Comfortability of quantum walks on embedded graphs on surfaces
Abstract.
In this paper, a quantum walk model which reflects the underlying embedding on the surface is proposed. We obtain the scattering matrix of this quantum walk model characterized by the faces on the surface, and find a detection of the orientablility of the underlying embedding by the scattering information.
The comfortability is the square norm of the stationary state restricted to the internal and reflected by the underlying embedding.
We find that quantum walker feels more comfortable to a surface with small genus in some natural setting.
Key words and phrases.
Discrete-time quantum walk, graph embedding on closed surfaces, stationary state, scattering matrix, comfortability
1 Introduction
How is the underlying geometric structure estimated by a reaction to an input? To tackle this inverse problem, we adopt a discrete-time quantum walk model, and try to extract a topological structure of graphs from the behavior of the quantum superposition. Among a lot of discrete-time quantum walk models [11], the Grover walk [19] may come to mind first. In fact, using the commutativity of the Grover matrix with any permutation matrix, the time evolution of the Grover walk is easily constructed [12], which exhibits interesting behaviors [9, 10] and also plays the key roles in the quantum search [17]. Moreover there are several important properties in the Grover walk connecting to not only a random walk[QCcoupling2, 2] but also the stationary Shrödinger equation [7].
Here, let us first apply the Grover walk as a discrete-time quantum walk model and focus on the embedding of graphs on surfaces as a geometric structure. For example, the complete graph with vertices has kinds of embedding way; see Figure 7. We expect that the quantum walk “feels” these underlying embeddings. Grover walk may decide whether an underlying graph admits a topological embedding on a given surface [3]. On the other hand, the time evolution of Grover walk depends only on the adjacent structure of the underlying graph because the time evolution operator acts as
for any standard base labeled by an arc of the underlying graph. Here and are origin and terminal vertices of the arc , and is the degree of the vertex . Then the weights associated with transmitting and reflecting at vertex are and in the Grover walk, which is independent of the underlying embedding. Therefore the Grover walk can not distinguish any two embedded surfaces of a graph. Thus for our object, we need to propose another kind of discrete-time quantum walk model for this problem.
To this end, let us introduce the idea of the drawing a graph without crossings of edges and extra faces on some closed surface, which is called the two-cell embedding [6, 14, 15]. More details are given in Section 3. See also Figures 5, 6 and 7. It is well known that the two-cell embedding on a closed surface of a graph is realized by the rotation system [6, 14, 15]. Here and are the set of vertices and the set ofunoriented edges. The rotation system is the triple of the symmetric digraph , the rotation and the twist , where is the set of the symmetric arcs induced by . Here the rotation is decomposed into cyclic permutations with respect to the incoming arcs of each vertex. Thus our target can be switched to how a quantum walk model is constructed for given rotation system .
In this paper, the abstract graph is deformed so that information of are reflected and also the in- and out- degrees are equally . The regularity of the degree derives from the implementation by some optical polarizers elements [13]. See Sections 4.1, 4.2 for more detailed construction and also Figure 8. Such a new graph is obtained by replacing each vertex of the double covering graph [6, 14] induced by with a directed cycle induced by . The replaced directed cycles are called islands, and the symmetric arcs between the islands, which reflects the original adjacent relation, are called the bridges. The tails, which are semi-infinite paths, are inserted into all the island arcs. Such an assignment of tails is called the hedgehog; see Figure 8 (d). Let us explain the time evolution below; see Sections 4.3 and 4.4 for more detail. The degree- regularity of the new graph makes it possible that the one-step time evolution on the whole space can be described by the local scattering at each vertex of the internal graph by the unitary matrix
Here are the complex valued weights associated with moving of a quantum walk for one step “from an island to the same island”, “ a bridge to an island”, “an island to a bridge” and “a bridge to the inverse bridge”, respectively. This unitarity of the local coin matrix includes also the unitarty of the total time evolution operator. On the other hand, we set that the dynamics on the tail is free; see (4.16) for the detailed dynamics of the free. The initial state is set so that the internal graph receives the constant inflow at every time step. If a quantum walker goes out to the external, it never come back to the internal because of the free dynamics of the tails. Such a quantum walker can be regarded as the outflow. By the balance between the in- and out- flows, this quantum walk model converges to a fixed point in the long time limit [4, 5, 8].
Now, for a fixed abstract graph , let us vary the embedding that underlies it.
For every and , set as the stationary state and as the restriction of to the internal graph .
In this paper, we focus on extracting embedding structures of a graph from the stationary state of this quantum walk model.
To this end, we divide the stationary state into external and internal parts; we characterize the external part by the scattering matrix, which shows a reaction of the internal graph to an input at the tails, while the internal part by the comfortability, which is corresponding to the energy in the internal graph.
We estimate how quantum walker
(i) gives a scattering on the underlying embedding by finding the expression of the scattering matrix
where is independent of inflow and outflow and a unitary operator [4, 5], and
(ii) feels comfortable to the embedding by defining
that is, the larger is, the more comfortable quantum walker feels to the underlying embedding.
Throughout this paper, in addition to the hedgehog tail condition, we subject the following assumption (2).
Assumption 1.
-
(1)
the assignment of tails is the hedgehog;
-
(2)
the element of is a real number.
Under such a construction of the quantum walk reflecting the underlying embedding on a closed surface, in this paper, now we are ready to state our main result on the scattering and comfortablity.
Theorem 1.1 (Scattering).
