Convex Cylinders and the Symmetric Gaussian Isoperimetric Problem
Abstract.
Let be a measurable Euclidean set in that is symmetric, i.e. , such that has the smallest Gaussian surface area among all measurable symmetric sets of fixed Gaussian volume. We conclude that either or is convex. Moreover, except for the case with and , we show there exist a radius and an integer such that after applying a rotation, the boundary of must satisfy , with when . Here denotes the unit sphere of centered at the origin, and is an integer. One might say this result nearly resolves the symmetric Gaussian conjecture of Barthe from 2001.
Key words and phrases:
symmetric, Gaussian, minimal surface, calculus of variations2010 Mathematics Subject Classification:
60E15, 49J40, 53A10, 60G151. Introduction
In [Bar01], Barthe asked: which symmetric measurable Euclidean set of fixed Gaussian measure minimizes its Gaussian surface area? A subset is symmetric if . It is well-known that a half space minimizes Gaussian surface area, among Euclidean sets of fixed Gaussian measure [Bor75, SC74]. Despite many proofs of this so-called Gaussian isoperimetric inequality [Bor85, Led94, Led96, Bob97, BS01, Bor03, MN15a, MN15b, Eld15, MR15, BBJ17], additionally restricting to symmetric sets causes additional difficulties. Indeed, not much progress seemed to be made on Barthe’s question from 2001 until [Hei21], where various candidate optimal sets were ruled out, following [Man17], where the local minimality and non-minimality of balls centered at the origin was demonstrated. Also, as suggested by Morgan [Hei21, Conjecture 1.14], the answer to Barthe’s question should depend on the Gaussian volume restriction. For example, among symmetric Euclidean sets with Gaussian measure very close to or , a one-dimensional slab (or its complement) should minimize Gaussian surface area. This fact was demonstrated in [BJ20], proving the first known case of Barthe’s question. The proof of [BJ20] considers minimizing the Gaussian surface area plus a “penalty term,” penalizing sets that have a nonzero Gaussian center of mass. Considerable effort is then required to show that minimizers of this functional are symmetric, and they are slabs (or complements of slabs), for an appropriately chosen constant in front of the penalty term.
In this paper, we demonstrate that convex cylinders centered at the origin are the only sets that are stable for the Gaussian surface area, after taking a product with . Our approach is rather different than that of [BJ20]. We begin by adapting the Colding-Minicozzi theory of entropy from [CM12]. In [CM12], it is shown that for self-shrinkers, i.e. surfaces satisfying for all , is an eigenfunction of the second variation operator . (Here denotes the mean curvature of at , i.e. the divergence of the exterior pointing unit normal vector at . Also is defined in (11).) Namely, (see (14)). This explicit eigenfunction with eigenvalue crucially allows a stability analysis of self-shrinkers with respect to the Colding-Minicozzi entropy functional. The Colding-Minicozzi entropy of a surface is the supremum over translations and dilations of the Gaussian surface area. Critical points of this functional are self-shrinkers [CM12], hence the focus of [CM12] on these surfaces.
1.1. Adapting the Colding-Minicozzi Theory
In this paper, we are concerned with a stability analysis of the Gaussian surface area. Critical points of the Gaussian surface area functional satisfy the more general condition that there exists some such that for all . In this setting, the mean curvature is no longer an eigenfunction of the second variation operator (it is an almost eigenfunction though; see (14).) So, one cannot directly use the stability analysis of [CM12] for the Gaussian surface area itself. However, appropriate modifications of the arguments of [CM12] can be made successful in certain cases.
Our general strategy is to show that the second variation operator has an eigenvalue larger than . Finding such an eigenvalue is insufficient to classify symmetric sets with minimal Gaussian surface area. However, if we take a product of an eigenfunction multiplied by a function in an orthogonal direction, as an input to the second variation formula, then we obtain a Gaussian volume preserving and Gaussian surface area decreasing perturbation of (see Lemma 5.4). So, the main task is to look for (approximate) eigenfunctions of with eigenvalue larger than . To accomplish this task, it seems necessary to split into a few different cases.
In [CM12], the stability of the entropy is split into two cases, according to whether or not the surface is mean convex (i.e. if changes sign on ). In the case that changes sign on , since itself is an eigenfunction of with eigenvalue , another eigenfunction of with a larger eigenvalue must exist. In our more general setting, since is no longer an eigenfunction of , the observation that there exists another eigenfunction with a larger eigenvalue of [CM12] no longer applies. So, we instead use a product of multiplied by a function in an orthogonal direction, as an input to the second variation formula.
