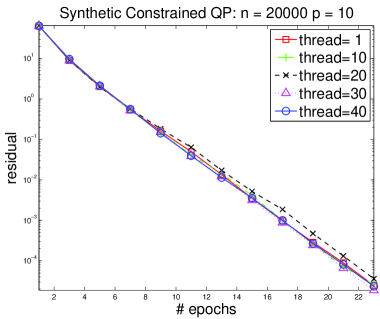
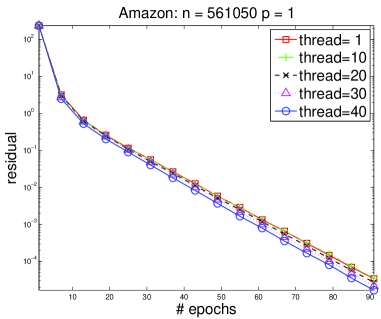
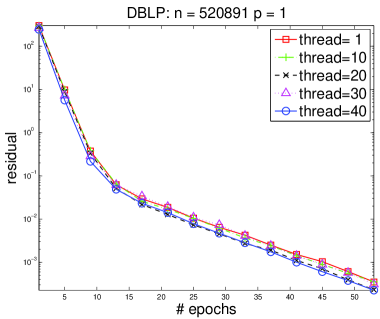
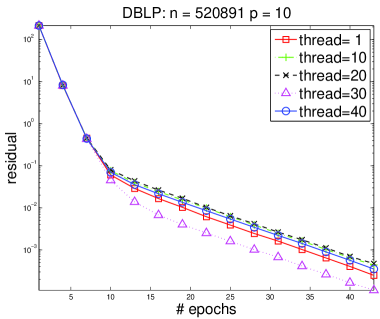
We tracked the behavior of the residual as a function of the number of
epochs, when executed on different numbers of
cores. Figure 1 shows convergence behavior for each of
our four test problems on various numbers of cores with two different
shuffling periods: and . We note the following points.
•
The total amount of computation to achieve any level of
precision appears to be almost independent of the number of cores,
at least up to 40 cores. In this respect, the performance of the
algorithm does not change appreciably as the number of cores is
increased. Thus, any deviation from linear speedup is due not to
degradation of convergence speed in the algorithm but rather to
systems issues in the implementation.
•
When we reshuffle after every epoch (), convergence is
slightly faster in synthetic unconstrained QP but slightly
slower in Amazon and DBLP than when we do occasional
reshuffling (). Overall, the convergence rates with different
shuffling periods are comparable in the sense of epochs. However,
when the dimension of the variable is large, the shuffling operation
becomes expensive, so we would recommend using a large value for
for large-dimensional problems.
Figure 1: Residuals vs epoch number for the four test problems. Results
are reported for variants in which indices are reshuffled after
every epoch () and after every tenth epoch ().
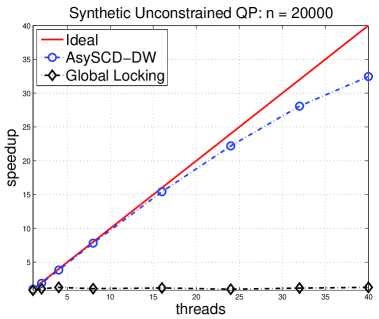
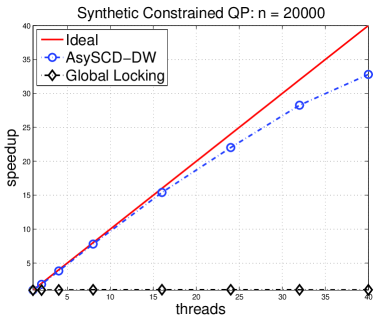
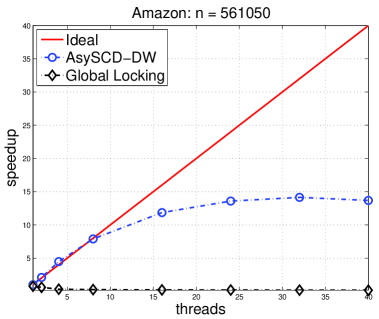
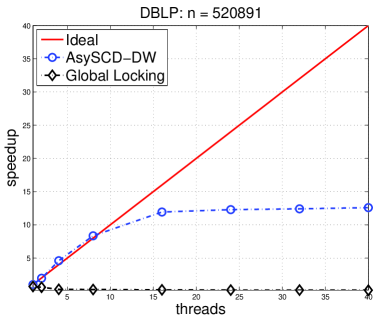
Results for speedup on multicore implementations are shown in
Figures 2 and 3 for DW with
. Speedup is defined as follows:
Near-linear speedup can be observed for the two QP problems with
synthetic data. For Problems 3 and 4, speedup is at most 12-14; there
are few gains when the number of cores exceeds about 12.