Assume and set and the hedgehog assignment of tails. Let be the set of faces induced by the rotation system . The scattering matrix is decomposed into the following unitary matrices as follows:
where
Here the operators induced by each face , is the identity operator and are defined in (6.26).
Theorem 6.1 in Section 6 gives the scattering matrix in a more general setting. The operator is a weighted permutation matrix induced by the closed walk along the boudary of the face , which is called the facial walk of . The rotation system determines the set of faces and gives uniquely orientation of the closed walk along the boundary of the face . This closed walk corresponds to the facial walk, which is expressed by a sequence of arcs, and we simply write for this closed walk. We should remark for , where is the inverse direction of . The weight is determined by each edge type which is passed through the facial walk. Then using this property of the scattering matrix, the detection of the orientability by the scattering information is proposed in Theorem 6.2.
Theorem 1.2 (Comfortability).
Let and be the abstract symmetric digraph and its rotation system. Let be the set of faces determined by the rotation system . Pick a tail at random from the hedgehog tails as an input. Under Assumption 1 with and , the average of the comfortability with respect to a randomly chosen input is expressed by
| (1.1) |
Here is the set of self-intersection of the face ; where if a facial walk passes through an arc and also its inverse , then the face is said to have a self-intersection at the unoriented boundary edge .
Thus, the larger the first term, the more comfortable the quantum walker feels, while the larger the second term, the more uncomfortable it feels. The first term is related to an integer partition of , while the second term is related to the self-intersections of faces. See Figure 4 for the self-intersection. Figure 2 shows the ranking of the comfortability of the embeddings for the complete graph with . We discuss the messages of combinatorial structures from Theorem 1.2 in Section 2.
This paper is organized as follows. Section 2 is devoted to how geometric and combinatorial information of the graph embeddings is extracted from Theorem 1.2 as its corollaries. We show the best and worst embedding of the complete graph for quantum walker and also characterize the comfortability on the island by the Young diagram. In section 3, we give a short review on the graph embeddings on the orientable/non-orientable surfaces. In section 4, the time evolution of the quantum walk induced by the rotation system is discussed. In section 5, we show the unitary equivalence of the time evolutions between the isomorphic embeddings. In section 6, we find that the scattering matrix is characterized by the resulting faces and described by direct sum of unitary and circurant matrices. Moreover a detection method of the orientability by using the scattering information is proved. In section 7, we give the proof of Theorem 1.2.


2 Combinatorial observations (corollaries of Theorem 1.2)
In this section, we discuss how more detailed geometric information is extracted from Theorem 1.2.
2.1 Observation 1: In the limit of
It is easy to observe that if , then the comfortability converges to , which is completely independent of . It also confirms the consistency by considering that if , a walker is forced to trace a route “ tailislandbridgeislandtail” by the definition of this quantum walk.
On the other hand, if , then the comfortability diverges. Then, taking , we will find the appropriate scaling with respect to , and its coefficient of the first order hoping that we will find some geometric information in the coefficient. Indeed, we obtain the following.
Corollary 2.1.
Let be a connected abstract graph with the vertex set and the edge set . Let be the rotation system with the face set . Under Assumption 1 with , the average of the comfortability with respect to the randomly chosen initial state is expressed by
| (2.2) |
The small genus increases the number of faces, while large genus induces longer faces and, therefore, larger number of intersections. Thus for , quantum walker feels more comfortable to the surface with a smaller genus. In particular, the single-face embedding on an orientable surface attains the above comfortablity . Figure 2 shows the ranking of the comfortability for following Corollary 2.1.
Proof.
Example: The best and worst embeddings of for quantum walker.
For a fixed abstract graph, if the underlying embedding gives the most comfortability in all the possible embeddings of the graph, then it is called the best embedding of the graph, while if it gives the least comfortability, then it is called the worst embedding of the graph.
Let us find the best and worst embeddings of the complete graph by using the following famous graph theoretical facts.
Fact 1 (Minimal and maximal genera of ).
By combining Corollary 2.1 with Fact 1, the most comfortable underlying embedding of for quantum walker can be chractorized as follows.
Corollary 2.2.
Under the setting of Corollary 2.1, the best and worst embeddings of the complete graph for the comfortability of quantum walker must be on the closed surfaces with the minimal and maximal genus, respectively, whose orientability are divided into cases of as follows.
-
(1)
case:
-
•
The best embedding: any non-orientable surface
-
•
The worst embedding: any orientable surface
-
•
-
(2)
and case:
-
•
The best embedding: any orientable and non-orientable surfaces
-
•
The worst embedding: a non-orientable surface
-
•
-
(3)
case:
-
•
The best embedding: any orientable surface
-
•
The worst embedding: a non-orientable surface
-
•
The best and worst surfaces of for quantum walker is described in the following Table.
| , | |||
|---|---|---|---|
| Best | Non-ori | Ori and Non-ori | Ori |
| Worst | Ori | Non-ori | Non-ori |
Proof.
Let us find that the best embedding and the worst embedding of for quantum walker as follows.
-
(1)
Best: The expression (2.2) tells us that the large number of faces (the first term) and small number of self-intersection (the second term) makes quantum walker feel comfortable. Thus we expect that the small genus embedding will be the best embedding because the small genus accomplishes both of them.
