Cosmic Accelerations Characterize the Instability of the Critical Friedmann Spacetime
Department of Mathematics
University College London
London, WC1H 0AY
United Kingdom
christopher.alexander@ucl.ac.uk
&
Department of Mathematics
University of California
Davis, CA 95616
United States
temple@math.ucdavis.edu
&Zeke Vogler
Department of Mathematics
University of California
Davis, CA 95616
United States
zekius@math.ucdavis.edu
Abstract
We give a definitive characterization of the instability of the pressureless () critical () Friedmann spacetime to smooth radial perturbations. We use this to characterize the global accelerations away from Friedmann spacetimes induced by the instability in the underdense case. The analysis begins by incorporating the Friedmann spacetimes into a mathematical analysis of smooth spherically symmetric solutions of the Einstein field equations expressed in self-similar coordinates with , conceived to realize the critical Friedmann spacetime as an unstable saddle rest point . We identify a new maximal asymptotically stable family of smooth outwardly expanding solutions which globally characterize the evolution of underdense perturbations. Solutions in align with a Friedmann spacetime at early times, generically introduce accelerations away from Friedmann spacetimes at intermediate times and then decay back to the same Friedmann spacetime as uniformly at each fixed radius . We propose as the maximal asymptotically stable family of solutions into which generic underdense perturbations of the unstable critical Friedmann spacetime will evolve and naturally admit accelerations away from Friedmann spacetimes within the dynamics of solutions of Einstein’s original field equations, that is, without recourse to a cosmological constant or dark energy.
Keywords General Relativity Instability Cosmology Dark Energy
This material is based upon work supported by EPSRC Project: EP/S02218X/1
1 Introduction
In our 2017 announcement in Proceedings of the Royal Society A [29],111Authors dedicate this paper to our former collaborator and long-time friend Joel Smoller and acknowledge our use of unpublished notes which were the basis for [29] and represent the point of departure for the present paper. Smoller, Temple and Vogler introduced the STV-PDE, a version of the perfect fluid Einstein field equations for spherically symmetric spacetimes. These were obtained by starting with the spacetime metric in standard Schwarzschild coordinates (SSC) and then re-expressing it using the self-similar variable in place of , assuming zero cosmological constant and assuming to keep as a spacelike coordinate. Since is a measure of the distance of light travel since the Big Bang in a Friedmann spacetime,222By a Friedmann spacetime, we mean a Friedmann–Lemaître–Robertson–Walker (FLRW) spacetime. Also recall that the curvature parameter in Friedmann spacetimes can always be scaled to one of the values . The spacetime is unique and spacetimes each describe a one parameter family of distinct spacetimes depending on the single parameter defined below in (5.17). Thus we refer to Friedmann spacetimes by or . Unless a different equation of state is specified, our use of the term Friedmann always assumes a dust () solution of the Einstein field equations. we view as valid out to approximately the Hubble radius, a measure of the distance across the visible Universe [31]. The STV-PDE were conceived to represent the pressureless () critical () Friedmann spacetime as an unstable saddle rest point333We refer to a rest point of a PDE as a time independent solution depending only on . The character of a rest point of the STV-PDE, that is, unstable, stable and so on, is determined by the character it exhibits in the approximating STV-ODE obtained by the expansion of solutions in powers of , as described later., which we denote by for Standard Model. This is based on the important realization that the metric components and fluid variables of the , Friedmann spacetime in SSC can be expressed as a function of alone in an appropriate time gauge (see [29] and Theorem 30 below). The character of a rest point is difficult to disentangle in coordinate systems, such as comoving coordinates, where it appears time dependent, especially so for PDE. To analyze rest points of PDE requires a procedure of finite approximation and this was manifested in [29] by the observation that solutions of the STV-PDE which are smooth at the center of symmetry can be developed into a regular expansion in even powers of with time dependent coefficients. This generates a nested sequence of autonomous ODE which close444This asymptotic expansion does not close at order when [29]. in the time dependent coefficients at every order . We name the resulting system of ODE the STV-ODE of order and observe that at each order, the STV-ODE is autonomous in the log-time variable (so and ). Moreover, the phase portrait of the resulting autonomous system at each order contains the unstable saddle rest point , together with the stable degenerate rest point . , for Minkowski, is the limit of the time asymptotic decay of solutions as .555The presence of a single rest point which characterizes the late time dynamics of solutions is a serendipitous simplification inherent in the choice of self-similar coordinates.
The STV-ODE are nested in the sense that higher order solutions provide strict refinements of solutions determined at lower orders. We prove that the STV-ODE are linear inhomogeneous ODE at every order in the sense that the coefficients of the highest order terms are always of lower order. Our analysis shows that the eigenvalue structure of the rest points and determine the character of the phase portrait of the STV-ODE at every order and the essential character of all the phase portraits can be deduced from the phase portraits at orders and . Our analysis establishes that and Friedmann spacetimes correspond to unique solution trajectories which lie in the unstable manifold of at all orders of the STV-ODE, and general higher order solutions of the STV-ODE agree exactly with a Friedmann spacetime at order . In particular, we prove that the phase portraits of the STV-ODE of order and characterize the instability of Friedmann spacetimes: The Friedmann spacetime is unstable with a codimension one unstable manifold, while the Friedmann spacetimes are locally unstable at but are globally asymptotically stable in the sense that all underdense perturbations of tend to the same rest point as . Moreover, this remains true at all orders and a smooth solution of the STV-PDE will lie in the unstable manifold of at all orders of the STV-ODE if and only if it lies in the unstable manifold of at order .
The existence of a second positive eigenvalue of at order (the first being at order ) implies the existence of a one parameter family of nontrivial solutions of the STV-ODE of order which exist within the unstable manifold of but diverge from Friedmann spacetimes at that order. The existence of a second negative eigenvalue at at order establishes that the unstable manifold of is a codimension one space of trajectories, so solutions of the STV-ODE are generically not within the unstable manifold of . We prove that at order all solutions in the unstable manifold of exit tangent to the trajectory associated with Friedmann spacetimes but a unique positive eigenvalue smaller than the leading order eigenvalue enters at order . Since the eigenvector associated with the smallest eigenvalue dominates at rest point in backward time, it follows that generic solutions in the unstable manifold of exit tangent to a new eigendirection, different from Friedmann, at all orders and above.
The stable and unstable manifolds of together with the stable manifold of characterize the global phase portraits of the STV-ODE at all orders. An analysis of the phase portraits lead to the introduction of a new family of solutions of the STV-PDE that extend the Friedmann spacetimes to a maximal asymptotically stable family of solutions into which underdense perturbations of the unstable Friedmann spacetime will globally evolve and generically accelerate away from Friedmann spacetimes early on. Thus globally characterizes the instability of the , Friedmann spacetime to smooth radial underdense perturbations. We prove that solutions in align with a Friedmann spacetime at early times, introduce accelerations away from Friedmann spacetimes at intermediate times and then decay back to the same Friedmann spacetime as (at each fixed ). The existence of positive eigenvalues at , with eigensolutions tending to as at every order of the STV-ODE, demonstrates the global instability of the Friedmann spacetime to perturbation at every order. On the other hand, the decay of solutions in to the rest point as establishes the global large time asymptotic stability of all Friedmann spacetimes. However, the existence of a second positive eigenvalue at at order demonstrates the instability of Friedmann spacetimes to perturbation within the unstable manifold of at early times, implying that solutions in generically accelerate away from Friedmann spacetimes at intermediate times before asymptotic stability brings them back to a Friedmann spacetime via decay to as (for fixed ). The existence of positive eigenvalues of at every order implies that a similar instability of Friedmann spacetimes occurs at within the unstable manifold of at every order of the STV-ODE as well. We conclude that solutions in characterize both the instability of the , Friedmann spacetime to smooth radial underdense perturbations and characterize the accelerations away from Friedmann spacetimes at intermediate times, both within the dynamics of Einstein’s original field equations, that is, without recourse to a cosmological constant or dark energy.
1.1 Introduction to the Family of Spacetimes
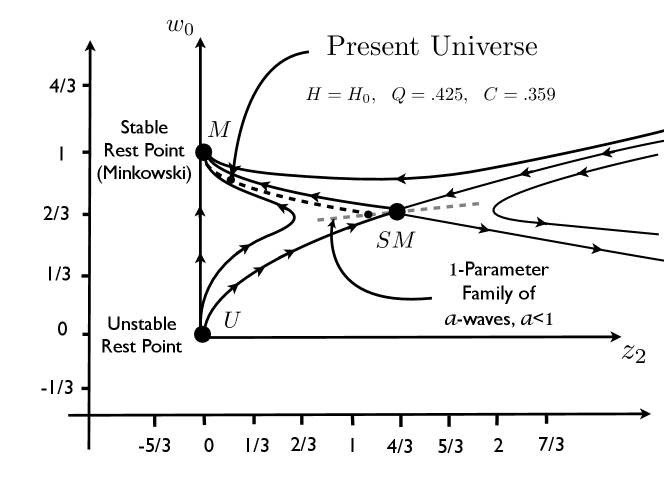
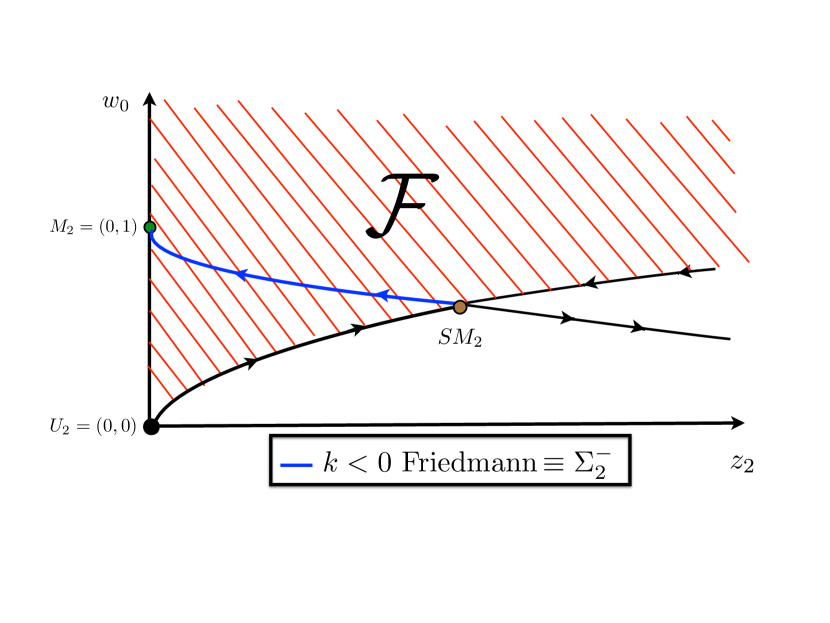
We argued in [29] that solutions of the STV-PDE which are smooth at the center of symmetry can be expanded in even powers of by Taylor’s theorem (see Section 3) and from the order term we obtain an approximation which solves the STV-ODE of order . In the present paper we go on to prove that, for each such solution, there exists a solution dependent time translation of the SSC time coordinate , which we call time since the Big Bang, such that making the SSC gauge transformation to time since the Big Bang has the effect of eliminating the leading order negative eigenvalue at . Moreover, this gauge transforms every solution to either the rest point or one of the two trajectories in the unstable manifold of at . As a result of this, every solution agrees exactly with a , or Friedmann spacetime in the phase portrait of the STV-ODE at leading order , see Figure 1. There is an important distinction to make here: The STV-ODE are autonomous in log-time , so translation in maps solutions to physically different solutions which traverse the same trajectory of the STV-ODE, but translation in is a gauge freedom of the SSC metric ansatz which maps trajectories of the STV-ODE to different trajectories which represent the same physical solution. Thus choosing time since the Big Bang eliminates a physical redundancy in the solution trajectories of the STV-ODE. When time since the Big Bang is imposed, there are only three remaining trajectories in the leading order phase portrait of the STV-ODE: The unstable rest point , the underdense (left) component of the unstable manifold and the overdense (right) component of the unstable manifold, see Figure 1. The underdense component of the unstable manifold of at is the unique trajectory which takes to and corresponds to Friedmann spacetimes, with the value of determined by translation in along this unique trajectory. The unique trajectory exiting in the opposite overdense direction is the component of the unstable manifold of corresponding to Friedmann spacetimes. The three (including the fixed point ) trajectories of the phase portrait, after time since the Big Bang is imposed, is diagrammed in Figure 2.
In this paper we identify and study the entire subset of solutions of the STV-PDE defined by the condition that, when time is taken to be time since the Big Bang, the resulting solution agrees with an underdense Friedmann solution in the leading order STV-ODE phase portrait. That is, the solution projects to the unique trajectory in the unstable manifold of which takes to at order , parameterized by for some log-time translation constant of the autonomous STV-ODE. We identify as a new maximal asymptotically stable family of outwardly expanding solutions of the STV-PDE defined by the condition that solutions agree with a Friedmann spacetime in the leading order phase portrait of the expansion in even powers of when the SSC time is translated to time since the Big Bang associated with each solution. The main purpose of this paper is to demonstrate and characterize the instability of the Friedmann spacetime and the large time asymptotic stability and early time instability of the Friedmann spacetimes within the family of solutions .
We first characterize the forward time dynamics and asymptotic stability of solutions in by proving that every solution which decays to the rest point as in the phase portrait of the STV-ODE at order , that is, every solution in , also decays as to a corresponding unique stable rest point in the phase portrait of the STV-ODE at every order . This characterizes the forward time dynamics of solutions in because it implies that every solution in decays, as , to a Friedmann spacetime faster than it decays to Minkowski space as at each fixed radii at every order . The asymptotic decay of solutions in as immediately implies uniform bounds on solutions of the STV-ODE for all time and in terms of bounds on the initial data at alone. The STV-ODE are linear in the highest order variables when lower order solutions are interpreted as known inhomogeneous terms, so solutions of the STV-ODE exist for all time at every order. For the purposes of asymptotic analysis, we formally assume convergence of solutions of the STV-ODE up to order , with errors at order estimated by bounds at order according to Taylor’s theorem, an assumption justified rigorously by simply restricting to an appropriate space of analytic solutions.666The convergence of solutions in in the limit for , with estimates provided by Taylor’s theorem, follows directly from mild assumptions on the growth rate of the initial data, due to the fact that all solutions lie on bounded trajectories which tend to as at every order .
The backward time dynamics () of solutions in is determined at each order by the instability of the Friedmann spacetime, that is, by the eigenvalues of the saddle rest point as it is represented in the STV-ODE phase portrait at each order . By definition, each solution in agrees at leading order () with a Friedmann spacetime represented as the unique trajectory in the unstable manifold of which tends to as and to as . To understand the backward time dynamics of solutions in at higher orders , we demonstrate that Friedmann solutions correspond to a single trajectory in the unstable manifold of in the phase portrait of the STV-ODE at every order , with the value of determined by log-time translation at order . We then prove that two new eigenvalues of the rest point appear at each new order and all of them are positive except one negative eigenvalue which appears at order . From this we conclude that the family decomposes into two essential components: The underdense component of the unstable manifold of , consisting of trajectories which connect to at every order , and solutions which tend to in forward time but do not tend to in backwards time. Because of the presence of the order negative eigenvalue at , solutions in will generically not tend to in backward time, but rather will follow the one-dimensional stable manifold of , the unique trajectory which emerges from in backward time as (). Thus the Big Bang limit of a generic solution in is not self-similar like beyond the leading order, but rather, generically displays a non-self-similar character at the Big Bang for all orders and above. This provides an important example of the self-similarity hypothesis, that solutions which approach a singularity exhibit self-similarity to leading order [4]. However, in this case, such solutions are generically not self-similar beyond leading order.
To reiterate, each spacetime in agrees with a unique Friedmann spacetime in the phase portrait of the STV-ODE at leading order (all the way into the Big Bang at ) and agrees with the same Friedmann spacetime in the limit (for each fixed ), but generically accelerates away from this Friedmann spacetime at intermediate times in the phase portraits of the STV-ODE of order . Since each member of the family by definition contains the component of the unstable manifold of which contains the leading order behavior of Friedmann spacetimes imposed at , represents a maximal extension of the one parameter family of Friedmann spacetimes to a robust asymptotically stable family of spacetimes which exist within the family of smooth spherically symmetric spacetimes. Since the family is the full space of solutions into which underdense perturbations of evolve, characterizes the instability of to underdense perturbations. Because a negative eigenvalue of does not exist above order , it follows that a solution in lies in the unstable manifold of if and only if its projection onto the phase portrait of the STV-ODE lies in the unstable manifold of , so the unstable manifold of at characterizes the unstable manifold of at all orders. A main goal of this paper is to prove that, even though is asymptotically stable, solutions in generically accelerate away from Friedmann spacetimes at early times due to an instability at .
To establish the instability of Friedmann spacetimes at , it suffices to demonstrate that there are multiple solutions of the which agree with Friedmann spacetimes at order and in the limit but which diverge from Friedmann spacetimes at for some . Imposing time since the Big Bang, every solution in lies on the unique trajectory in the unstable manifold of which takes to and hence every solution agrees with a Friedmann solution at order . Thus to establish the instability of Friedmann spacetimes at order , it suffices to prove that: (1) Solution trajectories corresponding to Friedmann lie in the unstable manifold of and (2) there exist other solutions in in the unstable manifold of which diverge from Friedmann at . For this, we use known exact formulas to prove that the solution trajectory of Friedmann spacetimes lies in the unstable manifold of at order with time translation differentiating . Since a solution in lies in the unstable manifold of at every order if and only if it lies in the unstable manifold of order , we can conclude that Friedmann spacetimes lie on a single trajectory in the unstable manifold of at every order as well. Next we use exact formulas to prove that the trajectory corresponding to Friedmann spacetimes at order is an eigensolution of the eigenvalue which enters at order (this is also shown to order in Section 12). Thus to establish the instability of Friedmann spacetimes it suffices only to prove that a second positive eigenvalue emerges at at order . From this, the early time instability of the Friedmann spacetimes is established in the phase portrait of the STV-ODE of order , diagrammed in Figure 3, even though the whole family is asymptotically stable. We discuss the phase portrait at order in Section 1.6.
At this stage it is convenient to introduce a refined notation that distinguishes the family of solutions of the STV-PDE from the solutions of the STV-ODE which approximate solutions in up to arbitrary order. To this end, we define as the set of solutions of the STV-ODE of order which satisfy the property that the trajectory reduces at order to the unique trajectory which connects to , but not necessarily at higher orders. We also define to be the subset of solutions which lie in the unstable manifold of the rest point in STV-ODE of order . Note that by definition . Finally, let denote the set of solutions of the STV-PDE whose order approximation lies in the unstable manifold of rest point in the phase portrait of the STV-ODE of order for every . We may sometimes refer to as at order and as the stable manifold of in at order .
Having set out the main elements, we now discuss them in detail.
1.2 The STV-PDE
In Section 7 we give a new derivation of the Einstein field equations in what we call SSCNG coordinates. These coordinates are standard Schwarzschild coordinates (SSC), that is, where the metric takes the form
| (1.1) |
in addition to possessing a normal gauge (NG) when expressed in the variables . An arbitrary spherically symmetric spacetime can generically777That is, under the condition , where is the angular part of the metric, see [29]. be transformed to SSC metric form by defining so is the angular part of the metric and then constructing a time coordinate , complementary to , such that the metric is diagonal in -coordinates [31, 34]. The SSC metric form is invariant under the gauge freedom of arbitrary time transformation , so to set the gauge, we impose the condition that , that is, geodesic (proper) time at [29]. We refer to this as the normal gauge (NG).
The STV-PDE use density and velocity variables:
coupled to the SSC metric components and . Recall that the STV-PDE are not the Einstein field equations in coordinates but rather the Einstein field equations with an SSC metric form expressed in terms of and with independent variables [29]. We extend the derivation of the STV-PDE to equations of state of the form , with constant, in Theorem 32 below. However, our concern in this paper is with the case , applicable to late time Big Bang Cosmology.888In the Standard Model of Cosmology, the pressure drops precipitously to zero at about 10,000 years after the Big Bang, an order of magnitude before the uncoupling of matter and radiation [17].
Theorem 1 (Special case of Theorem 9).
Assume the equation of state . Then the perfect fluid Einstein field equations with an SSC metric are equivalent to the following four equations in unknowns , , and :
| (1.2) | ||||
| (1.3) | ||||
| (1.4) | ||||
| (1.5) |
Equations (1.2)–(1.5) are the STV-PDE. The NG is imposed by defining a time transformation which sets at [29]. From here on, when we refer to a solution of the STV-PDE we always assume the NG gauge is imposed. Note that there is one remaining freedom left in this gauge, this being the time translation freedom for some constant .
