Bifurcation of periodic orbits for the -body problem, from a non geometrical family of solutions.
Abstract.
Given two positive real numbers and and an integer , it is well known that we can find a family of solutions of the -body problem where the body with mass stays put at the origin and the other bodies, all with the same mass , move on the - plane following ellipses with eccentricity . It is expected that this geometrical family that depends on , has some bifurcations that produces solutions where the body in the center moves on the -axis instead of staying put in the origin. By doing analytic continuation of a periodic numerical solution of the -body problem –the one displayed on the video http://youtu.be/2Wpv6vpOxXk –we surprisingly discovered that the origin of this periodic solution is not part of the geometrical family of elliptical solutions parametrized by the eccentricity . It comes from a not so geometrical but easier to describe family. Having notice this new family, the authors find an exact formula for the bifurcation point in this new family and use it to show the existence of non planar periodic solution for any pair of masses , and any integer . As a particular example we find a solution where three bodies with mass move around a body with mass that moves up and down.
Key words and phrases:
-body problem, periodic orbits, bifurcations, analytic continuation method.2010 Mathematics Subject Classification:
70F10, 37C27, 34A12.1. Introduction
The spatial isosceles solutions of the three body problem are solutions where two bodies of equal mass have initial positions and velocities symmetric with respect to the -axis which passes through their center of mass at the origin, the third body of mass moves on the -axis, and at any time the three bodies form an isosceles triangle. The youtube video https://www.youtube.com/watch?v=fSmQyeKcj5k shows some images of a periodic spatial solution. Due to the importance and several applications that the spatial three body configuration offers, nowadays there is a large numbers of papers devoted to this problem, see for example [1, 2, 10, 12, 13, 15, 17, 18] and specially [7] and the references therein. In all cited papers, the existence of periodic spatial isosceles solutions has been considered using variational methods, numerical methods or techniques of analytical continuation. In most of the cases it is assumed that the body on the -axis has a small mass or a mass , see [1, 3, 10, 15]. In the latter case we obtain the Sitnikov problem. For example in [1] using the analytical continuation method of Poincaré, the authors prove analitically the existence of periodic and quasi-periodic spatial isosceles solutions, for sufficiently small as a continuation of some well known periodic solutions of the reduced circular Sitnikov problem (when the body in the -axis has infinitesimal mass and the other bodies move in circular orbits of the two-body problem). Using variational methods and for non necessarily small, the authors in [18] prove numerically the existence of spatial isosceles solutions as minimizers of the corresponding Lagragian action functional. A natural generalization of the spatial isosceles solutions are those where bodies move on the vertex of a regular polygon perpendicular to the -axis and the -th body moves along the -axis. An example of this type of solution can be seen in the youtube video https://www.youtube.com/watch?v=PtEMb6Rvflg.
In order to describe these motions more precisely, let us define
A direct computation (also see [11]), shows that
Theorem 1.1.
The functions
with
satisfying
provides a solution of the -body problem with and masses for the body moving along and mass for each body moving along the function , if and only if
| (1.1) |
where and
Related to the system (1.1) we mention some important results obtained in [11, 12, 13, 14] by the first author of this paper. Firstly, a reduction of the system (1.1) to a single second order differential equation, see [11]. Secondly, a rigorous mathematical proof of the periodicity of a solution of the 3-body problem describe by (1.1), see [12]. This was achieved through a numerical method that keeps track of the round-off error, developed in [14] and also by a lemma that can be viewed as a numerical version of the implicit function theorem, see [12]. Finally, in [13] the author describes a new family of symmetric periodic solutions of (1.1) that contains a nontrivial bifurcation point. The diagram of periodic solutions in the space of initial conditions (similar to the one in Figure 4.2) shows four branches emanating from this bifurcation solution. One is unbounded, another has as a limit point a solution where there is collision of two bodies, the third branch has as a limit point a solution where there is collision of the three bodies and the fourth one ends on a family of trivial solutions.
The main purpose of this paper is to provide an analysis of the properties of the family of periodic solutions in the fourth branch mentioned above and to provide an explicit formula for its limit point. To this end, assuming nonzero angular momentum for (1.1) we will consider an appropriate system which symmetries can be used to obtain the periodic solutions in the fourth branch; see Section 2. In Section 3, we prove Theorems 3.1 and 3.2 which are the statements of our main results. It is interesting to compare our results in this paper with those in [1]. Both papers analytically show the existence of periodic solutions using analytic continuation techniques. The new solutions in [1] emanate from solutions of the Sitnikov problem while those in this paper emanates from what we can call “part of circular solutions” where the two masses and , are arbitrary. We call them part of circular solutions because of the bodies move on a circle but they do not necessarily cover the whole circle. Finally, numerical validation of the theoretical results obtained in Section 3 are presented in Section 4.