First let us estimate the number of faces for the minimum genus embedding. Combining Fact 1 with the Eular formula
we have
(2.4) Secondly, let us check whether the minimal genus embedding has a self-intersection. In the following, let us confirm that
there are no intersections in the minimum genus embeddings on both “non-orientanble surfaces” and “orienable surfaces except ”.
Put , and as the numbers of vertices, edges and faces for the resulting embbeding of , respectively. Assume that there is a face having a self-intersection in an embedding of . Note that the boundary length of a face having a self-intersection must be at least . Then the following inequality holds.
(2.5) -
(a)
Non-orientable case: Let be the genus of the underlying closed surface of the embedding having self-intersections. By the Euler formula and (2.5), we have
(2.6) This inequality is equivalent to
which implies
(2.7) and the embeddings on the non-orientable surfaces with the minimal genus has no self-intersections. Then the second term of (2.2) for the minimal genus embedding on the non-orientable surface is reduced to .
-
(b)
Orientable case: By the Euler formula for the orientable case, by replacing with in (2.6),
(2.8) which is equivalent to
Then we have
(2.9) except . Thus it is ensured that there are no interactions in the minimum genus embedding except . So the second term of (2.2) for the minimal genus embedding on the orientable surface is reduced to except .
Thus combining (2.4) with (2.7) and (2.9), we obtain that the best embedding of the comfortability is the minimum genus embedding on
(2.10) -
(a)
-
(2)
Worst: The expression (2.2) tells us that the small number of faces (the first term) and large number of self-intersection (the second term) makes quantum walker feel uncomfortable. Thus we expect that the large genus embedding will be the worst embedding because the large genus accomplishes both of them.
The number of faces of the maximal genus of orientable and non-orientable surfaces are
respectively.
-
(a)
case: If the underlying surface is orientable, then there is only one face and every boundary face has the self-intersection, which means that comfortability is reduced to by (2.2). On the other hand, if the underlying surface is non-orientable, then there must exists at least one edge having no self-intersection in the face, which implies that the comfortability is non-zero by (2.2). Thus we have the worst embedding is the maximal genus embedding on the orientable surface.
-
(b)
case: If the underlying surface is orientable, then the number of faces is . Then the boundary edges of the two faces have no self-intersections. If a twist is inserted into one of the edges of the boundary edges so called the edge twisted surgery [6, 14], then the two faces are merged into a single face conserving the self intersected edges and the resulting surface becomes non-orientable. Then this single-face embedding on the non-orientable surface is worse than the embedding with double-face on the orientable surface.
The worst embedding of the comfortability is the maximal genus embedding on
(2.11) -
(a)
2.2 Observation 2: Comfortability on the island.
It is shown in the proof of Theorem 7.1 that the comfortability on the island is proportional to the first term of (1.1). Then let us estimate the first term of (1.1) by using some combinatorial method.
Set
Let , with be the set of the underlying faces, where . Then the first term of (1.1) in Theorem 1.2 can be reexpressed by
Note that . Then the boundary lenghts of give the integer partition, which is bijective to the Young diagram.
Thus in the following, let us consider what is the integer partition makes the first term larger.
Let us the important properties of for the above consideration be summarised below.
Properties of :
-
(1)
For ,
-
(2)
For () with and , then
For with , we subject the condition because the length of face is larger than . For such a Young diagram , let us put by
We call it the island of the energy. Define the partially order by if and only if . By property (1), large length of the Young diagram makes large. By property (2), bias of sizes of rows also makes large. Thus for any Young diagram , we have
Then we immediately obtain the following corollary.
Corollary 2.3.
Let be a connected abstract graph. If there is a triangulation in the embeddings of , then that is one of the best embeddings for quantum walker.
Proof.
If there is a triangulation in the embeddings, then that is the most comfortable on the island. Moreover since there is no self-intersections in the triangulation, then that is the most comfortable embedding by Corollary 2.1. ∎
If , the minimum genus embedding of becomes the triangulation, because holds by Fact 1. Then we can see that Corollary 2.3 is consistent with Corollary 2.2 for .
Example: The Hasse diagram in Fig. 3 describes the case for by only using the properties of , (1) and (2).

This Hasse diagram shows the partial order of the comfortability restricted to the islands for ’s embeddings. In this Hasse diagraph, the order of the Young diagram and are not determined by only using the properties (1) and (2) of . However it is possible to estimate the difference between the comfortabilities on the island to and in the Hasse diagram of Fig 3, and as follows:
Here all the inequalities derive from the property (1) of . On the other hand,
Here the first and second inequalities derive from the property (2) and (1), respectively. Then we have
In the statement of Corollary 2.1, the comfortability of is greater than that of (see Figure 2), while these are the same by in the Hasse diagram of Fig. 3 on the island. The difference derives from the number of intersections; there are points of the intersection in the enneagon for while there is only point of the intersection in the enneagon for . See Figure 4. The same reason can be applied to the case for and . Therefore the non-orientability reduces the self-intersection and increases the comfortability.

3 Quick review on the rotation system
In this section, we give a quick review on the rotation system following [6, 14], which will be important to construct our quantum walk model.
Abstract graph.
Let be a symmetric digraph with the set of the vertices and the set of the symmetric arcs , that is, if and only if , where is the inverse arc of .
In this paper, we assume there is no multiple arcs. Then an arc is sometimes represented by to emphasize the origin and terminal vertices.
The support edge of is denoted by .
The set of edges (which are undirected) is defined by .
For each arc ,
the terminus and origin vertices are denoted by and .