We believe that the degradation is due mostly to memory
contention. Although these problems have high dimension, the matrix
is very sparse (in contrast to the dense for the synthetic
data set). Thus, the ratio of computation to data movement / memory
access is much lower for these problems, making memory contention
effects more significant.
Figures 2 and 3 also show results
of a global-locking strategy for the parallel stochastic coordinate
descent method, in which the vector is locked by a core whenever
it performs a read or update. The performance curve for this strategy
hugs the horizontal axis; it is not competitive.
Wall clock times required for the four test problems on and
cores, to reduce residuals below are shown in
Table 1. (Similar speedups are noted when we use a
convergence tolerance looser than .)
Figure 2: Test problems 1 and 2: Speedup of multicore
implementations of DW on up to 40 cores of an Intel Xeon
architecture. Ideal (linear) speedup curve is shown for
reference, along with poor speedups obtained for a
global-locking strategy.
Figure 3: Test problems 3 and 4: Speedup of multicore implementations
of DW on up to 40 cores of an Intel Xeon architecture. Ideal
(linear) speedup curve is shown for reference, along with poor
speedups obtained for a global-locking strategy.
Problem
1 core
40 cores
QP
98.4
3.03
QPc
59.7
1.82
Amazon
17.1
1.25
DBLP
11.5
.91
Table 1: Runtimes (seconds) for the four test problems on and cores.
#cores
Time(sec)
Speedup
1
55.9
1
10
5.19
10.8
20
2.77
20.2
30
2.06
27.2
40
1.81
30.9
Table 2: Runtimes (seconds) and speedup for multicore implementations
of DW on different number of cores for the weakly convex
QPc problem (with ) to achieve a residual below
.
#cores
Time(sec)
Speedup
SynGD / AsySCD
SynGD / AsySCD
1
96.8 / 27.1
0.28 / 1.00
10
11.4 / 2.57
2.38 / 10.5
20
6.00 / 1.36
4.51 / 19.9
30
4.44 / 1.01
6.10 / 26.8
40
3.91 / 0.88
6.93 / 30.8
Table 3: Efficiency comparison between SynGD and AsySCD for the
QP problem. The running time and speedup are based on the
residual achieving a tolerance of .
Dataset
# of
# of
Train time(sec)
Samples
Features
LIBSVM
AsySCD
adult
32561
123
16.15
1.39
news
19996
1355191
214.48
7.22
rcv
20242
47236
40.33
16.06
reuters
8293
18930
1.63
0.81
w8a
49749
300
33.62
5.86
Table 4: Efficiency comparison between LIBSVM and AsySCD for kernel
SVM using 40 cores using homogeneous kernels (). The running time and speedup are
calculated based on the “residual” . Here, to make both
algorithms comparable, the “residual” is defined by
.
All problems reported on above are essentially strongly convex. Similar speedup properties can be obtained in the weakly convex case as well. We show speedups for the QPc problem with . Table 2 demonstrates similar speedup to the essentially strongly convex case shown in Figure 2.
Turning now to comparisons between AsySCD and alternative algorithms,
we start by considering the basic gradient descent method. We
implement gradient descent in a parallel, synchronous fashion,
distributing the gradient computation load on multiple cores and
updating the variable in parallel at each step. The resulting
implementation is called SynGD. Table 3 reports
running time and speedup of both AsySCD over SynGD, showing a
clear advantage for AsySCD. A high price is paid for the
synchronization requirement in SynGD.
Next we compare AsySCD to LIBSVM (Chang and Lin, 2011) a popular multi-thread parallel solver for kernel support vector machines (SVM). Both algorithms are run on 40 cores to solve the dual formulation of kernel SVM, without an intercept term. All data sets used in 4 except reuters were obtained from the LIBSVM dataset repository111http://www.csie.ntu.edu.tw/~cjlin/libsvmtools/datasets/. The dataset reuters is a sparse binary text classification dataset constructed as a one-versus-all version of Reuters-2159222http://www.daviddlewis.com/resources/testcollections/reuters21578/. Our comparisons, shown in Table 4, indicate that AsySCD outperforms LIBSVM on these test sets.
7 Extension
The AsySCD algorithm can be extended by partitioning the coordinates
into blocks, and modifying Algorithm 1 to work with these
blocks rather than with single coordinates. If , , and
are defined in the block sense, as follows:
where is the projection from the th block to and
denotes the number of components in block , our analysis can be
extended appropriately.
To make the AsySCD algorithm more efficient, one can redefine the
steplength in Algorithm 1 to be
rather than . Our analysis can be applied to
this variant by doing a change of variables to , with
and defining , ,
and in terms of .
8 Conclusion
This paper proposes an asynchronous parallel stochastic coordinate
descent algorithm for minimizing convex objectives, in the
unconstrained and separable-constrained cases. Sublinear convergence
(at rate ) is proved for general convex functions, with stronger
linear convergence results for functions that satisfy an essential
strong convexity property. Our analysis indicates the extent to which
parallel implementations can be expected to yield near-linear speedup,
in terms of a parameter that quantifies the cross-coordinate
interactions in the gradient and a parameter that
bounds the delay in updating. Our computational experience confirms
the theory.
Acknowledgments
This project is supported by NSF Grants DMS-0914524,
DMS-1216318, and CCF-1356918; NSF CAREER Award IIS-1353606; ONR
Awards N00014-13-1-0129 and N00014-12-1-0041; AFOSR Award
FA9550-13-1-0138; a Sloan Research Fellowship; and grants from
Oracle, Google, and ExxonMobil.
A Proofs for Unconstrained Case
This section contains convergence proofs for AsySCD in the
unconstrained case.
We start with a technical result, then move to the proofs of the three
main results of Section 4.
Lemma 7
For any , we have
If the essential strong convexity property (3) holds, we have
Proof
The first inequality is proved as follows:
For the second bound, we have from the definition (3),
setting and , that
as required.
Proof (Theorem 1)
We prove each of the two inequalities in (8) by
induction. We start with the left-hand inequality. For all values of
, we have
(32)
We can use this bound to show that the left-hand inequality in
(8) holds for . By setting in
(32) and noting that , we obtain
where the second inequality follows from . By substituting into
(33), we obtain , establishing the result for . For
the inductive step, we use (32) again, assuming
that the left-hand inequality in (8) holds up to stage
, and thus that
provided that , as assumed. By substituting into
the right-hand side of (32) again, and using
, we obtain
By substituting
(7b)
we conclude that the left-hand inequality in
(8) holds for all .
We now work on the right-hand inequality in (8). For
all , we have the following:
(34)
where the last inequality is from the observation .
By setting in this bound, and noting that , we obtain
where the last inequality follows from . By substituting into
(35), we obtain , so the right-hand bound in (8)
is established for . For the inductive step, we use
(34) again, assuming that the right-hand inequality
in (8) holds up to stage , and thus that
provided that , as assumed. From
(34) and the left-hand inequality in (8), we have by substituting this bound that
(36)
It follows immediately from
(7c)
that the term in parentheses in (36)
is bounded above by . By substituting this bound into
(36), we obtain , as required.
At this point, we have shown that both inequalities in
(8) are satisfied for all .
Next we prove (9) and (10). Take the
expectation of in terms of :
(37)
The second term is caused by delay. If there is no delay, should be because of . We estimate the upper bound of :
(38)
Then can be bounded by
(39)
where the second line uses (38), and the final
inequality uses the fact for between and , lies
in the range and , so we have
for all .
Taking expectation on both sides of (37) in terms
of all random variables, together with (39), we
obtain
(40)
which (because of
(7a)) implies that is
monotonically decreasing.
Assume now that the essential strong convexity property (3)
holds. From Lemma 7 and the fact that is
monotonically decreasing, we have
We show now that the steplength parameter choice
satisfies all the bounds in (7), by showing that the
second and third bounds are implied by the first. For
the second bound (7b), we have
where the second inequality follows from (12). To
verify that the right hand side of the third bound
(7c) is greater than , we consider the
cases and separately. For , we have
from (6) and
where the first inequality is from (11). For the other
case , we have
We can thus set , and by substituting this choice into
(9) and using (41), we obtain
(13). We obtain (14) by making
the same substitution into (10).
Proof (Theorem 3)
From Markov’s inequality, we have
where the second inequality applies (13), the third
inequality uses the definition of (16), and the
second last inequality uses the inequality , which proves the essentially strongly
convex case. Similarly, the general convex case is proven by
where the second inequality uses (14) and the last inequality uses the definition of (17).
B Proofs for Constrained Case
We start by introducing notation and proving several preliminary
results. Define
(42)
and formulate the update in Step 4 of
Algorithm 1 in the following way:
(Note that for .) The
optimality condition for
this formulation is
This implies in particular that for all , we have
(43)
From the definition of , and using the notation
(42), we have
which indicates that
(44)
From optimality conditions for the problem (19), which defines
the vector , we have
(45)
We now define , and note that this
definition is consistent with defined
in (42). It can be seen that
We now proceed to prove the main results of
Section 5.
Proof (Theorem 4)
We prove (22) by induction. First, note that for any
vectors and , we have
Thus for all , we have
(46)
The second factor in the r.h.s. of (46) is bounded as follows:
(47)
where the first inequality follows by adding and subtracting a term,
and the second inequality uses the nonexpansive property of projection:
One can see that and , which implies that for each
index in the summation in (47). It also follows that
(48)
We set , and note that and . Thus, in this
case, we have that the lower and upper limits of the summation in
(47) are and , respectively. Thus, this
summation is vacuous, and we have
By substituting this bound in (46) and setting ,
we obtain
By taking the expectation on both sides of (56), using
,
and substituting the upper bounds from (57) and
(58), we obtain
(59)
In the second inequality, we were able to drop the term involving by using the fact that
which follows from the definition (20) of and
from the first upper bound on in (21). It
follows that
(60)
where the second inequality follows by applying induction to the
inequality
where
and the last line uses the monotonicity of (proved
above) and the definition . It implies that
This completes the proof of the sublinear convergence rate (24).
Finally, we prove the linear convergence rate (23) for
the essentially strongly convex case. All bounds proven above hold,
and we make use of the following additional property:
due to feasibility of and . By using this result together with some
elementary manipulation, we obtain
(The second last inequality uses and .)
Thus, the steplength parameter choice satisfies the first
bound in (21). To show that the second bound in
(21) holds also, we have
We can thus set , and by substituting this choice
into (23), we obtain (27). We
obtain (28) by making the same substitution
into (24).
Avron et al. [2014]
H. Avron, A. Druinsky, and A. Gupta.
Revisiting asynchronous linear solvers: Provable convergence rate
through randomization.
IPDPS, 2014.
Beck and Teboulle [2009]
A. Beck and M. Teboulle.
A fast iterative shrinkage-thresholding algorithm for linear inverse
problems.
SIAM J. Imaging Sciences, 2(1):183–202,
2009.
Beck and Tetruashvili [2013]
A. Beck and L. Tetruashvili.
On the convergence of block coordinate descent type methods.
SIAM Journal on Optimization, 23(4):2037–2060, 2013.
Bertsekas and Tsitsiklis [1989]
D. P. Bertsekas and J. N. Tsitsiklis.
Parallel and Distributed Computation: Numerical Methods.
Pentice Hall, 1989.
Boyd et al. [2011]
S. Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein.
Distributed optimization and statistical learning via the alternating
direction method of multipliers.
Foundations and Trends in Machine Learning, 3(1):1–122, 2011.
Duchi et al. [2012]
J. C. Duchi, A. Agarwal, and M. J. Wainwright.
Dual averaging for distributed optimization: Convergence analysis and
network scaling.
IEEE Transactions on Automatic Control, 57(3):592–606, 2012.
Ferris and Mangasarian [1994]
M. C. Ferris and O. L. Mangasarian.
Parallel variable distribution.
SIAM Journal on Optimization, 4(4):815–832, 1994.
Goldfarb and Ma [2012]
D. Goldfarb and S. Ma.
Fast multiple-splitting algorithms for convex optimization.
SIAM Journal on Optimization, 22(2):533–556, 2012.
Liu and Wright [2014]
J. Liu and S. J. Wright.
Asynchronous stochastic coordinate descent: Parallelism and
convergence properties.
Technical Report arXiv:1403.3862, 2014.
Lu and Xiao [2013]
Z. Lu and L. Xiao.
On the complexity analysis of randomized block-coordinate descent
methods.
Technical Report arXiv:1305.4723, Simon Fraser University, 2013.
Luo and Tseng [1992]
Z. Q. Luo and P. Tseng.
On the convergence of the coordinate descent method for convex
differentiable minimization.
Journal of Optimization Theory and Applications, 72:7–35, 1992.
Mangasarian [1995]
O. L. Mangasarian.
Parallel gradient distribution in unconstrained optimization.
SIAM Journal on Optimization, 33(1):916–1925, 1995.
Nemirovski et al. [2009]
A. Nemirovski, A. Juditsky, G. Lan, and A. Shapiro.
Robust stochastic approximation approach to stochastic programming.
SIAM Journal on Optimization, 19:1574–1609, 2009.
Nesterov [2004]
Y. Nesterov.
Introductory Lectures on Convex Optimization: A Basic Course.
Kluwer Academic Publishers, 2004.
Nesterov [2012]
Y. Nesterov.
Efficiency of coordinate descent methods on huge-scale optimization
problems.
SIAM Journal on Optimization, 22(2):341–362, 2012.
Niu et al. [2011]
F. Niu, B. Recht, C. Ré, and S. J. Wright.
Hogwild!: A lock-free approach to parallelizing stochastic
gradient descent.
Advances in Neural Information Processing Systems 24, pages
693–701, 2011.
Peng et al. [2013]
Z. Peng, M. Yan, and W. Yin.
Parallel and distributed sparse optimization.
Preprint, 2013.
Richtárik and Takáč [2012a]
P. Richtárik and M. Takáč.
Iteration complexity of randomized block-coordinate descent methods
for minimizing a composite function.
Mathematrical Programming, 144:1–38,
2012a.
Richtárik and Takáč [2012b]
P. Richtárik and M. Takáč.
Parallel coordinate descent methods for big data optimization.
Technical Report arXiv:1212.0873, 2012b.
Scherrer et al. [2012]
C. Scherrer, A. Tewari, M. Halappanavar, and D. Haglin.
Feature clustering for accelerating parallel coordinate descent.
Advances in Neural Information Processing Systems 25, pages
28–36, 2012.
Shalev-Shwartz and Zhang [2013]
S. Shalev-Shwartz and T. Zhang.
Accelerated mini-batch stochastic dual coordinate ascent.
Advances in Neural Information Processing Systems 26, pages
378–385, 2013.
Shamir and Zhang [2013]
O. Shamir and T. Zhang.
Stochastic gradient descent for non-smooth optimization: Convergence
results and optimal averaging schemes.
In Proceedings of the 30th International Conference on Machine
Learning, 2013.
Tibshirani [1996]
R. Tibshirani.
Regression shrinkage and selection via the lasso.
Journal of the Royal Statistical Society, Series B,
58:267–288, 1996.
Tseng [2001]
P. Tseng.
Convergence of a block coordinate descent method for
nondifferentiable minimization.
Journal of Optimization Theory and Applications, 109:475–494, 2001.
Tseng and Yun [2009]
P. Tseng and S. Yun.
A coordinate gradient descent method for nonsmooth separable
minimization.
Mathematical Programming, Series B, 117:387–423,
June 2009.
Tseng and Yun [2010]
P. Tseng and S. Yun.
A coordinate gradient descent method for linearly constrained smooth
optimization and support vector machines training.
Computational Optimization and Applications, 47(2):179–206, 2010.
Wang and Lin [2014]
P.-W. Wang and C.-J. Lin.
Iteration complexity of feasible descent methods for convex
optimization.
Journal of Machine Learning Research, 15:1523–1548,
2014.
Wright [2012]
S. J. Wright.
Accelerated block-coordinate relaxation for regularized optimization.
SIAM Journal on Optimization, 22(1):159–186, 2012.
Yang [2013]
T. Yang.
Trading computation for communication: Distributed stochastic dual
coordinate ascent.
Advances in Neural Information Processing Systems 26, pages
629–637, 2013.