2. The reduced problem and symmetries
A simple inspection of the system (1.1), shows that is the first integral of the angular momentum . Having said this, throughout this document we consider only solutions of (1.1) with nonzero angular momentum, i.e., . This assumption allows us to consider only the initial value problem,
| (2.1) |
We can check that, if is a solution of (2.1) and
then is a solution of (1.1). From now on, we denote by
the solutions of the system (1.1) with initial conditions
| (2.2) |
Remark 2.1.
If for some and , and are -periodic of the system (2.1) then defines a periodic solution of the -th body, if and only if is equal to with and whole numbers. See [13]. In general, -periodic solutions of the systems (2.1) define reduced-periodic solutions of the -body problem. This is, solutions with the property that every unites of time, the positions and velocities of the bodies only differ by an rigid motion in
The existence of periodic solutions of (1.1) becomes simpler if we restrict our seach to periodic solutions with symmetries. In such a case, the following lemma, see [13] provides a useful result.
Lemma 2.2.
Let be a solution of (2.1).
-
If for some we have
then and are both -periodic functions.
-
If for some we have
then and are both -periodic functions.
It is worth to mentioning that the solutions that satisfies are called odd solutions because is an odd function with respect to . On the other hand, if satisfies they are called odd/even solutions because is an odd function with respect to , but with respect to , both functions and are even. Furthermore, we point out that every odd/even solution is also an odd solution.
3. Main results
3.1. Periodic solutions for the reduced problem
In this section we prove the existence of a one parametric a family of periodic solutions for the reduced -body problem (2.1).
Theorem 3.1.
For any , let us define . Assume that and satisfy that for every positive integer . Then, for any positive real number there exist near , near , and near that provides an odd -periodic solution of the reduced -body problem with initial conditions described in Theorem 1.1.
Proof.
For fixed values of , let , be the solutions of (2.1)-(2.2) evaluated at . By Lemma 2.2 it follows that if for some and we have that
then and are odd and even functions respectively and both functions are periodic with period . An easy computation shows that
From here we can deduce the following
-
a)
For all we can express as
(3.1) with some smooth function. Therefore, an easy a direct computation shows that . Moreover, for all it follows
-
b)
If , we have that and solves (2.1). Therefore,
The path , more precisely, the pseudo periodic solutions of the -body problem induced by the equations , can be viewed geometrically as the pseudo periodic solutions where of the -bodies move along part of a circle and the -body stays put in the center. From this collection we will find a bifurcation point, a particular value for , that will provide the nontrivial periodic solutions.
The previous observations suggest to study the solutions of the system
| (3.2) |
To this end we will use relation (3.1) to compute derivatives of and . Recall that
| (3.3) | |||||
| (3.4) |
where . Taking the partial derivative with respect to on both sides of Equation (3.3) and evaluating at give us that satisfies
Therefore,
| (3.5) |
The equation above shows that, if
| (3.6) |
then
In consequence, from and it follows that satisfies
Now, we take the derivative with respect to on both sides of Equation (3.4) and evaluate at . Then satisfies
therefore
From this last expression we deduce
Applying the same ideas, the function can be obtained by solving
therefore
for all Further, from (3.4) we can deduce that for all These computations shows that the gradient of the function at is given by
| (3.8) |
Notice that our condition of guarantees that does not vanish. On the other hand, using and the equation (3.7) we obtain
| (3.9) |
Since
has its second entry different from zero, by the Implicit Function Theorem there exists and a pair of continuous functions such that
with , , such that
with given by
| (3.10) |
Therefore, for each it follows
In consequence, using Lemma 2.2 we get that for any , the functions y define a -periodic solution of the reduced problem (2.1).
∎
Theorem 3.2.
For any , let us define . Assume that and satisfy that for every positive even integer . Then, for any positive real number there exist near , near and near that provides an ood/even -periodic solution of the reduced -body problem with initial conditions described in Theorem 1.1.
Proof.
We follows the same lines of the proof of Theorem 3.1, but now considering consider the system
| (3.11) |
By (3.1) there exists a function such that
for all In particular
for all . Now we search for points such that
Once again, with the aim of applying the Implicit Function Theorem we consider the gradiente vector and . A direct computation shows that
Notice that the second entry of above vector is given by
which by hypothesis is different from zero. Then, there exist and two continuous functions such that
with , and
with
| (3.12) |
Then for it follows
3.2. Periodic solutions for the -body problem
We will only consider the case when the solutions of the -body problem comes from solutions of Equation . The case when the solutions of the -body problem come from solutions of equation is similar.