The arc with , is also represented by .
Let be the set of arcs whose terminal vertices are , that is,
.
Rotation. A cyclic permutation on a countable set is a bijection map such that for any . On each vertex , a cyclic permutation on , , is assigned. The extension of to the whole arc set is given by
The rotation on the symmetric arc set is defined by
Twist.
The designation for the twist of each edge is a map such that for any . If , the edge is called type-, otherwise, called type-. The type- edge is regarded as twisted.
Rotation system. The triple is called the rotation system of . alone is sometimes called an abstract graph. Let be the transposition such that for any . A facial walk induced by the rotation system is the representative of the sequences of arcs identified by cyclic permutation and inverse
with some natural number such that
| (3.12) |
for in modulus of . See Figure 5 for a rotation system of and its facial walks. The set of facial walks is denoted by . Every gives the boundary of each face of the resulting two-cell embedding of the closed surface. Indeed, it is very starting point for our paper that the orientation system determines the embedding on a closed surface in the following meaning.
Theorem 3.1 ([6, 14, 15]).
Every rotation system on graph defines (up to equivalence of embeddings) a unique locally oriented graph embedding. Conversely, every locally oriented graph embedding defines a rotation system for .
The Eular’s formula gives the genus of the undelying embedding:
The graph contains a cycle which has odd number of type- edges if and only if the underlying surface is non-orientable.
The following method is useful to detect the orientability of the underlying surface[6, 14]. See also Figure 6:
Operation.
-
i.
Choose an arbitrary spanning tree of ;
-
ii.
Choose a arbitrary vertex of ; is called the root;
-
iii.
For any vertex which is adjacent to with the type- edge, say , the orientation is reversed from to and for any edge incident to in , say , the type is reversed from to ;
-
iv.
Continue this process until all the types of edges in the tree are type-;
-
v.
The surface is non-orientable if and only if there exists a type- edge in after the above updated orientation system.
The following remark will play an important role in the construction of our quantum walk model.
Remark 3.1.
For any closed walk on , the operation iii preserves the value of , which ensures that the underlying embedding is preserved by this operation iii.
After the underlying closed surface is determined by the above procedures, for every vertex , we first arrange a vertex and its “half” edges connecting to clockwise according to the rotation on the surface. Secondly, if and are connected in , then connect the corresponding half-edges each other without any crossing of edges so that the type of edge is conserved. See Figure 7.


4 Construction of quantum walk on the rotation system
On the graph embedded on a closed surface, when a walker passes through a twisted edge, the rotation of the endpoint vertex is reversed. To reflect the parity of the “sheet”, that is, front/back, in the dynamics of our quantum walk, let us prepare the following notions.
4.1 Double covering
The rotation system is called the chiral rotation system of . To realize the parity and the rotation in the dynamics of the quantum walk model we first prepare the two rotation systems which are chiral to each other and secondly join them by rewiring the twisted edges to the corresponding chiral vertices so that the original and its chiral rotations are conserved.
More precisely, let us first set the double covering graph which is realized by the voltage assignment of as follows. See also Figure 8 (b).
-
(1)
The vertex set : , where .
-
(2)
The arc set : and are adjacent each other in if and only if and are adjacent in and .
Secondly, to reproduce the rotation , the rotation is assigned to , while the inverse rotation is assigned to . Such a resulting rotation system is called the double covering of , which coincides with the rotation system .
It is possible to draw the abstract graph in the following way:
| () | is placed in the “left” | ||
| while is placed in the “right”. |
We call the regions of the subgraphs in the left and right, the front and back sheets, respectively. Note that every vertex in the front (resp. back) sheet follows the rotation (resp. ), respectively. Every arc crossing the boundary of the sheets satisfies and . See Figure 8 (b).
Lemma 4.1.
Under the drawing () of , Operation iii to a vertex in is equivalent to pulling and its chiral to their opposite sheets crossing the boundary and conserving the locations of the other vertices of , and switching the labeling of each vertex.
Proof.
Note that the situation of a vertex with its connected edges in is equivalent to the situation in the drawing () of that all the edges of and its chiral edges of with are in the front sheet and back sheet, respectively, while all the edges with cross the boundary. The operation iii. to a vertex switches the rotation and types of all its incoming and outgoing arcs. Then in the situation of with the drawing (), the vertex and its chiral vertex are pulled to the opposite sheets conserving the locations of the other vertices. After this switching, the resulting drawing of , the rotations of and , and also the types of all the connected arcs are switched. ∎
Proposition 4.1.
The rotation system is non-orientable if and only if is connected.
Proof.