1.3 The STV-ODE
The STV-ODE are derived by expanding smooth solutions of the STV-PDE (1.2)–(1.5) in powers of with time dependent coefficients, collecting like powers of and assuming the NG gauge. The assumption of smoothness at the center implies that the non-zero coefficients in the expansion occur only for even powers and this significantly reduces the solution space of the Einstein field equations by disentangling solutions smooth at the center from the larger generic solution space. Fortuitously, the resulting equations in the fluid variables and uncouple from the equations for the metric components and , leading to the expansions:
| (1.6) | ||||
| (1.7) |
which close in for at every order when . We prove in Theorem (13) that the STV-ODE of order closes to form a autonomous system
| (1.8) |
in unknowns
such that the leading order variables are determined by an inhomogeneous system of the form
where and involves only lower order terms which are determined by the STV-ODE of order . We refer to the system of equations (1.8) as the STV-ODE of order .
It follows that the STV-ODE are nested in the sense that each STV-ODE of order contains as a sub-system the STV-ODE of order for all . Thus the self-similar formulation decouples solutions at every order in the sense that one can solve for solutions up to order and use the STV-ODE at order to solve for from arbitrary initial conditions . Assuming lower order solutions are fixed, the STV-ODE of order turn out to be linear in the highest order terms . For approximations up to orders we can use the approximation in place of because this incurs errors of the order given that . The derivation of the general STV-ODE of order is carried out carefully in following sections but to set up the picture and highlight the main results we first describe the phase portraits of the STV-ODE which emerge at orders and of this expansion.999The STV-ODE at order and were introduced in [29] without detailed derivation. Here we derive the STV-ODE up to order and derive the form of the STV-ODE at all orders together with an explicit algorithm for computing them. Note that Figure 1 is take from [29] with the modification that in this paper, the coordinate system is centered on , while coordinates were centered at in [29]. We also record a correction to the equation incorrectly expressed in equation (3.33) of [29]. This error occurred at fourth order in and did not affect the results claimed in [29], see (1.20)–(1.23) below. Unanticipated by the authors ahead of time, it turns out that the global character of the phase portrait of the STV-ODE at any order emerges from orders and .
1.4 The STV-ODE Phase Portrait of Order
A calculation shows that the STV-ODE of order is the system:
| (1.9) | ||||
| (1.10) |
Using , system (1.9)–(1.10) converts to an autonomous system of ODE in . It is easy to verify that the system admits three rest points: The source , the unstable saddle rest point and the degenerate stable rest point . The rest point plays no role once time since the Big Bang is imposed, the rest point describes the asymptotics of solutions tending to Minkowski space as and the coordinates of rest point are precisely the first two terms in the self-similar expansion of the critical () Friedmann spacetime, viewed here as the Standard Model due to the central role it has played in the history of Cosmology. A calculation gives the eigenvalues and eigenvectors of rest points and as:
respectively. The phase portrait for system (1.9)–(1.10) is diagrammed in Figure 1. The two components of the unstable manifold of correspond to the two trajectories associated with the positive eigenvalue , the underdense component being the trajectory which connects to and the overdense component leaving in the opposite direction, see Figure 1. The trajectory connecting to is the underdense trajectory in the stable manifold of corresponding to the negative eigenvalue and the overdense stable trajectory emerges opposite to this at . Using classical formulas for Friedmann spacetimes which set the time of the Big Bang to , we verify that the underdense trajectory connecting to corresponds to Friedmann spacetimes and the overdense trajectory in the unstable manifold of corresponds to spacetimes. We obtain an exact formula for the trajectory connecting to from an expansion of such formulas for Friedmann spacetimes in powers of . The variable , which parameterizes the one-parameter family of Friedmann spacetimes under scalings that set , is given by , so the entire one-parameter family of Friedmann spacetimes at order consists of together with the two trajectories in its unstable manifold, parameterized by the time translation freedom , which determines the value of and thereby determines a unique solution in the Friedmann family [34].
Now the SSC metric ansatz with NG still leaves one gauge freedom yet to be set, namely, the freedom to impose time translation . The time translation freedom of the SSC system leaves open an unresolved redundancy in solutions of the the STV-ODE in the sense that time translation maps each trajectory of the STV-ODE of order to a different trajectory which represents the same physical solution. We show that for each trajectory of the system (1.9)–(1.10), there exists a unique time translation , which we call time since the Big Bang, which converts that trajectory either to or to one of the two trajectories in the unstable manifold of . In particular, referring to the phase portrait depicted in Figure 1 and making the gauge transformation to time since the Big Bang, the trajectories in the stable manifold of , that is, the one taking to and the trajectory opposite it at , go over to , whereas all the trajectories above these, that is, trajectories in the domain of attraction of , go over to the underdense portion of the unstable manifold of corresponding to Friedmann. Trajectories below the stable manifold of go over to the overdense portion of the unstable manifold of , corresponding to Friedmann spacetimes. From this it follows that imposing the solution dependent time since the Big Bang has the effect of eliminating the negative eigenvalue together with the rest point , and we can, without loss of generality, restrict our analysis to the space of solutions which agree with or a trajectory in its unstable manifold, in the phase portrait of the solution at . Since these trajectories agree with the Friedmann spacetimes, we conclude that, under appropriate change of time gauge, all smooth solutions of the STV-PDE agree with a Friedmann spacetime at leading order in the STV-ODE. Our purpose here is to study the space of solutions which lie on the trajectory which takes to at leading order, and hence agree with a Friedmann spacetime at order of the STV-ODE. We do not consider the Friedmann spacetimes, but observe that these exit the first quadrant of our coordinate system at , the time of maximal expansion.
The rest point describes the time asymptotic decay of solutions in to Minkowski space as . A calculation shows that is a degenerate stable rest point with repeated eigenvalue and single eigenvector . Thus solutions in decay to time asymptotically along the -axis as . Moreover, as is standard for degenerate stable rest points with the character of , and decay to at leading order like and respectively. Thus, assuming solutions in agree with Friedmann at leading order, but diverge at higher orders with errors estimated by Taylor’s theorem, we can use the phase portrait of the STV-ODE alone to conclude that, to leading order as , every solution in decays to and at the same rate for fixed and decays to Friedmann faster than to Minkowski for fixed (since ). Theorem 14 below establishes that is a degenerate stable rest point in the phase portrait of the STV-ODE at every order , exhibiting the same negative eigenvalue with a single eigenvector at each order. The degenerate structure of rest point at all orders implies that the estimate for the discrepancy between a solution in and the Friedmann spacetime it agrees with at leading order, is estimated by the discrepancy at second order as . We conclude that one would see perfect alignment between solutions in and Friedmann at order and the error between them tends to zero by a factor faster as than what you would see without taking account of the decay of solutions to rest point at higher orders. The result, which uses standard rates of decay at degenerate stable rest points with the character of , is recorded in the following theorem.
Theorem 2.
Imposing time since the Big Bang, each solution in agrees exactly with a single Friedmann spacetime at leading order in the STV-ODE, Moreover, as :
| (1.11) | ||||
| (1.12) |
Using and , we conclude for a general solution in :
| (1.13) | ||||
| (1.14) |
Thus, using the fact that for all solutions in , and agree at leading order with a Friedmann solution, the discrepancy between a general solution in and the Friedmann solution it agrees with at leading order is estimated by:
| (1.15) | ||||
| (1.16) |
that is, exhibiting a faster decay rate by with in the density than in the velocity at each fixed as . Furthermore, the rate of decay to Minkowski space is estimated by the rate of decay to at leading order, which is given by:
| (1.17) | ||||
| (1.18) |
as .
Note that in Theorem 2 the extra factor in the density gives the faster rate of decay of Friedmann over the decay rate known for the Friedmann spacetime. From this we conclude faster decay to Friedmann than to Minkowski and faster decay in the density than in the velocity.
The trajectory taking to at order can be defined implicitly, which provides a canonical leading order evolution shared by all underdense solutions in , including Friedmann spacetimes. This spacetime is discussed in Subsection 9. The rest point persists to every order because the the critical Friedmann spacetime is self-similar at every order of the STV-ODE. Somewhat surprisingly, the crucial behavior of solutions in emerges at order .
1.5 The STV-ODE Phase Portrait of Order
The nested property of the STV-ODE in (1.8) implies that lower order eigenvalues of persist to higher orders. We prove that two distinct additional eigenvalues always emerge at in going from the STV-ODE of order to the STV-ODE of order for all . These are given by the formulas:
| (1.19) |
From (1.19) we conclude that both eigenvalues and are positive except at orders and . We argued above that is eliminated by changing to time since the Big Bang, an assumption equivalent to assuming a solution agrees with Friedmann at leading order . At order , and . A calculation also shows that at second order, the Friedmann solutions continue to lie on the trajectory associated with the leading order eigenvalue . Recall that assuming time since the Big Bang eliminates the leading order negative eigenvalue by transforming the solution space to solutions which agree at order with either or a trajectory in the unstable manifold of . The existence of the negative eigenvalue implies that is an unstable saddle rest point with a one-dimensional stable manifold and a codimension one unstable manifold at each order . Also recall that we let denote the subset of solutions with trajectories in the unstable manifold of identified as an dimensional space of trajectories taking to in the phase portrait of the STV-ODE of order . The appearance of one positive and one negative eigenvalue at order , and only positive eigenvalues at higher orders, immediately implies the following theorem.
Theorem 3.
The unstable manifold of forms a codimension one set of trajectories in the STV-ODE at each order and a trajectory lies in at every order of the STV-ODE if and only if it lies in . Moreover, trajectories in take to at all orders of the STV-ODE, agree with a Friedmann spacetime at order in the limits and but are generically distinct from, and hence accelerate away from, Friedmann spacetimes at intermediate times in the phase portrait of the STV-ODE at every order .
It follows from the theory of non-degenerate hyperbolic rest points that all solution trajectories in emerge tangent to the eigendirection associated with the smallest positive eigenvalue at . Of course at order the leading order eigenvalue associated with the solution trajectory of the Friedmann spacetime is the smallest eigenvalue and this remains the smallest positive eigenvalue at . However, an eigenvalue smaller than this emerges at order namely, . Thus solutions in generically emerge tangent to the leading order eigendirection of the Friedmann spacetimes only up to order , but all solutions in which have a component of will emerge from tangent to its eigenvector , which is not tangent to the Friedmann direction , corresponding to the leading order eigenvalue at . From this we establish that although all the solutions in tend to rest point as , solutions in in the complement of , that is, those that miss in backward time, follow the backward stable manifold of , consistent with the standard phase portrait picture of a non-degenerate saddle rest point. Since the only negative eigenvalue of enters at order , we can conclude that any solution that lies in the unstable manifold of in the phase portrait of the STV-ODE at order , also lies in the unstable manifold of at all higher orders . In this sense, the unstable manifold of is characterized at order . Note that all solutions of the STV-ODE in which lie in the unstable manifold of , take to in the phase portrait of the STV-ODE at all orders, and hence are bounded for all time . Trajectories not in the unstable manifold of miss in backwards time in every STV-ODE of order and tend in backward time instead to the stable manifold associated with the unique negative eigenvalue, that is, a single trajectory. Thus , which consists of the domain of attraction of at every order, contains trajectories which do not emanate from , and hence correspond to a Big Bang at which is qualitatively different from the self-similar blow-up at , and hence qualitatively different from the Big Bang observed in Friedmann spacetimes. An immediate conclusion of this analysis is a rigorous characterization the self-similar nature of the Big Bang in general spherically symmetric smooth solutions to the Einstein field equations when .
Theorem 4.
When time is taken to be time since the Big Bang, solutions in always exhibit self-similar blow-up in the phase portrait of the STV-ODE but will generically exhibit non-self-similar blow-up at all higher orders .
Since all eigenvalues which emerge at at orders above are positive, the unstable manifold of , and the entire phase portrait of the STV-ODE at higher orders, is determined from the phase portrait at order . In particular, the unstable manifold of is determined at order in the sense that a solution in lies in the unstable manifold of at all orders if and only if it lies in the unstable manifold of at order . We now describe the phase portrait of the STV-ODE at order in detail.
1.6 The STV-ODE Phase Portrait of Order
The corrections to Friedmann accounted for by solutions in at order are most important as this is the order in which a negative eigenvalue emerges at and also the leading order in which divergence from Friedmann spacetimes is observed. The order is important because it determines , which provides the third order correction to redshift vs luminosity, the correction at the order of the anomalous acceleration of the galaxies which are purportedly accounted for by dark energy in the standard CDM model of Cosmology [29].
The STV-ODE of order is the system:101010Note that this corrects an error in [29] in the terms involving , a mistake at fourth order in which did not affect the conclusions.
| (1.20) | ||||
| (1.21) | ||||
| (1.22) | ||||
| (1.23) |
Note first that the STV-ODE of order appears as the subsystem (1.20)–(1.21). Viewed as a autonomous system, (1.20)–(1.23) admits the three rest points: , and . Imposing time since the Big Bang restricts the solution space to solutions in the unstable manifold of at order and this eliminates from the solution space. A calculation gives eigenvalues and eigenvectors of rest point and in the STV-ODE of order as:
where and correspond to the eigenvalue and eigenvector of and the rest to . The phase portrait for solutions of (1.20)–(1.23) is depicted in Figure 3. Note that and are referred to as (and ) and (and ) in Figure 3 respectively to indicate that the fixed points are those for the (and ) system.
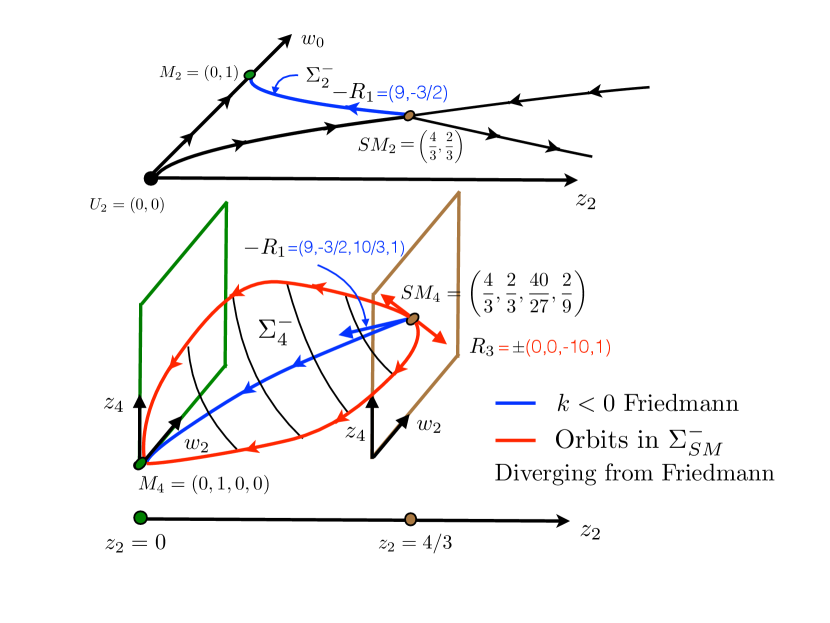
The time since the Big Bang gauge choice is assumed in Figure 3, so all elements of agree with Friedmann at leading order, that is, they lie on the unstable trajectory taking to in the leading order phase portrait associated with (1.20)–(1.21). This is denoted by in Figure 3, with and specifying the unstable manifold for the and systems respectively. The phase portraits of Figures 1 and 3 are consistent because the first two components of give the direction of the trajectory which connects to at level and the second two components represent the higher order corrections. The projections of the Friedmann solutions onto solutions of the STV-ODE of orders and are represented by the blue curves in Figure 3. Note that the presence of a second positive eigenvalue implies the unstable manifold of intersects in a two dimensional space of trajectories emanating from . We prove that only the eigensolution of corresponds to the Friedmann spacetime at order . This immediately implies that there exist solutions in the unstable manifold of which agree with a Friedmann spacetime at order but diverge from Friedmann at intermediate times. Since all solutions in decay to as , this implies that solutions in the unstable manifold of agree with Friedmann in the limits , and at leading order , but which diverge, and hence introduce accelerations away from Friedmann, at intermediate times. By the Hartman–Grobman Theorem, nonlinear solutions correspond to linearized solutions in a neighborhood of a rest point, so solutions in the unstable manifold of are determined by their limiting eigendirection at , and hence we conclude that the magnitude of the acceleration away from Friedmann is measured by , which can be arbitrarily large. We state this precisely in the following theorem.
Theorem 5 (Partial statement of Theorem 40).
All solutions in the unstable manifold of at order leave tangent to
| (1.24) |
where
| (1.33) |
are the eigenpairs spanning the unstable manifold of the linearization of the system of STV-ODE (1.20)–(1.23) about the rest point and and are fixed constants determined by the unique Friedmann spacetime at . The constant is then a second free parameter which describes the instability of the Friedmann spacetime at at order .
Note that the smallest positive eigenvalue to emerge at any order at is and since all trajectories in have a non-zero component of by definition, we can further conclude that all trajectories in the unstable manifold of are tangent to in backward time at in the phase portrait of the STV-ODE of order but come in tangent to at in the portraits of the STV-ODE at all higher orders. We show in Theorem 48 that the Friedmann solution has no components in direction and that by the nested structure of the STV-ODE, has non-zero components in only leading order entries.
The existence of a unique negative eigenvalue at order implies that is an unstable saddle rest point, but not an unstable source. From this we conclude that not all solutions in lie in the unstable manifold of , even though they decay time asymptotically to as . Since is a saddle rest point, backward time trajectories in starting near will not typically tend to , but rather, indicative of the standard phase portrait of a saddle rest point, will generically follow the backward time trajectory of the stable manifold at . This implies the Big Bang is self-similar like the critical () Friedmann spacetime only at leading order but generically not self-similar at higher orders, as recorded in Theorem 4 above. We conclude that the time evolution of perturbations of becomes indistinguishable from Friedmann solutions at late times after the Big Bang, agrees exactly with the same Friedmann solution in the leading order phase portrait, including the limits and , but introduce anomalous accelerations away from Friedmann spacetimes at intermediate times, starting at order . This provides a rigorous mathematical framework and mechanism for determining and explaining the source of the corrections to redshift vs luminosity computed numerically in [29], that is, created by the instability of .
The new parameter associated with naturally introduces accelerations away from Friedmann spacetimes at order in , and hence order in the velocity . These mimic the effects of a cosmological constant at third order in redshift factor vs luminosity distance , as measured from the center [29]. This is the order of the discrepancy between the prediction of Friedmann spacetimes with a cosmological constant and Friedmann spacetimes without one. According to Figure 3, at late times after the Big Bang we should expect to observe spacetimes close to Friedmann, but not . Moreover, perturbations from Friedmann spacetimes, including perturbations of on the side of at early times after the Big Bang, diverge from Friedmann spacetimes at intermediate times before they decay back to Friedmann at late times. Regarding the intermediate times, the new free parameter associated with the unstable manifold of the critical Friedmann spacetime () is not present in pure Friedmann spacetimes and this effect appears to mimic the effects of a cosmological constant at the order (third order in redshift factor looking out from the center) at which the predictions of a cosmological constant diverge from the predictions of the Friedmann spacetimes without one. Said differently, this theory identifies a one parameter family of corrections to Friedmann at order , with further corrections to Friedman determined by the positive eigenvalues of at higher orders, the higher the order the smaller the correction near the center.
More generally, it was proven in [29] that the order in redshift factor in the relation between redshift and luminosity looking out from the center of a spherically symmetric spacetime, is at the same order as in our theory here. The Hubble constant and the quadratic correction to redshift vs luminosity is determined at order from and respectively, and hence determines the third order correction in red-shift factor with determining the fourth order term. Since one requires values of and to determine whether a solution trajectory lies in , it follows that the fourth order correction to red-shift vs luminosity would be required to determine whether or not a cosmology lies in the unstable manifold of , that is, to determine whether the Big Bang is self-similar like at all orders, or whether it diverges from self-similarity at order . We conclude that the family extends the Friedmann spacetimes to a stable family of spacetimes, closed under small perturbation, which characterizes the instability of the critical () and underdense () Friedmann spacetimes to smooth radial perturbations.
1.7 The Canonical Spacetime at Order
When time since the Big Bang is imposed, every trajectory of the STV-ODE of order reduces to or to a trajectory in its unstable manifold. In the underdense case, this is the unique trajectory which takes to in the limit at order . This trajectory, which we label , and its log-time translations provide a canonical leading order evolution shared by all underdense solutions in , including Friedmann spacetimes. The resulting evolution , is therefore an explicit spacetime which is in a sense more fundamental than Friedmann spacetimes because it is shared, under log-time translation, by all underdense solutions to leading order. In [29] we proved that and present time in this leading order evolution are sufficient to uniquely determine the Hubble constant and quadratic correction in the relationship between redshift factor vs luminosity distance ,
as measured at the center of the spacetime, so long as . Serendipitously, this latter constraint was shown in [29] to be consistent with Friedmann augmented with 70% dark energy, the assumption of the model. Because of its fundamental nature, it is useful to have an explicit formula for , which is provided by Theorem 42 by extracting the leading order evolution from a known implicit formula for Friedmann spacetimes [13]. The result is restated in the following theorem.
Theorem 6 (Partial statement of Theorem 42).
