Dynamics of cold random hyperbolic graphs with link persistence
Abstract
We consider and analyze a dynamic model of random hyperbolic graphs with link persistence. In the model, both connections and disconnections can be propagated from the current to the next snapshot with probability . Otherwise, with probability , connections are reestablished according to the random hyperbolic graphs model. We show that while the persistence probability affects the averages of the contact and intercontact distributions, it does not affect the tails of these distributions, which decay as power laws with exponents that do not depend on . We also consider examples of real temporal networks, and we show that the considered model can adequately reproduce several of their dynamical properties. Our results advance our understanding of the realistic modeling of temporal networks and of the effects of link persistence on temporal network properties.
I Introduction
Random hyperbolic graphs (RHGs) have been shown to be adequate for modeling real complex networks, as they naturally and simultaneously possess many of their common structural characteristics. Such characteristics include heterogeneous degree distributions, strong clustering, and the small-world property Krioukov et al. (2009, 2010); Gugelmann et al. (2012); Boguñá et al. (2020); Fountoulakis et al. (2021). RHGs are adequate only in the “cold regime,” where the network temperature in the model takes values between and . This is because only when can RHGs have strong clustering, as observed in real systems Krioukov et al. (2010). Cold RHGs have been successfully used as a basis in maximum likelihood estimation methods that infer the hyperbolic node coordinates in real systems, facilitating important applications that include community detection, missing and future link prediction, network navigation, and network dismantling Boguñá et al. (2010); Papadopoulos et al. (2015a, b); Kleineberg et al. (2016); García-Pérez et al. (2019); Serrano et al. (2012); Lehman et al. (2016); Allard and Serrano (2020); Osat et al. (2022).
Recently, the simplest possible version of dynamic RHGs, the dynamic- model, has been proposed and analyzed Papadopoulos and Rodríguez-Flores (2019). In the dynamic-, the hyperbolic node coordinates remain fixed, while each network snapshot is constructed anew using the static model, or equivalently, the hyperbolic model Krioukov et al. (2010). It has been shown that the dynamic- can qualitatively (and some times quantitatively) reproduce many temporal network properties observed in real systems, such as the broad distributions of contact and intercontact durations and the abundance of recurrent components Papadopoulos and Rodríguez-Flores (2019); Rodríguez-Flores and Papadopoulos (2018).
Correlations among the network snapshots in the dynamic- are imposed by the nodes’ hyperbolic coordinates; nodes at smaller hyperbolic distances have higher chances of being connected in each snapshot, intuitively explaining why heterogeneous (inter)contact distributions emerge in the model. In particular, the contact and interconnect distributions are power laws in the model, with respective exponents and Papadopoulos and Rodríguez-Flores (2019). These distributions are remarkably consistent with (inter)contact distributions observed in some real systems. For instance, in human proximity networks, studies have reported power-law contact distributions with exponents larger than or close to Scherrer et al. (2008); SPc , and power-law intercontact distributions with exponents between and Hui et al. (2005); Chaintreau et al. (2007); Takaguchi et al. (2011); Fournet and Barrat (2014). Based on the dynamic-, human proximity networks have been recently mapped to hyperbolic spaces, and related applications have been explored Rodríguez-Flores and Papadopoulos (2020). We note that the dynamic- exhibits realistic dynamical properties only in the cold regime () but not in the hot () Papadopoulos and Zambirinis (2022).
In this paper, we observe that synthetic temporal networks constructed with the dynamic- may underestimate the average contact and intercontact durations in the corresponding real systems. This observation suggests that in addition to purely geometric aspects the explicit link formation process in one snapshot may impact the topology of subsequent snapshots in real networks. Motivated by this observation, we consider and analyze a generalization of the dynamic- with link persistence Mazzarisi et al. (2020); Papadopoulos and Kleineberg (2019); Hartle et al. (2021), called -dynamic-. In the -dynamic-, both connections and disconnections can persist, i.e., propagate, from the current to the next snapshot with probability . Otherwise, with probability , connections are reestablished according to the model. The case corresponds to the dynamic- Papadopoulos and Rodríguez-Flores (2019).
We perform a detailed mathematical analysis of the contact and intercontact distributions in the -dynamic-. One of our main results is that while the persistence probability affects the averages of the (inter)contact distributions, it does not affect the tails of these distributions. Specifically, we show that for sufficiently sparse networks the (inter)contact distributions decay as power laws with the same exponents as in the dynamic-. We also show that synthetic networks constructed with the -dynamic- can reproduce several dynamical properties of real systems, while better capturing their average (inter)contact durations. These results advance our understanding of realistically modeling of temporal networks and of the effects of link persistence. In particular, our results suggest that link persistence in real systems may affect only the averages but not the tails of the (inter)contact distributions, which are important properties affecting the capacity and delay of a network and the dynamics of spreading processes Conti and Giordano (2014); Vazquez et al. (2007); Smieszek (2009); Karsai et al. (2011); Machens et al. (2013); Gauvin et al. (2013). For instance, it has been shown that heterogeneous inter-event distributions may slow down epidemic spreading Vazquez et al. (2007); Karsai et al. (2011). Since link persistence does not affect the tail of the intercontact distribution, it may not affect the characteristics of related epidemic spreading measures Vazquez et al. (2007); Karsai et al. (2011).