Every orientable rotation system can be drawn without any twisted edges, , by Operation i–iv. The rotation system is orientable and the corresponding double covering graph is constructed by the two connected components, that is, disconnected because there are no type- edges. The operation reversing the rotation of a vertex and the types of its connected edges keeps the disconnectivity of the double covering graph by the previous lemma. ∎
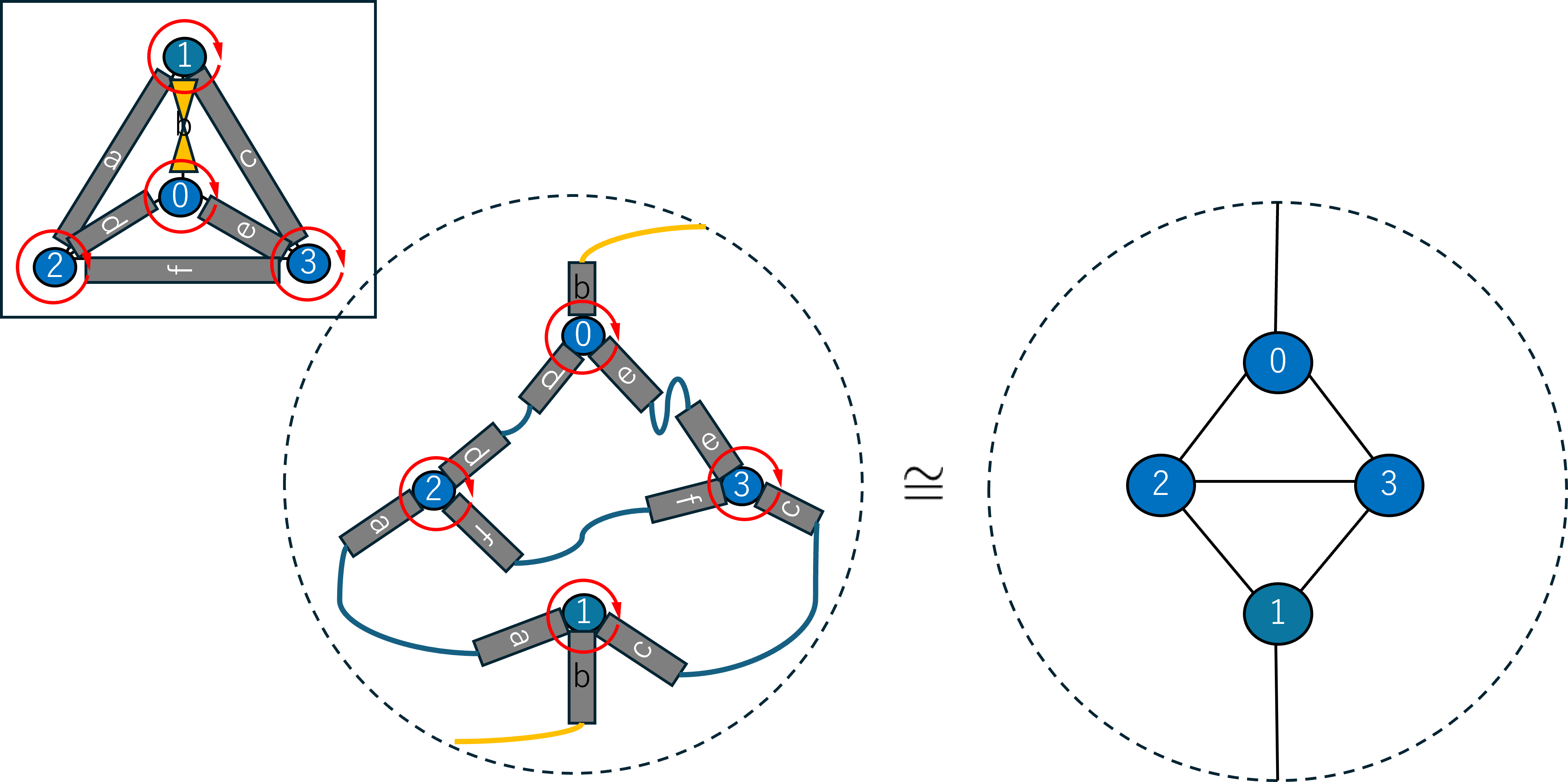
4.2 Blow-up
The blow up graph of with the rotation is obtained by replacing each vertex of into the directed cycle following the rotation assigned to each vertex and conserving the adjacency relation of the original graph as follows. The vertex set of the blow up graph is denoted by
the arc set of the blow up graph is denoted by the disjoint union of
which are called the bridge and the island, respectively. Here the “bridge” and the “island” are both isomorphic to and denoted by
See Figure 8 (c).
Let us give some remarks and introduce some new notations which will be important to describe the time evolution of our quantum walk model.
Remark 4.1.
It holds that for with in ,
We call the above directed cycle induced by the island of which is denoted by . On the other hand, for with the end vertices in , and , where , are called the bridge between the islands and . Then let us define
for an island arc , and
for a bridge arc .
Remark 4.2.
The in-degree and out-degree for every vertex of the blow-up graph are equally .
For each vertex , the incoming arcs to come from the vertex along the island of and the vertex along the bridge between the islands and while the outgoing arcs to go out to the vertex along the island of and the vertex along the bridge between the islands and .
Then for any island arc , there are exactly two bridge arcs and such that and , respectively. Such bridge arcs for the island arc are denoted by
respectively. On the other hand, for any bridge arc , there is exactly two island arcs and such that . Such island arcs for the bridge arc are denoted by
respectively.

4.3 Quantum walk on the rotation system
For given the rotation system , let us consider the blow up graph of induced by the rotation by replacing discussed in the previous subsection 4.2 with discussed also in subsection 4.1. This blow up graph is denoted by . Note that .
Now we are ready to describe the dynamics of this quantum walk model. The total state space of our quantum walk is given by the vector space
In our quantum walk model, a local time evolution at each vertex of is represented by a -dimensional unitary matrix, because the degree of the blow up graph is , and if a quantum walk passes through the twisted bridge, the phase of the quantum walker is converted by .
In the following, we represent this dynamics of our quantum walk model in more precisely. Let be the unitary time evolution operator such that for each time step , the total state of the quantum walk at time , , is given by
with some initial state . The unitary time evolution operator is defined as follows.