Define by
where
Then the functions
| (1.34) | ||||
| (1.35) |
provide exact formulas for the particular solution of the system (1.9)–(1.10) which traverses the trajectory connecting to in Figure 1, that is,
Moreover, is the leading order term in expansion (1.6)–(1.7) of the Friedmann solution assuming is time since the Big Bang and , where parameterizes the Friedmann solutions in their standard formulation. Furthermore, the corresponding formula for the leading order part of a Friedmann spacetime in terms of general is then given by:
| (1.36) |
The approximate solution of the STV-PDE which corresponds to the trajectory is
Substituting and gives the equivalent SSC approximate solution
The approximate solutions and describe the time asymptotics of solutions in as recorded in the following corollary.
Corollary 7.
Let be a solution in which determines through and . Then there exists a such that
as at each fixed , with errors and in and respectively; and
as at each fixed , with errors and in and respectively. Moreover, agrees to the same orders with the unique Friedmann spacetime determined by .
1.8 Conclusions
The Friedmann spacetimes in the limit , with or without a cosmological constant, have been the accepted large scale model for late stage Big Bang Cosmology since Hubble’s measurement of the expanding Universe in 1929. In the modern theory of Cosmology, the zero pressure Friedmann model applies after the time when the pressure drops precipitously to zero, some 10,000 years after the Big Bang, about an order of magnitude before the decoupling of radiation and matter gives rise to the microwave background radiation [17]. The widely accepted standard model for the large scale expansion of the Universe is a critically expanding Friedmann spacetime with dark energy modeled by a positive cosmological constant, which is negligible relative to the energy density at early times. In this model, dark energy accounts for approximately 70% of the energy density of the Universe at present time [29]. We propose as an extension of the Friedmann spacetimes to a stable family of cosmological models which reduce to Friedmann in the time asymptotic limit (for fixed ) but naturally introduce anomalous accelerations relative to the Friedmann spacetimes at early and intermediate times into the dynamics of solutions of the Einstein field equations, without recourse to a cosmological constant. This confirms mathematically that a direct consequence of Einstein’s original theory of General Relativity, without a cosmological constant or dark energy, is that one can expect to observe a close approximation to non-critical () Friedmann spacetimes at late times after the Big Bang, but not critical () Friedmann spacetimes.111111The density is too large for a cosmological constant of the current observed magnitude to influence the stability of early on during the Big Bang at the onset of the instability when the pressure drops to zero [29].
The presence of solutions in the stable manifold of that are different from Friedmann spacetimes tells us that general perturbations of Friedmann spacetimes in , as well as underdense perturbations of the Friedmann spacetime, at early times after the Big Bang produce accelerations away from Friedmann solutions before they decay back to Friedmann as (for fixed ). Thus anomalous accelerations away from Friedmann spacetimes are not a violation, but a prediction of Einstein’s original theory of General Relativity without a cosmological constant, and such does not change the picture during the early epoch when the cosmological constant is negligible relative to the energy density.121212As in [29], it is interesting to consider whether this might explain some of the conundrums with the Standard Model of Cosmology, such as the variable cosmological constant, the flatness problem or the uniform temperature problem. The present paper focuses only on the mathematics, the intention is to address the aforementioned problems in future publications.
The definitive description of the instability of the critical Friedmann spacetime in terms of the family of spacetimes set out here provides new insights for exploring the hypothesis that the observed anomalous acceleration of the galaxies might be explained within Einstein’s original theory of General Relativity without the cosmological constant, that is, the possibility that the Universe on the largest scale has evolved from a smooth perturbation of shortly after the Big Bang, such that the resulting solution lies within the family , with our galaxy near the center of that expansion. This possibility appears more intriguing for two reasons: First, the instability of to perturbations at every order makes the Friedmann spacetime implausible as a physically observable model, with or without dark energy, and second, our theory here establishes that solutions in , the space of solutions into which underdense perturbations of will evolve, generically admit solutions which accelerate away from Friedmann spacetimes as they evolve away from and before they decay back to Friedmann solutions as at all orders of the STV-ODE, qualitatively rich enough to mimic the effects of dark energy. Moreover, as demonstrated in [29], the acceleration at the order of the quadratic term in lies within the narrow range , consistent with the effects of a cosmological constant .
We comment that in [31] the authors also proposed a wave model alternative to dark energy in which a self-similar solution of the perfect fluid Einstein field equations, interpreted as a local time-asymptotic wave pattern at the end of the Radiation Dominated Epoch,131313When the pressure drops precipitously to at about 10,000 years after the Big Bang, an order of magnitude before the uncoupling of matter and radiation around 300,000 years after the Big Bang. induces an underdensity which triggers an instability in when the pressure drops to zero. This was modeled as a mechanism for creating the observed anomalous acceleration of the galaxies observed at present time. For this, authors in [31] identified a one parameter family of self-similar solutions of the perfect fluid Einstein field equations, parameterized by the so-called acceleration parameter , such that is the Friedmann spacetime with equation of state .141414This is the equation of state for the state of matter known as pure radiation, as well as the equation of state for the extreme relativistic limit of free particles [34]. The authors proposed solutions in this family as candidates for time asymptotic wave patterns at the end of the Radiation Dominated Epoch of the Big Bang. These self-similar solutions produce perturbations of at the end of the Radiation Dominated Epoch and the authors introduced and employed a self-similar formulation of the SSC equations to numerically evolve the resulting perturbations up through the Matter Dominated Epoch to present time. As a result of this, a unique value of the acceleration parameter was identified which produced the correct Hubble constant and quadratic correction to redshift vs luminosity at present time. From this, a prediction was made at the third order in the redshift factor in the expansion of redshift vs luminosity [31],
where is the redshift factor and is the luminosity. This was compared with the predictions of dark energy. The main principle is that an observer looking outward from the center at time into a spacetime evolving as a solution in the family will measure the order correction to redshift vs luminosity as a function of the coefficient of among and . Thus, in principle, there are the same number of parameters in an expansion of in powers of redshift as there are initial conditions which can be freely assigned to determine a solution in . Thus the first through fourth order corrections are determined by , , and respectively, all determined by the STV-ODE of order .
Note that the unstable manifold at order of the STV-ODE is a two parameter surface in which the Friedmann solutions account for only one of the two parameters, so Friedmann spacetimes can only account for and , and then is determined from these. The freedom to allow a two-parameter unstable manifold at order allows one to freely assign , but this then constrains the value of . Finally, the freedom to assign and as two free parameters, in addition to and , is the right number of initial conditions to determine a general solution in at order . This then allows for the freedom to assign as well. Although we confine ourselves here to the mathematics, our intention is to further explore the thesis proposed in [29], that is, that the instability of alone might account for experimental incongruencies, like a variable cosmological constant, associated with the observed anomalous acceleration of the galaxies, within Einstein’s original theory, without recourse to a cosmological constant.
As a final comment, we note that the STV-ODE describe the evolution of solutions along each line , with constant, and determine the time asymptotics of solutions implicitly from initial data starting from arbitrary initial time , so any boundary condition at infinity is free to be imposed. Indeed, for solutions starting at time on the underdense side of the stable manifold of in the phase portrait in Figure 2, the limit at is the rest point . The rest point emerges implicitly from the analysis in SSCNG coordinates and we surmise that this boundary condition would be difficult to guess ahead of time to impose as a boundary condition in different coordinate systems. For example, decay to rest point implies that the velocity aligns with as the density tends to zero in smooth solutions of the Einstein field equations. It is interesting to note that when , the SSCNG time coordinate diverges from comoving time except at , so the time asymptotics of the velocity would be difficult to guess from knowledge of solutions given in a comoving coordinate system alone. The effect of imposing any other boundary condition at infinity in a different coordinate system, like Lemaître–Tolman–Bondi coordinates, would necessarily break the smoothness condition at , leading to a singularity at the origin [22]. Moreover, the perturbations in do not represent simple under-densities relative to the critical Friedmann solution because setting as a boundary condition at infinity would not in general be consistent with solutions in . For one thing, solutions in the unstable manifold of which decay back to as remain aligned with Friedmann at leading order but incur an advancing or retarding of which will be significant at intermediate times before the decay of the trajectory to takes over. In fact, this effect is exactly at the order of the measured anomalous acceleration [31]. The purpose of the present paper is to complete the mathematical theory of the pressureless self-similar Einstein field equations, give a definitive characterization of the instability of the critical Friedmann spacetime and to give a global description of underdense perturbations of in terms of the family . Authors will return to the problem of modeling redshifts in a subsequent publication.
1.9 Summary
In summary, the family characterizes the instability of the critical Friedmann spacetime and the accelerations away from Friedmann are described quantitatively at every order by the STV-ODE. We identify a new positive and negative eigenvalue at in the phase portrait of the STV-ODE of order , different from the leading order eigenvalue associated with Friedmann spacetimes. The positive eigenvalue produces a new free parameter which generates accelerations away from Friedmann spacetimes within the unstable manifold of and the negative eigenvalue at produces accelerations away from Friedmann spacetimes in , outside the unstable manifold . This directs us to an underlying mechanism which produces a consequential third order correction to redshift vs luminosity, the order of the discrepancy associated with dark energy, both within and its complement , different from the predictions made by Friedmann spacetimes. In particular, this provides a deeper mathematical understanding of the source of the third order correction computed numerically in [29]. Such accelerations away from Friedmann spacetimes are shown to be triggered by arbitrarily small perturbations of , a significant consequence of the instability of the Friedmann spacetime to the subject of Cosmology. The authors intend to address the physical redshift vs luminosity problem quantitatively from this point of view in a forthcoming paper.
1.10 Outline of Paper
In Section 2 we summarize the main results in this paper. In Section 3 we explain the condition for a spherically symmetric solution of the Einstein field equations to be smooth at the center of symmetry. Our requirement for smoothness at the center is simply that the nonzero terms in the expansion of the solution in powers of should contain only even powers . In particular, this implies that smooth solutions solve the STV-ODE at each order . In Section 4 we demonstrate that the time since the Big Bang gauge forces every trajectory at order to agree with a Friedmann spacetime. In Section 5 we review the Friedmann spacetimes in comoving coordinates and derive simple general formulas for coordinate transformations which take spherically symmetric metrics to SSCNG. In Section 6 we give a new simpler proof of the self-similarity of the Friedmann spacetime in SSCNG coordinates for equations of state of the form . In Section 7 we present a new derivation of the STV-PDE, which includes the case of non-zero pressure by incorporating the equation of state into the equations. In Section 8 we derive the STV-ODE of order by expanding the STV-PDE in even powers of . In Section 9 we discuss the STV-ODE at orders and and we incorporate the Friedmann solutions into these systems. In Section 10 we characterize the unstable manifolds of at orders and and identify a new free parameter in the unstable manifold of at order , not accounted for by Friedmann solutions. In Section 11 we discuss the higher order STV-ODE and prove that all solutions which tend to the rest point at order also converge to at all higher orders . In Section 12 we prove that the Friedmann spacetimes are pure eigensolutions of the STV-ODE up to order . The first appendix, Section 13 are where some of the more technical proofs are given. The second appendix, Section 14, is where we make the connections between the Theorems stated in [29], which used a different notation and were stated without proof, and the results in this paper. Finally, in the third appendix, Section 15, we discuss Lemaître–Tolman–Bondi coordinates.
2 Statement of Results
We start by recording the following result, which asserts that self-similar coordinates are valid out to approximately the Hubble radius.
Theorem 8 (Informal statement of Theorems 24 and 26).
The mapping is a regular one-to-one mapping of the SSC to self-similar coordinates for all .
In the theorem below we derive our most general version of the STV-PDE, that is, for perfect fluid spacetimes with equation of state with constant.
Theorem 9 (Partial statement of Theorem 32).
Assume the equation of state with constant . Then for , the perfect fluid Einstein field equations with an SSC metric are equivalent to the following four equations in unknowns , , and :
| (2.1) | ||||
| (2.2) | ||||
| (2.3) | ||||
| (2.4) |
where
and
| (2.5) |
Theorem 9 reduces to Theorem 1 of the Introduction when , applicable to late time Big Bang Cosmology [17], the setting of this paper.
The authors’ original motivation to formulate a self-similar version of the Einstein field equations was the discovery that, when and the usual gauge of proper time at with the Big Bang at is employed, the Friedmann spacetime in SSC has the property that all of the variables , , and are functions of alone, and hence represent a time independent solution, or rest point, of the STV-PDE, suggesting to the authors that such a PDE would be useful in studying the stability properties of the Standard Model of Cosmology. To state this precisely, we begin with the exact expression for the , Friedmann spacetimes in comoving coordinates , which is given by Theorem 2 on page 88 of [26].
Theorem 10 (Partial statement of Theorem 29).
In comoving coordinates , the Friedmann metric with equation of state takes the form
| (2.6) |
where:
| (2.7) | ||||
| (2.8) | ||||
| (2.9) |
and the four velocity satisfies
| (2.10) |
To describe the mapping , which we prove takes (2.6) to SSC self-similar form, we note first that the SSC radial coordinate must be to match the spheres of symmetry, that is,
| (2.11) |
where
Next, we introduce the auxiliary variable , so that , and define the SSC time variable in terms of by
| (2.12) |
where
| (2.13) |
Then (2.11)–(2.13) define a mapping by
| (2.14) |
The following theorem establishes that the mapping converts the , Friedmann spacetime to self-similar SSC form.
Theorem 11 (Informal statement of Theorem 30).
Assume . Then in (2.14) defines a regular coordinate mapping and takes the , Friedmann spacetime to metric form
| (2.15) |
such that the metric components , , the density variable and velocity
| (2.16) |
are functions of the single variable according to:
| (2.17) | ||||
| (2.18) | ||||
| (2.19) | ||||
| (2.20) |
Moreover, is given implicitly as a function of by the the relation
Restricting to the case and imposing the NG time gauge, solutions of the STV-PDE smooth at the center of symmetry admit the following formal expansion in even powers of . We include here the metric coefficients and as well as the fluid variables and :
| (2.21) | ||||
| (2.22) | ||||
| (2.23) | ||||
| (2.24) |
with:
| (2.25) |
The STV-ODE are derived by substituting (2.21)–(2.24) into the STV-PDE and collecting like powers of . The equations close at every order and we name the resulting systems the STV-ODE of order . Carrying this procedure out to order is the subject of the following theorem.151515The STV-ODE of order appear adequate for modeling redshift vs luminosity relations in Cosmology [29].
Theorem 12 (Partial statement of Corollary 47).
The STV-ODE computed up to order are equivalent to the following system, which closes at every order:
| (2.26) | ||||
| (2.27) | ||||
| (2.28) | ||||
| (2.29) | ||||
| (2.30) | ||||
| (2.31) |
Moreover,
| (2.32) |
and:
| (2.33) | ||||
| (2.34) | ||||
| (2.35) |
Consistent with (1.8), the STV-ODE are nested the sense that the equations of order are a closed subsystem of the STV-ODE of order . The following describes this nested structure of the STV-ODE in general.
Theorem 13 (Partial statement of Theorem 44).
Assume a smooth solution of (1.2)–(1.5) is expanded in even powers of as in (2.21)–(2.24). Then can be re-expressed in terms of , and can be re-expressed in terms of and , to form, at each order , a system of ODE
| (2.36) |
in unknowns
where
Moreover, system (2.36) takes the component form
| (2.45) |
where
| (2.48) |
depends only on and depends only on lower order terms:
for each .
The STV-ODE of order all admit the rest points and . The coordinates of the rest point are obtained by expanding the self-similar formulation of the Friedmann spacetime in even powers of about the center. Alternatively, since the Friedmann spacetime is a time independent solution of the STV-PDE, it follows that the resulting expansion gives the coordinates of the rest point at every order. The rest point , which represents Minkowski spacetime in the limit , , has zeros in all entries except for a in the (second) -entry, that is, . It is easy to verify is a rest point by induction using (2.45). We record the rest points and , together with their eigenpairs as follows.
Theorem 14.
Each STV-ODE of order admit the rest points:
| (2.49) |
The rest point is a degenerate stable rest point with one eigenvalue and one eigenvector given by:
| (2.50) |
The eigenvalues of , computable directly from (2.48), are given by:
| (2.51) |
The corresponding eigenvectors up to order are given by:
| (2.52) | ||||||
| (2.53) | ||||||
| (2.54) | ||||||
| (2.55) |
Theorem 14 follows from the calculations given in Section 9 below. A few comments are in order. To verify that is a rest point of the STV-ODE at every order is a straightforward induction argument based on setting the right hand side of the STV-ODE (2.45) to zero and applying induction on . That it is a degenerate stable rest point with one eigenvalue and one eigenvector given by (2.50) can be verified again by induction based on computing from (2.48) and using the nested property of equations (2.45). The components of the rest point can be computed two different ways: First, by setting the right hand side of the STV-ODE (2.45) to zero and computing the zeros of in (2.48), assuming , and second, they can be computed by expanding the self-similar form of the Friedmann spacetime (2.17)–(2.20) in even powers of , such as is done in Section 12.
The SSCNG gauge, imposed in (2.25), still leaves open one last freedom in the SSCNG coordinate ansatz, namely, the invariance associated with time translation , a transformation which preserves proper time at . This represents a redundancy of physical solutions of the STV-PDE and STV-ODE. We fix this gauge freedom for each solution separately by defining time since the Big Bang, that is, so the leading order solution agrees with or one of the trajectories in its unstable manifold, and hence agrees with a unique Friedmann spacetime in the STV-ODE of order . From this, the of higher order then characterize accelerations away from Friedmann spacetimes. The change of gauge to time since the Big Bang is developed carefully in Section 4. The general result is stated in the following lemma.
Lemma 15.
Let denote an arbitrary outgoing smooth solution of the STV-PDE (1.2)–(1.5) in SSCNG coordinates and let denote the transformed solution of (1.2)–(1.5) obtained by making the NG gauge transformation:
so that
Then for any given , there exists a unique time translation such that the leading order part of is a solution which lies on the trajectories corresponding to the unstable manifold of or else agrees with itself.
The proof of Lemma 15 follows from calculations given in Section 4. Lemma 15 implies that the transformation maps solutions to solutions, and hence maps trajectories in at order to trajectories in for every . Note that the scaling , which converts the STV-ODE to an autonomous system, only exists for , so in this sense the mapping does not in general map the entire solution on one trajectory to the entire solution on another, as represented in the phase portrait of the autonomous system described in Figure 1, but rather transformed trajectories end at the rest point . Nevertheless, after we accomplish the transformation to time since the Big Bang, we recover the whole Friedmann solution, so in the end this does not represent a real problem for this theory. Lemma 15 also tells us that imposing time since the Big Bang places the trajectory of a solution in at , or on one of the two trajectories in the unstable manifold of at order . To study underdense perturbations of , we now always assume time since the Big Bang is imposed and restrict to the space of solutions of the STV-ODE whose leading order trajectory is the connecting orbit that takes to in the leading order phase portrait diagrammed in Figure 2. In other words, we restrict to which satisfy
for some , where determines the Friedmann spacetime to which it agrees at leading order. The next theorem tells us that trajectories in tend to the rest point at all orders of the STV-ODE and provides a rate of decay.
Theorem 16 (Informal statement of Corollary 46).
Let be a solution of the STV-ODE (2.45) of order such that
Then
as a solution of the STV-ODE at every higher order . Moreover, there exists constants such that:
| (2.56) | ||||||
| (2.57) |
where for each , depends only on initial data assigned at ,
that is, depends only on the initial data up to order .
In other words, Theorem 16 tells us that if a trajectory tends to at leading order, then it tends to at all orders. Note that if the in (2.56)–(2.57) are bounded by a uniform constant for every , then we can sum the geometric series and obtain an error in the approximation over all orders (assuming ):
| (2.58) |
where
| (2.59) |
Summing the geometric series in (2.59) then gives us a formula for the rate at which an underlying solution of the STV-PDE decays to .
It follows from Lemma 15 that to characterize underdense perturbations of the Friedmann spacetime, we can assume the time since the Big Bang gauge and define the family as the set of all solutions of the STV-PDE which lie on the trajectory that takes to in the leading order STV-ODE of order . In this gauge, measures time since the Big Bang in the sense that , where is the scale factor associated with the Friedmann spacetime it agrees with at leading order [1].
Recall that , also referred to as at order , is the set of solutions of the STV-ODE of order which satisfy the property
for some , that is, solutions which take to at order . Recall also that the family , referred to as the set of trajectories in at order , is the subset of in the unstable manifold of at order . The following theorem describes how solutions in generically accelerate away from Friedmann spacetimes at every order by characterizing the global dynamics of solutions in terms of the eigenvalues of and its unstable manifold . Since all smooth radial underdense perturbations of evolve within the space of trajectories , we interpret this as a quantitative characterization of the instability of the , Friedmann spacetime to smooth radial underdense perturbations.
Theorem 17.
Let denote a solution of the STV-ODE (2.36) of order in the family so that
for some . Then:
-
(i)
Trajectories in the unstable manifold of generically diverge from Friedmann spacetimes in the phase portrait of the STV-ODE of order , and hence, by the nested property of the STV-ODE, they generically diverge from Friedmann at all orders as well.
-
(ii)
The character of the unstable manifold of is determined at order in the sense that a solution is in the unstable manifold at all orders if and only if it is in , that is, if and only if is in the unstable manifold of at order . This implies the unstable manifold is a codimension one set of trajectories in at every order of the STV-ODE.