In the case that does not change sign and on , a curvature bound of the second fundamental form is proven in [CM12] that allows other eigenfunctions of to be used in the second variation formula, and no curvature bound needs to be proven. In our more general setting where , this curvature bound seems difficult to prove in general, so that some functions might not be usable in the second variation formula. Fortunately, we can split into two sub-cases. In the case that and have the same sign, we can use itself in the second variation formula. In the case that and have opposite signs, the curvature bound of [CM12] can be proven, allowing us to use a function of the second fundamental form in the second variation formula. However, in this case, the second variation of itself is not helpful, so we needed to come up with another function to input into the second variation formula, namely the largest eigenvalue of .
It turns out that the largest eigenvalue of the second fundamental form is an almost eigenfunction of (see (13)). (To avoid issues with differentiability and integration by parts, we actually use a smoothed version of the largest eigenvalue of ; see Lemma 5.3.) So, can be used in our second variation formula as long as on a set of positive measure on . If no such set exists where is positive, then all eigenvalues of are negative everywhere, so that is the boundary of a convex set.
In the case that the mean curvature does not change sign, there are two sub-cases to consider. If and , then we can either use itself in the second variation formula, or use a Huisken-type classification from [Hei21] (which does not use any second variation computations). However, if and , then we are only able to deduce convexity of or . In fact, no Huisken-type classification can occur in this case. We will discuss this case further in Section 1.2.
There is still one final case we have not mentioned, namely on , i.e. that is a Gaussian minimal cone. In this last case, these sets cannot minimize Barthe’s problem. This follows by adapting an argument of [Zhu20], which itself adapted an argument of Simons [Sim68]. We use a perturbation of the surface that is a product of a radial and angular component. The radial component is chosen to preserve Gaussian volume, and the angular component is chosen to have a large eigenvalue of the second variation operator.
The Colding-Minicozzi theory [CM12, CIMW13] was originally designed to use the Gaussian surface area to investigate singularities of mean-curvature flows. A connection of Gaussian surface area to mean-curvature flow was established by Huisken [Hui90, Hui93], and [CM12] greatly extended this connection. As a continuation of [Hei21], this paper instead applies the Colding-Minicozzi theory to a Gaussian isoperimetric conjecture.
1.2. The case and
As mentioned above, in the case and , we can only conclude that or is convex, unlike in other cases where we can show that is a round cylinder centered at the origin. The compact version of this convexity statement was proven in [Lee22], though compactness was crucially used there, so it is unclear if the argument there generalizes to the noncompact case. Part of the difficulty of this case is that Huisken’s classification no longer holds [Hui90, Hui93]. Indeed, it is known that, for every integer , there exists and there exists a convex embedded curve satisfying as in Lemma 4.1, and such that is symmetric with respect to a rotation by an angle (and if , and also is not symmetric with respect to a rotation by an angle smaller than ) [Cha17, Theorem 1.2, Theorem 1.3, Proposition 3.2]. Consequently, also satisfies . So, Huisken’s classification cannot possibly hold, at least when .
In the case of even , the curve can be shown to be unstable by [Hei21, Corollary 11.9], since there are more than four nodal domains corresponding to an infinitesimal rotation of . However, it is unclear how to prove instability for the cases and . As shown at the end of [Cha17], there appears to be an infinite family of curves with a single symmetry by a rotation of an angle , and it is unclear if any of our arguments can show these curves are unstable for the Gaussian perimeter.
1.3. Future Directions and Remaining Cases of Barthe’s Problem
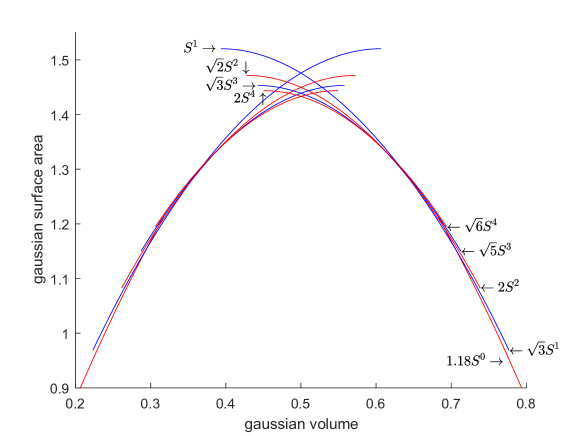
The ultimate goal of Barthe’s Problem 2.1 is to find the minimum Gaussian perimeter of a set in , where we take the infimum over all dimensions . That is, we would like to determine the isoperimetric profile depicted in Figure 2.