Definition 4.1.
Let us set a unitary matrix by
For any island arc , bridge arc , the time evolution operator is defined by
| (4.13) | ||||
| (4.14) |
for any .
Remark 4.3.
For any bridge arc , the local time evolution on the vertex is described by
| (4.15) |
4.4 Extension to an infinite system
For the blow-up graph , let us choose a subset of by as the boundary to the “outside”. We deform this blow-up graph to an infinite graph by the following procedure.
-
(1)
Every is left as it is without any transformations.
-
(2)
Each is divided by two arcs by replacing with two new arcs and satisfying with , and .
-
(3)
Semi-infinite path with the root vertex is joined by identifying with . The pair of is called the quay of . The sets of such as and are denoted by and , respectively.
The resulting graph is denoted by , which is an infinite graph. See Figure 8 (d). The set of boundary vertices of is defined by
The set of arcs of tails is denoted by . The subset of called the pier is denoted by
Note that for each island having a boundary vertex, the local rotation in is “expanded” by the insertion of the tail. Let us use the same notation for the new rotation as to reduce the number of notations.
Let be the set of the islands of following the rotation .
Let be the union of and .
The designation of the twist to is assigned by .
The total state space here is extended to
The time evolution operator on is given as follows, which is essentially the same as Definition 4.1 except the boundaries and the tails but the setting of the initial state is crucial to obtain the stationary state:
Definition 4.2.
Let be the -th iteration of , such that
with the initial state defined in (4.17).
The time evolution .
-
(1)
For : The arcs of a tail is put by and with . The time evolution on the tail is free, that is,
(4.16) for any .
-
(2)
For : For any island arc , “bridge or pier” arc ,
Here if , the bridge arc is the pier from ; if , the island arc is the quay of the boundary vertex .
The initial state .
Let each tail is labeled by each element of . Prepare the sequence of complex values .
Then we set the following uniformly bounded initial state on the tails:
| (4.17) |
Note that the initial state is bounded but no longer square summable. Such a setting of initial state provides a constant inflow from the tails at very time step. On the other hand, the setting of the time evolution on tails implies an outflow from the interior. Under this setting, the convergence to a fixed point of this quantum walk is ensured in the following meaning:
Proposition 4.2 ([8]).
For any ,
5 Unitary equivalence
Let be a rotation system whose underlying abstract graph is .
Let us deform the rotation system as follows which is corresponding to Operation iii.
Operation ()
Choose a one vertex from , say . Then let us reverse its rotation and switch all the edge types of the incident edges of .
Such a rotation system is denoted by .
By Lemma 4.1, the resulting embeddings on a closed surface of the rotation systems of the double covering graph, and , are isomorphic to each other.
Under these isomorphic two embeddings, we take the blow up and choose the boundary island arcs from and its isomorphic boundary from .
The resulting blow up graphs are denoted by
and , respectively.
Note that they are still isomorphic to each other: under the following bijection for the incident arcs of islands and :
Bijection satisfies the following:
-
(1)
island :
with and in
with and in . -
(2)
bridge :
with and in
with and in
The other arcs are left nothing as it is.
In this section, we show that the time evolution operators on and on are unitarily equivalent. Indeed we have the following proposition.
Proposition 5.1.
Let the rotation system and are isomorphic to each other, and let the boundaries of the induced blow-up graphs are also isomorphic to each other. Then the time evolution operators on and on are unitarily equivalent, that is, there is an unitary map such that
Proof.
It is sufficient to consider the case for for arbitrary . By Lemma 4.1, “the reversing the rotation of ” and “the reversing all the incident edges of ” are reflected in the corresponding time evolution operator on :
-
(1)
Switching the labels of all the arcs associated to and following the bijection ( Reversing the rotation of );
-
(2)
Changing the twist to by
( Reversing all the incident edges of )
Obviously, the operation (1) has the corresponding unitary map. This map is denoted by , that is,
Then in the rest of the discussion, let us find the corresponding unitary map of the operation (2). To this end, for the blow-up graph , set
Note that if we set
| (5.18) |
then for any , where . On the other hand if we set
| (5.19) |
then for any . For , and arbitrary path in , with , we define
A path with , in may be represented by
where and . Here if there is a back-tracking in , a corresponding subsequence of a walk on an island disappears. The inverse path of is defined by
where . The inverse path of for the other cases and with back-trackings case are also defined in the same way.
Lemma 5.1.
Set . If for any close path in , then for any path and with and .
Proof.
It holds that for any path by the definition. Note that is a closed cycle. Then we have
which is the conclusion. ∎
Lemma 5.1 tells us that the value is independent of routes from to . Let us fix a vertex . Since for a path starting from is determined by , we set such a value by , which is well-defined.
Let (resp. ) be the -th iteration of (resp. ) with the twist (resp. ) such that (resp. ). By Remark 4.3, we have
| (5.20) |
for any , where and . Here is defined in (5.18). Now let us set by (5.19). The operation keeps the parity of any cycles passing through the vertex , because with in is changed to
which implies for any cycle in . Let us consider a path with and in . Thus we have
Here with a fixed vertex is well-defined by Lemma 5.1. Inserting them into (5.20), we have
The second equality derives from which gives the commutativity of the second diagonal matrix and in first equality. Therefore introducing the unitary map by
we obtain
∎
Remark 5.1.