In order to show that we can find a non trivial periodic solution with we just need to check that the function is not constant along the curve defined in Equation (3.10). This is true because every triple solves the equation and and by continuity, if is not constant, then we can find a such that satisfies that with and integers. See Remark 2.1.
One way to study the behavior of the function along the curve is by reparametrizing the curve as where is an integral curve of the vector field defined as
As we have done before, we can explicitly compute as many partial derivatives of the functions and at the bifurcation point . Therefore we can compute as many derivatives as needed for the curve at and since we can also compute as many partial derivatives of the function at then using the chain rule we can compute the first and second derivative of the function
at . A direct computation shows that and a long direct computation, see [16], shows that
with and given by
Which implies that for most of the choices of , and the second derivative of at is different from zero.
4. Numerical solutions
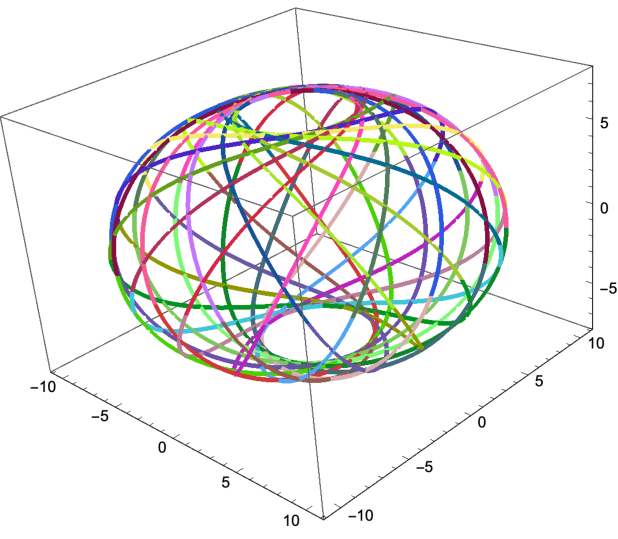
In this section we present the analytic continuation of a periodic solution that is close to the solution displayed in the youtube video http://youtu.be/2Wpv6vpOxXk. It can be checked that , , , and
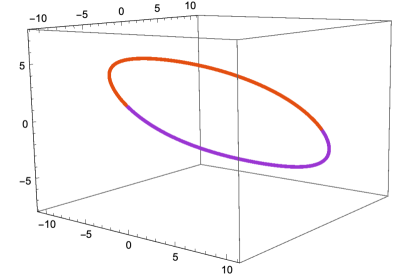
provides a periodic solution. Figure 4.1 shows the trajectory of one of the three bodies with mass 92.
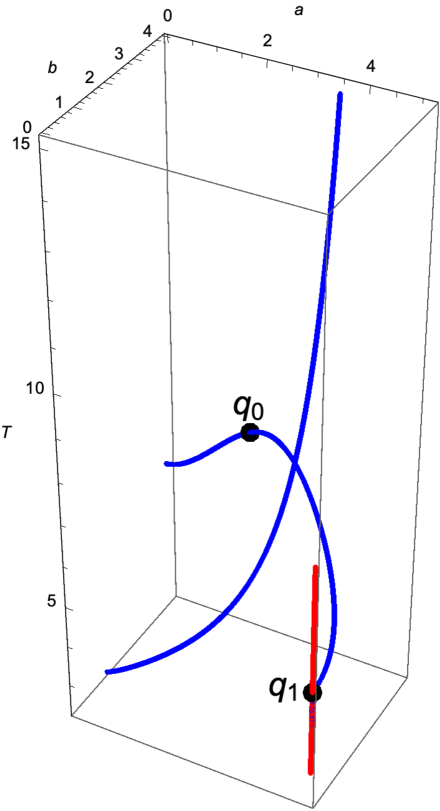
When we extend this solution, similar to the results in [13], the collection of points that satisfy the equations and with have the shape of a fork, where two of the edges goes to a points with corresponding to periodic solutions with collisions, the other edge seems to be unbounded and the fourth edge goes to a point where . The value of for this limit point with is which was somehow expected because this is the corresponding to the solution where the mass in the center stays put and the other masses move along a circle. The value of for this limit point is near 5.03224. In other words the limit point with that we found by analytic continuation of the periodic solution displayed in the video is
Figure 4.2 shows the points and as part of the family of reduced periodic solutions of the 4-body problem. This paper comes from an effort to understand the reason of the value of in the point above. Initially we were expecting a value for equal to which is half of the period of the circular solution where the mass in the center stays still. The result of this explanation is Theorem 3.1, it explain how actually this limit point is a bifurcation of the solutions coming from the line
which even though they do not provide geometric periodic solutions, they satisfy the equation and . Our main theorem predicts the value of bifurcation for at which completely explains our numerically value of in the point . Figure 4.2 shows the solutions with that form a fork shape curve and the solution with , the line defined above. It is worth pointing out that this line is the image of the curve that we used in the proof of the main results of this paper.