Theorem 2.4 classifies those sets of the form that are stable for the Gaussian surface area. If a set minimizes Problem 2.1 and its surface area is achieved in the definition of , then the set must also be stable. However, a priori, it could occur that for each , there exists a set that minimizes Problem 2.1 for a measure constraint , but such that is unstable. Put another way, it could occur that a value is not achieved for any set of finite dimension. In such a case, Theorem 2.4 does not say anything about Problem 2.1. And in fact, we do expect this to happen, but only when . It is conjectured that, for any , is achieved by a set of finite dimension. And in the case , is achieved by a limit of spheres of radius approximately . With this picture in mind, Theorem 2.4 should cover many cases of Problem 2.1 (except when ). It was conjectured by Morgan that, if minimizes Problem 2.1, there exists and there exists such that
We additionally conjecture that satisfies when .
2. Statement of Results
We begin by defining the Gaussian density:
We also denote as a measure of Lebesgue measurable sets in . For a set with Hausdorff dimension , we denote its Gaussian surface area as
Our main problem of interest is the following.
Problem 2.1 (Symmetric Gaussian Problem, [Bar01]).
Fix . Minimize
over all (measurable) subsets satisfying and .
Unless otherwise stated, all sets discussed in this paper will be Lebesgue measurable.
Definition 2.3.
For any integer , define the -dimensional sphere of radius one centered at the origin to be
Theorem 2.4 (Main Theorem).
Let be a measurable set. Assume that minimizes minimizing Problem 2.1. Then or is convex.
Moreover, unless and (or and ), , such that
after rotating if necessary. And if , then .
Theorem 2.4 will be split into several cases, resulting from the combination of Theorems 6.1, 8.5, 10.1 and 7.1.
It is shown in [Man17] that the ball centered at the origin of is a local minimum of Problem 2.1, when the ball’s radius satisfies . (Consequently, the complement of a ball centered at the origin is a local minimum of Problem 2.1, when the ball’s radius satisfies , by Remark 2.2.) It is also shown in [Man17] that a ball of radius is not a local minimum of Problem 2.1. Our results (e.g. Case 2 of Theorem 7.1) show, for a ball of radius centered at the origin, does not minimize problem 2.1 when . So, if , the Gaussian surface area of should only appear as a value in Figure 2 when .
Remark 2.5.
As shown e.g. in the introduction of [Hei21], has asymptotic Gaussian surface area .
In contrast, a half space with Gaussian measure has Gaussian surface area .
Remark 2.6.
For any , denote . As shown in [Sto94, Lemma A.4], this sequence is decreasing: .
3. Preliminaries
We say that is an -dimensional manifold if can be locally written as the graph of a function. For any -dimensional manifold with boundary, we denote
| (1) | ||||
We also denote . We let denote the divergence of a vector field in . For any and for any , we let be the closed Euclidean ball of radius centered at .
Definition 3.1 (Reduced Boundary).
A measurable set has locally finite surface area if, for any ,
Equivalently, has locally finite surface area if is a vector-valued Radon measure such that, for any , the total variation
is finite [CL12].
If has locally finite surface area, we define the reduced boundary of to be the set of points such that
exists, and it is exactly one element of .
For more background on the reduced boundary and its regularity, we refer to the discussion in Section 2 of [BBJ17], [AFP00] and [Mag12]. The following argument is essentially identical to [BBJ17, Proposition 1], so we omit the proof.
Lemma 3.2 (Existence).
There exists a set minimizing Problem 2.1.
3.1. Submanifold Curvature
Here we cover some basic definitions from differential geometry of submanifolds of Euclidean space.
Let denote the standard Euclidean connection, so that if , if , and if is the standard basis of , then . Let be the outward pointing unit normal vector of an -dimensional hypersurface . For any vector , we write , so that is the normal component of , and is the tangential component of . We let denote the tangential component of the Euclidean connection.
Let be an orthonormal frame of . That is, for a fixed , there exists a neighborhood of such that is an orthonormal basis for the tangent space of , for every point in [Lee03, Proposition 11.17].
Define the mean curvature
| (2) |
Define the second fundamental form so that
| (3) |
Compatibility of the Riemannian metric says , . So, multiplying by and summing this equality over gives
| (4) |
Using ,
| (5) |
3.2. First and Second Variation
We will apply the calculus of variations to solve Problem 2.1. Here we present the rudiments of the calculus of variations.
The results of this section are well known to experts in the calculus of variations, and many of these results were re-proven in [BBJ17].
Let be an -dimensional submanifold with reduced boundary . Let denote the unit exterior normal to . Let be a vector field. Unless otherwise stated, we assume that is parallel to for all , i.e.
| (6) |
Let denote the divergence of a vector field. We write in its components as , so that . Let such that
| (7) |
For any , let . Note that . Let .
Definition 3.3.
We call as defined above a normal variation of . We also call a normal variation of .
Lemma 3.4 (First Variation, [Hei21, Lemma 2.4]).