-
(iii)
By definition, solutions in all satisfy but generically .
-
(iv)
The smallest positive eigenvalue at emerges at order in (followed by at ). This implies that solution trajectories in enter tangent to the Friedmann trajectory at order (and thus also ) but enter tangent to the eigenvector of at all higher orders .
For point (i), this follows directly from the presence of two distinct positive eigenvalues and at in the STV-ODE of order . These determine two independent eigendirections in the unstable manifold of at order , with only the eigendirection of corresponding to Friedmann spacetimes.
For point (ii), this follows directly from the fact that there exists only a single negative eigenvalue at at order and all higher order eigenvalues and for are positive.
For point (iii), this follows directly from the presence of the single negative eigenvalue above level . We interpret this as establishing that, unlike Friedmann spacetimes, solutions in exhibit a self-similar Big Bang only at leading order but generically do not at higher orders.
3 Smoothness at the Center of Spherically Symmetric Spacetimes in SSCNG Coordinates
Our goal is to characterize the instability of the , Friedmann spacetime to perturbations within the class of smooth solutions. Since is a singular value in radial coordinates, we need a condition characterizing smoothness at the center () in SSC (1.1). The results of this paper rely on the validity of approximating solutions by finite Taylor expansions about the center of symmetry, so the main issue is to guarantee that solutions are indeed smooth in a neighborhood of the center.
The Universe is not smooth on small scales, so our assumption is that the center is not special regarding the regularity assumed in the large scale approximation of the Universe. Smoothness, by which we mean derivatives of all orders can be taken, at a point in a spacetime manifold is determined by the atlas of coordinate charts defined in a neighborhood of . The regularity of tensors is identified with the regularity of tensor components expressed in the coordinate systems of the given atlas. Now spherically symmetric solutions given, in say, Lemaître–Tolman–Bondi (LTB) or SSC employ spherical coordinates for the spacelike surfaces at constant time. The subtly here is that is a coordinate singularity in spherical coordinates and functions are defined only for the radial coordinate , however, a coordinate system must be specified in a neighborhood of to impose the conditions for smoothness at the center. Of course, once we have the metric represented as smooth in coordinate system on an initial data surface in a neighborhood of , the local existence theorem giving the smooth evolution of solutions from smooth initial data for the Einstein field equations would not alone suffice to obtain our smoothness condition, as one would still have to prove that this evolution preserved the metric ansatz.
Following [29], we begin by showing that this issue can be resolved relatively easily in SSC because the SSC are precisely the spherical coordinates associated with Euclidean coordinate charts defined in a neighborhood of . Based on this, we show below that the condition for smoothness of metric components and functions in SSC is simply that all odd order derivatives should vanish at .
Consider in more detail the problem of representing a smooth, spherically symmetric perturbation of a Friedman spacetime. To start, assume the existence of a solution of Einstein’s field equations representing a large, smooth underdense region of spacetime that expands from the end of the Radiation Dominated Epoch out to present time. For smooth perturbations, there should exist a coordinate system in a neighborhood of the center of symmetry, in which the solution is represented as smooth. Assume we have such a coordinate system , with at the center, and use the notation
Spherical symmetry makes it convenient to represent the spatial Euclidean coordinates in spherical coordinates , with . Since generically, any spherically symmetric metric can be transformed locally to SSC form [31], we assume the spacetime represented in the coordinate system takes the SSC form (1.1). This is equivalent to the metric in Euclidean coordinates taking the form
where:
| (3.1) |
and
| (3.2) |
To guarantee the smoothness of our perturbation of Friedman at the center, we assume a gauge in which:
so that also
where the smoothness of is equivalent to the smoothness of for . This sets the SSC time gauge to proper time at and makes the SSC locally inertial at and , a first step in guaranteeing that our spherical perturbations of Friedman are smooth at the center. Keep in mind that without this gauge the SSC form is invariant under arbitrary transformation of time, so we are free to choose proper time at . The locally inertial condition at simply imposes that the corrections to Minkowski at are second order in , in particular, the SSC metric (5.29) tends to Minkowski as . These assumptions make physical sense and their consistency is guaranteed by reversing the steps in the argument to follow. We now ask what conditions on the metric functions and are imposed by assuming the SSC metric be smooth when expressed in our original Euclidean coordinate chart defined in a neighborhood of a point at , .
To transform the SSC metric (5.29) to coordinates, use (3.2) to eliminate the term and (3.1) to eliminate the term to obtain
| (3.3) | ||||
The smoothness of is equivalent to the smoothness of , and the smoothness of and for guarantees the smoothness of the Euclidean spacetime metric (3.3) in coordinates everywhere except at . For smoothness at , we impose the condition that the metric components in (3.3) should be smooth functions of at as well. Note again that imposing smoothness in coordinates at is correct in the sense that it is preserved by the Einstein evolution equations. We now show that smoothness at in this sense is equivalent to requiring that the metric functions and satisfy the condition that all odd -derivatives vanish at . To see this, observe that a function represents a smooth spherically symmetric function of the Euclidean coordinates at if and only if the function
is smooth at . Assuming is smooth for (by which we mean is smooth for , and one sided derivatives exist at ) and taking the derivative of from the left and right and setting them equal gives the smoothness condition
We state this formally in the following lemma (see [29]).
Lemma 18.
A function of the radial coordinate represents a smooth function of the Euclidean coordinates if and only if is smooth for and all odd derivatives vanish at . Moreover, if any odd derivative , then has a jump discontinuity in its derivative, and hence a kink singularity in its derivative at .
As an immediate consequence, we obtain the condition for smoothness of SSC metrics at , given in the following corollary.
Corollary 19.
To conclude, solutions of the Einstein field equations in SSC have four unknowns: The metric components and , the density and the scalar velocity . It is easy to show that if the SSC metric components satisfy the condition that all odd order -derivatives vanish at , then the components of the unit four-velocity vector associated with smooth curves that pass through will have the same property.161616This implies that the coordinates are smooth functions of arc-length along curves passing through . Moreover, the scalar velocity will have the property that all even derivatives vanish at because is an outward velocity which picks up a change of sign when represented in coordinates. Thus smoothness of SSC solutions at at fixed time is equivalent to requiring that the metric components satisfy the condition that all odd -derivatives vanish at . These then give conditions on SSC solutions equivalent to the condition that the solutions are smooth in the ambient Euclidean coordinate system . Theorem 34 of Section 7 proves that smoothness in the coordinate system at at each in this sense is preserved by the Einstein evolution equations for SSC metrics when . In particular, this demonstrates that our condition for smoothness of SSC metrics at is equivalent to the well-posedness of solutions in the ambient Euclidean coordinates defined in a neighborhood of . Thus we obtain the condition for smoothness of SSC metrics at based on the Euclidean coordinate systems associated with SSC and show this is preserved by the evolution of the Einstein field equations. Since smoothness of the SSC metric components in this sense is equivalent to smoothness of the -coordinates with respect to arc-length along curves passing through , in this sense, our condition for smoothness is geometric.
4 Time Since the Big Bang
The SSC-PDE self-similar form of the Einstein field equations for spherically symmetric dust () spacetimes has the advantage that the time translation freedom of the SSC metric ansatz enables one to scale the time so that the Big Bang singularity for a general smooth solution agrees with a Friedmann spacetime at leading order for some value of . We establish this directly now with an argument based on the STV-ODE of order , namely:
| (4.1) | ||||
| (4.2) |
where:
Solutions of (4.1)–(4.2) give the leading order approximation:
Consider now the effect of a time translation and set
so that:
Thus it makes sense at leading order to define:
Given that the SSC metric form is invariant under time translation and the SSC-PDE and SSC-ODE faithfully represent the SSC solutions in coordinates, we should expect that should solve the leading order equations (4.1)–(4.2) if and only if do. It suffices to verify that if solve (4.1)–(4.2), then do. To this end, assuming a solution and substituting into (4.1)–(4.2), we obtain
and
We conclude that equations (4.1)–(4.2) are invariant under the transformation:
| (4.3) |
Using (4.3) we can give a rigorous proof that every solution of the STV-ODE agrees with a Friedmann solution at leading order . For this it suffices to prove that for each solution of (4.1)–(4.2), the STV-ODE of order , there exists a time translation , that is, time since the Big Bang, such that (4.3) transforms to , where the latter lies on the trajectory corresponding to the point or to one of the two trajectories in the unstable manifold of , see Figure 1. But this follows directly from (4.3) by simply verifying for each solution that there exists a value such that
This alone implies the transformed solution lies in the unstable manifold of and hence agrees with a Friedmann solution for some value of , at the level of the STV-ODE of order . To verify this, it suffices to argue conversely by assume a solution is , or in the unstable manifold of , and finding a time translation sufficient to impose any non-singular initial condition. For example, starting with , it is easy to see one can translate to to obtain any initial condition on the trajectory taking to (see Figure 1), implying, more generally, that time since the Big Bang takes the stable manifold of to the rest point itself. Similarly, starting with a solution on a trajectory connecting to , it is not difficult to find a time translation sufficient to set any initial condition on any trajectory on the underdense side of the two trajectories in the stable manifold of and similarly on the underdense side. We conclude that since any initial condition away from a rest point can be imposed by some time translation of a trajectory in the unstable manifold of , the converse is true, that an inverse time translation will transform an arbitrary non-rest point trajectory to or one of the two trajectories in the unstable manifold of at order . From this it follows that imposing the time translation gauge time since the Big Bang is equivalent to assuming solutions lie on or traverse one of the trajectories in its unstable manifold. The space of smooth solutions underdense with respect to the Friedmann spacetime, identified in this paper, defined by the condition that solutions lie on the trajectory which takes rest point to rest point in the phase portrait of the STV-ODE of order , automatically imposes time since the Big Bang because this is the underdense trajectory in the unstable manifold of . Note that the nested structure of the STV-ODE implies that initial conditions for variables at higher order can still be freely assigned.
5 The Friedmann Spacetimes in SSCNG
In this section we review the Friedmann spacetimes of Cosmology. In Section 5.1 we review the Friedmann spacetimes and their cosmological interpretation. In Section 5.2 we discuss the instability of the Friedmann metric within the space of Friedmann metrics for general , in the case with and , and record the exact formulas for Friedmann solutions we employ in the analysis to follow. In Section 5.3 we derive formulas for the unique coordinate transformation which takes a general Friedmann metric given in comoving coordinates to SSCNG coordinates.
Remark 20.
To keep the notation to a minimum, in Sections 5 to 7 we change our notation and let denote the standard comoving coordinate system for Friedmann spacetimes and use barred coordinates for SSCNG systems. In Section 8 we begin the analysis of general solutions to the Einstein field equations in SSCNG coordinates, and from that point on, do not refer to comoving coordinates. Thus from Section 8 on, we return to the notation of Sections 1 to 3 in which unbarred coordinates denote SSCNG, that is, coordinates in which a metric takes the form (1.1). The exception is Section 12, where again denote SSCNG.
5.1 The Friedmann Spacetimes in Cosmology
The Friedmann metric with curvature parameter in comoving coordinates takes the form
| (5.1) |
where is the cosmological scale factor, is the curvature parameter, gives the radial geodesics and measures arc-length distance at fixed [34]. Recall that (5.1) is invariant under the scaling:
| (5.2) |
for any . Note that (defined below) and are invariant under rescaling but and are not. Taking rescales the Friedmann metric (with arbitrary ) into its standard form, that is, in which and with the metric taking the form
| (5.3) |
where . That is, for any given and , the Friedmann spacetime is equivalent to one of the three forms (5.3), but a given depends on the initial conditions for the Einstein field equations. The Einstein field equations for Friedmann metrics (5.1) take the form
| (5.4) | ||||
| (5.5) |
where
is the Hubble constant, a function which evolves in time. In a cosmological model, solutions of (5.4)–(5.5) are to be determined from the measurable quantities at present time in the Universe, namely:
| (5.6) |
where is present time. The age of the Universe is , where and is the Big Bang. The problem then is to determine from (5.6). Assuming an equation of state , this is done formally as follows: First, solving for in (5.4) and substituting into (5.5) yields the system
| (5.7) | ||||
| (5.8) |
a autonomous system of ODE for each fixed , admitting the scaling law (5.2) which preserves solutions. We can account for the scaling law in the solution of the initial value problem formally in one of two ways.
For the first way, we scale into and consider the initial value problem for:
| (5.9) | ||||
| (5.10) |
We then use (5.7) to determine from and by
| (5.11) |
Once is fixed, (5.9)–(5.10) is again a fixed autonomous system of ODE which has a unique solution for initial conditions and (we introduce the variable here only to later set ). Moreover, being autonomous, solution trajectories are distinct, time translation preserves solutions and time translation suffices to meet all initial conditions on each trajectory. In the cosmological problem, given and , we use in equation (5.7) to solve for . Then determines a unique solution of (5.7)–(5.8) for any given time . The time of the Big Bang, , is the time when and the age of the Universe is . Setting , our solution as a function of time since the Big Bang , is given in terms of our original solutions by making the time translation . Obtaining solutions of the initial value problem this way, it is clear that there is a unique cosmological model for each and , but it is difficult to see that the solution, and age of the Universe, depend continuously on and because is discontinuous at . For this we can view it a second way.
For the second way, we keep the free parameter in system (5.7)–(5.8) so that we can continuously take . To start, fix an arbitrary starting time and impose initial conditions , and . Using this in (5.7) determines by
| (5.12) |
Once is fixed, (5.7)–(5.8) is a fixed autonomous system of ODE which has a unique solution for initial conditions and . Again, being autonomous, solution trajectories are distinct, time translation preserves solutions and time translation suffices to meet all initial conditions on each trajectory. Letting be the time when , we can let and make the time translation and to obtain solutions as functions of . Then , , measures time since the Big Bang and gives the age of the Universe. The advantage of this second way to view the initial value problem, is that the right hand side of system (5.7)–(5.8) is a smooth function , and hence solutions depend continuously on . Thus, the Friedmann solutions constructed as above to satisfy have the property that and all depend continuously on at fixed .
Although Friedmann solutions depend continuously on at each time , the Friedmann solution is unstable within the Friedmann family of spacetimes with arbitrary . The purpose of this paper is to characterize the instability of Friedmann within the general class of spherically symmetric solutions of the Einstein field equations which are smooth at the center. To incorporate the Friedmann family into this more general framework, we will adopt the first approach outlined above, that is, the approach based on rescaling to .
5.2 Instability of Friedmann Within the Friedmann Family
We now derive exact solutions of the Friedmann equations (5.7)–(5.8) assuming the equation of state with constant and . Note that the case corresponds to a radiation-dominated universe and corresponds to a (pressureless) matter-dominated universe. It is also worth noting that under the assumptions of spherical symmetry and self-similarity, such as the case for the critical Friedman spacetime, a generic barotropic equation of state is restricted to the form for some constant [3]. For such an equation of state, the Friedmann equations take the form:
| (5.13) | ||||
| (5.14) |
noting that we only consider the case . Equation (5.14) implies
| (5.15) |
which integrates to
| (5.16) |
so is constant along solutions. Following [1], we set the constant to
| (5.17) |
As noted in [1], in the case and , taking units , we see that
| (5.18) |
has the physical interpretation as the total mass of the Universe. The case and is the mass of the ball of radius . Note also that
is a formal expression for the Schwarzschild radius.
Using (5.17) gives
| (5.19) |
and using this in (5.13) gives the scalar equation
| (5.20) |
The acceleration parameter (which determines the quadratic correction to redshift vs luminosity) is then given by
| (5.21) |
We can now discuss, formally, the instability of the critical Friedmann spacetimes within the space of Friedmann spacetimes when . For this, we note that (5.13) gives
or
| (5.22) |
where
Thus, if at a given time the Universe is near critical expansion (), then . Therefore by (5.22), when , in positive time, and in the case , at the maximum value of [1]. This gives a formal expression to the instability of critical expansion within the Friedmann family of spacetimes.
Our goal now is to express the instability of the Friedmann spacetime rigorously within a phase portrait, which we do by first transforming the Friedmann spacetimes to SSCNG coordinates. Recall that SSCNG coordinates are coordinates in which the metric takes the SSC form (5.29) and employs a special normalized gauge (NG). In SSCNG coordinates, the instability can be expressed simply and rigorously in a phase portrait based on the self-similar variable associated with SSCNG coordinates . The result is a rigorous characterization of the instability of the Friedmann spacetime to smooth spherically symmetric perturbations in the cosmologically significant case . We show that, in this phase portrait, the Friedmann spacetimes (5.23) and (5.27) correspond to two trajectories in the unstable manifold of the rest point (corresponding to Friedmann), but the unstable manifold has one extra degree of freedom over and above perturbations which are Friedmann solutions. This extra degree of freedom naturally replaces the one degree of freedom offered by the cosmological constant in predicting redshift vs luminosity observations.
To accomplish this, we use the following well known formulas for exact solutions of the Friedmann equations when and (see [1] pages 433–437).
5.3 Transforming Friedmann to SSCNG Coordinates
We now consider the Friedmann metrics (5.1) and derive the explicit coordinate transformation that puts them into SSC form
| (5.29) |
such that they meet the normalized gauge condition . Note that the SSC metric form has the gauge freedom for any smooth invertible function , so specifying proper time at fixes the functions and uniquely. Note also that the comoving metric form (5.1) is invariant under the transformation:
which preserves . It follows that without loss of generality we can assume .
Our strategy for finding the change of variables which takes (5.1) to (5.29) with normalized gauge is as follows. We first find an explicit formula for a unique coordinate transformation taking (5.1) to (5.29) of the separable solvable form
and then we apply a change of gauge
which fixes the normalized gauge condition . This is because the total time change to SSCNG is not separable. Now the SSC metric form is invariant under arbitrary changes of time and thus it follows that the transformation:
| (5.30) |
will also take the Friedmann metric (5.1) to SSC form (5.29). Applying is thus an arbitrary gauge transformation. We now identify the gauge transformation such that . We have that when ,
It is straightforward to derive the condition on so that the transformation (5.30) puts Friedmann in SSC with normalized gauge for every , namely
Thus the condition is
or
Therefore, letting and assuming the invertibility of , gives , so we conclude
We can now state and prove the main theorem of this section, which provides an explicit formula for the coordinate transformation taking Friedmann metrics in comoving coordinates to Friedmann metrics in SSCNG coordinates.
Theorem 22.
Define the coordinate transformation:
| (5.31) |
where:
| (5.32) | ||||
| (5.33) | ||||
| (5.34) |
and and are the cosmological scale factor and curvature parameter, respectively, of a Friedmann metric (5.1). Then for any (we take below), (5.31) transforms the Friedmann metric (5.1) over to SSC form (5.29) with normalized gauge condition
and the transformed SSCNG metric components are given by:
| (5.35) | ||||
| (5.36) |
where . Moreover, we have:
| (5.37) | ||||
| (5.38) |
where is the SSCNG coordinate fluid velocity.171717Note that (5.35) and (5.36) agree with equation (2.19) of [26].
We now use Theorem 22 to write the Friedmann spacetimes in SSCNG coordinates . We consider first the case . Formulas (5.23)–(5.28) give implicit formulas for the Friedmann spacetimes in comoving coordinates , where we recall
Keep in mind that when , different values of do not correspond to a gauge transformation, but instead describe distinct Friedmann solutions. The variable in (5.23)–(5.28) represents proper time at fixed for all values of and .
To display the dependence of the Friedmann spacetimes on , we use the notation:
In the derivations below, we work to express the functions , , and of the Friedmann solutions in SSCNG coordinates as functions of . This is accomplished in Theorem 24. The result shows that the dependence of a Friedmann solution on the variables , and is through . Most importantly, because , , and depend on only through in SSCNG, it follows that the free parameter in Friedmann spacetimes corresponds to the mapping of smooth solutions to smooth solutions implemented by replacing by , holding fixed. Anticipating what is to come next, we call this log-time translation, because changing corresponds to the log-time translation . In particular, we use this below to establish that the Friedmann solutions each lie on a unique trajectory of the STV-ODE (derived below) at every order , respectively, by showing that this corresponds to time translation in an autonomous system obtained by using log-time in place of .
We begin in the next section by establishing the domain of validity of the SSCNG coordinate transformation. From this point onward, we focus on the main case of interest to this paper, the case . Analogous formulas follow for the case with straightforward modification. When , the Friedmann spacetimes in comoving coordinates are described by the exact formulas (5.23) and (5.24).
5.4 The SSCNG Coordinate System for
In this subsection we transform (5.23)–(5.24) over to SSCNG coordinates and characterize the region of validity of the transformation. For this we find a simple expression for
| (5.39) |
in (5.31), where and are given by (5.33) to be:
| (5.40) | ||||
| (5.41) |
and where is defined implicitly by (5.23)–(5.24). We start by recording the following expressions, which follow directly from (5.23)–(5.24):
| (5.42) | ||||
| (5.43) | ||||
| (5.44) | ||||
| (5.45) | ||||
| (5.46) |
We next record that by (5.43), (5.23) and (5.24), we have
and using this in (5.43) gives a formula for in terms of , namely
Using this in (5.40), we obtain
Now let
so that
Substitution yields
and using this in (5.40) gives
To make the transformation as simple as possible, from here on we assume
| (5.47) |
which gives:
| (5.48) | ||||
| (5.49) | ||||
| (5.50) |
We can now use (5.48)–(5.50) to obtain a formula for as a function of using (5.23) in the form
where . But at this stage, in order to connect to log-time translation of the STV-PDE derived below, it is important to make clear the dependence of the coordinates and on . We thus define:
Using this notation, (5.23) becomes
which inverts to
With this notation, (5.48) takes the form
so (5.50) becomes:
or
Thus in summary, with gives the transformation from at each value of , as:
| (5.51) | ||||
| (5.52) |
Finally, using (5.24), we obtain the following fundamental relation between and at each value of and
| (5.53) |
We now show that equation (5.53) defines for all points inside the black hole [25], which includes all points within the Hubble radius. This is made precise in the following lemma.
Lemma 23.
Proof.
Note that (5.53) gives at , so by continuity, we can solve for in a neighborhood of . To determine how far this extends, we write and so that formula (5.53) is equivalent to
To extend the solubility near by virtue of the implicit function theorem, it suffices to obtain a condition for . Thus we compute
| (5.57) |
where we have used the identity
together with (5.24). By (5.57), the condition is equivalent to , and since is a monotone function of , this together with the implicit function theorem establishes (5.55).
We now prove the main theorem of this subsection, which shows that the transformation from comoving coordinates to SSCNG coordinates is a transformation of the form , where , and is the free parameter (5.17). The significance of this is that the free parameter is incorporated into the SSCNG coordinate system as a rescaling of time, holding both and fixed. As a consequence, when , a change of is not a coordinate gauge transformation, but describes a transformation between physically different solutions (note that we consider the case , a similar result for the case can be obtained similarly).
Theorem 24.
In the case of the Friedmann spacetime, the dependent mapping from comoving coordinates to SSCNG coordinates is determined by the transformation181818That is, .
| (5.60) |
which is a regular coordinate mapping uniquely given implicitly by:
| (5.61) | ||||
| (5.62) |
under the solubility condition
| (5.63) |
That is, (5.61) determines by (5.54), where , , is the free parameter (5.17) and the function is determined by inverting
| (5.64) |
according to the formula (5.23). Moreover, the Friedmann solution in SSCNG coordinates is given by the formulas:
| (5.65) | ||||
| (5.66) | ||||
| (5.67) |
The main point of Theorem 24 is that it shows the Friedmann solution for is obtained from the solution for by simply making the transformation and , holding and fixed. That is, , and are explicit functions which describe the dependence of the Friedmann solution on the variables . As a consequence, the dependence on is through in (5.65)–(5.67) and this implies that changing the free parameter from in Friedmann spacetimes corresponds to the mapping of smooth solutions to smooth solutions implemented by replacing by holding fixed. We call this log-time translation, since changing from corresponds to the log-time translation . We use this to establish that the Friedmann solutions each lie on a unique trajectory of the STV-ODE (derived below) at every order , respectively, by showing that this corresponds to time translation in an autonomous system obtained by using log-time in place of .
Proof of Theorem 24.
In the case the formulas (5.23)–(5.24) describe the Friedmann spacetimes in comoving coordinate . Equation (5.61) is (5.53), so Lemma 23 implies that is uniquely determined by (5.61) when . Equation (5.62) comes from solving
for , which gives since is determined already by (5.61) alone. It follows that (5.61)–(5.62) determine and uniquely, and these invert to give the regular mapping when . To verify (5.65)–(5.67), consider first the metric component given in (13.27). Using (5.58, we can write (13.27) as (5.59). Thus by (5.23) and (5.54), we have
Regarding equations (5.66) and (5.67), note that the first equalities in (5.66) and (5.67) follow directly from (5.37) and (5.38) upon setting , as assumed in (5.47), and the remaining equalities in (5.66) and (5.67) follow directly from these. ∎
5.5 The Hubble Radius Relative to the SSCNG Coordinate System
In this section we characterize the condition (5.55) for the validity of the SSCNG coordinate system in terms of the SSCNG variable for the Friedmann spacetimes. We make use of this in subsequent sections when we expand solutions in powers of at fixed SSCNG time . The main result shows that the SSCNG coordinate system is valid for , where increases from to as (and ) go from , and the region includes the physical extent of the Friedmann spacetime to out beyond the Hubble radius. We begin with the following lemma.
Lemma 25.
Letting denote the Hubble radius at time (a standard measure of the size of the visible Universe) and the distance to at time in comoving coordinates , we have
| (5.68) |
for all , so (5.55) guarantees a mapping between at all points within the Hubble radius.
Proof.
First, to convert into a distance, we write . We loosely call this the distance to the black hole and view it as a measure of the distance from the origin to the point where in SSC at fixed time . We now compare this distance to the usual Hubble radius , a measure of the size of the visible Universe. From (5.23)–(5.24), using , we have:
so
| (5.69) |
Since both and at , this directly implies for all and . Integrating (5.69) then gives
From this we conclude
as claimed in (5.68). ∎
We now prove the following theorem, which implies that it is valid to expand the Friedmann solution in powers of at each fixed , out to , where tends to as and increases monotonically to as .
Theorem 26.
The SSCNG coordinate system defines a regular transformation of the Friedmann spacetimes so long as , and this is equivalent to the condition
| (5.70) |
where
| (5.71) |
and is defined by inverting
| (5.72) |
Moreover, is an increasing function
| (5.73) |
and satisfies:
| (5.74) | ||||
| (5.75) |
so increases continuously from to as increases from to .
For the proof of Theorem 26, we begin by establishing (5.74) and (5.75) in two separate lemmas. The first lemma establishes that the limit of validity of the SSCNG coordinate system, , extends out to in the limit . This implies that it is possible to Taylor expand solutions in powers of out to any at arbitrarily late times after the Big Bang. The second lemma establishes as , which, after establishing (5.73), is the global lower bound for .
Lemma 27.
The relationship between and , determined by (5.53), tends to the condition
| (5.76) |
in the limit . This implies that the SSCNG coordinate system is valid for
| (5.77) |
in the limit .
Proof.
By (5.23), we have that as , and
since
where, for this argument, we use the convention if they agree up to lower order terms as . Using this in (5.53) gives
which yields
or
| (5.78) |
Since as , and
as , we have
so (5.78) becomes
| (5.79) |
Thus in the limit , the solubility condition for as a function of and becomes (5.79), which is the condition as claimed in (5.77). This completes the proof of Lemma 27. ∎
The next lemma establishes that the limit of validity of the SSCNG coordinate system extends out to asymptotically as , implying that it makes sense to Taylor expand solutions in powers of out to any at sufficiently early times after the Big Bang.
Lemma 28.
In the limit , the relationship between and , determined by (5.53), reduces to
| (5.80) |
which has a unique solution
| (5.81) |
for each
| (5.82) |
Proof.
By (5.23), in the limit , the following asymptotic conditions hold:
Taking these as exact, that is, neglecting higher order terms, (5.53) becomes
Upon eliminating the radical, taking the leading order part on the left hand side and using
gives
Taking the leading order part (in ) of the expression on the right hand side and clearing fractions yields
so dividing through by results in
| (5.83) |
Equation (5.83) is the leading order part of equation (5.53) in the limit , and so implicitly gives as a function of for each within the range of solubility. Now let
so (5.83) is equivalent to
| (5.84) |
Now we know from (5.53) that and at . Thus the possible values of are restricted by the condition that there should exist a such that (5.84) holds. Continuity from , , implies that we should take the value of which solves (5.84) for the largest value of . We have for , and the maximum value occurs at , so
It follows from (5.84) that we can only solve for under the condition
or equivalently
as claimed in (5.82). It follows that in the limit , the transformation is at each value of , where is the constant determined by the solution of (5.84). This completes the proof of Lemma 28. ∎
Proof of Theorem 26.
By (5.55) of Lemma 5.54, we have that the maximal radius of the SSCNG coordinate system, the region , is described by
| (5.85) |
Then at the maximum radius , the relation (5.53), which implicitly defines as a function of , becomes
which reduces to
| (5.86) |
Equation (5.85) gives the relationship between and at the maximum radius . Putting this in for on the left hand side of (5.53) gives
which simplifies to
| (5.87) |
Using (5.86) to eliminate in favor of gives the relationship between and at the maximum radius. Letting denote this maximum, (5.87) implies
where . We now claim
| (5.88) |
Assuming (5.88), the maximum and minimum values of in (5.75) and (5.74) then follow directly from Lemmas 27 and 28 by evaluating at and . To prove (5.88), we use the quotient rule, pull out a positive factor and use to obtain
| (5.89) |
Now
and putting this into (5.89) gives for if and only if
| (5.90) |
To finish the proof of the claim, it suffices to establish (5.90) by proving:
for , where
| (5.91) |
Clearly as , and differentiating (5.91) we obtain:
where we have set
Now the minimum of for is at , at which , so for , implying that for , as claimed. This completes the proof of Theorem 26. ∎
To get an upper bound on the size of the region in which our SSCNG coordinate system is nonsingular, we compare to , that is, the distance at time of an outward radial light ray leaving the origin at in comoving coordinates in a Friedmann spacetime. The null condition gives
or
The integral on the left is soluble by the substitution (5.23), giving . Using (5.24) then yields
The integral on the right has the exact solution
Thus the radial light ray is given by
or
Therefore we conclude that at time ,
Hence we have the upper and lower bounds at each time ,
Finally, asymptotically as , we have
so
Of course, would name a spacetime point well beyond the region of the Universe visible to an observer at at time in the Friedmann spacetime.
6 Self-Similarity of the Standard Model in SSCNG
The purpose of this section is to derive the self-similar form of the , Friedmann spacetimes in SSCNG, that is, coordinates in which the metric takes the SSC form (5.29) such that the time coordinate is normalized to proper time (recall this means ). Even though we only fully address the instability of in the case of zero pressure, , for completeness, and future reference, we derive self-similar forms of the Friedmann spacetimes in the more general case with . We show that the Friedmann metric is self-similar in the sense that, when written in SSCNG, the metric components and fluid variables and depend only on the self-similar variable . In other words, as a function of , the SSCNG components of the Friedmann spacetimes are time independent. Our goal is to study the stability of the , Friedmann spacetimes by deriving the equations for spherically symmetric spacetimes in SSCNG coordinates expressed in variables . We Taylor expand the equations about the origin and obtain a phase portrait with the knowledge ahead of time that the Friedmann spacetimes must show up as a rest point in these coordinates.
We begin by stating Theorem 2, on page 88 of [26] regarding the Friedmann spacetime with and . Note that typically and we set when convenient.
Theorem 29.
In comoving coordinates, the Friedmann metric takes the standard form
| (6.1) |
and the Einstein field equations
| (6.2) |
for a perfect fluid
| (6.3) |
reduce to the following system of ODE:
| (6.4) | ||||
| (6.5) |
where
is the Hubble constant, is the pressure, is the energy density and is the fluid four-velocity.
In the case with constant (equivalently ), assuming , and , equations (6.4)–(6.5) determine to be
| (6.6) |
where
The resulting solution of (6.4)–(6.5) is given by:
| (6.7) | ||||
| (6.8) |
and by the comoving assumption, the four velocity satisfies
Furthermore, the age of the Universe, , and the infinite red shift limit, , are given exactly by:
The formulas in Theorem 29 follow directly from (5.13)–(5.17) and one can easily verify that the free constant is related to the parameter defined in (5.17) by
| (6.9) |
In particular, when we have , so
and when we have , so
Our goal now is to prove the following theorem, which establishes the unique coordinate system in which the , Friedmann metric (6.1) takes the SSC form
such that the metric components and , together with appropriately scaled expressions for the density and velocity, all depend only on the self-similar variable . For continuity, we employ the notation of [29].
Theorem 30.
Let denote comoving coordinates for the Friedmann metric (6.1) assuming the equation of state with constant , and define coordinates by:
| (6.10) |
where
| (6.11) |
Then the Friedmann metric (6.1) written in -coordinates is given by
| (6.12) |
where the metric components , , and
are functions of the single variable according to:
| (6.13) | ||||
| (6.14) | ||||
| (6.15) | ||||
| (6.16) |
Moreover, is given implicitly as a function of by the the relation
| (6.17) |
which inverts to
| (6.18) |
by expanding about . This determines the following asymptotic expansions for , , and as functions of in a neighborhood of , valid as :
| (6.19) | ||||
| (6.20) | ||||
| (6.21) | ||||
| (6.22) | ||||
| (6.23) |
We record two special cases in the following corollary.
Corollary 31.
In the case , and we have:
| (6.24) | ||||
| (6.25) | ||||
| (6.26) | ||||
| (6.27) | ||||
| (6.28) |
In the case , and we have:
| (6.29) | ||||
| (6.30) | ||||
| (6.31) | ||||
| (6.32) | ||||
| (6.33) |
7 The STV-PDE
In this section we derive a new form of the Einstein field equations for spherically symmetric spacetimes in SSCNG coordinates , that is, coordinates in which the metric takes the form (1.1). We do this by re-expressing the Einstein field equations in terms of self-similar variables , where . We call the resulting equations the STV-PDE.191919These were introduced by Smoller, Temple and Vogler in [29]. Since from here on we only work with solutions in SSCNG, for ease of notation, and for the rest of the paper, we drop the bars from the SSC, the notation employed in Sections 5 to 7. There should be no confusion when we refer back to Sections 5 to 7 in which refers to Friedmann comoving coordinates and where bars appear on the SSCNG coordinates (to distinguish them from comoving coordinates).
We start with the equations for spherically symmetric solutions of the Einstein field equations in SSC, now denoted , derived in [12], and look to express them in terms of as the independent variables. Note that this is not the same as writing the Einstein field equations in -coordinates. We then study the subset of solutions of these equations which meet the further condition that solutions be smooth at the center ().
In the unbarred notation, a time dependent metric taking the SSC form is given by
where
is the usual line element on the unit sphere, see [34]. Then according to [12], three of the four Einstein field equations determined by are first order and one is second order. The first order equations are equivalent to:202020Metric entries are related to in [12] by , .
| (7.1) | ||||
| (7.2) | ||||
| (7.3) |
and the the two conservation laws, , are equivalent to:
| (7.4) | ||||
| (7.5) |
where is the Minkowski stress tensor defined by (see [12]):
Equations (7.4)–(7.5) are redundant because follows from by the Bianchi identities. Moreover, to close the equations we must impose an equation of state [12]. In [12] it is shown that the Einstein field equations for metrics in SSC are (weakly) equivalent to (7.1), (7.3), (7.4) and (7.5), and equation (7.2) is derivable from these.
In this paper we assume the equation of state
| (7.6) |
with constant . With this equation of state, the Minkowski stress tensors become:
| (7.7) | ||||
| (7.8) | ||||
| (7.9) | ||||
| (7.10) |
which imply:
| (7.11) | ||||
| (7.12) | ||||
| (7.13) |
Finally, define the self-similar variable
the metric variable
| (7.14) |
and the rescaled density and velocity variables:
| (7.15) | ||||
| (7.16) |
respectively. By (7.7) and (7.8), we have
| (7.17) |
where
so when , the case we restrict to below. Assuming the mapping is regular, the following theorem gives four equations in independent variables which are equivalent212121By equivalent, we mean equivalent for smooth solutions under regular transformations of the independent and dependent variables, and where constraints are satisfied subject to appropriate initial boundary data, see [12]. to (7.1), (7.3), (7.4) and (7.5).
Theorem 32.
We call system (7.18)–(7.21) the self-similar Einstein field equations. Note again that (7.18)–(7.21) are not the Einstein field equations in coordinates, but rather the Einstein field equations in SSC , expressed in terms of variables . That is, , and are the metric components and invariant velocity in SSC coordinates, not coordinates.
The case of Theorem 32, which is the basis for this paper, is stated in the following Corollary.
Corollary 33.
The next theorem justifies our proposal that the ambient Euclidean coordinate system associated with our spherical SSC system provides the coordinate system that imposes the correct smoothness condition for SSC solutions in a neighborhood of .
Theorem 34.
Assume , , and are a given smooth solution of the equations (7.24)–(7.27) satisfying:
| (7.30) |
and assume that at the solution agrees with initial data:
such that each initial data function , , and satisfies the condition that all odd derivatives vanish at . Then all odd derivatives of , , and vanish for all .
8 The STV-ODE
To describe the evolution of solutions of equations (7.24)–(7.27) near in SSCNG, we assume the following asymptotic ansatz:
| (8.1) | ||||
| (8.2) | ||||
| (8.3) | ||||
| (8.4) |
Note that starting the expansion of and at unity forces at , so this imposes the normalized gauge condition. Note also that we have included only even powers of , which is equivalent to the assumption that the solution is smooth at , see [29]. As a special case, we have from Section 6 the following expansion of the , Friedmann solution:
| (8.5) | ||||
| (8.6) | ||||
| (8.7) | ||||
| (8.8) |
with
| (8.9) |
and:
| (8.10) | ||||
| (8.11) | ||||
| (8.12) |
The time independence of the coefficients of powers of in (8.5)–(8.8) reflects the fact that the , Friedmann spacetime is self-similar in SSCNG coordinates [30]. To see that the equations for the ansatz (8.1)–(8.4) close at every even power of , and to obtain the equations, we substitute (8.1)–(8.4) into equations (7.24)–(7.27) and collect like powers of . The result up to order in and order in (which is in velocity ) is stated in the following theorem.
Theorem 35.
Note that relations (8.10) and (8.12) between metric components and fluid variables at each order in the expansion of the Friedmann solution anticipates (8.17), which holds at each order in the expansion of general smooth solutions in powers of in SSCNG coordinates. This simplifies the ODE for the corrections significantly, as it reduces the number of unknowns from seven, to the four unknowns .
9 The Phase Portrait for The STV-ODE
Recall that letting gives222222We use a dot to denote and a prime to denote .
and this turns the ODE (8.13)–(8.16) into an autonomous system in . Letting
system (8.13)–(8.16) takes the form
where
| (9.9) |
Since (9.9) is autonomous, it can be described by a phase portrait, and the phase portrait is essentially determined by the structure of its rest points. Writing the ODE in the order and solving for gives the rest points:
| (9.10) |
Note that the first two equations in (9.9) close in variables to form the system
| (9.17) |
and the rest points of (9.17) are the restriction of the rest points , and of the system to the first two components. Regarding the rest point , we know from Section 6 that the , Friedmann metric (the Standard Model) is self-similar in SSCNG, so we know ahead of time that its expansion in powers of in (8.5)–(8.8) implies must determine a rest point of system (9.9), with this rest point being . Thus is the solution of (9.9) corresponding to the first two terms in the expansion of the Standard Model in even powers of , with the evolution of perturbations of described by nearby solutions of (9.9). As for the rest point , we observe that and () solves the self-similar Einstein field equations (7.24)–(7.27) exactly with , so a rest point satisfying with all other coefficients being null must also be a rest point at every level of expansion of solutions of the self-similar Einstein field equations in even powers of . We will see at the level of (9.17) and (9.9) that is an unstable saddle rest point and is a stable rest point, although is also a stable rest point for all higher levels of approximation too. Moreover, the underdense side of the unstable manifold of contains trajectories which connect to , one of which, together with its time translations , corresponds to the one parameter family of Friedmann spacetimes. In Theorem 44, we prove that all trajectories that tend to in the -plane also tend to at every order of expansion of smooth solutions of (7.24)–(7.27). In the next section we begin the description of the phase portrait of the system (9.17). This will play a basic role in the description of the phase portrait for (9.9), which will be discussed in the section after. Without confusion, we use , and to label the three rest points in the , and general phase portraits.
9.1 Phase Portrait for the System
In this section our notation is to use , and
Now equations (8.13)–(8.16) close at each even order of , so to begin, we describe the phase portrait for the two equations (8.13) and (8.14) in , given by (9.17). Solutions of autonomous ODE are characterized by their phase portrait. For this, observe first that
gives the contour as or , and
gives the contour as . Thus in the -plane, the contours intersect in the three rest points of the system:
Here are the first two components of , so for notational convenience (and to be consistent with [29]), we denote by the rest point corresponding to in both the and systems (9.17) and (9.9) respectively. We now show that (for Standard Model) is an unstable saddle rest point, (for Minkowski) is a stable rest point and is a fully unstable rest point.
The Jacobian, , of is given by
At the rest point , the Jacobian is
and the eigenpairs are given by:
At the rest point , the Jacobian is
The rest point has the double eigenvalue , which has a resonant Jordan normal form with a one-dimensional eigenspace:
Finally, at the rest point , the Jacobian is
and the eigenpairs are given by:
The phase portrait for system (9.17) is depicted in Figure 1. The main feature is that the rest point , which corresponds to the Standard Model , Friedmann spacetime, is an unstable saddle rest point. Note first that is a solution trajectory of (9.17), so is an invariant region, since solution trajectories never cross in autonomous systems. Thus the solutions in the stable manifold of consist of all trajectories to the left of the two trajectories in the stable manifold of in the -plane, and to the right of . These include all smooth radial underdense perturbations of , and all of these solutions enter asymptotically from below, along the eigendirection , that is, parallel to the -axis. The unstable manifold of thus has two components: The trajectories that connect the rest point to the stable rest point on the underdense (smaller ) side of , and the trajectories on the overdense (larger ) side of , which continue to larger values of until they hit . We show in the next section that these two components of the unstable manifold of correspond to the , Friedmann spacetimes to leading order in . To complete the picture, the stable manifold of on the underdense side is a single trajectory connecting the rest point to , and the stable manifold of on the overdense side is a trajectory which goes off to infinity.
9.2 The Unstable Manifold of is Friedmann
The Friedmann family of solutions is parameterized by , and each one solves the STV-PDE exactly. It follows that the leading order term in the expansion of the Friedmann solutions, that is, the projection of this family of solutions onto the -plane, will produce a family of exact solutions of system (9.17), also parameterized by . The next theorem gives an implicit expression for these solutions. From this expression we find that each Friedmann solution moves from the rest point to the rest point as ranges from to . It follows that this solution provides an exact expression for the portion of the unstable manifold of consisting of the trajectory which connects to , and the parameter represents time translation with . In this way the Friedmann family provides an exact formula for the portion of the unstable manifold of given by the trajectory which connects to in the phase portrait of the system (9.17).
Theorem 36.
The expansion of the Friedmann solution (with parameter ) in even powers of produces the following implicit formulas for and in terms of :
| (9.18) | ||||
| (9.19) |
where is defined as a function of through the relation
| (9.20) |
Moreover, equation (9.20) inverts to define the inverse function
and in terms of defined by (10.25), the , expansion of Friedmann for general is given by:
| (9.21) | ||||
| (9.22) |
Furthermore, for every we have:
| (9.23) | ||||
| (9.24) |
Proof.
That (9.18) and (9.19) is an exact solution of system (9.17) follows directly from the fact that it agrees with the leading order expansion of an exact solution of the STV-PDE, namely, the Friedmann solution. Also, that (9.18) and (9.19) describe the connecting orbit which takes to follows from (9.23) and (9.24) by a simple calculation. Theorem 36 is a special case of Theorem 42, whose proof is given in Sections 13.6 and 13.7. ∎
In summary, the phase portrait for system (9.17) consists of three rest points: , and , and the connecting orbit between and is the projection of the Friedmann solution onto the leading order -plane, with this trajectory described exactly by (9.21) and (9.22). The region is an invariant region because solves (9.17) and solution trajectories never cross in autonomous systems. The stable manifold of consists of all trajectories to the left of the two trajectories in the stable manifold of in the -plane and to the right of . All of these solutions, including , enter asymptotically, from below, along the eigendirection parallel to the -axis. We now quantify this decay to with estimates, and prove that, under appropriate time translation, all solutions entering converge to Friedmann at a faster rate than they converge to for each fixed (but not fixed ) as .
To study decay to , let , and write system (9.17) in the equivalent form
Separating the linear and nonlinear parts, we obtain the equivalent system in matrix form
| (9.35) |
Note that the first matrix is , where is a non-degenerate rest point representing in the -plane, so this rest point has the double eigenvalue and a resonant Jordan normal form with single eigenvector . By the Hartman–Grobman theorem, solutions of nonlinear autonomous systems entering a non-degenerate rest point, look asymptotically, to within quadratic errors , like the corresponding solution of the linear system.
Linearizing around the rest point of (9.35), we obtain the linear system
| (9.42) |
The solution of the linear system (9.42), satisfying initial data:
| (9.43) |
is
| (9.44) |
Thus, assuming without loss of generality that , by the Hartman–Grobman theorem, we can initially conclude that the solution of the nonlinear system (9.35) satisfying the same initial condition (9.43), is given by:
| (9.45) | ||||
| (9.46) |
where and are uniformly bounded, that is,
| (9.47) |
for some constant depending only on and . That is, a smooth trajectory is bounded on any compact interval , so the uniformity of over all follows from the decay to as . The assumption , which is no loss of generality in light of the time translation invariance of autonomous systems of ODE, simplifies formulas by allowing us to bound constants by . To obtain a more refined estimate, we use the Hartman–Grobman theorem, which implies that a solution of the nonlinear system (9.35) satisfying the same initial condition (9.43), satisfies
This, together with (9.45) and (9.46), translates into:
| (9.48) | ||||
| (9.49) |
Thus decays to by a factor of slower than due to the resonant double eigenvalue of the rest point . The next lemma shows that the difference between two solutions, under appropriate time translation, decays faster. We use this to establish that, at leading order, solutions tending to decay to the Friedmann solutions by a factor of faster than they decay to .
Lemma 37.
That is, by (9.50), both and , so comparing (9.50) to (9.49), the two solutions converge to each other faster than they decay separately to the rest point .
We use this Lemma to prove the following theorem, which implies that, for any given leading order solution which tends to the rest point as , there always exists a value of such that it decays faster asymptotically to the Friedmann spacetime with , than it decays to the rest point . Again, since smooth solutions of (9.35) starting at are bounded on the compact interval for any , and solutions are preserved under time translation because system (9.35) is autonomous, then to keep things simple, and without loss of generality, we state the following theorem in terms of solutions defined for , assuming initial time .
Theorem 38.
Let and be any solution of the system (9.17), with initial condition , which tends to the rest point as . Then there exists a constant , depending only on the initial data and , such that:
| (9.51) | ||||
| (9.52) |
where
| (9.53) |
Moreover, there exists a Friedmann solution with leading order components and a constant , depending only on the initial data and , such that:
| (9.54) | ||||
| (9.55) |
or in terms of ,
| (9.56) | ||||
| (9.57) |
Proof.
Equations (9.51), (9.52) and (9.54) follow directly from (9.45)–(9.47). To apply Lemma 37 and obtain an improvement of factor over (9.52), note that since , it follows that takes on all values in the interval as ranges from to . Thus, with the possible change of a constant, we can assume without loss of generality that . Since , defined in (9.18), that is, the leading order Friedmann solution with , ranges from the value to the value as ranges from to , it follows that there must exist a time at which . Then setting , we have
Therefore Lemma 37 applies, and the improved rate (9.55) follows from (9.50). ∎
We have proven that the coefficients of solutions which tend to the rest point , such as the Friedmann solutions, actually converge to a Friedmann solution by a factor faster than they decay to . Thus at the level of the system, the family of spacetimes is a forward time global attractor for nearby solutions. Although these solutions which enter are stable in forward direction, all of them, including Friedmann solutions, are unstable in backward time. Thus one expects to see Friedmann solutions at late times, but we cannot assume solutions close to Friedmann at late times were also close to Friedmann solutions at early times. In the next section we show that for the system (9.9), the Friedmann solutions represent just a single parameter in a two parameter family of solutions which span the unstable manifold of at this order. This extra parameter induces third order effects in the velocity, which differentiate general perturbations of that tend to as from the Friedmann spacetimes.232323For example, the third order velocity term affects the third order correction to redshift vs luminosity, the term which differentiates the Friedmann spacetimes from the Friedmann spacetime with a cosmological constant, see [29].
9.3 Phase Portrait for the System
We now describe the phase portrait for the system (9.9). We first analyze the rest points , and given in (9.10). Again observe that the rest points in the system are the restriction of the rest points , and to the plane, and thus we label them the same. The nonlinear function on the right hand side of (9.9) is
and the Jacobian of at is
For the rest point , the Jacobian is
| (9.62) |
and the eigenpairs are given by:
| (9.71) | ||||||||||
| (9.80) |
For the rest point , the Jacobian is
| (9.85) |
and has a single repeated eigenvalue , which has the two-dimensional eigenspace:
| (9.94) |
Finally, for the rest point , the Jacobian is
| (9.99) |
and the eigenpairs are given by:
| (9.108) | ||||||||||
| (9.117) |
For future use, we record the system in one obtains by substituting the values for into the system (9.9), namely, . The result is the following non-autonomous system in
| (9.124) |
We now prove that any trajectory whose restriction to the -plane enters the stable rest point in forward time, must enter the stable rest point in the four-dimensional phase portrait as well. Since smooth solutions of (9.9) starting at with are bounded on the compact interval , and being autonomous, solutions are preserved under time translation , then to keep things simple, and without loss of generality, we state the following theorem in terms of solutions defined on the interval .
Theorem 39.
Assume is a solution of the initial value problem for the system (9.9) with initial data
In addition, assume, without loss of generality, that and that the first two components (which solve (9.17)) tend to the rest point in positive time, that is, assume
Then
| (9.125) |
and there exists a constant , depending only on the system (9.9) and initial data , such that
| (9.126) |
for all . Furthermore, there exists a and , depending only on the system (9.9) and initial data , such that the associated Friedmann solution with parameter satisfies
| (9.127) |
and
| (9.128) |
for all .
We now determine the possible backward time asymptotics of solutions whose projection in the -plane is the unstable manifold of , which takes to .
Theorem 40.
Assume is a solution of the system (9.9) such that
Then there are two cases:
-
(i)
is not in the unstable manifold of .
-
(ii)
is a trajectory in the unstable manifold of , in which case
In Case (i), the solutions tend in backward time to the stable manifold of the linear system
| (9.135) |
where , and the stable manifold of system (9.135) is the line
| (9.136) |
Moreover, solutions of (9.135) are exact solutions of the fully nonlinear system (9.9), allowing for arbitrary initial conditions .
In Case (ii), for each there exists a unique value of such that in the limit , becomes asymptotic to the linearized solution
| (9.137) |
where
| (9.146) |
It follows that all trajectories in the unstable manifold of satisfying enter in backward time along , the eigendirection of the dominant eigenvalue.
Proof.
In Case (i), since
the solution components tend asymptotically to a solution of the system obtained by substituting the constant values into (9.9). The result is the linear homogeneous constant coefficient system in , given by:
| (9.147) | ||||
| (9.148) |
which is equivalent to (9.135) upon setting and . Clearly the values and give the unique rest point of system (9.147)–(9.148). Moreover, since solve system (9.17) exactly, it follows that solutions of (9.147)–(9.148) are exact solutions of the full system (9.9). The eigenpairs of system (9.135) are
consistent with the eigenpairs (9.80). From this we conclude that the backward time asymptotics of solutions in Case (i) are given by the stable manifold of system (9.135), that is, the line (9.136). This completes the proof of Case (i).
Consider now Case (ii), the case when the solution lies in the unstable manifold of the rest point . The eigenpairs of are:
| (9.153) | ||||||
| (9.158) | ||||||
| (9.163) | ||||||
| (9.168) |
Thus the positive eigenvalues and give the unstable directions and respectively. Now solutions of a nonlinear autonomous system are characterized by the solutions of the linearized system in a neighborhood of a rest point, and the linearized solutions which span the unstable manifold of are
This establishes the backward time asymptotics in Case (ii) and thus completes the proof. ∎
Since is an unstable saddle rest point, we conclude that any perturbation of which tends to the stable rest point , tends to asymptotically along the unstable manifold of . Characterizing the unstable manifold of characterizes the perturbations of , which give rise to underdense Friedmann-like solutions. This is the topic of the next section.
10 The Unstable Manifold
Recall that the rest point of the autonomous system (9.9) corresponds to the , Friedmann spacetime in the sense that it gives the first two terms of its expansion in even powers of in SSCNG. Also recall that is represented as a rest point in system (9.9) because the Friedmann solution is self-similar in SSCNG coordinates, that is, the solution depends only on . By (9.153)–(9.168), is an unstable saddle rest point with two negative and two positive eigenvalues. The main point, then, is that the Friedmann solutions represent only one parameter in a two-parameter family of solutions which lie in the unstable manifold of rest point in the system (9.9).242424For example, in terms of an expansion of redshift vs luminosity about the center, this extra parameter plays the same role, at third order, as the extra parameter obtained by introducing a cosmological constant [29]. This issue will be addressed in detail in a forthcoming paper. By the Hartman–Grobman theorem, the unstable manifold of in the nonlinear system (9.9) is parameterized by the asymptotic limits given by the unstable manifold of the system obtained by linearizing (9.9) about , that is, by the linearized system
| (10.1) |
where
| (10.6) |
The unstable manifold of in the nonlinear system (9.9) is therefore a family of solutions of (9.9) parameterized by the two parameters of the unstable manifold (9.137) of (10.1), namely,
| (10.7) |
Assume now that , which is equivalent to assuming that the trajectory in the system (9.9) projects to the unstable manifold in the system (9.17), and let denote the (essential) subset of the unstable manifold of in the nonlinear system (9.9) with asymptotic limits at given by (10.7) when . Since , we can make the translation and to scale to . The two parameter family is then parameterized by linearized solutions of the form
depending on . Here determines the side of the unstable manifold of in the -plane, represents the time translation freedom of the autonomous system (9.9) and names the non-intersecting trajectories of the solutions in . In this section we prove that unique values determine unique trajectories on each side of the unstable manifold of which correspond to the and Friedmann spacetimes respectively, that is, they correspond to the evolution of the first two terms in the expansion of the Friedmann solutions in powers of in SSCNG coordinates.252525We prove in Section 12 that . It is likely also the case that . More precisely, the Friedmann family of solutions is the unique trajectory in corresponding to the linearized trajectory
and as a solution of the nonlinear system (9.9), the trajectory emanates from on the smaller (underdense) side of and tends to as ; the Friedmann family of solutions corresponds to the unique trajectory in corresponding to the linearized trajectory
and as a solution of the nonlinear system (9.9), the trajectory emanates from on the larger (overdense) side of and intersects at some finite positive time. Moreover, the one degree of freedom associated with time translation accounts for the gauge freedom in Friedmann spacetimes through the relation for some normalizing constant , see (5.17). The fact that the unstable manifold of is a two parameter family of solutions containing the one parameter family of Friedmann solutions determined by implies that the unstable manifold of allows for one extra degree of freedom than that accounted for by the Friedmann family, and by this, perturbations of produce Friedmann-like solutions which admit one more degree of freedom than Friedmann in the redshift vs luminosity relation. Our results are summarized in the following theorem and the remainder of the section is devoted to the proof of this theorem.
Theorem 41.
Let denote the subset of the unstable manifold of the rest point in the system (9.9) which consists of trajectories which project to the unstable manifold of in the nonlinear system (9.17). Then is characterized by its backward time asymptotics given by the two parameter family of solutions of the linearized system (10.1),
| (10.8) |
parameterized by , where:
| (10.17) |
Moreover, the two sides of the unstable manifold of in the -plane correspond to the decomposition where corresponds to the linearized trajectories
and corresponds to the linearized trajectories
Furthermore, trajectories in leave the rest point in the (underdense) direction of negative , trajectories in leave the rest point in the (overdense) direction of positive and all trajectories in tend to rest point as .
That the structure of the nonlinear manifold is characterized by the linearized system (10.1) follows directly from the Hartman–Grobman theorem in light of the hyperbolic nature of rest point in (9.153)–(9.168). Moreover, the asymptotic limit for solutions in follows directly from Theorem 39 in light of the fact that when , the projection of solutions in lie on the unstable manifold of in the system (9.17), and this is the starting assumption of Theorem 39. The proof of Theorem 41 is thus a direct consequence of the following theorem which gives exact formulas for the expansion of the , Friedmann solutions in even powers of in SSCNG coordinates.
Theorem 42.
The Taylor expansion of the , Friedmann solution in even powers of , with coefficient functions of , in SSCNG coordinates takes the form:
| (10.18) | ||||
| (10.19) | ||||
| (10.20) |
In the case , , are given in terms of by the formulas:
| (10.21) | ||||
| (10.22) | ||||
| (10.23) | ||||
| (10.24) | ||||
where is defined as a function of through the relation
| (10.25) |
Equation (10.25) inverts to define the inverse function
and in terms of defined by (10.25), the expansion of , Friedmann for general is given by:
| (10.26) | ||||
| (10.27) | ||||
| (10.28) |
In the case , , are given in terms of by the formulas:
| (10.29) | ||||
| (10.30) | ||||
| (10.31) | ||||
| (10.32) |
where is defined as a function of through the relation
| (10.33) |
Equation (10.33) inverts to define the inverse function,
and in terms defined by (10.33), the expansion of , Friedmann for general is again given by (10.26)–(10.28).
Note that although the formulas for Friedmann spacetimes were given in terms of as a function of Friedmann time, in formulas (10.18)–(10.33) is now SSCNG time, not Friedmann time, as explained in the proof below. Note also that since is the only free parameter in the Friedmann spacetimes, it follows from (10.26)–(10.28) that the solutions of (9.9) determined by , Friedmann solutions of the Einstein field equations are given, for general values of the free parameter , by
| (10.34) |
where
with the right hand side being defined separately by (10.21)–(10.24) and (10.21)–(10.24) in the cases and respectively. Equation (10.34) shows that the Friedmann solutions for are time-translations of the solutions corresponding to , and hence the projection of Friedmann solutions onto solutions of (9.9) all lie on the same trajectory with giving the time translation.
The cases and of Theorem 42 are proven separately in subsections 13.6 and 13.7 respectively. For the proof of Theorem 41, we require the following corollary.
Corollary 43.
Proof.
The limits (10.35)–(10.37) can be confirmed numerically, but for completeness, we give a proof in the case based on elementary asymptotics. The argument for is of secondary interest to this paper and incorporated into the proof of Theorem 42 below. We first confirm the limits for , which by (10.25) is equivalent to . For this it suffices to use the leading order expressions:
as . This then gives:
as . Putting the leading order terms for into (10.21) and using gives
verifying the first limit in (10.35). Similarly, putting the leading order terms above into (10.23) for gives
verifying the third limit in (10.35). Again, putting the leading order terms above into (10.22) for gives
verifying the second limit in (10.35). Finally, putting the leading order terms above into (10.24) for gives
verifying the last limit in (10.35).
We now confirm the limits for , which by (10.25) is equivalent to . For this it suffices to use the leading order expressions:
as . This then gives the leading orders of and as for . Putting these leading order expressions into (10.21)–(10.24) easily confirms the limits on the right hand side of (10.36). ∎
Proof of Theorem 41.
We begin by recalling Theorem 42. The fact that Friedmann spacetimes are spherically symmetric solutions of the Einstein field equations which are smooth at the center for every implies that they all solve the self-similar equations (7.24)–(7.27) in SSCNG coordinates. This justifies the expansions (10.18)–(10.20) in even powers of , with coefficient functions of , and implies that the first and second terms in their expansion, given by (10.21)–(10.24) in the case , , and by (10.29)–(10.32) in the case , respectively, produce unique exact solutions of the system (9.9). Equation (10.34) shows that the Friedmann solution for is a time-translation of the Friedman solution corresponding to , and hence all of the Friedmann solutions lie on a single trajectory, with the same for Friedmann solutions but on a different trajectory. Therefore, since , to prove that these Friedmann solutions of (9.9) lie in the unstable manifold of , it suffices to prove that for defined in (10.21)–(10.24) and (10.29)–(10.32) respectively. Given that this follows from Corollary 43, the proof of Theorem 41 is complete. ∎
11 The Higher Order STV-ODE
Consider now the case of the STV-ODE at orders . In this light, assume a smooth solution of the STV-PDE (7.24)–(7.27) is expanded asymptotically in even powers of as so:
We introduce the notation
for , so in terms of our earlier notation,
In the next theorem we establish that the system of ODE, obtained by substituting the above expansions into equations (7.24)–(7.27) and collecting like powers of , closes in at each order . We then prove by induction that if
for in the closed system of ODE, then also in the system as well, where is the stable rest point in each closed system given by
We note that at we have and for all .
Theorem 44.
Assume a smooth solution of system (7.24)–(7.27) is expanded asymptotically in even powers of as so:
| (11.1) | ||||
| (11.2) | ||||
| (11.3) | ||||
| (11.4) |
where
Then substituting (11.1)–(11.4) into (7.26)–(7.27) and collecting even powers of leads to the following system of equations:
| (11.5) | ||||
| (11.6) |
where and are defined by
| (11.7) |
and
| (11.8) |
respectively. Note that (11.5) holds for , (11.6) holds for and the case for is given in system (9.17). Moreover, substituting (11.1) and (11.3) into (7.24) and collecting like powers of determines in terms of according to
| (11.9) |
for . Furthermore, substituting (11.1)–(11.4) into (7.25) and collecting like powers of determines , as a function of and as so
| (11.10) |
for , where is a smooth function of . Finally, substituting expressions (11.9) and (11.10) into equations (11.5)–(11.6) results in a system of ODE in which closes for every . For each , the equation for takes the form
| (11.11) |
where is the matrix
| (11.14) |
and:
Since system (11.11) closes in for every , it follows for each that equations (11.5)–(11.6) together with (11.9 and (11.10) determine a closed system of ODE in and as a function of . We write this as an system in the compact form
| (11.21) |
in unknowns , where for each , is a function of only and is a function of . We refer to system (11.21) as the -order STV-ODE. Note that at order we recover the system (9.17) in and at order we recover the system (9.9) in . As a consequence of the following generalization of Theorem 38, we establish the instability of the , Friedmann spacetime, the stability of the rest point and the stability of the , Friedmann spacetimes to perturbations of all orders. Now smooth solutions of (11.21) starting at are bounded on the compact interval for any , and since (11.21) is autonomous, solutions are preserved under the time translation . To keep things simple, and without loss of generality, we state the following theorem in terms of solutions defined for , assuming initial time .
Theorem 45.
Let be a smooth solution of the initial value problem for the system of ODE (11.21) starting from initial data
| (11.22) |
Since system (11.21) is autonomous, assume for convenience, and without loss of generality, that . Assume further that is defined for all and
| (11.23) |
Then is defined for all and
| (11.24) |
for , that is,
| (11.25) |
Moreover, there exists a constant , depending only on the system (11.21) and initial data , such that
| (11.26) |
for all . Furthermore, there exists a and constant such that the associated Friedmann solution
satisfies
| (11.27) |
and
| (11.28) |
for and .
We have the following rather remarkable corollary, which states that any solution of the system (9.17) within the domain of attraction of can be extended arbitrarily to a global solution of (11.21) at every order , with arbitrary higher order initial data. Moreover, all components higher order than decay to zero at the rate . This is a restatement of Theorem 16 in the introduction.
Corollary 46.
Assume is a solution of the system (9.17) with initial data
| (11.29) |
such that
Then the solution of the system with initial data (11.29) augmented with the arbitrary higher order initial data
| (11.30) |
exists for all time. Moreover, there exists a constant , depending only on the initial data and the equations, such that all higher order components satisfy
| (11.31) |
Proof.
Proof of Theorem 45.
We prove this by induction. To begin, we know this holds in the case by Theorem 38, so we need only assume the result for cases and show that this implies case . Moreover, since the Friedmann solutions solve system (11.21), estimates (11.27) and (11.28) for general follow from the case once we establish (11.25) for . Thus it remains only to prove (9.126) for general .
In this light, let be a solution of (11.21) satisfying initial data (11.22), assume (11.23) and assume for induction that (11.24) and (9.126) hold for . Assuming this, the proof by induction is complete once we prove (11.24) and (9.126) hold for . For this, define . Since system (11.21) closes in for every , it follows that solves the version of system (11.21) for every . Thus by the inductive assumption, (11.24) and (9.126) hold for , that is, and
holds for every for some constants with , that is, depending only on the equations and the initial data . Thus to prove the theorem, it suffices to prove there exists a constant , depending only on and , such that
So for induction, assume without loss of generality, that
| (11.32) | ||||
| (11.33) | ||||
| (11.34) |
where
| (11.35) |
for all . Putting (11.32) into system (11.21) and assuming (11.35), we find that the equation for in system (11.21) takes the form
| (11.44) |
with
and where and are treated as unknowns. Moreover, and are matrices determined by and assumed without loss of generality to satisfy the induction hypothesis in the form
| (11.45) |
We obtain estimate (9.126) from the theory of scalar first-order linear equations. For this we need a preliminary supnorm estimate on to derive an estimate for , independent of , from the first equation in (11.44) and an estimate for , independent of , from the second equation in (11.44). For this, (11.44) implies the two estimates:
| (11.46) | ||||
| (11.47) |
Adding positive terms to the right hand sides of (11.46) and (11.47) and then adding the equations gives
which in light of (11.45) yields the linear Grönwall estimate
| (11.48) |
where:
Multiplying (11.48) through by the integrating factor , we obtain
which integrates to
| (11.49) |
Now recall that
integrates by parts to
thus
Using this in (11.49) gives the estimate
| (11.50) |
where depends only on and the initial data.
Using the estimate (11.50) for in (11.46) gives
which by the integrating factor method yields
and integrates to
where and
Alternatively, using (11.50) to estimate in the -equation (11.47) gives
which integrates as above to
where again and
Now by setting
we conclude
from which estimate (9.126) follows. This completes the induction step and thereby completes the proof. ∎
Corollary 47.
Extracting the leading order terms from the right hand side of (11.5), we obtain the equivalent form (also see (13.130) below)
| (11.51) |
where
From (11.51) we compute the equations for :
| (11.52) | ||||
| (11.53) | ||||
| (11.54) |
Similarly, extracting the leading order terms from the right hand side of (11.6), we obtain the equivalent form
| (11.55) |
Again, from (11.55) we compute the equations for :
| (11.56) | ||||
| (11.57) | ||||
| (11.58) |
Moreover,
| (11.59) |
and:
| (11.60) | ||||
| (11.61) | ||||
| (11.62) |
Proof.
Equations (11.59)–(11.62), recorded in (2.32)–(2.35) of the introduction, express the ’s and ’s in terms of ’s and ’s. Using these to eliminate the ’s and ’s from equations (11.52)–(11.54) and (11.56)–(11.58) leads, after simplification, to equations (2.26)–(2.31) of the introduction. This, together with (11.59)–(11.62), then establishes Theorem 12, our final result given in the introduction.
12 Pure Eigenvalue Solutions
Recall from Section 1.5 and (1.19) that the eigenvalues of our expansion in about take the form:
Each eigenvalue introduces a free parameter into the expansion, so there are two additional free parameters at each order. At orders and we know the negative eigenvalues do not appear in the expansion of a Friedmann solution, since this would mean the trajectory does not originate at the fixed point . Furthermore, we know from Section 9 that the Friedmann solutions at leading order () have a one-to-one correspondence with trajectories emanating from the unstable manifold of on the underdense side. Thus the free parameter associated with the first positive eigenvalue, , is related to the single Friedmann free parameter . This free parameter will appear at higher orders in the expansion as well, the question is whether the higher order coefficients of the expansion of the Friedmann solution are generated purely by , or whether the parameters that appear at higher orders introduce additional contributions of . Put another way, we know that the Friedmann solution has a single parameter freedom, but we do not know if the additional parameters that enter generically in the expansion are absent, making the Friedmann solution a pure eigenvector solution, or whether these additional parameters are functions of , implying the Friedmann solution is not generated by the single leading order parameter. We conjecture that it is the former that is true, with the following theorem confirming this up to order .
Theorem 48.
Let represent SSCNG coordinates, with . Then smooth perturbations of take the form:
| (12.1) | ||||
| (12.2) | ||||
| (12.3) | ||||
| (12.4) |
where:
and:
| (12.5) |
| (12.6) |
| (12.7) |
| (12.8) |
| (12.9) |
| (12.10) |
where , , and are constants. In particular, the Friedmann spacetime satisfies and , with
that is, the Friedmann spacetime is a pure eigenvalue solution up to order .
Proof.
Substituting series (12.1)–(12.4) into the STV PDE (7.24)–(7.27), we immediately obtain the algebraic relations for , , , , and . The remaining equations are then given by:
We know from Theorem 41 that the leading order terms of and in the limit are proportional to
where is the positive eigenvalue of the system and . We have already seen that the negative eigenvalue is eliminated by setting time since the Big Bang and thus does not feature in the leading order analysis. For , if we denote , then the leading order behavior as becomes
where . We note that is the only negative eigenvalue for since in general:
If we denote , then the leading order behavior as is given in general by
where , , , , and are free parameters. With this knowledge, we can compute the Taylor series of , , , , and to yield (12.5)–(12.10). What remains is to show that the Friedmann spacetime parameters satisfy and , where
Recall from Theorem 24 that:
| (12.11) | ||||
| (12.12) | ||||
| (12.13) |
where:
| (12.14) | ||||
| (12.15) |
and:
| (12.16) | ||||
| (12.17) |
Note that is the inverse of (12.14), whereas is the inverse of the same expression but with replaced with . Now with a nontrivial amount of algebra we can write (12.11)–(12.13) as:
| (12.18) | ||||
| (12.19) | ||||
| (12.20) |
along with
| (12.21) |
The strategy is to write , , and as a series of the form (12.1)–(12.4). From this, the series of and can be deduced and compared to the general series (12.5)–(12.10). The first step is thus to write variables , , and as a series in , which requires expanding as a series in . We can compute this using relation (12.16) to yield
With this series, we can expand (12.18)–(12.21) to take the form given by (12.1)–(12.4), recalling that . Computing these series we obtain:
| (12.22) | ||||
| (12.23) | ||||
| (12.24) | ||||
| (12.25) | ||||
| (12.26) | ||||
| (12.27) |
Now noting that
we can thus expand (12.22)–(12.27) as a series in to obtain:
Finally, we see that by identifying
13 Appendix: Proofs of the Main Theorems
13.1 Proof of Theorem 22: Transformation to SSCNG
First note that by direct differentiation:
| (13.1) | ||||
| (13.2) |
Letting and , the inverse Jacobian is given by
| (13.5) |
so
| (13.8) |
where
Thus
| (13.15) | ||||
| (13.20) | ||||
| (13.23) |
We first verify that the middle term in (13.23) vanishes when , with and given in (5.33). To see this we derive (5.33) from the condition
which gives
for some positive constant . Integrating then gives:
in agreement with (5.33).
To establish (5.35) and (5.36), let and , then straightforward substitutions give:
| (13.24) | ||||
| (13.25) |
This implies
verifying (5.36). To obtain the expression for for the Friedmann metrics in SSCNG, note that, assuming (5.31), equation (13.23) gives the formula
with
so
| (13.26) |
Putting (13.1) and (13.2) into (13.26) gives
which takes the final form
| (13.27) |
It remains to establish (5.38). Since the four-velocity equals and the fluid velocity vanishes in comoving coordinates , the formula for in (13.5) gives
which verifies (5.37). Putting this together with (13.1) into the formula for gives
| (13.28) |
where
To verify (5.38), note that the mapping from involves only a change in time. Thus, using the notation , we have , and (13.28), so plugging this into the formula , the two factors of cancel and we see that .
13.2 Proof of Theorem 30: The Friedmann Spacetime in SSCNG Coordinates
Using the version of (5.31)–(5.34) of Theorem 22, let denote the cosmological scale factor and define the coordinate transformation:
| (13.29) |
where:
| (13.30) | ||||
| (13.31) | ||||
| (13.32) |
and we use the notation
By Theorem 22, (13.29) transforms metric (5.1) over to SSC form (5.29), the normalized gauge condition holds and:
| (13.33) | ||||
| (13.34) |
We now use formulas (6.6)–(6.8) for , and of Theorem 29, together with the comoving velocity condition, applicable to the , Friedmann metric in comoving coordinates . Starting with (6.6),
where
Differentiating yields
and substituting this into (13.30) and integrating gives
From this we obtain
and
Thus by simple algebra,
This confirms that the transformation (6.10) is equivalent to (13.29).
Consider now the formula (13.33). Equation (6.7) gives the Friedmann formula for the Hubble constant
Substituting this into (13.33) and simplifying confirms (6.13). To confirm (13.34), we calculate
which simplifies to
Using the above formulas in (13.34) then gives
confirming (6.14).
It remains to verify expansions (6.18)–(6.23). Now equations (6.10) and (6.11) determine in terms of as
Using this together with
we have
with:
Squaring and substituting gives
| (13.35) |
Using the elementary facts:
and
it is straightforward to invert the series (13.35) in a neighborhood of to obtain
| (13.36) |
This verifies (6.18). Using (13.36) in (6.13)–(6.16) gives (6.19)–(6.22) and:
Thus we can compute
as claimed in (6.23). This completes the proof of Theorem 30.∎
13.3 Proof of Theorem 32: Derivation of the STV-PDE
By [12], it suffices to show that (7.18)–(7.21) are equivalent to (7.1), (7.3), (7.4) and (7.5). Neglecting bars, we first convert (7.1) and (7.3) to a system in to obtain (7.18) and (7.19) respectively. Since we have:
| (13.37) | ||||
| (13.38) |
where denotes the partial of with respect to holding fixed and denotes the partial of with respect to holding fixed. Making these substitutions into (7.1) and (7.3) gives the equivalent equations:
respectively. To obtain the implied equation for , write
so
and
| (13.39) |
Putting (7.9) into (13.39) gives (7.18). Reversing these steps verifies the equivalence of (7.18) and (7.19) with (7.18) and (7.23) and (7.1) and (7.3).
It remains now only to prove that (7.20) and (7.21) are equivalent to (7.4) and (7.5) respectively, assuming (7.18) and (7.19). To start, assume and multiply equations (7.4) and (7.5) through by to get:
| (13.40) | ||||
| (13.41) |
with
Combining terms, (13.40) becomes
| (13.42) |
To achieve a similar simplification in (13.41), add and subtract to get
so the second and third terms combine to give
or equivalently
| (13.43) |
Then by (7.15) and (7.16), together with (7.7)–(7.10), we have:
and
Moreover,
Using these in (13.42) and (13.43) yields the equivalent system:
| (13.44) | ||||
| (13.45) |
We take (13.44) as our final form for the equation in terms of , but for (13.45), we use (13.44) to write the first term as
and the second term in (13.45) as
so that they combine to form
Substituting this into (13.45) yields
We conclude that in the case (7.6), equations (13.44) and (13.45) are equivalent to:
We now convert (13.44) and (13.45) to a system in . Substituting (13.37) and (13.38) into (13.44) directly gives (7.20). For (7.21), we use (13.37) and (13.38) to obtain:
| (13.46) | ||||
| (13.47) |
for . Substituting (13.46) and (13.47) into (13.45) gives
which yields
| (13.48) |
and where from (7.5) we have
Now
so putting this into (13.48) gives
| (13.49) |
Using:
we get
so
Since
we have
Thus the right hand side of equation (13.49) is
which yields (7.21).∎
13.4 Proof of Theorem 34: Smoothness at the Center is Preserved Under Evolution
We start with equations:
| (13.50) | ||||
| (13.51) | ||||
| (13.52) | ||||
| (13.53) |
First note that products and quotients of smooth functions that satisfy the condition that all odd derivatives vanish at also have this property. Now for a function , let denote the partial derivative of with respect to at . We prove this theorem by induction on . For this, assume is odd and make the induction hypothesis that for all odd , for all and all functions . We prove that for . For this, we employ the following simple observation: If the derivative of the product of functions
is expanded into a sum by the product rule, the only terms that will not have a factor containing an odd derivative of order less than are the terms in which all the derivatives fall on the same factor. This follows from the simple fact that if the sum of integers is odd, then one of them must be odd. Taking the derivative of (13.52) and setting gives the ODE at
| (13.54) |
Since all odd derivatives of order less than are assumed to vanish at , we can apply the observation and the assumptions (7.30), that , and at , to see that only the order derivative survives on the right hand side of (13.54). That is, by the induction hypothesis, (13.54) reduces to
| (13.55) |
Since under the change of variable , (13.55) is a linear first order homogeneous ODE in with , it follows by uniqueness of solutions that for all . This proves the theorem for the solution component .
Consider next equation (13.50). Differentiating both sides times with respect to and setting gives
for , thus verifying
for , which verifies the theorem for component .
Consider now equation (13.51). Differentiating both sides times with respect to , setting and applying the observation and the induction hypothesis yields
for because at , all lower order odd derivatives are assumed to vanish at and we have already verified the theorem for the component . This proves
for , verifying the theorem for component .
Consider lastly equation (13.53). Differentiating both sides times with respect to , setting and applying our observation gives
for because all lower order odd derivatives are assumed to vanish at . Thus solves the first order homogeneous ODE
starting from zero initial data at , so again we conclude
for . This verifies the theorem for the final component , thereby completing the proof of Theorem 34.∎
13.5 Proof of Theorem 35: Derivation of the STV-ODE of Order 2
We start with equations (13.52) and (13.53) in the form:
| (13.56) | ||||
| (13.57) |
Applying (8.3) to terms in (13.56) gives:
| (13.58) | ||||
| (13.59) |
and
| (13.60) |
Thus putting ansatz (8.1)–(8.4) into (13.56), using (13.58)–(13.60) and collecting like powers of shows that the equations for the corrections close at every even power of and yield the following equations for the corrections at orders and :
| (13.61) | ||||
| (13.62) |
Applying the ansatz (8.1)–(8.4) to terms in equation (13.57) gives:
| (13.63) | ||||
| (13.64) | ||||
| (13.65) | ||||
| (13.66) | ||||
| (13.67) |
Thus putting ansatz (8.1)–(8.4) into (13.57), using (13.63)–(13.67) and collecting like powers of shows that the equations for the corrections close at every even power of , and this yields the following equations for the corrections at orders zero and :
| (13.68) | ||||
| (13.69) |
Substituting now the ansatz (8.1) and (8.3) into (7.24) in the form
yields
so equating orders gives
| (13.70) |
Similarly, putting ansatz (8.1)–(8.4) into (7.25) and keeping only terms yields
so using (13.70) and equating orders gives
| (13.71) |
Finally, putting (13.70) and (13.71) into (13.61) and (13.62) and (13.68) and (13.69) yields (8.13)–(8.16). This completes the proof of Theorem 35.∎
13.6 Proof of Theorem 42: The Expansion of Friedmann in SSCNG Case
Since the derivation of (10.21)–(10.24) and (10.29)–(10.32) is based on known formulas for the Friedmann metric, for the proofs contained in this subsection and the next, we return to our earlier notation of letting unbarred coordinates denote Friedmann comoving coordinates, and barred coordinates denote SSC.
The solution of the , Friedmann equations (5.4)–(5.5) is given by (5.23)–(5.24) in Friedmann coordinates . We write these formulas in the form:
| (13.72) | ||||
| (13.73) |
where by (5.17) the Friedmann free parameter is taken to be
To transform these coordinates over to SSCNG, we begin by finding a simple expression for in (5.31), where and are given by (5.33) to be:
where is defined implicitly by (5.23) and (5.24). To obtain expressions in terms of , we calculate the following:
| (13.74) | ||||
| (13.75) | ||||
| (13.76) | ||||
| (13.77) | ||||
| (13.78) |
Note first that by (13.75), (13.72) and (13.73), we have
and using this in (13.75) gives a formula for in terms of , namely
Using this in (5.40) gives
Now let
so
and substitution yields
Using this in (5.40) gives
Taking now gives:
So since we started with (5.23) and , we have
or equivalently
Thus in summary, with , so the coordinate transformation from is:
| (13.79) | ||||
| (13.80) |
Our goal is to derive (10.21)–(10.24) by writing , and as functions of for using the Friedmann formulas and then determine the Taylor coefficients of the expansion in .
We begin by deriving formulas for and . Start with equation (5.59). We find and such that
Note that from (5.59) we have
| (13.81) |
where needs to be expressed as a function of . Since , it follows immediately from (13.81) that
| (13.82) |
Now since is a function of and to within the order we seek, we can write as a function of at by identifying
from (13.72). The result is
| (13.83) |
which follows directly from (13.72) and (13.73). This establishes (10.21).
We now find in the case . Writing
| (13.84) |
together with
we derive by Taylor expanding in , using a formula for
obtained implicitly from the transformation law (13.79)–(13.80) by writing
| (13.85) |
That is, we take (13.85) as the implicit definition for . Differentiating (13.84) with respect to holding fixed gives:
Thus
Differentiating
with respect to holding fixed yields:
Setting and using and at gives
It remains to find and as functions of at . First write (13.85) as
| (13.86) |
with
| (13.87) |
Differentiating (13.86) with respect to with fixed gives
Differentiating again, setting and using:
together with:
(noting that we are changing definitions) gives
So from the definition of in (13.87),
From this we conclude
| (13.88) |
By (13.72), since , we have
so putting this into (13.88), and using , gives
| (13.89) | ||||
| (13.90) |
Thus we have
| (13.91) |
Note that (13.91) holds for any and will be used for the case below as well. Using (13.82) and (13.89) in (13.91) gives
We summarize this as
| (13.92) |
Equation (13.92) follows from (13.82) and (13.75) because is computed at where . This establishes (10.23).
We next obtain formulas for and by expanding in even powers of . We begin with the formula (5.38) for ,
| (13.93) |
Substituting , and into (13.93) gives the exact formula
| (13.94) |
Now we know and agrees with at , so with error order , so we again write
where and, according to (13.90),
Thus
where we have written , so
and since we have to leading even orders
Continuing, we obtain
From this we obtain the following exact formulas valid at for and :
| (13.95) | ||||
| (13.96) |
Using formulas (13.72)–(13.78) together with we immediately obtain
This establishes (10.22).
To express as a function of , write (13.96) as
| (13.97) |
where
| (13.98) | ||||
| (13.99) |
and where the functions , , and each take as their only argument, since we evaluate at . Substituting (13.72), (13.73) and (13.78) into (13.98) and simplifying gives
| (13.100) |
which uses the expression
To write as a function of , substitute (13.72), (13.73), (13.78) and (13.90) into (13.99) and simplify to obtain
| (13.101) |
Putting formulas (13.100) and (13.101) for and into (13.97) establishes (10.24). This competes the proof of Theorem 42 in the case .∎
13.7 Proof of Theorem 42: The Expansion of Friedmann in SSCNG Case
We continue in this subsection with our original notation that unbarred coordinates denote Friedmann comoving coordinates and barred coordinates denote SSC. To establish (10.29)–(10.32), we begin with formulas (5.27)–(5.28) for the solutions of the Friedmann equations (5.4)–(5.5), given in Friedmann coordinates , for , , written in the form:
| (13.102) | ||||
| (13.103) |
where again is the Friedmann free parameter given by
As in the case , to transform these coordinates over to SSCNG, we begin by finding a simple expression for , where and are given in (5.33) for case by:
| (13.104) | ||||
| (13.105) |
To obtain expressions in terms of , we calculate the following:
| (13.106) | ||||
| (13.107) | ||||
| (13.108) | ||||
| (13.109) |
and
| (13.110) |
Note first that by (13.103) and (13.102) we have
and using this in (13.102) gives a formula for in terms of , namely
Using this in (13.104), we obtain
Making the substitution:
gives, noting (13.106),
Using this in (13.104) then gives
Now taking we obtain:
| (13.111) | ||||
| (13.112) | ||||
| (13.113) |
Thus by (13.111)–(13.113) and , we have
or
| (13.114) |
Thus in summary, with , so the coordinate transformation from with normalized gauge is:
| (13.115) | ||||
| (13.116) |
Note that the coordinate transformation (13.115) becomes singular at , the point where the Friedmann spacetime expands to its maximum. Thus for , the transformation (13.115)–(13.116) describes the Friedmann spacetime in SSC from the Big Bang , out to the maximum , . Our goal is to write , and as functions of for for the Friedmann solution and confirm that the Taylor coefficients of the expansion in are given by (10.29)–(10.32).
To derive and such that
we start with equation (5.59). Note that from (5.59) we have
| (13.117) |
where again, needs to be expressed as a function of . Since , it follows immediately from (13.117) that
Now since is a function of and to within the order we seek, we can write as a function of at by identifying
from (13.102). The result is
| (13.118) |
which follows directly from (13.102) and (13.103). From (13.118) we obtain the limits:
Equations (10.29) and the second limit in (10.37) follow from the identity , see (13.70). We next find . For this, we start with (13.95), given by
Substituting the formulas (13.102), (13.103) and (13.107) into the right hand side gives
| (13.119) |
From (13.119) we obtain the limits:
This establishes the second limits in (10.35) and (10.37). To express and as functions of for the case , we need a formula for . For this, we start with (13.115) in the form
with
| (13.120) |
By (13.120),
Differentiating (13.114) twice with respect to , setting and using at gives
so by (13.102), (13.103), (13.120) and (13.106) we have
| (13.121) |
Consider now in the case . We start with (13.91). Using (13.102), (13.103), (13.120) and (13.107) in (13.91) gives
| (13.122) |
From (13.122) we obtain the limits:
Since , this establishes the third limits in (10.35) and (10.37).
Finally, consider in the case . We start with (13.91). Using (13.102), (13.103), (13.120) and (13.107) in (13.91) gives
| (13.123) |
where:
| (13.124) | ||||
| (13.125) |
Substituting (13.102), (13.103) and (13.107) into (13.124) gives
| (13.126) |
and substituting (13.102), (13.110) and (13.121) into (13.125) gives
| (13.127) |
From (13.126) we obtain the limits:
and from (13.122) we obtain the limits:
Finally, putting (13.126) and (13.127) into (13.123) gives the formula
| (13.128) |
From (13.128) we obtain the limits
This establishes (10.32), as well as (10.35) and (10.37), and thus completes the proof of Theorem 42 and Corollary 43 in the case , thereby completing the proof of Theorem 41.∎
13.8 Proof of Theorem 44: Derivation of the STV-ODE of Order
To show (11.5), we start with equation (7.26) in the form
and expand the terms separately. We first note that
and
Thus
and
| (13.129) |
Using this in (7.26) gives (11.5). Extracting the leading order term first in equation (13.129) we obtain
| (13.130) |
and so this confirms the first row of the matrix (11.14).
To show (11.6), we write equation (7.27) in the form
| (13.131) |
and again expand the terms separately. To expand the first term on the right hand side of (13.131), we write
where, noting (11.7), we use
and, noting (11.8),
Note that the highest order term , which appears in , is .
To expand the second term on the right hand side of (13.131), we write:
so that
and in the case , we obtain
Thus
or
| (13.132) |
where we have used the fact that the leading order term in
is
The first line in (13.132) confirms (11.6) and the penultimate line displays the leading order terms, which establish the second row of the matrix in (11.14). The next to leading order terms in (13.130) and (13.132) confirm that really does give the leading terms in (11.5) and (11.6), thereby confirming that involves only lower order terms. This completes the proof of Theorem 44.
To verify (11.10), we start with the STV self-similar equation (13.51) for , which we write as
| (13.133) |
We now substitute the ansatz (11.1)–(11.4) into (13.133) and collect like powers of . First, we use:
to obtain
| (13.134) | ||||
and by (11.3),
so
and
Putting these together we have
| (13.135) |
Equating (13.134) to (13.135) and setting gives
Equating (13.134) to (13.135) for then gives
| (13.136) |
Finally, solving (13.136) for , using the fact that the leading order term comes from the last sum in the case and , we obtain, for ,
from which (11.10) follows immediately.∎
14 Appendix: Comparison with Results in [29]
We have proven that solutions of the STV-ODE which lie on the underdense side of the unstable manifold of the rest point at order all tend to the rest point as in the system as well. This means the higher order corrections for all , and hence the leading order approximation becomes the dominant part of the solution for fixed as . It follows that such perturbations of produce approximately uniform expanding spacetimes which appear more and more like Friedmann spacetimes at late times at each fixed but expand at an apparently accelerated rate during intermediate times. This case was first made in [29] using the theory up to order , but the expansions were centered on , while here we centered the expansions on . We conclude this paper by making the connection between the formulas in [29] and the formulas established in this paper.
To make the connections with [29] at order as clear as possible, in this section we adopt the notation of [29], by which denote SSCNG coordinates, and calculations are based on corrections to , instead of corrections to zero. That is, as in [29], we now let denote corrections to the Friedmann solution based on solutions expanded about according to:
| (14.1) | ||||
| (14.2) | ||||
| (14.3) | ||||
| (14.4) |
So, to be clear, this is accomplished by defining in terms of as defined before in (8.7) and (8.9) and then dropping the bars. In this notation, now corresponds the rest point of the Friedmann solution, but to keep notation to a minimum, we continue to use to record the values . Since the change is a simple translation of the unknowns, relations (8.17), that is:
continue to hold with , , and defined in (14.1)–(14.4), and the new system in has the same rest points , and as (9.9) up to translation by , and rest points have the same Jacobians and eigenpairs as system (9.9). The only change from (9.9) is the constants which appear in the equations, which we now record to achieve correspondence with the equations and results stated in [29].
Theorem 49.
This corresponds to equations (3.31)–(3.34) in [29], except for one correction, which we record here. Equation (3.33) in [29] is missing the term , which appears in (14.7). This error did not significantly effect further calculations in [29] because the third order term in redshift vs luminosity used only , not , and this missing term in the equation did not significantly effect the right hand side of (3.34) for the numerics performed in [29].
15 Appendix: Lemaître (1932) Tolman (1933) Bondi (1945) Spacetimes
In the papers [61*]-[65*] from Matt Visser’s paper, the references suggested by the editors at RSPA, we see that inhomogeneous cosmologies modeled by the LTB spacetimes were employed in an attempt to model the anomalous acceleration without dark energy. A main issue addressed by these papers is the existence of central weak singularities at . To quote [65*]=[22] Romano, 5th paragraph:
In this paper [we] calculate the low redshift expansion of mn(z) and DL(z) for flat CDM and matter dominated LTB. We then show how, if the conditions to avoid a central weak singularity are imposed, it is impossible to mimic dark energy with a LTB model without cosmological constant for both these observables, giving a general proof of the impossibility to give a local solution of the inversion problem for a smooth LTB model. This central singularity is rather mild, and is associated to linear terms in the energy density which lead to a divergence of the second derivative, so non smooth LTB models could still be viable cosmological models. It can be shown that the inversion problem [34] can be solved if the smoothness conditions we are imposing are relaxed. This implies that the numerical solutions of the inversion problem which have been recently proposed [11, 20] must contain such a weak central singularity.
Thus the singularity is associated to linear terms in the energy density which lead to a divergence of the second derivative. Now our solutions in SSC constructed within our asymptotic ansatz are singularity free. That is, the density and metric entries and invoke only even powers of (and hence ), so these are smooth at . Moreover, is odd in and , and since it is a derivative, this is the condition that is smooth in for at . Thus all components of our solution are smooth and it gives the quadratic correction to redshift vs luminosity in line with dark energy, so it appears to contradict the statement above by Romano who claims that all such solutions must have a weak singularity at if expressed in LTB coordinates. This begs the following questions:
(1) Can every solution in SSC be expressed in LTB? That is, could our solution not be an LTB solution? We answer this in the negative by proving below that every SSC metric can be transformed to LTB when .
(2) Could the transformation from SSC to LTB introduce a weak singularity at in LTB when no such singularity exists in SSC? We argue that there is a mechanism for this.
In regard to (2), we first prove that a function , with , extends to a smooth function , with , if an only if is smooth and all odd derivatives vanish at . Thus, for example, if the Taylor expansion of in powers of about contains an odd power term , then implies has a kink in the derivative at .
In paper [65] it is argued that solutions constructed in Lemaître–Tolman–Bondi (LTB) coordinates that can account for the anomalous acceleration near the center also exhibit a central weak singularity in the second derivative of the (scalar) density at . This appears to be inconsistent with the fact that our solutions in SSC, including the density, are smooth with no singularity at the center. We show how our work here clarifies this issue, and there is actually no inconsistency, due essentially to the fact that spherical coordinates do not form a regular coordinate system at .
To this end, recall that polar coordinates for take the radial coordinate to be , and a function given by , with , represents a smooth spherically symmetric function of precisely when is smooth and satisfies the condition that all odd derivatives of vanish at the origin . That is, a function represents a smooth spherically symmetric function of the Euclidean coordinates at if and only if the function
is smooth at . Assuming is smooth for , taking the derivative of from the left and right and setting them equal gives the smoothness condition . Thus represents a smooth function of the underlying coordinates if and only if is smooth for and all odd derivatives vanish at . Moreover, if any odd derivative , then has a jump discontinuity in its derivative, and hence a kink singularity in its derivative at . Similarly, a spherically symmetric function on a four-dimensional spacetime in spherical coordinates will represent a smooth function of the underlying Euclidean coordinates at if and only if is a smooth function at . In particular, if the Taylor expansion of about contains a nonzero odd power of order , so that , then the function has a kink singularity in its derivative at the origin in those coordinates. But since is a singular point of spherical coordinates, this may only be an apparent coordinate singularity.
To characterize the problem for LTB coordinates, consider now a coordinate transformation that takes a metric from LTB coordinates over to SSC given by
Then by definition, the fluid is comoving with respect to , constant are geodesics, is proper time along constant and is arc-length distance along radial directions at constant [13].
The following theorem characterizes when a smooth scalar density function in SSC has a kink singularity in its second derivative at when represented in LTB coordinates. The theorem is a direct consequence of the following lemma.
Lemma 50.
Assume that is a scalar density function which extends to a smooth function in SSC, so that it is given near by
| (15.1) |
where the dots indicate that the expansion includes only even powers of . Assume further that the mapping from SSC to LTB coordinates is smooth, invertible on and meets the minimal regularity conditions that all derivatives of up to order three have continuous one-sided limits at , together with
| (15.2) |
and
| (15.3) |
Finally, let
denote the representation of the function in LTB coordinates. Then among odd order derivatives, the first partial derivative of with respect to always vanishes at , but the third partial derivative of with respect to at is given by
| (15.4) |
Proof.
To verify (15.4), compute the partial derivatives of with respect to as so:
| (15.5) | ||||
| (15.6) |
Now at by (15.1) and at by (15.3), so these in (15.5) imply at as claimed. For the third derivative, use (15.3) together with the fact that by (15.1), all partial derivatives of that are odd order in vanish at . It is then straightforward to see that the only terms that survive under differentiation of (15.6) with respect to upon setting are given by the right hand side of (15.4). ∎
We conclude the condition that the third derivative (15.4) be nonzero is necessary and sufficient for a density function , smooth in SSC, to have a nonzero third order derivative with respect to in LTB at , and hence is necessary and sufficient for the second -derivative of to have a kink singularity in LTB at .
Theorem 51.
Note that since SSC is the coordinate system in which is arc-length distance along radial curves at constant , the condition of smoothness of in at is geometric smoothness, so the kink singularity in LTB should be treated as a coordinate singularity.
All of this raises an important and interesting unresolved issue with our work. Namely, our asymptotic ansatz is saying no more and no less than that the solution is smooth at . But our equations only close up when we impose our gauge condition relating metric coefficients in the expansion to fluid coefficients. So assuming we can solve for solutions within the asymptotics, we have to wonder whether there are other solutions which are smooth but for which that ansatz does not close. However, there must be, because if we take one of our solutions and change the gauge by a transformation of , it still will not change the even and odd powers in , so the solutions will stay smooth in the new gauge, but in the new gauge, it will not solve our asymptotic equations. On the other hand, it will still solve the exact equations because they are gauge invariant. The question then is, are there smooth solutions of the Einstein field equations, expressible in even powers of and , which are not gauge transformations of solutions expressible in our ansatz?
We can resolve this as follows. Every solution of the Einstein field equations (that admits a Taylor expansion at ) in SSC has to have even powers of and hence even powers of in that expansion. But it will not be in our gauge because we may have . However, a gauge transformation will transform the solution into our gauge. Now plugging into the Einstein field equations, our gauge condition and so on must hold in order for the Einstein field equations to hold. Not for the ansatz to close, but for the Einstein field equations themselves to hold on that solution. Thus, every solution that has a Taylor expansion at and is smooth there must be a gauge transformation of one of our solutions.
To conclude, every spherically symmetric solution of the Einstein field equations that is smooth at in SSC, is one of our solutions, and hence the solution space admits the phase portrait that we introduced. In particular, is an unstable solution in that space.
Finally, since computing entails integrating arc-length along the geodesic particle path , the resulting formulas would not in general close up under even powers, because applying this integration to quadratics would result in cubics and so on.
It now remains to verify (1). We start with the following theorem.
Theorem 52.
Assume that for constant are geodesics and
is diagonal with and . Then depends only on .
Proof.
The geodesic equation is
Thus for an (with constant) geodesic, we have and , so
However,
so
and hence depends only on . ∎
Now assume that we are given a general metric in SSC ,
where is arc-length at each fixed and the subscript indicates the coordinates on which we assume the components depend. Assume further that , so the particle paths are geodesics, and assume we know constant describes the particle paths, so that subluminal velocities imply is a space-like coordinate. We can thus transform to comoving coordinates by , producing
However, by Weinberg [34], there always exists a time transformation , obtained locally from an integrating factor, which eliminates the middle term , while keeping the comoving radial coordinate , that is,
We now conclude by Theorem 52 that depends only on . But now the time transformation with converts and the final coordinates are LTB coordinates. This verifies (1).
References
- [1] R. Adler, M. Bazin and M. Schiffer, Introduction to General Relativity, 2nd Edition, McGraw–Hill, (1975).
- [2] S. Alexander, T. Biswas, A. Notari and D. Vaid, Local Void vs Dark Energy: Confrontation with WMAP and Type Ia Supernovae, Journal of Cosmology and Astroparticle Physics 2009(09), (2009) 025.
- [3] M. E. Cahill and A. H. Taub, Spherically Symmetric Similarity Solutions of the Einstein Field Equations for a Perfect Fluid, Communications in Mathematical Physics 21, (1971) 1–40.
- [4] B. J. Carr and A. A. Coley, Self-Similarity in General Relativity, Classical and Quantum Gravity 16(7), (1999) R31.
- [5] T. Clifton, P. G. Ferreira and K. Land, Living in a void: Testing the Copernican Principle with Distant Supernovae, Physical Review Letters 101(13), (2008) 131302.
- [6] T. Clifton and P. G. Ferreira, Does Dark Energy Really Exist?, Scientific American 300(4), (2009) 48–55.
- [7] C. J. Copi, D. Huterer, D. J. Schwarz and G. D. Starkman, On the Large-Angle Anomalies of the Microwave Sky, Monthly Notices of the Royal Astronomical Society 367(1), (2006) 79–102.
- [8] K. Enqvist, Lemaitre–Tolman–Bondi Model and Accelerating Expansion, General Relativity and Gravitation 40, (2008) 451–466.
- [9] J. Garcia-Bellido and T. Haugbølle, Confronting Lemaitre–Tolman–Bondi Models with Observational Cosmology, Journal of Cosmology and Astroparticle Physics 2008(04), (2008) 003.
- [10] J. Glimm, Solutions in the Large for Nonlinear Hyperbolic Systems of Equations, Communications on Pure and Applied Mathematics 18(4), (1965) 697–715.
- [11] J. Glimm and P. D. Lax, Decay of Solutions of Systems of Nonlinear Hyperbolic Conservation Laws, Memoirs of the American Mathematical Society 101, (1970).
- [12] J. Groah and B. Temple, Shock-Wave Solutions of the Einstein field equations with Perfect Fluid Sources: Existence and Consistency by a Locally Inertial Glimm Scheme, Memoirs of the American Mathematical Society 172(813), (2004).
- [13] Ø. Grøn and S Hervik, Einstein’s General Theory of Relativity: With Modern Applications in Cosmology, Springer Science & Business Media, (2007).
- [14] E. W. Kolb, S. Matarrese and A. Riotto, On Cosmic Acceleration Without Dark Energy, New Journal of Physics 8(12), (2006) 322.
- [15] P. D. Lax, Hyperbolic Systems of Conservation Laws II, Communications on Pure and Applied Mathematics 10, (1957) 537–566.
- [16] M. S. Longair, Galaxies, In Galaxy Formation, 2nd Edition, 57–104, Springer Berlin, (2008).
- [17] J. A. Peacock, Cosmological Physics, Cambridge University Press, (1999).
- [18] S. Perlmutter, Supernovae, Dark Energy, and the Accelerating Universe, Physics Today 56(4), (2003) 53–60.
- [19] S. Perlmutter et al. Measurements of and from 42 High-Redshift Supernovae, The Astrophysical Journal 517(2), (1999) 565.
- [20] J. Plebanski and A. Krasinski, An Introduction to General Relativity and Cosmology, Cambridge University Press, (2006).
- [21] A. G. Riess et al. Observational Evidence from Supernovae for an Accelerating Universe and a Cosmological Constant, The Astronomical Journal 116(3), (1998) 1009.
- [22] A. E. Romano, Can the Cosmological Constant be Mimicked by Smooth Large-Scale Inhomogeneities for More Than One Observable?, Journal of Cosmology and Astroparticle Physics 2010(05), (2010) 020.
- [23] J. Smoller, Shock Waves and Reaction–Diffusion Equations, 2nd Edition, Springer Science & Business Media, (1994).
- [24] J. Smoller and B. Temple, Global Solutions of the Relativistic Euler Equations, Communications in Mathematical Physics 156(1), (1993) 67–99.
- [25] J. Smoller and B. Temple, Shock-Wave Cosmology Inside a Black Hole, Proceedings of the National Academy of Sciences 100(20), (2003) 11216–11218.
- [26] J. Smoller and B. Temple, Cosmology, Black Holes, and Shock Waves Beyond the Hubble Length, Methods and Applications of Analysis 11(1), (2004) 77–132.
- [27] J. Smoller, B. Temple and Z. Vogler, Corrections to the Standard Model of Cosmology, Communications in Information and Systems 13(4), (2013) 445–468.
- [28] J. Smoller, B. Temple and Z. Vogler, An Alternative Proposal for the Anomalous Acceleration, Surveys in Differential Geometry 20(1), (2015) 267–276.
- [29] J. Smoller, B. Temple and Z. Vogler, An Instability of the Standard Model of Cosmology Creates the Anomalous Acceleration Without Dark Energy, Proceedings of the Royal Society A 473(2207), (2017) 20160887.
- [30] B. Temple and J. Smoller, Expanding Wave Solutions of the Einstein field equations that Induce an Anomalous Acceleration into the Standard Model of Cosmology, Proceedings of the National Academy of Sciences 106(34), (2009) 14213–14218.
- [31] B. Temple and J. Smoller, General Relativistic Self-Similar Waves that Induce an Anomalous Acceleration into the Standard Model of Cosmology, Memoirs of the American Mathematical Society 218(1025), (2012).
- [32] R. A. Vanderveld, E. E. Flanagan and I. Wasserman, Mimicking Dark Energy with Lemaître-Tolman-Bondi Models: Weak Central Singularities and Critical Points, Physical Review D 74(2), (2006) 023506.
- [33] M. Visser, Conformally Friedmann–Lemaître–Robertson–Walker Cosmologies, Classical and Quantum Gravity 32(13), (2015) 135007.
- [34] S. Weinberg, Gravitation and Cosmology: Principles and Applications of the General Theory of Relativity, John Wiley & Sons, (1972).
- [35] D. L. Wiltshire, Cosmic Clocks, Cosmic Variance and Cosmic Averages, New Journal of Physics 9(10), (2007) 377.
- [36] C. Yoo, T. Kai and K. Nakao, Solving the Inverse Problem with Inhomogeneous Universes, Progress of Theoretical Physics 120(5), (2008) 937–960.