Just to give an application to our Theorem 3.1, we decided to consider periodic solutions of the 4-body problem produced when , and . According to Theorem 3.1, when we consider the system
| (4.1) |
it follows that, along the line of solutions of this system
there is a bifurcation at
In order to find a non trivial solution near , we took and we did a search by doing small changes of and to solve the system (4.1). We found that the point
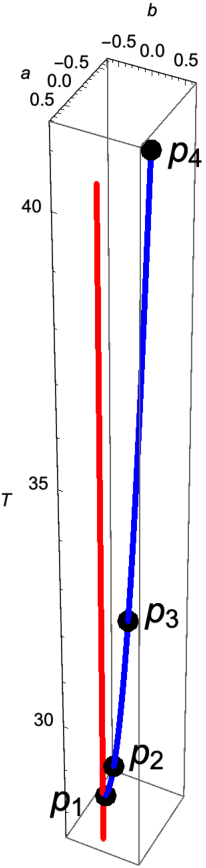
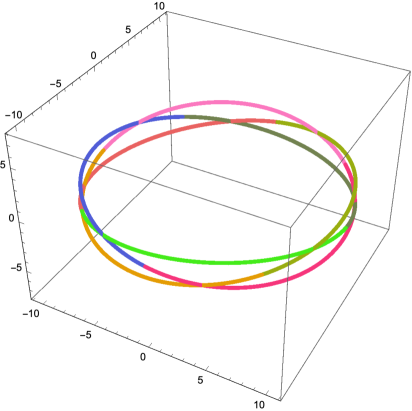
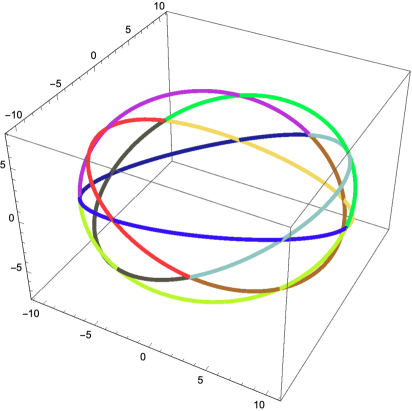
Satisfies that and are smaller than . Using the point we did an analytic continuation to obtain solutions of the system (4.1) with . Figure 4.3 shows about 12,000 solutions found numerically, along with the solutions along the line .
We can compute the exact value for , it is . We also have that , this time the computation has to be done numerically.
Since the function along the solutions of the system (4.1) changes, by continuity we have that for some solution of the system with and whole numbers. Therefore we get that the functions
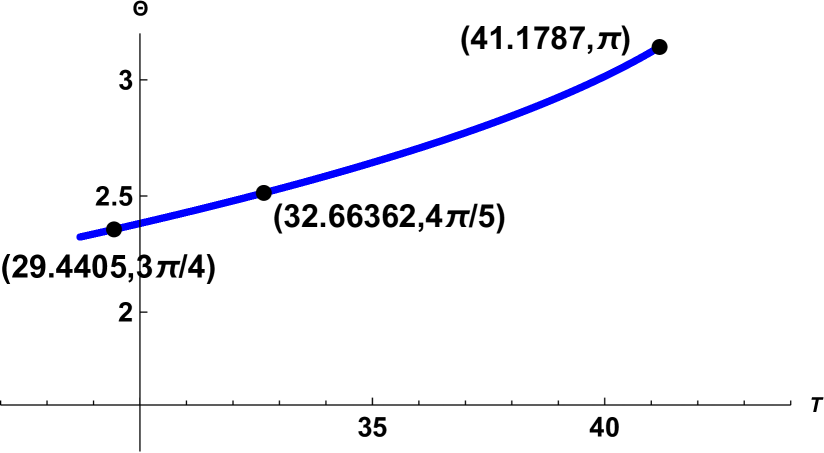
will eventually close and therefore the solution of the -body problem given by these functions will be, not only pseudo periodic, but periodic. We have noticed that along the branch of solutions of the system (4.1) with (see Figure 4.3), is a function of , see Figure 4.4. After noticing that the values of increase up to numbers bigger that , we searched for the solutions that satisfy , and . We found that the points
satisfy that , , and . Figure 4.5 shows the image of the function for these three solutions , and .