Let . Let for any . Then
| (8) |
| (9) |
4. Variations and Regularity
In this section, we show that a minimizer of Problem 2.1 exists, and the boundary of the minimizer is except on a set of Hausdorff dimension at most .
The results below are repeated from [Hei21].
Unless otherwise stated, all sets below are assumed to be measurable sets of locally finite surface area, such that the Gaussian surface area of , is finite.
Lemma 4.1 (First Variation for Minimizers, [Hei21, Lemma 3.1]).
Let minimize Problem 2.1. Let . Then there exists such that, for any , .
5. Eigenfunctions of L
Let be an orthonormal frame for an orientable -dimensional hypersurface with . Let be the Laplacian associated to . Let be the gradient associated to . (The symbol still denotes the Euclidean connection, and the meaning of the symbol should be clear from context.) For any matrix , define . For any , define
| (10) |
| (11) |
Note that there is a factor of difference between our definition of and the definition of in [CM12]. Below we often remove the arguments of the functions for brevity. We extend to matrices so that for all , and we can similarly extend to matrices.
Remark 5.1.
Let . Using (11), we get the following product rule for .
Lemma 5.2 ( is almost an eigenfunction of [CM15, Proposition 1.2] [Gua18, Lemma 2.1], [Hei21, Lemma 4.1]).
Let be an orientable hypersurface. Let . If
| (12) |
Then
| (13) |
| (14) |
Equation (13) suggests that an eigenvalue of should satisfy an equation similar to (13). That is, if we choose an orthonormal frame such that is diagonal at a point, then it should be the case that is nearly equal to . (Near an umbilic point, the largest eigenvalue of might change quickly, so we should not expect to be equal to .) Such a computation was done in [Lee22]. Also, there is a technical issue, that an eigenvalue of might not be differentiable, or more importantly, we might not be able to integrate by parts using , i.e. we cannot use in the second variation formula, Lemma 4.2.
For these technical reasons, we instead use a softmax function in (15) to approximate the largest eigenvalue of . The function in (15) will be smooth, so we can integrate by parts with it and use it in Lemma 4.2. Moreover, since the function (15) does not rely on the choice of orthonormal frame, we can substitute (13) into the differentiation formula for (15) in (16) below. There is an extra term that appears in (16) that results from the smoothing in (15), but the sign of this extra term is determined, so it does not affect our calculations later very much.
Let . Define the (-smoothed) maximum eigenvalue of by
| (15) |
Here denotes the trace of a square matrix.
Lemma 5.3.
| (16) |
Consequently, if ,
Proof.
Fix . Then
| (17) |
| (18) | ||||
Summing (18) over , we obtain
| (19) |
Note that is a symmetric positive definite matrix with trace , so the last two terms can be written as a sum of terms of the form , i.e.
| (20) |
Recall: if are symmetric positive semidefinite real matrices, , and is itself a symmetric positive semidefinite matrix, so that . Since is symmetric, so is , so that (20) implies
| (21) |
Finally, using (17), if , then
∎
The main strategy used to prove Theorem 2.4 is to demonstrate that has an eigenvalue larger than , and then to use Lemma 5.4 below to conclude that is unstable for Problem 2.1. Proving that the hypothesis of Lemma 5.4 holds seems to require breaking into several different cases, as we do below in the various cases of the proof of Theorem 2.4.
Lemma 5.4.
Let . Let satisfy for all , , and , or . Let defined by
Then for all , , and the corresponding variation of satisfies
Proof.
The following Lemma says that a minimizer of Problem 2.1 satisfies an a priori bound on the Euclidean volume growth of its boundary.
Lemma 5.5.
Let minimize Problem 2.1 with . Then has polynomial volume growth, i.e. there exists a constant such that the Euclidean surface area of satisfies
Proof.
Denote . Let . Let be the complement of a ball centered at the origin such that . Define . Then , and since minimizes Problem 2.1, we have
The last line used the definition of . Canceling like terms, we then get
The last inequality used the definition of . So, there exists such that,
| (23) |
It then follows that has polynomial volume growth. Denote , so that
| (24) | ||||
The last term is nonnegative and finite. Letting , the second term goes to zero by (23). Then letting , (24) becomes
∎
6. Classification of Stable Self-Shrinkers
Theorem 6.1.
Let minimize Problem 2.1. Assume that satisfies
| (25) |
Then there exists an integer such that, after rotating ,
Proof.
Case 1. Assume is compact.
We repeat the proof of [Hei21, Proposition 1.5]. Let be the mean curvature of . If on , then Huisken’s classification [Hui90, Hui93] [CM12, Theorem 0.17] of compact surfaces satisfying (25) implies that is a round sphere (). So, we may assume that changes sign on . From (14) with , . Since changes sign, is not the largest eigenvalue of , by spectral theory [Zhu20, Lemma 6.5] (e.g. using that is a compact operator). That is, there exists a function and there exists such that . Moreover, on . Since and , it follows by (11) that is an eigenfunction of with eigenvalue . That is, we may assume that for all .