For a vertex , define . Then the unitary map is described by
6 Scattering
6.1 The scattering matrix represented by faces
For the blow-up graph , let and such that . The stationary state is denoted by . Let us represent the inflow from the outside by such that
for any , , while the outflow to the outside by such that
for any . The scattering matrix is defined by
which is determined by the rotation system and , and independent of , .
It is shown in [8] that such a matrix exists and is unitary. However its explicit expression is up to the individual setting.
We prepare important graph notions which express the scattering matrix. Let be a facial closed walk of the rotation system with length . The extended facial walk of in is defined by just alternatively inserted corresponding island arcs into each arc of ; (we use the same notation for the extended facial walk by ):
| (6.21) |
where and with
| (6.22) |
for any in the modulus of . Here if , represents the quay arcs . Let be the set of (extended) facial walk passing through a boundary vertex in . For any facial walk , there exists a chiral facial walk defined by going around the opposite direction on the opposite sheet. We introduce the following useful lemma to consider the scattering.
Lemma 6.1.
Assume . Let be the stationary state. Set . For each facial walk of the orientation system represented by a sequence of ,
we have
where if , then , otherwise ; if , then , otherwise .
Proof.
For any bridge arcs , (of course) the vertices and are connected by the bridge arcs and , moreover the island arcs and are connected to , while the island arcs and are connected to . Then the blow up graph has locally a path structure with vertices and “” symmetric arcs. Let us see this fact leads a transfer matrix discussed in the spectral analysis on the discrete-time quantum walks on the one-dimensional lattice and gives the conclusion. Let us set . The point to get the transfer matrix is to align the “subscriptions” for each vector: the local eigenequation is rewritten by
| (6.23) |
where , . Therefore we have
where . Here the second equality is obtained by the properties of the unitarity matrix , for examples, , , . Then if and only if and , which is the desired conclusion. ∎
For a facial walk , set and with in the modulus of . Here . Note that the tails interfere with the facial walk . The tail originating the boundary is denoted by . Put
which are the parity of number of type- edge between and , and the distance between the boundary vertices and along the facial walk . To simplify the notation, let us put . We set the identity matrix, the weighted cyclic permutation matrix on by
| (6.24) |
for any and in the modulus of , respectively. Now we are ready to give the theorem for the scattering:
Theorem 6.1.
Assume and set . The scattering matrix is decomposed into the following unitary matrices as follows:
where
Here the operators induced by each external facial closed walk and are defined in (6.1).
Remark 6.1.
Since is the unitary matrix and , where , then is rewritten by
From this expression, if , we have
Here “” corresponds to the number of boundary vertices where the facial walk passes through from to .
Proof.
Pick up a facial walk , and set and . Here . Note that the tails interfere with the facial walk . The tail originating the boundary is denoted by . Let us give the inflow from the , and consider the outflow to the tail (). Let us see that the element of the scattering matrix can be calculated according to the number of “nights” that a quantum walk stays at the face with the boundary vertices and from the time the quantum walk enters at entrance to the time the quantum walk leaves at exit .
Consider the case for . Let and be the arcs of originating the vertex . Let “the day trip walk” from to be defined by
where
and the “-night walk” from to be defined by
By Lemma 6.1, the weight associated with the moving along the facial walk from to must be in the stationary state. By the local time evolution denoted by the -unitary matrix
the weights associated with moving from the tail to the quay , and from the quay to the tail are and , respectively; the weight associated with moving from to is . Remark that the weight of the closed path starting from and returning back to along the boundary face is since . Then set () as the weight of -night walk in the stationary state by , with
The outflow from is obtained by the superposition of ’s because of the constant inflow at every time step from the tail . Then we have
From the symmetricity of the rotation, we have
| (6.25) |
which leads the conclusion. ∎
Let and be the rotation systems which are isomorphic to each other. Let and be the scattering matrices of those resulting embbedings, respectively.
Proposition 6.1.
Let and be the above. Then we have
where is the diagonal matrix such that
for a face .
Proof.
Proposition 5.1 immediately leads to the conclusion. ∎
Let us consider the case for the following special assignment of the tail, which can be constructed independently of the embedding.
The hedgehog tail assignment: We call the hedgehog tail assignment if
which is the setting of the tails so that a tail is inserted between each vertex in the islands.
6.2 Detection of the orientability
Let us estimate whether the underlying closed surface is orientable or not by observing the outflow of the internal graph to an inflow. The following theorem may be useful for such an estimation.
Theorem 6.2.
Under Assumption 1 with , the underlying surface is orientable if and only if for any with , the signature of the element of scattering matrix
is invariant for any .
Proof.
Since ,
Here with a path satisfying and . Note that Lemma 4.1 implies that is independent of the choice of path if and only if the underlying surface is orientable. ∎
This means that once a vertex is found where there exist different signatures among the outflows from it, then the underlying closed surface must be unorientable.
7 Comfortability (Proof of main theorem)
In this section, we subject to Assumption 1. Note that because of the hedgehog boundary condition, the set of tails has a bijection map to the set of bridges. Then for a bridge arc , put . Let us set by
Here the matrix represents the scattering after a quantum walker penetrates the interior at least once. By using the notation of such a scattering, the stationary state is expressed as follows.
Lemma 7.1.
Under Assumption 1, for any bridge arc ,
For a facial walk ,
the stationary state at the island arc is
for any .
Proof.
Let be the flip-flop matrix such that
for any and , and set by
Here the scattering matrix is regarded as the operator on with the bijection map by for any (: note that the boundary is the hedgehog). By using the expression of the stationary state in Lemma 7.1, the comfortability is described as follows.
Lemma 7.2.
Under Assumption 1, the comfortability with the inflow is described by
Proof.
The comfortability is decomposed into
Here and .
-
(1)
Island: Since every island arc belongs to unique facial walk, can be further decomposed into each facial walk by
where . By Lemma 7.1, the comfortability on the island is deformed by
Then we have
(7.30) -
(2)
Bridge: By Lemma 7.1, we have
(7.31)
Combining (7.30) with (7.31), we obtain the desired conclusion. ∎
Now let us set the inflow inserting from a tail which is chosen uniformly at random, that is, an inflow is selected randomly from
Each probability that () is . We are interested in the average of the comfortability with respect to this randomly setting of the inflow, that is,
where is the comfortability with the inflow . The average of the comfortability is expressed as follows.
Theorem 7.1.
Under the Assumption 1 and the uniformly at random inflow, the average of the comfortability is expressed by
Here is the length of the facial walk in and is the distance from to along the facial walk in for any .
Proof.
By Lemma 7.2, it holds that
Now to describe the above RHS more explicitly, let us compute as follows. Note that , and for each with , can be expanded by
since . Then we have
| (7.33) |
Here is reduced to
Inserting the above expression for into (7.33), we obtain
| (7.34) |
By using (7.34), and are described by
| (7.35) |
and
| (7.36) |
Here the last equality derives from and since and are in the same sheet for any . Combining (7) with (7.35) and (7.36), we obtain the desired conclusion. ∎
Acknowledgments We would like to thank Takumi Kakegawa, and professors Kenta Ozeki, Atsuhiro Nakamoto for the fruitful discussions and suggestions. Yu.H. acknowledges financial supports from the Grant-in-Aid of Scientific Research (C) Japan Society for the Promotion of Science (Grant No. 18K03401, No. 23K03203). E.S. acknowledges financial supports from the Grant-in-Aid of Scientific Research (C) Japan Society for the Promotion of Science (Grant No. 24K06863) and Research Origin for Dressed Photon.
References
- [1] Ambainis, A., Bach, E., Nayak, A., Vishwanath, A. and Watrous, J., One-dimensional quantum walks, Proc. 33rd Annual ACM Symp. Theory of Computing, (2001) 37–49.
- [2] Apers, S. and Sarlette, A., Quantum fast-forwarding; Markov chains and graph property testing, Quantum Information and Computation 19 (2019) 181–213.
- [3] Colin de Verdière, Y., Sur un nouvel invariant des graphes et un critère de planarit, Journal of Combinatorial Theory B 50 (1990) 11–21.
- [4] Feldman, E and Hillery, M., Quantum walks on graphs and quantum scattering theory, Contemporary Mathematics 381 (2005) 71–96.
- [5] Feldman, E and Hillery, M., Modifying quantum walks: A scattering theory approach, Journal of Physics A: Mathematical and Theoretical 40 (2007) 11319.
- [6] Gross, J. L. and Tucker, W. T., Topological Graph Theory, Dover Pulications, New York (2001).
- [7] Higuchi, K., Feynman-type representation of the scattering matrix on the line via a discrete-time quantum walk, Journal of Physics A: Mathematical and Theoretical 54 (2021) 235203.
- [8] Higuchi, Yu. and Segawa, E., Dynamical system induced by quantum walks, Journal of Physics A: Mathematical and Theoretical 52 (2019) 39520.
- [9] Higuchi, Yu. and Segawa, E., Circuit equation of Grover walk, Annales Henri Poincaré25 (2024) 3739–3777.
- [10] Ko, C, K., Konno, N., Yoo, H, J and Segawa, E., How does Grover walk recognize the shape of crystal lattice?, Quantum Information Processing 17 (2017) 167–185.
- [11] Konno, N., Portugal, R., Sato, I. and Segawa, E., Partition-based discrete-time quantum walks, Quantum Information Processing 17 (2018) 1–35.
- [12] Krovi, H. and Brun, T. A., Quantum walks on quotient graphs, Physical Review A 75 (2007) 062332.
- [13] Mizutani, Y., Horikiri, T., Matsuoka, L., Higuchi, Yu. and Segawa E., Implementation of a discrete-time quantum walk with a circulant matrix on a graph by optical polarizing elements, Physical Review A 106 (2022) 022402.
- [14] Mohar, B. and Thomassen, C., Graphs on Surfaces, Johns Hopkins University Press (2001).
- [15] Nakamoto, A. and Ozeki, K., “Kyokumenjou no Gurahu Riron” (Graphs on Surfaces), Saiensu-Sha (2021) (Japanese book)
- [16] Nordhaus, E. A. and Stewart, B. M., On the Maximum Genus of a Graph, Journal of Combinatorial Theory B 11 (1971) 258–267.
- [17] Portugal, R., Quantum Walk and Search Algorithm, 2nd Ed., Springer Nature Switzerland (2018).
- [18] Ringel, Y. and Youngs, J. W. T., Solution of the Heawood map-coloring problem, Procedings of National Academy of Sciences 60 (1968) 438–445.
- [19] Watrous, J., Quantum simulations of classical random walks and undirected graph connectivity, Journal of Computer and System Sciences 62 (2007) 376–391.