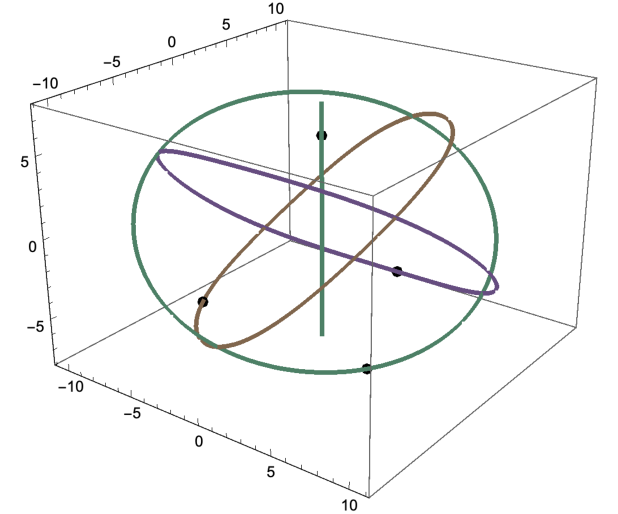
For the periodic solution given by the solution , Figure 4.6 shows the image of the functions , , and .
References
- [1] Corbera, M. & LLibre, J. (2000) Families of periodic orbits for the spatial isosceles -body problem. Siam J. Math. Anal. 35. No 5, 1311-1346.
- [2] Devaney, R. Triple collision in the planar isosceles three-body problem. Inventions Math 60 (1980) pp. 249-267
- [3] Galán, J., Núñez D. & Rivera, A. (2018) Quantitative stability of certain periodic solutions in the Sitnikov problem. Siam J. Applied Dynamical Systems. 17 No 1, 52-77.
- [4] Hénon, H. A family of periodic solutions of the planar three-body problem, and their stability. Celestial Mechanics 13 (1976) pp. 267-285
- [5] Martinez, R. & Simo, C. [1987] Qualitative study of the planar isosceles three-body problem. Celestial Mechanics 41, (1987), pp 179-251.
- [6] McGehee, R. [1974] Triple collision in the collinear three-body problem. Inventions Math. 27, (1974), pp 191-227.
- [7] Meyer, K. & Wang, Q. [1995] The global phase structure of the three-dimensional isosceles three-body problem with zero energy, in Hamiltonian Dynamical Systems (Cincinnati, OH, 1992). IMA Vol. Math. Appl. 63, Springer-Verlag, New York, 1995, pp 265-282.
- [8] Meyer, K. & Schmidt, D [1993] Libration of central configurations and braided saturn rings. Celestial Mechanics and Dynamical Astronomy 55: 289-303.
- [9] Offin, D. & Cabral, H. Hyperbolicity for symmetric periodic orbits in the isosceles three body problem. Discrete and continuous dynamical systems series S. 2 No 2 (2009), 379-392
- [10] Ortega, R. & Rivera, A. Global bifurcation from the center of mass in the sitnikov problem. Discrete and continuous dynamical systems series B. 14 No 2 (2010), 719-732.
- [11] Perdomo [2014] A family of solution of the n body problem. http://arxiv.org/pdf/1507.01100.pdf
- [12] Perdomo A small variation of the Taylor method and periodic solution of the 3-body problem. http://arxiv.org/pdf/1410.1757.pdf
- [13] Perdomo Bifurcation in the Family of Periodic Orbits for the Spatial Isosceles 3 Body Problem Qual. Theory Dyn. Syst. (2017). https://doi.org/10.1007/s12346-017-0244-1.
- [14] Perdomo (2019) The round Taylor Method The American Mathematical Monthly (2019). 126:3, 237-251, DOI: 10.1080/00029890.2019.1546087
- [15] Rivera, A. (2013)Periodic solutions in the generalized Sitnikov -body problem. Siam J. Applied Dynamical Systems. 12 No 3, 1515-1540.
- [16] Suárez, Johann. (2020) Sobre la existencia de soluciones periódicas en el problema de -cuerpos polygonal. Ph.D. Thesis. Universidad del Valle, Cali-Colombia. 2020.
- [17] Xia, Z. The Existence of Noncollision Singularities in Newtonian Systems. Annals of Mathematics (1992), 135, 411-468.
- [18] Yan, D., Ouyang, T. New phenomenons in the spatial isosceles three-body problem. Internet. J. Bifur. Chaos Appl. Sci. Engrg. 25, (2015), 9, 15p