From the second variation formula, Lemma 4.2,
So, to complete the proof, it suffices by Lemma 4.2 to find a function such that
-
•
for all . ( preserves symmetry.)
-
•
. ( preserves Gaussian volume.)
-
•
. ( decreases Gaussian surface area.)
We choose as above so that , and so that . (Since changes sign and , can satisfy the last equality by multiplying it by an appropriate constant.) We then define . Then satisfies the first two properties. So, it remains to show that satisfies the last property. Note that, since and have different eigenvalues, they are orthogonal, i.e. . Therefore,
(Since for all , and is compact, both and are finite a priori.) We conclude that cannot change sign, i.e. we must have in this case.
Case 2. Assume is not compact, and is not identically zero.
This case follows the argument of Case 1 [CM12, Lemmas 9.44 and 9.45], [Zhu20, Proposition 6.11]. If does not change sign, Huisken’s classification [Zhu20, Theorem 0.4] now implies that there exists such that, after rotating , . If changes sign, then instead of asserting the existence of , one approximates by a sequence of Dirichlet eigenfunctions on the intersection of with large compact balls. We then repeat the proof of Case 1. The eigenfunctions and are not necessarily orthogonal in the non-compact case, but their inner product can be made to satisfy for arbitrary [Zhu20, Equation 6.41], so the above argument works, with this change. Also, the integration by parts is justified in Lemmas 8.2 and 8.4.
Case 3. Assume is identically zero.
In this final remaining case, we have from (25) that for all . That is, is a (minimal) cone. We eliminate this case in Section 11.
∎
7. Classification of Stable Convex Sets
Theorem 7.1.
Proof.
By (14),
| (26) |
(The quantity is finite a priori by Lemma 8.4; note also has polynomial volume growth by Lemma 5.5.) So,
| (27) |
with equality only when identically, i.e. when identically (since implies ). If on all of , then by (14),
Since we conclude that on all of . In summary, the inequality in (27) is strict, unless on .
In the former case of strict inequality in (27), let in Lemma 5.4. Note that for all . Then Lemma 5.4 and (27) imply that the variation of correspond to satisfies
This inequality violates the minimality of , achieving a contradiction, demonstrating that we must have on . In the latter case, we must then have for some . Since , we conclude that . ∎
8. Non-Mean Convex Sets are Unstable
In order to prove instability of noncompact sets, we will need to integrate by parts in the second variation formula in Lemma 4.2. The noncompactness, together with the low-dimensional singularities on the surface (see Lemma 4.3) mean that integrating by parts is nontrivial, hence the results below.
Lemma 8.1 (Integration by Parts, [CM12, Corollary 3.10], [Zhu20, Lemma 5.4], [Hei21, Lemma 4.4]).
Let be an -dimensional hypersurface. Let . Assume that is a function and is a function with compact support. Then
Corollary 8.2 (Integration by Parts, Version 2 [Zhu20, Lemma 5.4], [Hei21, Corollary 5.10]).
Let . Let be functions. Suppose the Hausdorff dimension of is at most . Assume that
Then
Corollary 8.3 ([Zhu20, Lemma 6.2], [Hei21, Corollary 5.5]).
Let and let . Assume . Suppose is a function with and . Assume that the Hausdorff dimension of is at most . Then for any ,
Lemma 8.4 ([CM12, Theorem 9.36], [Hei21, Lemma 5.6]).
Let be a connected, orientable hypersurface with polynomial volume growth and with possibly nonempty boundary. Assume such that for all . Let . Assume . Then
Theorem 8.5.
Let . Suppose changes sign on (that is, is not mean convex). Then does not minimize Problem 2.1.
Proof.
Assume for the sake of contradiction that minimizes Problem 2.1. From Lemma 4.1, there exists such that
| (28) |
The case was already treated in Theorem 6.1. We may therefore assume that . Replacing with if necessary (i.e. changing the direction of , which changes the sign of and and therefore of ), we may assume that .
Since is not mean convex, changes sign, i.e. there exists a set of positive measure on where . Let . By (14),
| (29) |
(Note that has polynomial volume growth by Lemma 5.5. Then, by Lemma 8.4 and Corollary 8.2, and are well-defined, the integrals in (29) are finite, and we can integrate by parts with or .) Since ,
| (30) |
Note that equality cannot occur in (30) since equality would only occur when on the set where , but this cannot happen since implies ).