Intuitively, a higher persistence for non-links means that nodes will tend to stay disconnected for a longer period of time, which can slow down epidemic spreading. This slow-down could be more important for intercontacts that would otherwise be short, e.g., intercontacts between more similar nodes. On the other hand, a higher persistence for links means that nodes will tend to stay connected for a longer period of time, which can increase the chances of transmitting a communicable disease. This effect could be more important for contacts that would otherwise be short, e.g., contacts between less similar nodes. Investigating the exact effects of link persistence on epidemic spreading is an interesting avenue for future work.
The rest of the paper is organized as follows. In the next section we provide an overview of the model. In Sec. III we present the -dynamic-. In Sec. IV we illustrate that the -dynamic- can reproduce several dynamical properties of real networks, while acurrately capturing their average contact durations. In Sec. V we perform a detailed mathematical analysis of the contact and intercontact distributions in the -dynamic-. Furthermore, we analyze the expected time-aggregated degree in the model. In Sec. VI we discuss other relevant work. Finally, we conclude the paper with a discussion and future work directions in Sec. VII.
II model
In the model Krioukov et al. (2010) each node has latent (or hidden) variables and . The latent variable is proportional to the node’s expected degree in the resulting network and abstracts its popularity. The latent variable is the angular similarity coordinate of the node on a circle of radius , where is the total number of nodes Papadopoulos et al. (2012). To construct a network with the model that has size , average node degree , and temperature , we perform the following steps:
-
(1)
coordinate assignment: for each node , sample its angular coordinate uniformly at random from , and its degree variable from a probability density function (PDF) ;
-
(2)
creation of edges: connect every pair of nodes with the Fermi-Dirac connection probability
(1)
In the last expression, is the effective distance between nodes and ,
| (2) |
where is the similarity distance between and . We note that since is uniformly distributed on , the PDF of is the uniform PDF on , .
Parameter in (2) is derived from the condition that the expected degree in the network is indeed . For sparse networks ()
| (3) |
where . Further, the expected degree of a node with latent variable can be computed as
| (4) |
For sparse networks, the resulting degree distribution has a similar functional form as Boguñá and Pastor-Satorras (2003). We also note that smaller values of the temperature favor connections at smaller effective distances and increase the average clustering Dorogovtsev (2010) in the network, which is maximized at .
III -dynamic-
The -dynamic- models a sequence of network snapshots, , , where is the total number of time slots. In the model there are nodes that are assigned latent variables as in the model, which remain fixed in all time slots. The temperature and the persistence probability are also fixed, while each snapshot is allowed to have a different average degree . Thus, the model parameters are , and .
Let
The snapshots in the -dynamic- are generated according to the following simple rules:
-
(1)
snapshot is a realization of the model with average degree ;
-
(2)
at each time step , snapshot starts with disconnected nodes and has target average degree ;
- (3)
-
(4)
at time , the process is repeated to generate snapshot .
Equation (5) is the case in which the node pair is connected in the previous time slot . In that case, the pair is connected in slot either because the connection has been propagated from (with probability ) or because the connection has been established according to (with probability ). Equation (6) is the case in which the pair is not connected in . In that case, the pair can be connected in slot if the disconnection has not been propagated from (with probability ) and the pair connected according to .
We note that the unconditional connection probability for node pair at time , can be written as
| (7) |
Solving the above recurrence equation yields
| (8) |
Notice that if each snapshot has the same average degree, , then is the same in all slots, , and (8) simplifies to
| (9) |
In other words, if , then the unconditional connection probability is exactly the same as the connection probability in the model. Thus, as a side note, in this case the -dynamic- satisfies the equilibrium property, in the sense that individual snapshots in the model are indistinguishable from static-model realizations Hartle et al. (2021). The equilibrium property is also satisfied for , i.e., when there is no link persistence, in which case . Otherwise, the equilibrium property is not satisfied.
IV Real vs. modeled networks
IV.1 Real networks
To illustrate the realism of the model we compare its properties against the properties of five real temporal networks. These networks according to the model have a different link-persistence probability . Specifically, we consider three face-to-face interaction networks from SocioPatterns Soc , which correspond to a high school in Marseilles Mastrandrea et al. (2015), a primary school in Lyon Stehlé et al. (2011), and a village in rural Malawi Ozella et al. (2021). These networks were captured over a period of , and days, respectively. Each of their snapshots corresponds to a slot of s.
Further, we consider the network of coded interactions between socio-political actors from the Integrated Crisis Early Warning System (ICEWS) Boschee et al. (2015), as well as the e-mail communication network between members of a European research institution (Email-EU) ema ; Paranjape et al. (2017). We consider 401 daily snapshots of the ICEWS network (days - in the data). For the Email-EU network we consider only bidirectional communications corresponding to weekly snapshots (from October 2003 to May 2005). In all cases we number the time slots and assign node IDs sequentially, and . Table 2 gives an overview of the data.
IV.2 Modeled counterparts
For each real network we construct its synthetic counterpart using the -dynamic-, following a similar procedure to that in Ref. Papadopoulos and Rodríguez-Flores (2019). Specifically, each counterpart has the same number of nodes and duration as the corresponding real network, while the latent variable of each node is assigned as follows. First, for each real network we compute the average degree per slot of each node ,
| (10) |
where is node’s degree in slot . Then, we set
| (11) |
The angular coordinate of each node is sampled uniformly at random from . Further, the target average degree in each snapshot , , is set equal to the average degree in the corresponding real snapshot at slot ,
| (12) |
Finally, the temperature and the link-persistence probability are simultaneously tuned such that the resulting average time-aggregated degree and the average contact duration are similar to the ones in the real network. We perform this tuning manually, by running simulations with different values of and until we find the combination that produces similar values for and as in the corresponding real network. Fig. 4 in Sec. V.1 illustrates the dependence of on both and , while Fig. 9 in Sec. V.3 shows how depends on these parameters. The values of and that we find for each case are reported in Table 2. (We note that we do not explicitly match the average intercontact duration in each real network.)
IV.3 Properties of modeled vs. real networks
| Real network | |||||||
| High School | 327 | 18179 | 17 | 0.06 | 36 | 2.79 | 527 |
| Primary School | 242 | 5846 | 30 | 0.18 | 69 | 1.62 | 229 |
| Malawi Village | 86 | 57791 | 3.4 | 0.04 | 8.1 | 2.91 | 213 |
| ICEWS | 29047 | 401 | 1089 | 0.09 | 13 | 1.19 | 40 |
| Email-EU | 980 | 79 | 549 | 2.96 | 33 | 1.84 | 6.5 |
| Modeled network | |||||||
| High School | 18 | 0.06 | 36 | 2.75 | 482 | 0.67 | 0.46 |
| Primary School | 32 | 0.16 | 69 | 1.66 | 246 | 0.75 | 0.18 |
| Malawi Village | 3.4 | 0.05 | 7.9 | 2.90 | 228 | 0.45 | 0.38 |
| ICEWS | 1033 | 0.08 | 12 | 1.17 | 36 | 0.90 | 0 |
| Email-EU | 592 | 3.34 | 36 | 1.86 | 6.8 | 0.53 | 0 |
Table 2 gives an overview of the modeled counterparts. We see that their characteristics are overall very similar to the ones of the real networks in Table 2. Further, in Fig. 1 we also compare the following properties between real and modeled networks:
-
(a)
The contact distribution, which is the distribution of the number of consecutive slots in which a pair of nodes remains connected.
-
(b)
The intercontact distribution, which is the distribution of the number of consecutive slots in which a pair of nodes remains disconnected.
-
(c)
The weight distribution, which is the distribution of the edge weights in the time-aggregated network. In the time-aggregated network, two nodes are connected if they were connected in at least one slot, while the edge-weight in this network is the total number of slots in which the two end points of the edge were connected.
-
(d)
The strength distribution, which is the distribution of the node strengths in the time-aggregated network. The strength of a node is the sum of the weights of all edges attached to the node.
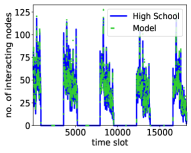
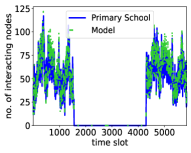
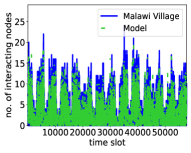
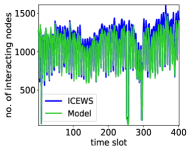
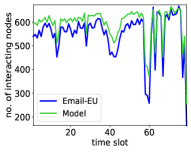
Fig. 1 shows that the modeled counterparts capture all the above properties in the real systems remarkably well. Further, Fig. 2 shows that the counterparts can also capture the variability of the number of interacting nodes per slot. The model can also capture several other properties of the considered real systems, as in Ref. Papadopoulos and Rodríguez-Flores (2019), which we omit here for brevity.





We note that in the ICEWS and Email-EU counterparts, suggesting that there is no link persistence in the corresponding real systems. On the other hand, in the counterparts of the considered face-to-face interaction networks. We note that one can model these systems using and still qualitatively reproduce their properties, cf. Papadopoulos and Rodríguez-Flores (2019), but the average contact and intercontact durations will be underestimated in that case. Specifically, the values of in synthetic counterparts of the high school, primary school, and Malawi village networks, constructed as described in Sec. IV.2 but with , are, respectively, , , and (versus the values in Tables 2 and 2).
In the next section we focus on the contact and intercontact distributions in the -dynamic-, and we prove their properties. We also analyze the expected time-aggregated degree in the model, elucidating its dependence on both the temperature and the link-persistence probability .
V Analysis
To facilitate the analysis, we assume , , i.e., that all snapshots have the same average degree . This assumption renders the connection probability in (1) the same in all time slots. However, we note that our analytical results follow closely the simulation results from the modeled counterparts of the previous section, where this assumption does not hold.
One of our main results is that for sufficiently sparse snapshots, , the contact and intercontact distributions decay as power laws with exponents and , irrespective of the value of the persistence probability . Technically, we consider these distributions in the limit . However, the same results also hold in the limit , which includes the case when is finite and (this case may be more relevant to some real networks, such as face-to-face interaction networks, where their size is relatively small but they are still sparse (cf. Table 2)). As it will become apparent, these results do not depend on the distribution of the expected node degrees, i.e., on . We begin with the contact distribution.
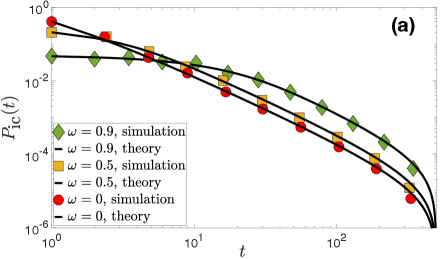
V.1 Contact distribution
Consider the probability to observe a sequence of exactly consecutive slots, where two nodes and with latent degrees and and angular distance are connected, . This probability, denoted by , is the percentage of observation time where we observe a slot where these two nodes are not connected, followed by slots where they are connected, followed by a slot where they are again not connected.
For each duration , there are possibilities where this duration can be realized. For instance, if the two nodes can be disconnected in slot , connected in slots and , and disconnected in slot , where . Therefore, the percentage of observation time where a duration of slots can be realized is
| (13) |
Clearly, for any finite , for .
For ease of exposition we use the symbol
| (14) |
and observe the following:
-
(i)
The probability that two nodes and are not connected in a slot is , where is given by (1).
-
(ii)
The probability that and are connected in slot , given that they are not connected in slot , is .
-
(iii)
The probability that and are connected in slots given that they are connected in slot , is .
-
(iv)
The probability that and are not connected in slot , given that they are connected in slot , is .
It is easy to see that the probability is the product of and the probabilities in points (i) to (iv) above,
| (15) |
We note that we do not consider the cases when the first (last) of the slots in which two nodes can be connected starts (ends) at the beginning (end) of the observation period . To account for these cases, one needs to add the extra term on the right hand side of (15). This term becomes insignificant for any finite as .
The contact distribution, , gives the probability that two nodes connect for exactly consecutive slots, given that they connect, i.e., given that . We can write
| (16) |
In the above relation, is obtained by removing the condition on and from (15),
| (17) |
where is the PDF of , while is the PDF of .
We note that empirically is computed as described in the caption of Fig. 1. Specifically, given a set of (nonzero) contact durations, the empirical is given by the ratio , where is the number of contact durations in the set that have length .
Removing the condition on from (15) yields
| (18) |
where
| (19) |
To reach (V.1), we perform the change of integration variable .
For , , and from (V.1) we have the following limit:
| (20) |
Removing now the condition on and gives
| (21) |
We note that we can exchange the order of the limit with the integrals in (V.1) since . Further, we note that (V.1) holds irrespective of the form of . Substituting with its expression in (3), and evaluating the integral in (V.1) (see Appendix A), yields
| (22) |
where is the Gauss hypergeometric function Olver et al. (2010). Therefore, for sufficiently large we can write
| (23) |
Figure 3 validates the above analysis.
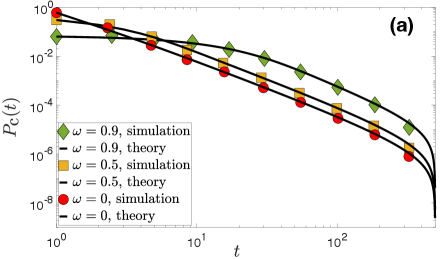
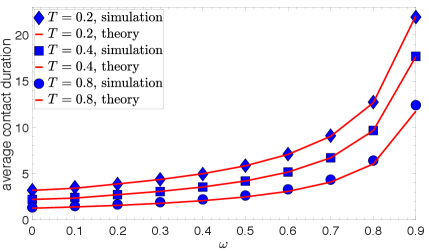
We note that the average contact duration, , depends on both the temperature and the link-persistence probability , as dictated by (23). In particular, increases with decreasing or with increasing ; see Fig. 4.
For , becomes the one in the dynamic- model Papadopoulos and Rodríguez-Flores (2019),
| (24) |
For , , while for , . Therefore, for , (24) decays as a power law,
| (25) |
Interestingly, below we show that for sufficiently large , also decays as the above power law for all .
Tail of . To deduce the behavior of the tail of for , we utilize an asymptotic expansion for the hypergeometric function for , given in section 2.3.2 of Ref. Bateman (1953) (Eq. (15) on p. 77). This expansion allows us to express the hypergeometric function in (23) for , as
| (26) |
Equation (V.1) means that for sufficiently large we can write
| (27) |
Further, since the dominant term in (V.1) is the first for large , we can write the following simplified expression:
| (28) |
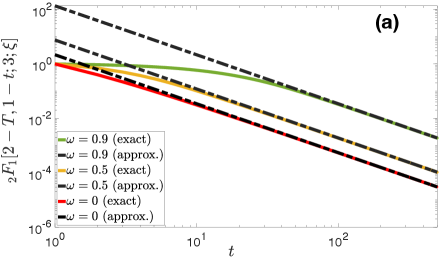
We note that since is fixed, , the approximations in (V.1) and (28) come into effect for sufficiently large . Figure (5) validates the above analysis.
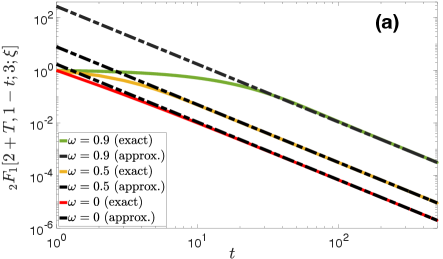
Therefore, for large , in (23) is proportional to for all . Next, we turn our attention to the intercontact distribution.
V.2 Intercontact distribution
To analyze the intercontact distribution we follow a similar procedure as in the contact distribution. Let be the probability to observe a sequence of exactly consecutive slots, where two nodes and with latent degrees and and angular distance are not connected, . This probability is the percentage of observation time where we observe a slot where these two nodes are connected, followed by slots where they are not connected, followed by a slot where they are again connected.
We observe the following:
-
(i)
The probability that two nodes and are connected in a slot is , given by (1).
-
(ii)
The probability that and are not connected in slot , given that they are connected in slot , is .
-
(iii)
The probability that and are not connected in slots given that they are not connected in slot , is .
-
(iv)
The probability that and are connected in slot , given that they are not connected in slot , is .
The probability is the product of in (13) and the probabilities in points (i) to (iv) above,
| (29) |
We note that considering adding an extra term on the right hand side of (29) analogous to the one discussed below (15) would be unnatural here, since by its name an intercontact duration must be enclosed between two contacts.
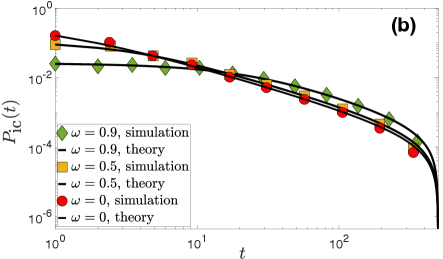
The intercontact distribution, , gives the probability that two nodes disconnect for exactly consecutive slots, given that they disconnect, i.e., given that . We can write
| (30) |
In the above relation, is obtained by removing the condition on and from (29),
| (31) |
We note that as with , given a set of (nonzero) intercontact durations, the empirical is given by the ratio , where is the number of intercontact durations in the set that have length .
Removing the condition on from (31) yields
| (32) |
where is given by (19). To reach (V.2), we again perform the change of integration variable .
For , , and from (V.2) we have the following limit:
| (33) |
We can now compute
| (34) |
Substituting with its expression in (3), and evaluating the integral in (V.2) (see Appendix B), yields
| (35) |
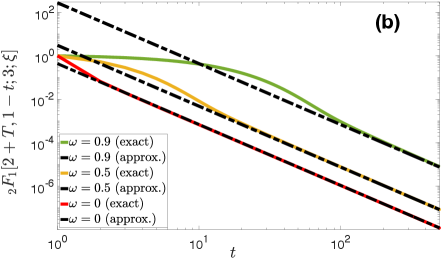
Therefore, for sufficiently large we can write
| (36) |
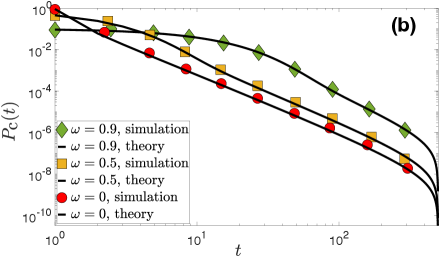
Figure 6 validates the above analysis.
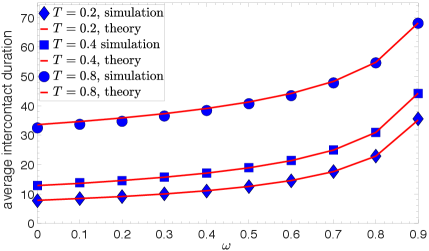
The average intercontact duration, , depends on both the temperature and the link-persistence probability , as dictated by (36). In particular, increases with increasing or with increasing ; see Fig. 7.
For , becomes the one in the dynamic- model Papadopoulos and Rodríguez-Flores (2019),
| (37) |
For , , while for , . Therefore, for , (37) decays as a power law,
| (38) |
Below, we show that for sufficiently large , also decays as the above power law for all .
Tail of . To deduce the behavior of the tail of for , we utilize again the expansion for for given in Eq. (15) on p. 77 of Ref. Bateman (1953). Using this expansion, we can express the hypergeometric function in (36) for as
| (39) |
Therefore, for sufficiently large we can write
| (40) |
Further, since the dominant term in the above relation is the first for large , we can write the following simplified expression:
| (41) |
Since is fixed, , the approximations in (V.2) and (41) come into effect for sufficiently large . Figure 8 validates the above analysis.
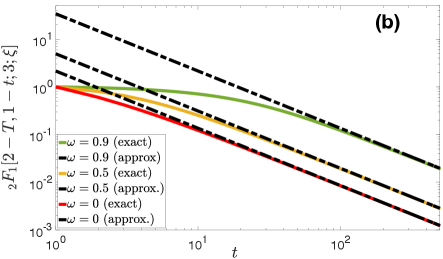
Therefore, for large , in (36) is proportional to for all .
V.3 Expected time-aggregated degree
Here we turn our attention to the expected time-aggregated degree, and show its dependence on both the temperature and the link-persistence probability . The expected time-aggregated node degree can be written as
| (42) |
where is the probability that two nodes connect at least once during the observation interval . Below, we derive the relation for for large .
Let be the probability that two nodes and with latent degrees and and angular distance do not connect during the observation interval . We can write
| (43) |
where is given by (1). Removing the condition on gives
| (44) |
where is given by (19). In the above relation, is the Appell series, which is a generalization of the hypergeometric function for two variables Olver et al. (2010). To reach (V.3), we perform the change of integration variable .
We note that for and , . Further, for . From (V.3), we have the following limit:
| (45) |
Removing the condition on and from (V.3), and substituting with its expression in (3), yields
| (46) |
Therefore, for sufficiently large we can write
| (47) |
For , the above expression becomes the one in the dynamic- model Papadopoulos and Rodríguez-Flores (2019),
| (48) |
The last approximation in (48) holds for . Further, we note that we can again utilize the expansion for for given in Eq. (15) on p. 77 of Ref. Bateman (1953) to simplify (47). Specifically, using this expansion, we can write (details are omitted for brevity) that for sufficiently large ,
| (49) |
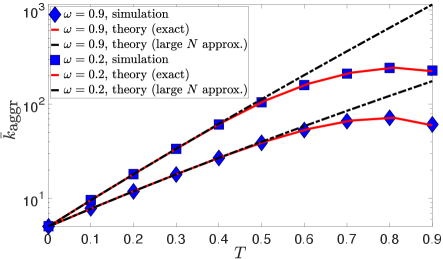
Fig. 9 validates our analysis. We see that (49) is a good approximation only for sufficiently low temperatures . In general, to accurately compute the expected time-aggregated degree for any temperature one would need to remove the condition on and from the exact expression in (V.3), a task that could be done numerically for any PDF , and use the result in (42).
VI Other related work
The work in Ref. Perra et al. (2012) introduced the activity-driven model (AD), while the work in Ref. Pozzana et al. (2017) extended this model to account for node attractiveness. However, the AD is not a geometric network model. Here, we considered a geometric temporal network model based on RHGs, which have been shown to adequately reflect reality. Further, link persistence has not been considered in the context of the AD. Finally, the analysis of the AD has mainly focused on properties of the resulting time-aggregated network, like its degree distribution Perra et al. (2012), and not on properties of the resulting temporal network itself, like its (inter)contact distributions.
The work in Ref. Zhang et al. (2017) proposed temporal extensions of popular static network models (random graphs, configuration model, stochastic block model) and provided algorithms for fitting the proposed extensions to observed network data. Even though this work considers link persistence, it does not consider temporal extensions of geometric network models, nor does it analyze the resulting temporal properties of the proposed extensions in terms of their realism.
The work in Ref. Mazzarisi et al. (2020) considers link persistence (also called stability) in dynamic networks, in conjunction with node hidden variables (or fitnesses) that determine the nodes’ capability of forming links, and it attempts to disentangle the importance of the two mechanisms (link persistence versus node hidden variables) in link formation in the interbank market. To this end, it considers a link-persistence model similar to the one we considered here. However, differently from this work, it does not consider RHGs, i.e., networks where the node hidden variables are their coordinates in their underlying hyperbolic space. Further, it does not analyze emergent dynamical properties, such as the (inter)contact distributions, and the effect of link persistence on them.
In Ref. Papadopoulos and Kleineberg (2019), a model based on RHGs similar to the -dynamic-, but with persistence only for connections (instead for both connections and disconnections), has been shown to better explain the high edge overlap across layers of real multiplex networks, compared to the case in which link persistence is ignored. We also note that the -dynamic- is a special case of the general class of temporal hidden-variable network models considered in Ref. Hartle et al. (2021), where there are no hidden variable dynamics. A review of other work related to the concept of persistence in temporal networks and in complex systems in general can be found in Ref. Salcedo-Sanz et al. (2022).
VII Discussion and conclusion
We have considered and analyzed a simple dynamical model of RHGs with link persistence, called -dynamic-. Despite its simplicity, the model simultaneously reproduces many dynamical properties observed in real systems, while providing flexibility in tuning the average contact and intercontact durations via the link-persistence probability . We have analyzed two main properties of interest, i.e., the distributions of contact and intercontact durations, and found that they both decay as power laws in the model with exponents that do not depend on . We have also analyzed the expected time-aggregated degree in the model.
In future work, it would be interesting to analyze other temporal network properties, such as the weight and strength distributions, cf. Fig. 1, and statistics related to components’ formation, cf. Ref. Papadopoulos and Rodríguez-Flores (2019). Further, it is desirable to explore generalizations of the model where connections and disconnections can persist with different probabilities (instead of with the common probability ). This would allow more flexibility for accurately capturing both the average contact and intercontact durations in real systems. We note that a mathematical analysis of such a generalization does not appear straightforward. Further, it is desirable to develop more sophisticated procedures for estimating the link persistence probabilities in real systems, e.g., based on maximum likelihood estimation. Also, it could be interesting to investigate the accuracy of the large- approximations [cf. Eqs. (23) and (36)] as a function of network sparsity (). Furthermore, it would be nice to investigate generalizations of the model that would allow the nodes’ latent variables to change over time (in the simplest case, via jump or walk dynamics as in Ref. Hartle et al. (2021)) and analyze the effect of the latent variables’ motion on the resulting (inter)contact distributions and other temporal network properties. Finally, it would be interesting to investigate the exact effects of link persistence on spreading processes and related measures, such as the ones considered in Refs. Vazquez et al. (2007); Karsai et al. (2011).
Taken altogether, our results advance our understanding of the realistic modeling of temporal networks with RHGs and of the effects of link persistence on temporal network properties. In addition to their explanatory power, parsimonious models, like the -dynamic-, are also important for applications as they can constitute the basis of maximum likelihood estimation methods that more realistically infer the node coordinates and their evolution in the latent spaces of real systems Kim et al. (2018).
Acknowledgements
We thank M. A. Rodríguez-Flores for preparing the Email-EU data. S. Z. and F. P. acknowledge support by the TV-HGGs project (OPPORTUNITY/0916/ERC-CoG/0003), co-funded by the European Regional Development Fund and the Republic of Cyprus through the Research and Innovation Foundation. H. H. acknowledges support from NSF grant IIS-1741355.
Appendix A Evaluating the integral in Equation (V.1)
We first recall that the hypergeometric function is defined by the Gauss series
| (51) |
for , and by analytic continuation elsewhere Olver et al. (2010). The symbol is the Pochhammer symbol, defined as for , and for . Further, the following identity holds, known as Pfaff’s transformation (Eq. 15.8.1 in Ref. Olver et al. (2010)):
| (52) |
Using (52) for gives
| (53) |
Also, using (52) for gives
| (54) |
Now, using (53) and (54), we can rewrite (A) as
| (55) |
Equation (A) can be simplified by utilizing two of Gauss’s relations between contiguous hypergeometric functions, namely, Eqs. (34) and (42) in Sec. 2.8 of Ref. Bateman (1953), shown below,
| (56) |
and
| (57) |
Specifically, using (A) with , and , we can write
| (58) |
Also, using (A) with , and , we have
| (59) |
Now, from (A) we can rewrite (A) as
| (60) |
Further, from (A) we can simplify (A) to
| (61) |
Using the above relation in (V.1), and noticing that , yields (22).
Appendix B Evaluating the integral in Equation (V.2)
References
- Krioukov et al. (2009) D. Krioukov, F. Papadopoulos, A. Vahdat, and M. Boguñá, “Curvature and temperature of complex networks,” Phys. Rev. E 80, 035101(R) (2009).
- Krioukov et al. (2010) D. Krioukov, F. Papadopoulos, M. Kitsak, A. Vahdat, and M. Boguñá, “Hyperbolic geometry of complex networks,” Phys. Rev. E 82, 036106 (2010).
- Gugelmann et al. (2012) L. Gugelmann, K. Panagiotou, and U. Peter, “Random hyperbolic graphs: Degree sequence and clustering,” in Proc. of ICALP (2012) pp. 573–585.
- Boguñá et al. (2020) M. Boguñá, D. Krioukov, P. Almagro, and M. Á. Serrano, “Small worlds and clustering in spatial networks,” Phys. Rev. Research 2, 023040 (2020).
- Fountoulakis et al. (2021) N. Fountoulakis, P. van der Hoorn, T. Muller, and M. Schepers, “Clustering in a hyperbolic model of complex networks,” Electronic Journal of Probability 26, 1–132 (2021).
- Boguñá et al. (2010) M. Boguñá, F. Papadopoulos, and D. Krioukov, “Sustaining the internet with hyperbolic mapping,” Nature Communications 1, 62 EP – (2010).
- Papadopoulos et al. (2015a) F. Papadopoulos, C. Psomas, and D. Krioukov, “Network mapping by replaying hyperbolic growth,” IEEE/ACM Transactions on Networking 23, 198–211 (2015a).
- Papadopoulos et al. (2015b) F. Papadopoulos, R. Aldecoa, and D. Krioukov, “Network geometry inference using common neighbors,” Phys. Rev. E 92, 022807 (2015b).
- Kleineberg et al. (2016) K.-K. Kleineberg, M. Boguñá, M. Á. Serrano, and F. Papadopoulos, “Hidden geometric correlations in real multiplex networks,” Nature Physics 12, 1076–1081 (2016).
- García-Pérez et al. (2019) G. García-Pérez, A. Allard, M Á. Serrano, and M. Boguñá, “Mercator: uncovering faithful hyperbolic embeddings of complex networks,” New Journal of Physics 21, 123033 (2019).
- Serrano et al. (2012) M. Ángeles Serrano, Marián Boguñá, and Francesc Sagués, “Uncovering the hidden geometry behind metabolic networks,” Mol. BioSyst. 8, 843–850 (2012).
- Lehman et al. (2016) V. Lehman, A. Gawande, B. Zhang, L. Zhang, R. Aldecoa, D. Krioukov, and L. Wang, “An experimental investigation of hyperbolic routing with a smart forwarding plane in NDN,” in Proc. of IEEE/ACM IWQoS (2016) pp. 1–10.
- Allard and Serrano (2020) A. Allard and M. Á. Serrano, “Navigable maps of structural brain networks across species,” PLOS Computational Biology 16, 1–20 (2020).
- Osat et al. (2022) S. Osat, F. Papadopoulos, A. S. Teixeira, and F. Radicchi, “Embedding-aided network dismantling,” (2022), 10.48550/ARXIV.2208.01087.
- Papadopoulos and Rodríguez-Flores (2019) F. Papadopoulos and M. A. Rodríguez-Flores, “Latent geometry and dynamics of proximity networks,” Phys. Rev. E 100, 052313 (2019).
- Rodríguez-Flores and Papadopoulos (2018) M. A. Rodríguez-Flores and F. Papadopoulos, “Similarity forces and recurrent components in human face-to-face interaction networks,” Phys. Rev. Lett. 121, 258301 (2018).
- Scherrer et al. (2008) A. Scherrer, P. Borgnat, E. Fleury, J. L. Guillaume, and C. Robardet, “Description and simulation of dynamic mobility networks,” Complex Computer and Communication Networks, Computer Networks 52, 2842–2858 (2008).
- (18) “Contact duration,” http://www.sociopatterns.org/2008/10/contact-duration/, accessed: August, 2022.
- Hui et al. (2005) P. Hui, A. Chaintreau, J. Scott, R. Gass, J. Crowcroft, and C. Diot, “Pocket switched networks and human mobility in conference environments,” in Proceedings of the ACM SIGCOMM Workshop on Delay-tolerant Networking, WDTN 05 (ACM, New York, 2005) pp. 244–251.
- Chaintreau et al. (2007) A. Chaintreau, P. Hui, J. Crowcroft, C. Diot, R. Gass, and J. Scott, “Impact of human mobility on opportunistic forwarding algorithms,” IEEE Transactions on Mobile Computing 6, 606–620 (2007).
- Takaguchi et al. (2011) T. Takaguchi, M. Nakamura, N. Sato, K. Yano, and N. Masuda, “Predictability of conversation partners,” Phys. Rev. X 1, 011008 (2011).
- Fournet and Barrat (2014) J. Fournet and A. Barrat, “Contact patterns among high school students,” PLOS ONE 9, 1–17 (2014).
- Rodríguez-Flores and Papadopoulos (2020) M. A. Rodríguez-Flores and F. Papadopoulos, “Hyperbolic Mapping of Human Proximity Networks,” Sci. Rep. 10, 20244 (2020).
- Papadopoulos and Zambirinis (2022) F. Papadopoulos and S. Zambirinis, “Dynamics of hot random hyperbolic graphs,” Physical Review E 105, 024302 (2022).
- Mazzarisi et al. (2020) P. Mazzarisi, P. Barucca, F. Lillo, and D. Tantari, “A dynamic network model with persistent links and node-pecific latent variables, with an application to the interbank market,” European Journal of Operational Research 281, 50–65 (2020).
- Papadopoulos and Kleineberg (2019) F. Papadopoulos and K.-K. Kleineberg, “Link persistence and conditional distances in multiplex networks,” Phys. Rev. E 99, 012322 (2019).
- Hartle et al. (2021) H. Hartle, F. Papadopoulos, and D. Krioukov, “Dynamic hidden-variable network models,” Phys. Rev. E 103, 052307 (2021).
- Conti and Giordano (2014) M. Conti and S. Giordano, “Mobile ad hoc networking: milestones, challenges, and new research directions,” IEEE Communications Magazine 52, 85–96 (2014).
- Vazquez et al. (2007) A. Vazquez, B. Rácz, A. Lukács, and A.-L. Barabási, “Impact of non-poissonian activity patterns on spreading processes,” Phys. Rev. Lett. 98, 158702 (2007).
- Smieszek (2009) T. Smieszek, “A mechanistic model of infection: why duration and intensity of contacts should be included in models of disease spread,” Theoretical Biology and Medical Modelling 6, 25 (2009).
- Karsai et al. (2011) M. Karsai, M. Kivelä, R. K. Pan, K. Kaski, J. Kertész, A.-L. Barabási, and J. Saramäki, “Small but slow world: How network topology and burstiness slow down spreading,” