Asymptotic (statistical) periodicity in two-dimensional maps
Abstract
In this paper we give a new sufficient condition for asymptotic periodicity of Frobenius–Perron operator corresponding to two–dimensional maps. The result of the asymptotic periodicity for strictly expanding systems, that is, all eigenvalues of the system are greater than one, in a high-dimensional dynamical systems was already known. Our new theorem enables to apply for the system having an eigenvalue smaller than one. The key idea for the proof is a function of bounded variation defined by line integration. Finally, we introduce a new two-dimensional dynamical system exhibiting the asymptotic periodicity with different periods depending on parameter values, and discuss to apply our theorem to the model.
Fumihiko Nakamura111nfumihiko@mail.kitami-it.ac.jp
Kitami Institute of Technology,
165 Koen-cho, Kitami city, Hokkaido, 090-8507, Japan
Michael C. Mackey222michael.mackey@mcgill.ca
McGill University,
3655 Promenade Sir William Osler, Montreal, Quebec H3G 1Y6, Canada
2020 Mathematics Subject Classification. Primary: 37A30, 26A45; Secondary: 37E30.
Key words and phrases. Asymptotic periodicity, bounded variation, Frobenius–Perron operator, two-dimensional map, Farey series.
1 Introduction
In examining the behaviour of dynamical systems, two main complementary threads have emerged. In one, the evolution of trajectories is the main focus, while in the other the evolution of densities is considered. In the latter case, one can think of the evolution of densities representing the overall statistical behaviour when a large (‘infinite’) number of trajectories are examined. In this paper we focus on the second point of view, which is closely related to early work in statistical physics initiated by both Boltzmann [1] and Gibbs [2] over a century ago and which forms the basis of the field of ergodic theory.
In examining the evolution of densities, there are three major types of behaviour that may occur and they are ergodicity, mixing, and exactness [3]. In addition there is a less well known fourth type of behaviour, called asymptotic periodicity (or statistical periodicity), which was first introduced and studied by Keller [4]. We will say more about these four types of behaviour in Section 2.
Asymptotic periodicity is known to occur in deterministic discrete time dynamical systems [5, 6, 7, 8] as well as being induced by noise [9, 10, 11]. One example of asymptotic periodicity in a deterministic setting is that of the hat (or tent) map
| (1) |
which was considered by Ito [12, 13], Shigematsu [14], and Yoshida [15] initially and then by Provatas [8] within the framework of asymptotic periodicity. To our knowledge the only studies of noise induced asymptotic periodicity are in the noise perturbed Nagumo-Sato [16] map (also known as the Keener [17] map) and given by
| (2) |
where and the are independent random variables distributed with a density , and studied by [9, 10, 11].
In this paper we present a new theorem on asymptotic periodicity in maps of dimension greater than one, extending the result of [18] for asymptotic periodicity in a high-dimensional dynamical systems which was stated for strictly expanding systems, that is, for systems in which all eigenvalues are greater than one.
In Section 2.1 we summarize some elementary concepts and tools from ergodic theory, and then in Section 2.2 give some background and simple results on bounded variation for functions of two variables that will be essential in the proof of our main Theorem 3.1 in Section 3. In Section 4 we consider an example of our main theorem and illustrate how the period changes as parameters are changed.
2 Background
2.1 Tools and definitions from ergodic theory
This section collects together some basic concepts needed later. Consult [3] for more details.
Let be a measure space and assume that a system has states distributed in a phase space , and that the distribution of these states is characterized by a time dependent density , . Remember that is a density if . Equilibrium is characterized by a time independent density . Given a phase space we will denote the space of all densities on by or by if is understood.
Also think of a dynamics operating on the same phase space , . One way to think about a dynamics is through the evolution of a trajectory emanating from a single initial condition in the phase space , and a complementary approach is to study how a density of initial conditions evolves under the action of the dynamics. With a dynamics and initial density of states, the evolution of the density is given by , wherein is the Markov (or evolution transfer) operator corresponding to .
Definition 2.1.
Any operator that satisfies
for any , is called a Markov (or evolution) operator. If we restrict ourselves to only considering densities , then any operator which when acting on a density again yields a density is a density evolution operator.
Given an evolution operator operating on densities alone, so , if there is a density such that then is called a stationary density.
Definition 2.2.
Let be a measure space . If is a nonsingular transformation, then the unique Markov operator defined by
| (3) |
is called the Frobenius-Perron operator corresponding to .
Definition 2.3.
Let be a measure space and let a nonsingular transformation be given. Then is called ergodic if every invariant set (i.e. ) is such that either or ; that is, is ergodic if all invariant sets are trivial subsets of .
Ergodicity is equivalent to:
Theorem 2.4.
[3, Theorem 4.4.1a] Let be a normalized measure space, . A dynamics on a phase space with Frobenius-Perron operator and unique stationary density is ergodic if and only if is Cesàro convergent to for all initial densities , i.e., if
| (4) |
where is any bounded measurable function and
| (5) |
denotes the -valued inner product.
Definition 2.5.
Let be a normalized measure space, and a measure-preserving transformation. is called mixing if
| (6) |
Mixing implies ergodicity and is equivalent to:
Theorem 2.6.
[3, Theorem 4.4.1b] A dynamics on a phase space with Frobenius-Perron operator and unique stationary density is mixing if and only if
| (7) |
for every initial density and bounded measurable function .
Definition 2.7.
Let be a normalized measure space and a measure-preserving transformation such that for each . If
| (8) |
then is called exact or asymptotically stable.
Exactness implies mixing and is equivalent to:
Theorem 2.8.
[3, Theorem 4.4.1c] A dynamics on a phase space with Frobenius-Perron operator and unique stationary density is asymptotically stable if and only if
| (9) |
for every initial density .
Asymptotically stable systems have a number of interesting properties (cf. [3, 19] for more complete details). Asymptotically stable systems are non-invertible and they always have a unique stationary density .
Next, we define a smoothing Markov operator.
Definition 2.9.
Let be a measure space. A Markov operator is said to be smoothing (or constrictive) if there exists a set of finite measure, and two positive constants and such that for every set with and every density there is some integer for which
This definition of smoothing just means that any initial density, even if concentrated on a small region of the phase space , will eventually be ’smoothed’ out by and not end up looking like a delta function. Notice that if is a finite phase space we can take so the smoothing condition looks simpler:
Smoothing operators are important because of a theorem of [20] introduced next, first proved in a more restricted situation by [5]. Although the property called weakly constrictive introduced in [5] and [20] seems to be different from smoothing, it also leads to asymptotic periodicity. Conversely, we can immediately show that an asymptotically periodic Markov operator is smoothing and weakly constrictive in the sense of [5]. Thus we conclude smoothing and weakly constrictiveness are equivalent.
Theorem 2.10 (Spectral Decomposition Theorem, [20]).
Let be a smoothing Markov operator. Then there is an integer , a sequence of nonnegative densities and a sequence of bounded linear functionals , and an operator such that for all densities , has the form
| (10) |
The densities and the transient operator have the following properties:
-
1.
The have disjoint support (i.e. are mutually orthogonal and thus form a basis set), so for all .
-
2.
For each integer there is a unique integer such that . Furthermore, for . Thus the operator permutes the densities .
-
3.
as .
Notice from (10) that may be immediately written in the form
| (11) |
where , as , and . The density terms in the summation of (11) are just permuted by each application of . Since is finite, the series
| (12) |
must be periodic with a period . Further, as is just a permutation of the summation (12) may be written in the alternative form
where is the inverse permutation of .
This rewriting of the summation portion of (11) makes the effect of successive applications of completely transparent. Each application of simply permutes the set of scaling coefficients associated with the densities [remember that these densities have disjoint support].
Since is finite and the summation (12) is periodic (with a period bounded above by ), and as , we say that for any smoothing Markov operator the sequence is asymptotically (statistically) periodic or, more briefly, that is asymptotically periodic. Komorník [21] has reviewed the subject of asymptotic periodicity.
Asymptotically periodic Markov operators always have at least one stationary density given by
| (13) |
where and the are defined in Theorem 2.10. It is easy to see that is a stationary density, since by Property 2 of Theorem 2.10 we also have
and thus is a stationary density of . Hence, for any smoothing Markov operator the stationary density (13) is just the average of the densities .
Remark 2.11.
It is known [3, Section 5.5] that mixing, exactness and asymptotically periodicity with are all equivalent for a smoothing Markov operator. This means that the case has a strictly stronger mixing property than the case . In terms of published examples having periodicity with not only but also , we only know the hat map (1) and the noise perturbed [16] map (2) (see section 4 for a discussion of the parameters of the hat map showing asymptotic periodicity when ). The model we introduce in Section 4 is a new two-dimensional example having different periods depending on parameter values.
2.2 Functions of bounded variation in two variables
There are many definitions of the total variation for functions of two real variables. For example, see [22] and [23] summarized in [24, 25]. In this paper, we refer to the definition in [26] which is defined using line integration.
Consider a compact subset , a function and a continuous and piecewise curve . Although Ashton [26] found it sufficient to consider polygonal curves, that is, piecewise linear continuous curves, we need to treat more general continuous curves since we focus on non-linear transformations. We denote the set of all continuous and piecewise curves by .
Definition 2.12.
Let , then is called a partition of over if for all and there exists a partition such that for all , where is the set of all partitions of . The set of all partitions of over is denoted by .
Definition 2.13.
Let be compact, and consider a function and a curve . The variation of along the curve is defined as
| (14) |
Remark 2.14.
From the definition, one can rewrite as
| (15) |
Note that we sometimes omit and simply write for the above equation.
The following basic properties for the variation are known.
Proposition 2.15.
([26, Proposition 3.2]) Let be a nonempty compact subset of , , and . Suppose with . Then,
-
(i)
,
-
(ii)
,
-
(iii)
,
-
(iv)
,
-
(v)
,
-
(vi)
.
Definition 2.16.
The compact and connected sets are said to be adjacent if and .
Now we note the following property for the .
Proposition 2.17.
([27, Theorem 4.9]) Let be two compact and connected adjacent sets. Then, for any ,
Lemma 2.18.
Let be a nonempty compact on , and . Assume that is a one-to-one map. Then,
Proof.
∎
Definition 2.19.
Let be the set of all convex closed Jordan curve on . Then is said to be an entry point of on a curve if either
-
(i)
and , or
-
(ii)
and for all there exists such that .
Set to be the number of entry points of on and to be the supremum of over all convex closed Jordan curves , that is,
| (16) |
Remark 2.20.
In [26], is defined by lines instead of curves, but we need the definition by curves for our main theorem.
Definition 2.21.
Let . The variation of on is defined by
| (17) |
If satisfies and , then we define .
The following properties for the variation define above are well-known.
Proposition 2.22.
Let be a nonempty compact subset of , and . Then,
-
(i)
,
-
(ii)
,
-
(iii)
,
-
(iv)
.
Finally, we state and prove the following lemma in order to prove our main theorem.
Lemma 2.23.
Let be a compact set. Assume is a function. If there exists a constant such that and for any , then is bounded.
Proof.
Since is a function and is a piecewise curve, then we have
which is bounded. Thus is bounded. ∎
3 Main theorem
Gora and Boyarsky [18] gave a sufficient condition for asymptotic (statistical) periodicity in piecewise maps on using a general definition of the total variation. Their assumptions are stronger than ours since they assume that the map is expanding in all directions and thus all eigenvalues of the Jacobian are larger than one.
Our main result gives a sufficient condition for asymptotic periodicity of more general piecewise maps on , that are not necessarily expanding in all directions, by using the definition of variation constructed by line integration as introduced in [27]. Let be a connected compact subset.
Theorem 3.1.
Let satisfy the following conditions:
-
(i)
There is a partition of such that for each ,
-
–
the restricted map is a and one-to-one function,
-
–
each boundary is a piecewise curve having a finite boundary length,
-
–
the set is convex;
-
–
-
(ii)
For , each Jacobian of satisfies
-
(iii)
There are real constants such that, for ,
-
(iv)
There exists such that for any curves on , a curve constructed by connecting all curves whose length is minimal satisfies
-
(v)
The numbers satisfy
Let be the Frobenius-Perron operator corresponding to . Then, for all , is asymptotically periodic.
Remark 3.2.
Item (ii) implies an area expanding property. If the system satisfied only condition (ii), we can immediately find a counterexample of non-asymptotically periodic transformations. For example, the piecewise linear map mod 1 has Jacobian but has eigenvalues and . It is clear that the map has no absolutely continuous invariant measure with respect to Lebesgue measure, which means that the corresponding Frobenius-Perron operator is not asymptotically periodic. However, if we take a partition satisfying (i) and the system satisfies (iv) and (v), then such counterexamples can be excluded. Indeed, we find that the factor must be larger than for the map , and (v) cannot hold.
Proof of Theorem 3.1
First we write the Frobenius-Perron operator corresponding to as
where and for with and . Each is a Jacobian on .
We then calculate the variation for of bounded variation, denoted by . We first calculate, by (i) of Proposition 2.15,
By (ii) of Proposition 2.15,
By the mean value theorem for definite integrals, we have
| (18) |
Then we have
| (20) | |||||
Since is bounded by Lemma 2.23, there is some constant such that
Changing the variables by ,
| (21) |
since . We next calculate Eq.(20). For , , the sets are defined by
Then,
| (23) | |||||
By definition, we have
and
Now let be . For this case must be larger than since is a convex closed Jordan curve by assumption (i). Thus we have
| (24) |
Using Lemma 2.18,
Since is a curve on , we can make a new curve on by connecting all curves for whose length becomes minimal. Then, by (v) in Proposition 2.15,
Moreover, since are adjacent, by Proposition 2.17,
| (25) |
Thus, by assumption (iv),
| (26) | |||||
where
is independent of . Here we use the same procedure for the second term of Eq.(24) as in the calculations from Eq.(18) to Eq.(21). By assumption (v),
and therefore, for every of bounded variation,
where is independent of . Hence, we define by
It is clear that for any density defined on ,
for any . Since , there is some such that and then we have . Thus is weakly precompact by the criteria 1 in [3, page 87]. Moreover, by the criteria 3 in [3, page 87], a set of functions is weakly precompact if and only if: (a) There is an such that for all ; and (b) For every there is a such that
This implies that there is a such that
which shows is smoothing and thus asymptotically periodic by Theorem 2.10.
∎
Corollary 3.3.
Let be a transformation and be the Frobenius-Perron operator corresponding to . If there exists a number such that satisfies Conditions (i)-(v) in Theorem 3.1, then, for all , is asymptotically periodic.
4 Two-dimensional example
In this section we offer a new two dimensional example illustrating our results.
For parameters and , consider the two-dimensional transformation given by
| (28) |
Here the transformation is the generalized tent map, a straightforward modification of (1). As we noted previously, is statistically periodic [8] and more precisely, the Frobenius-Perron operator corresponding to has period when the parameter satisfies
Next we introduce the transformation defined by
| (29) |
Then, and are homeomorphic, i.e. holds where
| (30) |
Remark 4.1.
The general system (29) was also considered by Sushko [29], and they noted a border-collision bifurcation [31] in the system. Although a well-known system similar to Eq.(29) is the Lozi [30] map given by
the model we treat is different. Note that if the term is replaced by , we obtain the Hénon [32] map.
Elhadj [33] suggested a similar example as a new two dimensional piecewise linear chaotic map, noting that (28) can also be written in the alternate form
| (31) |
Indeed, taking a new variable , we can write
so that the two-dimensional dynamical system with can be represented by (28).
If we consider the -time delay difference equation, we can construct a -dimensional discrete dynamical system. Losson [34] considered a coupled map lattice which induces a high dimensional map to approximate solutions of differential delay equations. They found periodic orbits of an initial point and a periodicity for the evolution of densities analogous to asymptotic periodicity.
4.1 Numerical results
In this section, we numerically study the transformation (29) to illustrate our results.
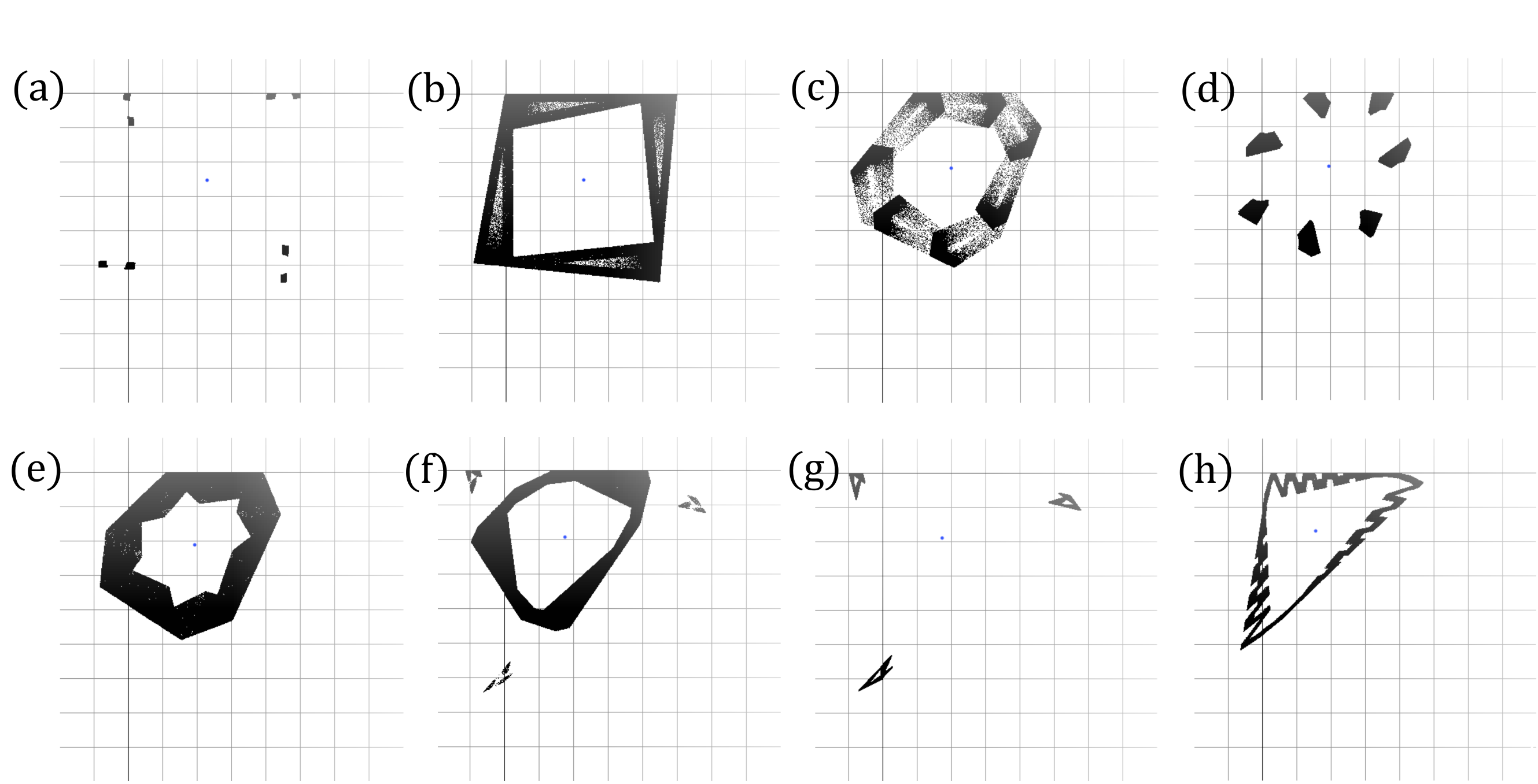
Let be the Frobenius-Perron operator corresponding to . In Figure 1 (for positive ) and Figure 2 (for negative )), we show the support of for an initial density , . and various values of . We see there are disjoint regions, in Figure 1 (a),(e),(g),(h),(i),(k) and in Figure 2 (a),(d),(f),(g), and they are the signature of asymptotic periodicity. For example, in Figure 1h there are five disjoint regions: all points in one region are mapped to another region by and eventually come back to the initial region by . Therefore, the two-dimensional map (29) has many different periods. Conversely, the cases in which there is only one component (e.g. Figure 1 (b),(c),…) display asymptotic stability, that is asymptotic periodicity with .
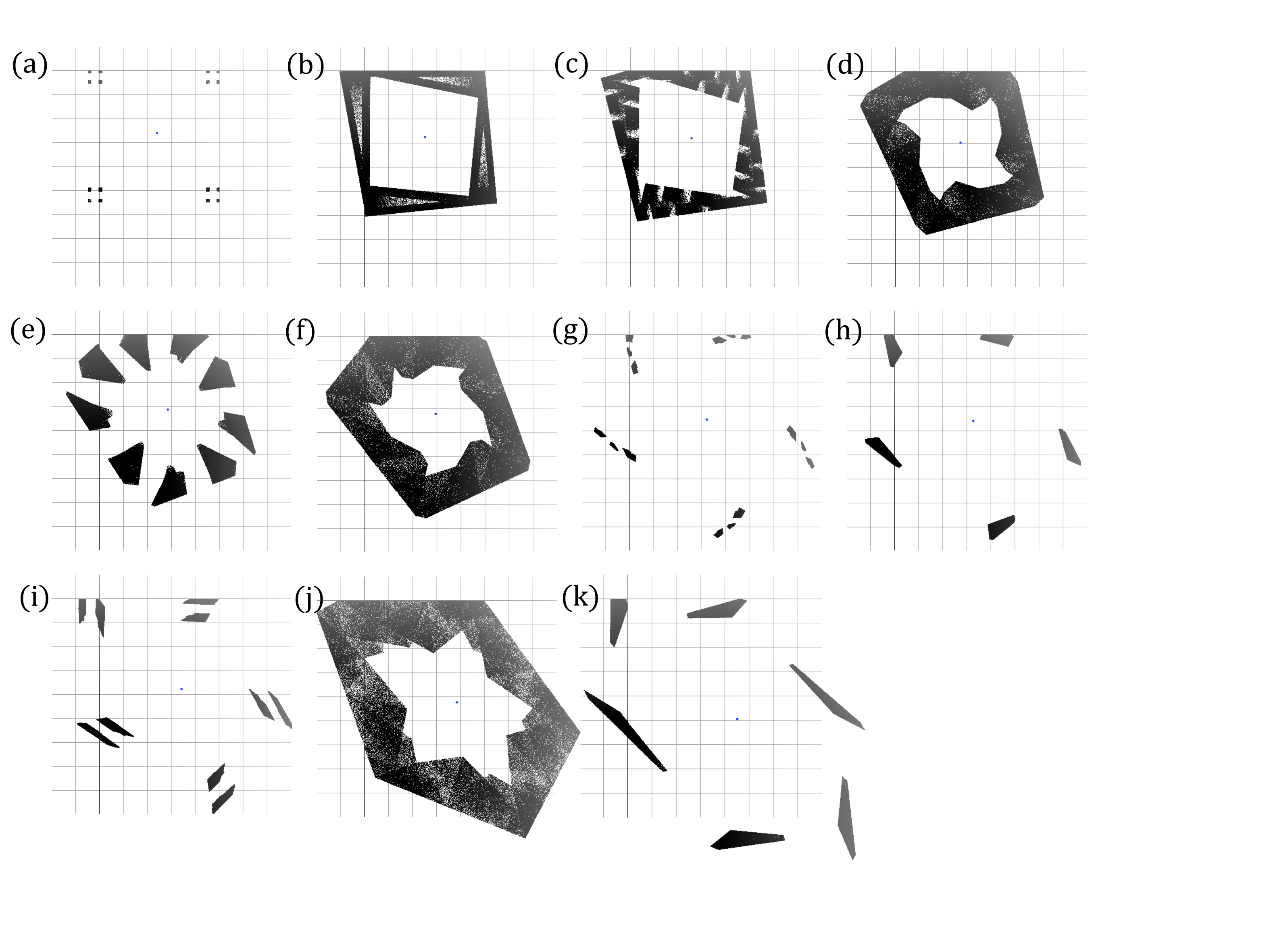
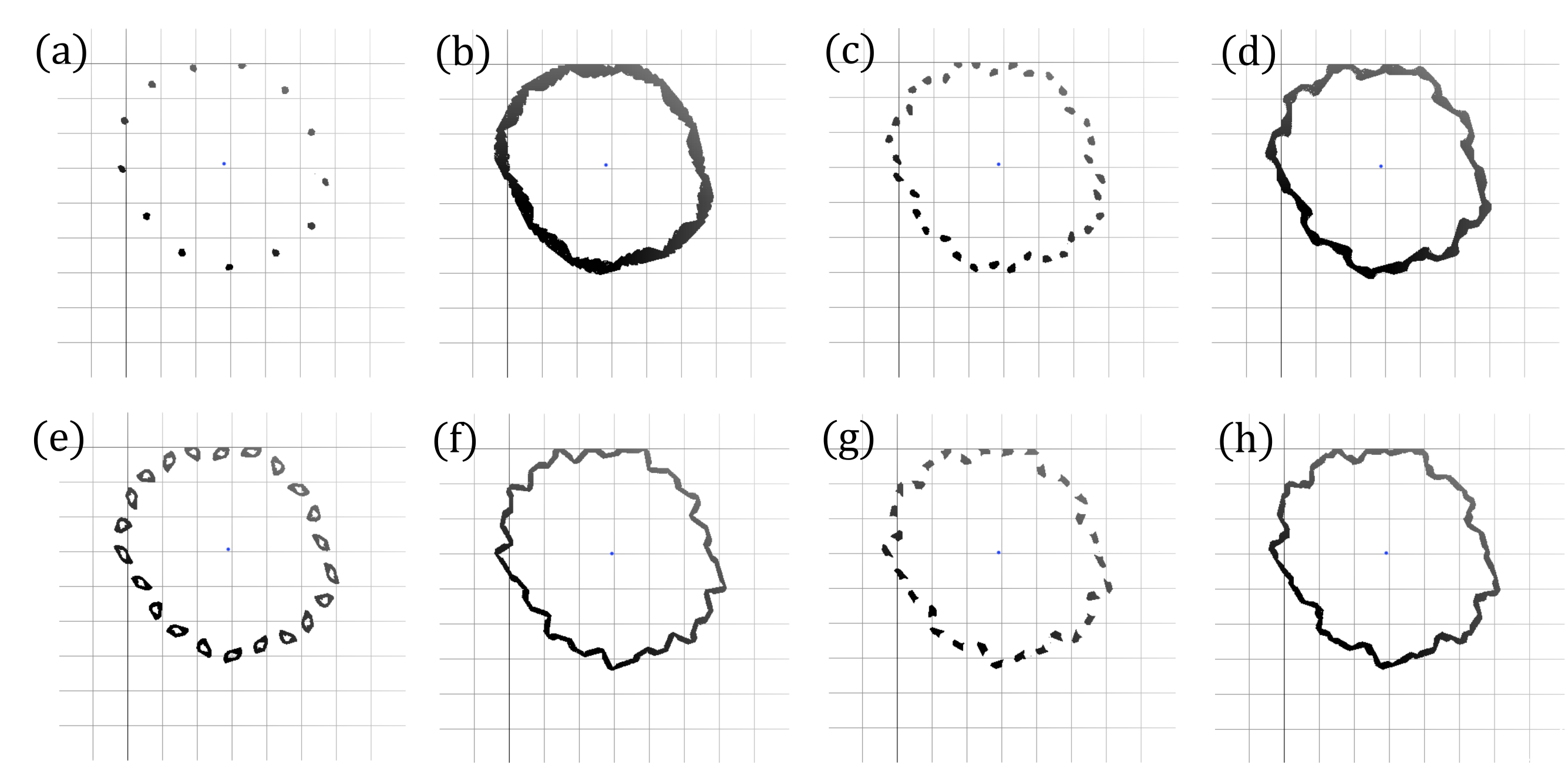
For smaller in Figure 3 we observe higher periods (Period: (a) 13, (c) 35, (e) 22, (g) 31). In addition to this, we find period when . These numerical values of the periods may be related to a Farey series, see Section 4.3.
4.2 Discussion: Asymptotic periodicity
Consider (29) in the context of Corollary 3.3. Since (29) is piecewise linear and the Jacobian for is , the assumptions (i)-(iv) of Theorem 3.1 are satisfied. Thus we need only show the condition (v) holds, that is, where denotes the number of partitions for .
Without loss of generality, it is enough to consider the system (29) on the half plane since all points are in after iterating once. Let , and be the sets , and respectively, and denote
| (32) |
One immediately has the following properties for (29):
-
•
If , there exists a fixed point .
-
•
If , there exists a fixed point .
-
•
The eigenvalues of the Jacobian are and , and the corresponding eigenvectors are and .
-
•
Since always holds, if . This implies the fixed point is unstable.
-
•
If and , then and is an unstable node, and almost all points diverge in this case.
-
•
In the case , then is complex which implies is an unstable focus (if ), a center (if ) and a stable focus (if ).
Based on these observations, we focus on parameters satisfying , , , and . Note that although asymptotic periodicity is observed even when (Figure 2), here we assume to simplify the arguments.
First, we know the saddle point . Let be the set
| (33) |
From the instability of the fixed point , one can immediately conclude that all points in eventually diverge. Next, let be a -intercept of the line , that is, . Then the -intercept of the line can be calculated as which is always negative when .
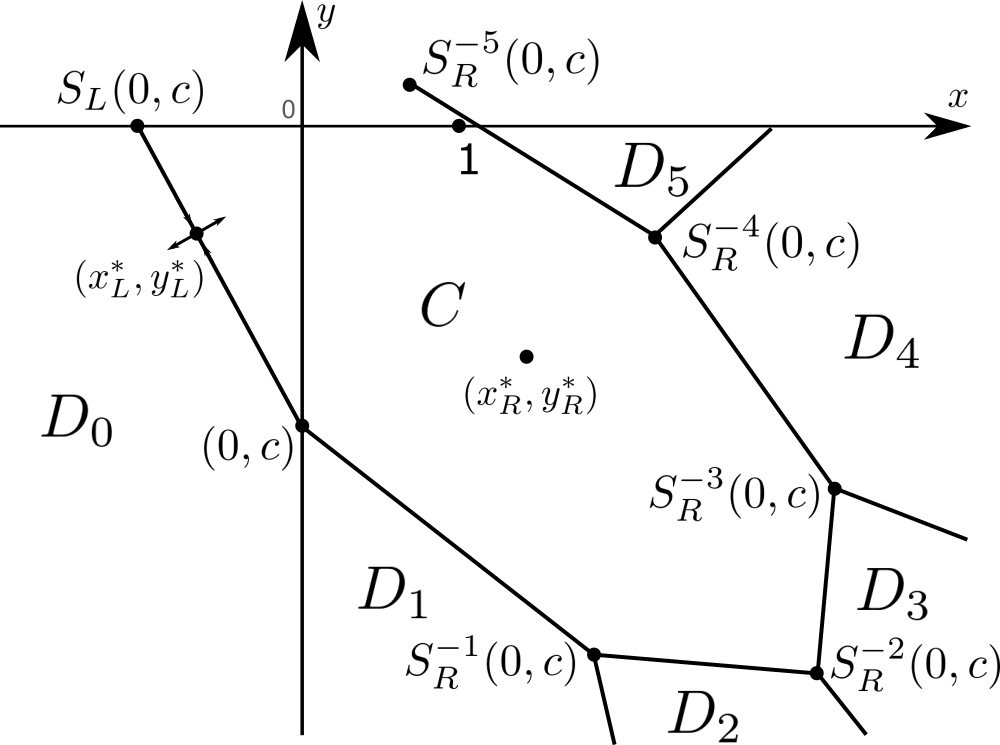
Second, consider the inverse sets and the inverse of a point , for . Note that all points in for some diverge. Now let be a minimum number such that the -coordinate of is positive. Then let be a set defined by
| (34) |
Then becomes the candidate for the attracting region. Figure 4 illustrates the partition of the half plane () and regions and for the case .
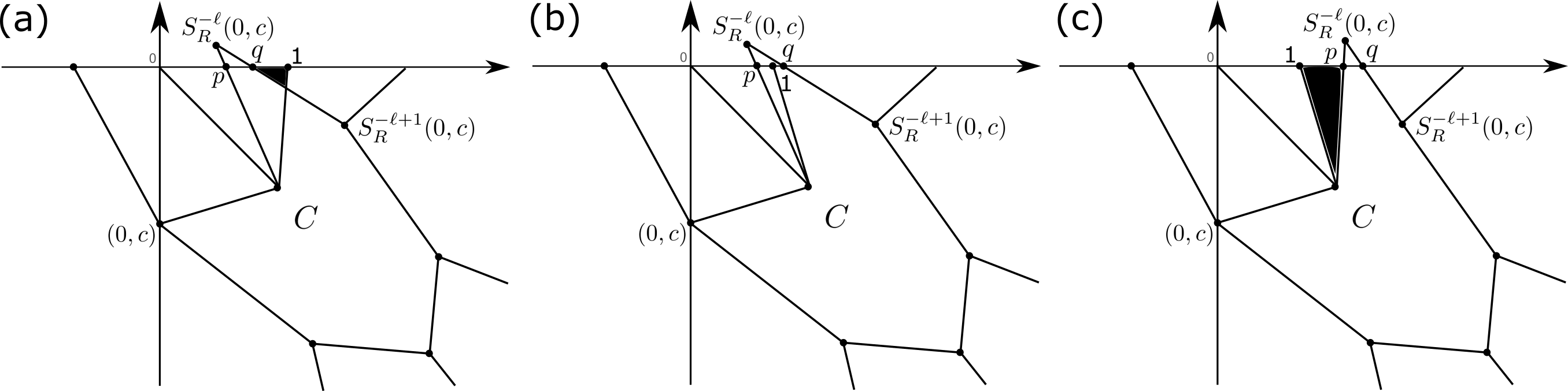
Third, let (and ) be the -coordinate of the intersection point of the line and the line generated by and (and and ). We can consider three cases depending on the values of relative to .
Figure 5 illustrates the three possible cases. Figure 5 (a) shows the case in which both , (b) shows the case , and (c) shows the case with . We immediately observe that points in may leave from in case (a) because of the black region, and if then is a conserved region. Therefore, we can construct a dynamical system which acts on a bounded set by giving the restricted system for the case (b) or (c). We focus on case (b).
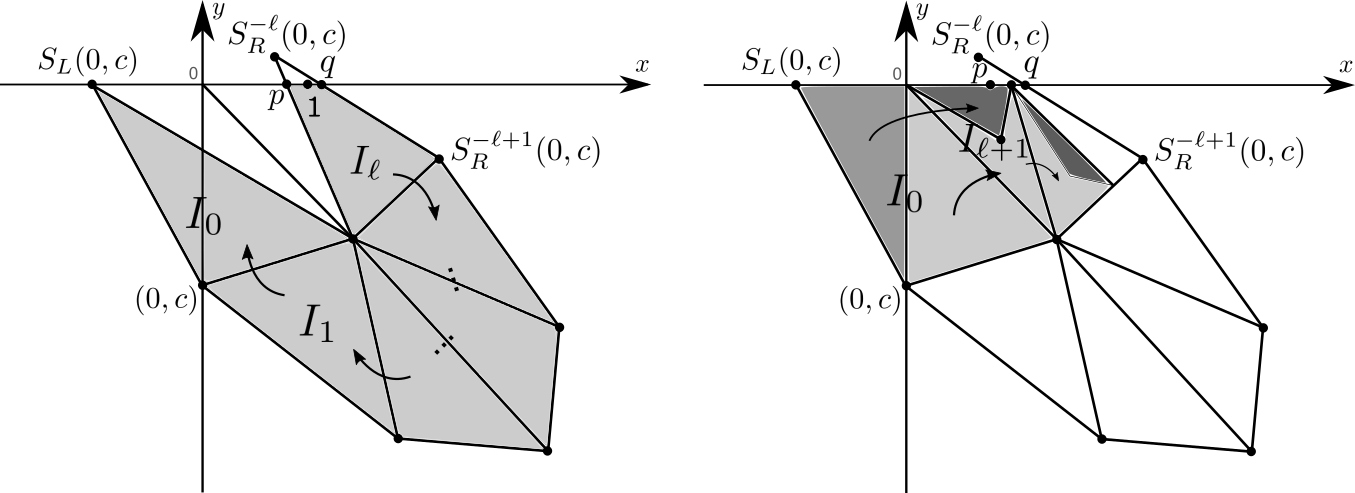
From these observations, there exists a partition in such that for any (see Figure 6). The condition (iv) implies the ratio of entry point of the before and after curve by the inverse transformation. In our case, an increase of the number of entry points happens only for the , in other words, the other , does not increase the entry points because of the rotational behavior. Since , for some , which is the Jacobian of , might be larger than . Namely, the condition (iv) and (v) in Theorem 3.1 would be satisfied for with sufficiently large .
However, it is difficult to check the condition (iv) because of the impossibility to calculate the change of entry points for all curves. Thus, we do not have checkable sufficient conditions for the assumption (iv) to prove asymptotic periodicity for , which is strongly suggested by the numerical results. In the case (c), although it is more complicated due to the black region, we may use similar arguments after one more iterate .
Finally, we will estimate the parameter conditions such that since at least must be larger than 1 to be a conservative system. If we set , then where
Thus we have
where are eigenvalues of with . By using the above equations, we may write , and explicitly. However, not only is the calculation complicated, but also we cannot obtain the number for each set of parameters. Thus we numerically show only approximate values of which gives the condition for for some values of in Table 1.
| 1.01 | 14 | 1.85664 | 1.06 | 7 | 1.57519 | 1.2 | 4 | 1.15624 | 1.7 | 3 | 0.53436 |
| 1.02 | 11 | 1.78516 | 1.07 | 7 | 1.56379 | 1.3 | 3 | 1.03992 | 1.8 | 2 | 0.32593 |
| 1.03 | 9 | 1.71214 | 1.08 | 6 | 1.48766 | 1.4 | 3 | 0.78308 | 1.9 | 2 | 0.13439 |
| 1.04 | 8 | 1.65753 | 1.09 | 6 | 1.46841 | 1.5 | 3 | 0.66496 | 2.0 | 2 | 0.00000 |
| 1.05 | 8 | 1.64245 | 1.1 | 5 | 1.45765 | 1.6 | 3 | 0.58999 |
4.3 Discussion: Period
We would like to be able to predict the period of the asymptotic periodicity in (29) for a given set of parameters , but although we can make a partition as the previous section, we cannot find the period or the relation between and period.
The numerical results in Figure 1,2 and 3 tantalizingly remind one of the Farey series333The definition of Farey series of order , denoted by , is the set of reduced fractions in the closed interval with denominators , listed in increasing order of magnitude. For instance, , , and so on. (See [35] for details). One of the important properties of Farey series is that each fraction in which is not in is the mediant of a pair of consecutive fractions in . For example, in is made by and in , that is, . The operation is called the Farey sum.. In dynamical systems, periodic structures based on the Farey series sometimes appear, for instance in circle map models of cardiac arrhythmias [36, 38, 37]. The fraction corresponds to a rotation number of the system, that is, every periodic orbit has period . Nakamura [11] proved that the Markov operator corresponding to the perturbed piecewise linear map (2) exhibits asymptotically periodicity, and clarified the relationship of the periods associated with the Farey series for various parameters.
For our example (29), Figure 3 displays asymptotic periodicity with period 22 in between values of the parameter giving rise to period 13 and 9, while period 35 is between 13 and 22, and period 31 is between 22 and 9. Moreover, we observe period , and . That is, there exist parameters for which the system has asymptotic periodicity with period between the parameters which give periods and . To take this observation and relate the periodicity of (29) to the Farey series is a matter for future research.
Acknowledgement
The work is supported by the Natural Sciences and Engineering Research Council (NSERC) of Canada, and the Ministry of Education, Culture, Sports, Science and Technology through Program for Leading Graduate Schools (Hokkaido University “Ambitious Leader’s Program”).
References
- [1] L. Boltzmann, Lectures on gas theory, Courier Corporation, 2012.
- [2] J.W. Gibbs Elementary Principles in Statistical Mechanics, Dover, New York, 1962.
- [3] A. Lasota, and M.C. Mackey, Chaos, fractals, and noise: stochastic aspects of dynamics. Springer Science & Business Media, New York, 2013.
- [4] F. Hofbauer and G. Keller, Ergodic properties of invariant measures for piecewise monotonic transformations, Math. Z, 180 (1982), 120–141.
- [5] A. Lasota, T.Y. Li and J.A. Yorke, Asymptotic periodicity of the iterates of Markov operators Transactions of the American Mathematical Society, 286(2) (1984), 751–764.
- [6] J. Komorník, Asymptotic periodicity of the iterates of weakly constrictive Markoy operators, Tohoku Mathematical Journal, Second Series, 38(1) (1986), 15–27.
- [7] A. Lasota and J.A. Yorke, Statistical periodicity of deterministic systems, Časopis pro pěstování matematiky, 111(1) (1986), 1–13.
- [8] N. Provatas and M.C. Mackey, Asymptotic periodicity and banded chaos, Physica D. Nonlinear Phenomena, 53(2–4) (1991), 295–318.
- [9] A. Lasota and M.C. Mackey, Noise and statistical periodicity, Physica D. Nonlinear Phenomena, 28(1–2) (1987), 143–154.
- [10] N. Provatas and M.C. Mackey, Noise-induced asymptotic periodicity in a piecewise linear map, Journal of statistical physics, 63(3–4) (1991), 585–612.
- [11] F. Nakamura, Asymptotic behavior of non-expanding piecewise linear maps in the presence of random noise, Discrete & Continuous Dynamical Systems-B, 23(6) (2018), 2457–2473.
- [12] S. Ito, S. Tanaka and H. Nakada, On unimodal linear transformations and chaos. I, Tokyo Journal of Mathematics 2 (1979) 221–239.
- [13] S. Ito, S. Tanaka and H. Nakada, On unimodal linear transformations and chaos. II Tokyo Journal of Mathematics 2 2 (1979), 241–259.
- [14] H. Shigematsu, H. Mori, T. Yoshida and H. Okamoto, Analytic study of power spectra of the tent maps near band-splitting transitions, Journal of Statistical Physics 30(3) (1983), 649–679.
- [15] T. Yoshida, H. Mori and H. Shigematsu, Analytic study of chaos of the tent map: band structures, power spectra, and critical behaviors, Journal of Statistical Physics, 31(2) (1983) 279–308.
- [16] J. Nagumo and S. Sato, On a response characteristic of a mathematical neuron model, Kybernetik, 10(3) (1972), 155–164.
- [17] J.P. Keener, Chaotic behavior in piecewise continuous difference equations, Transactions of the American Mathematical Society, 261(2) (1980), 589–604.
- [18] P. Gora and A. Boyarsky, Absolutely continuous invariant measures for piecewise expanding transformations in , Israel journal of Mathematics, 67(3) (1989), 272–286.
- [19] M. C. Mackey. Time’s Arrow: The Origins of Thermodynamic Behaviour, Springer-Verlag, Berlin, New York, Heidelberg, 1992.
- [20] J. Komorník and A. Lasota, Asymptotic decomposition of Markov operators, emphBulletin of the Polish Academy of Sciences. Mathematics, 35(5–6) (1987), 321–327.
- [21] J. Komorník, Asymptotic periodicity of Markov and related operators, Dynamics reported, 2 (1993), 31–68.
- [22] G. Vitali, Sulle funzione integrali, Atti Accad. Sci. Torino Cl. Sci. Fis. Mat. Natur., 40 (1904/1905), 1021–1034.
- [23] G.H. Hardy, On double Fourier series, and especially those which represent the double zeta-function with real and incommensurable parameters, Quart. J. Math. Oxford, 37 (1905/1906), 53–79.
- [24] C.R. Adams and J.A. Clarkson, Properties of functions of bounded variation, Transactions of the American Mathematical Society, 36(4) (1934), 711–730.
- [25] V.V. Chistyakov and Y.V. Tretyachenko, Maps of several variables of finite total variation. I. Mixed differences and the total variation, Journal of Mathematical Analysis and Applications, 370(2) (2010), 672–686.
- [26] B. Ashton and I. Doust, Functions of bounded variation on compact subsets of the plane, Studia Mathematica, 169 (2005), 163–188.
- [27] J. Giménez, N. Merentes and M. Vivas, Functions of bounded variation on compact subsets of C, Commentationes Mathematicae, 54(1) (2014), 3–19.
- [28] H. Toyokawa, -finite invariant densities for eventually conservative Markov operators, Discrete & Continuous Dynamical Systems-A, 40(5) (2020), 2641–2669.
- [29] I. Sushko and L. Gardini, Center bifurcation for two-dimensional border collision normal form, International Journal of Bifurcation and Chaos, 18(4) (2008), 1029–1050.
- [30] R. Lozi, Un attracteur étrange (?) du type attracteur de Hénon, Le Journal de Physique Colloques, 39 C5 (1978), C5–9.
- [31] H. E. Nusse and J. A. Yorke, Border-collision bifurcations including “period two to period three” for piecewise smooth systems, Physica D: Nonlinear Phenomena, 57(1-2), (1992), 39–57.
- [32] M. Hénon, A two-dimensional mapping with a strange attractor, The Theory of Chaotic Attractors, (1976), 94–102.
- [33] Z. Elhadj and J.C. Sprott, A new simple 2-D piecewise linear map, Journal of Systems Science and Complexity, 23(2) (2010), 379–389.
- [34] J. Losson and M.C. Mackey, Coupled map lattices as models of deterministic and stochastic differential delay equations, Physical Review E. Statistical, Nonlinear, and Soft Matter Physics, 52 1 part A (1995) 115–128.
- [35] T. M. Apostol, Modular Functions and Dirichlet Series in Number Theory, Springer-Verlag, New York-Heidelberg, 1976.
- [36] P.L. Boyland, Bifurcations of circle maps: Arnol’d tongues, bistability and rotation intervals, Communications in Mathematical Physics, 106(3) (1986), 353–381.
- [37] G. Swiatek, Rational rotation numbers for maps of the circle, Communications in mathematical physics, 119 (1988), 109–128.
- [38] L. Glass, M.R. Guevara, A. Shrier and R. Perez, Bifurcation and chaos in a periodically stimulated cardiac oscillator, Physica D: Nonlinear Phenomena, 7(1–3), (1983), 89–101.