9. Curvature Bounds
We will eventually reduce the mean-convex case of Theorem 2.4 to the convex case. Doing so requires using a (smoothed version of) the largest eigenvalue of the second fundamental form (see (15)) in the second variation formula from Lemma 4.2. In order to use (15) in Lemma 4.2, we need to integrate by parts, which then requires an a priori curvature bound to hold. This curvature bound (see Lemma 9.4) was known to hold for mean-convex self-shrinkers, i.e. when [CM12], and a few small adjustments to their argument allow the bound to apply in the case with and .
For any hypersurface , we define
| (31) |
Lemma 9.2 (Simons-type inequality, [Sim68, CM12, CW18, Zhu20]).
Let be a orientable hypersurface. Let . Suppose , . Then
| (32) | ||||
Lemma 9.3 ([CM12, Lemma 10.2]).
Let be any -dimensional hypersurface. Then
| (33) |
Proof.
Since , and
the maximum principle [Eva98, Theorem 6.4.2] (or in this case, the minimum principle applied to ) implies that on . Then is well-defined, so
| (34) | ||||
Note that by Corollary 8.3. Let . Integrating by parts with Lemma 8.1,
From the AMGM inequality, , so that
| (35) |
Recall that we assumed so the integral on the left is nonnegative. Therefore,
| (36) |
Let to be chosen later. Using now in (36), where , , and using the AMGM inequality in the form , ,
| (37) | ||||
Using the product rule for , and that
Multiplying this inequality by and integrating by parts with Lemma 8.1,
(We removed the term since doing so only decreases the quantity on the right.) Rearranging this inequality and then using the AMGM inequality in the form ,
| (38) | ||||
Now, choose , so that . We then can move the term on the right side to the left side to get some such that
In the last line, we used the inequality . This follows by Lemma 4.1, since , so for any , .
We now choose a sequence of increasing to as so that the term vanishes. This is possible due to the assumptions that and the Hausdorff dimension of is at most . Such functions are constructed and this estimate is made in [Zhu20, Lemma 6.4]:
| (39) |
Recall the definition of from (15). In order to integrate by parts with via Lemma 8.2, we need the following Lemma
Lemma 9.5.
Let . Then
Proof.
From (17) and Lemma 9.4, we have for any
Note that . From (17), Hölder’s inequality with exponents and , and Lemma 9.4,
Now, let , Let , and integrate by parts with Lemma 8.1,
| (41) | ||||
Let be an approximation to the identity supported on a ball of radius as in Lemma 9.4. Letting and using , the last integral in (41) goes to zero by e.g. [Zhu20, Corollary 5.3]. Also, , so that , so the term in (41) converges as , since by Lemma 9.4. We therefore conclude that the first integral in (41) converges as . Observe that
| (42) | ||||
For any we can bound all terms except the last one in absolute value by a constant plus
This quantity is finite by Lemma 9.4. As observed in (41), the first term in (42) converges to a finite value as . Letting then , we conclude that
Repeating the above argument with , we also obtain
Therefore,
We finally can conclude that
All above upper bounds on these integrals did not depend on , so we can additionally take the supremum over to conclude the proof. (Note that all quantities in (42) are finite after taking , except possible for the last term. Therefore, the last term is also bounded after taking the supremum over .)
∎
10. Stable Mean Convex Sets are Convex
Theorem 10.1.
Let . Assume that is mean convex (i.e. does not change sign on ). Assume minimizes Problem 2.1. Then or is convex.
Proof.
From Lemma 4.1, there exists such that
The case was already treated in Theorem 6.1. We may therefore assume that . Replacing with (i.e. changing the direction of the unit exterior normal vector, which changes the signs of and and therefore of ), we may assume that . We may additionally assume that on , since the case and was treated already in Theorem 7.1.
Since we assumed and , we may freely use Lemma 9.4.
Recall the definition of in (15). Let . We may assume that there exists such that on a set of positive measure on , otherwise all eigenvalues of are negative, i.e. is convex, and the proof is complete. From Lemma 5.3,
| (43) | ||||
(The quantity is finite a priori by Lemma 9.5. And when we integrate by parts with in the second variation formula, that will be justified by Lemma 9.5 and Lemma 8.2.) The final term is nonnegative. Using this and (13),
| (44) |
We now let . Then converges to the maximum of and the maximum eigenvalue of , as does . So, the first term vanishes by the Dominated Convergence Theorem and Lemma 9.4. Denote . Similarly, the Dominated Convergence Theorem gives
| (45) |
Recall that we assumed that and , therefore and
(Equality cannot occur here since would imply that is convex, and the proof would be complete.) Since , we have
| (46) |
we can now conclude the proof as in Theorem 7.1.
11. Symmetric Minimal Cones are Unstable
In this Section, we prove Case 3 of Theorem 6.1. That is, we show that symmetric minimal cones are unstable for the Gaussian surface area, within the category of symmetric sets. That is, a symmetric minimal cone can be perturbed to another nearby symmetric set with smaller Gaussian surface area, in a way that preserves the Gaussian volume of the set.
Proof of Case 3 of Theorem 6.1.
In this proof, in order to match the notation and formulas from [Zhu20], we use a factor of in our Gaussian density, rather than a factor of .
From the regularity part of Lemma 4.3, since for all and is a cone (i.e. has a singularity at the origin), we must have . Let . Let denote the cone intersected with the sphere, and let denote the regular part of . From the second variation formula, Lemma 4.2, recall that
| (47) |
where, as opposed to (11), we now have [Zhu20, Equation (1.12)],
| (48) |
For any , define . Using [Zhu20, Equation (4.18)], we can decompose the operator from (48) into its radial component and its spherical component
| (49) |
Here is the spherical component [Zhu20, Equation (4.13)]
where denotes the second fundamental form of , and is the radial component
We can then rewrite the quadratic form from (47) as
| (50) |
We first note that
| (51) |
Let , . Then is an eigenfunction of , since
Let , . Integrating by parts we get
| (52) |
We then obtain
| (53) |
(Recall so this integral is finite a priori.) And if , then
| (54) |
So, corresponds to a Gaussian volume-preserving perturbation. Also, for all ,
| (55) | ||||
So, using , we have
| (56) | ||||
Now, we will construct a function using a product of a radial function and a spherical function. Define
| (57) |
Starting with the radial integral in (50), we have
| (58) | ||||
(Recall so the above integrals are finite.) (Even though is unbounded near the origin, we can use in the second variation formula by multiplying by cutoff functions, as in [Zhu20, Lemma 6.6, Proposition 6.7].)
We now use [Zhu20, Theorem 0.3] (see also the proof of Theorem 8.3 in [Zhu20]) to find a nonnegative Dirichlet eigenfunction of such that
| (59) |
with , and such that for all . (Since is symmetric, cannot be a hyperplane through the origin, i.e. is not totally geodesic, so [Zhu20, Theorem 0.3] applies. Also, since is nonnegative and is symmetric, is a nonnegative eigenfunction of , i.e. we may assume a priori that itself is symmetric.)
Acknowledgement. Thanks to Galyna Livshyts and Jonathan Zhu for helpful discussions.
References
- [AFP00] Luigi Ambrosio, Nicola Fusco, and Diego Pallara, Functions of bounded variation and free discontinuity problems, Oxford Mathematical Monographs, The Clarendon Press, Oxford University Press, New York, 2000. MR 1857292
- [Bar01] Franck Barthe, An isoperimetric result for the Gaussian measure and unconditional sets, Bulletin of the London Mathematical Society 33 (2001), 408–416.
- [BBJ17] Marco Barchiesi, Alessio Brancolini, and Vesa Julin, Sharp dimension free quantitative estimates for the Gaussian isoperimetric inequality, Ann. Probab. 45 (2017), no. 2, 668–697. MR 3630285
- [BJ20] Marco Barchiesi and Vesa Julin, Symmetry of minimizers of a Gaussian isoperimetric problem, Probab. Theory Related Fields 177 (2020), no. 1-2, 217–256. MR 4095016
- [Bob97] S. G. Bobkov, An isoperimetric inequality on the discrete cube, and an elementary proof of the isoperimetric inequality in gauss space, Ann. Probab. 25 (1997), no. 1, 206–214.
- [Bor75] Christer Borell, The Brunn-Minkowski inequality in Gauss space, Invent. Math. 30 (1975), no. 2, 207–216. MR 0399402 (53 #3246)
- [Bor85] by same author, Geometric bounds on the Ornstein-Uhlenbeck velocity process, Z. Wahrsch. Verw. Gebiete 70 (1985), no. 1, 1–13. MR 795785 (87k:60103)
- [Bor03] by same author, The Ehrhard inequality, C. R. Math. Acad. Sci. Paris 337 (2003), no. 10, 663–666. MR 2030108 (2004k:60102)
- [BS01] A. Burchard and M. Schmuckenschl ger, Comparison theorems for exit times, Geometric & Functional Analysis GAFA 11 (2001), no. 4, 651–692 (English).
- [Cha17] Jui-En Chang, 1-dimensional solutions of the -self shrinkers, Geometriae Dedicata (2017), 1–16.
- [CIMW13] Tobias Holck Colding, Tom Ilmanen, William P. Minicozzi, II, and Brian White, The round sphere minimizes entropy among closed self-shrinkers, J. Differential Geom. 95 (2013), no. 1, 53–69. MR 3128979
- [CL12] Marco Cicalese and Gian Paolo Leonardi, A selection principle for the sharp quantitative isoperimetric inequality, Arch. Ration. Mech. Anal. 206 (2012), no. 2, 617–643. MR 2980529
- [CM12] Tobias H. Colding and William P. Minicozzi, II, Generic mean curvature flow I: generic singularities, Ann. of Math. (2) 175 (2012), no. 2, 755–833. MR 2993752
- [CM15] Tobias Holck Colding and William P. Minicozzi, II, Uniqueness of blowups and łojasiewicz inequalities, Ann. of Math. (2) 182 (2015), no. 1, 221–285. MR 3374960
- [CW18] Qing-Ming Cheng and Guoxin Wei, Complete -hypersurfaces of weighted volume-preserving mean curvature flow, Calc. Var. Partial Differential Equations 57 (2018), no. 2, Art. 32, 21. MR 3763110
- [Eld15] Ronen Eldan, A two-sided estimate for the gaussian noise stability deficit, Inventiones mathematicae 201 (2015), no. 2, 561–624 (English).
- [Eva98] Lawrence C. Evans, Partial differential equations, Graduate Studies in Mathematics, vol. 19, American Mathematical Society, Providence, RI, 1998. MR 1625845
- [Gua18] Qiang Guang, Gap and rigidity theorems of -hypersurfaces, Proc. Amer. Math. Soc. 146 (2018), no. 10, 4459–4471. MR 3834671
- [Hei21] Steven Heilman, Symmetric convex sets with minimal Gaussian surface area, Amer. J. Math. 143 (2021), no. 1, 53–94. MR 4201779
- [Hui90] Gerhard Huisken, Asymptotic behavior for singularities of the mean curvature flow, J. Differential Geom. 31 (1990), no. 1, 285–299. MR 1030675
- [Hui93] by same author, Local and global behaviour of hypersurfaces moving by mean curvature, Differential geometry: partial differential equations on manifolds (Los Angeles, CA, 1990), Proc. Sympos. Pure Math., vol. 54, Amer. Math. Soc., Providence, RI, 1993, pp. 175–191. MR 1216584
- [Led94] Michel Ledoux, Semigroup proofs of the isoperimetric inequality in Euclidean and Gauss space, Bull. Sci. Math. 118 (1994), no. 6, 485–510. MR 1309086 (96c:49061)
- [Led96] by same author, Isoperimetry and Gaussian analysis, Lectures on probability theory and statistics (Saint-Flour, 1994), Lecture Notes in Math., vol. 1648, Springer, Berlin, 1996, pp. 165–294. MR 1600888 (99h:60002)
- [Lee03] John M. Lee, Introduction to smooth manifolds, Graduate Texts in Mathematics, vol. 218, Springer-Verlag, New York, 2003. MR 1930091 (2003k:58001)
- [Lee22] Tang-Kai Lee, Convexity of -hypersurfaces, Proc. Amer. Math. Soc. 150 (2022), no. 4, 1735–1744. MR 4375760
- [Mag12] Francesco Maggi, Sets of finite perimeter and geometric variational problems, Cambridge Studies in Advanced Mathematics, vol. 135, Cambridge University Press, Cambridge, 2012, An introduction to geometric measure theory. MR 2976521
- [Man17] Domenico Angelo La Manna, Local minimality of the ball for the gaussian perimeter, Advances in Calculus of Variations 12 (2017), 193 – 210.
- [MN15a] Elchanan Mossel and Joe Neeman, Robust dimension free isoperimetry in gaussian space, The Annals of Probability 43 (2015), no. 3, 971–991.
- [MN15b] by same author, Robust optimality of Gaussian noise stability, J. Eur. Math. Soc. (JEMS) 17 (2015), no. 2, 433–482. MR 3317748
- [MR15] Matthew McGonagle and John Ross, The hyperplane is the only stable, smooth solution to the isoperimetric problem in Gaussian space, Geom. Dedicata 178 (2015), 277–296. MR 3397495
- [SC74] V. N. Sudakov and B. S. Cirel′son, Extremal properties of half-spaces for spherically invariant measures, Zap. Naučn. Sem. Leningrad. Otdel. Mat. Inst. Steklov. (LOMI) 41 (1974), 14–24, 165, Problems in the theory of probability distributions, II. MR 0365680 (51 #1932)
- [Sim68] James Simons, Minimal varieties in riemannian manifolds, Ann. of Math. (2) 88 (1968), 62–105. MR 0233295
- [Sto94] Andrew Stone, A density function and the structure of singularities of the mean curvature flow, Calculus of Variations and Partial Differential Equations 2 (1994), 443–480.
- [Zhu20] Jonathan J. Zhu, On the entropy of closed hypersurfaces and singular self-shrinkers, J. Differential Geom. 114 (2020), no. 3, 551–593. MR 4072205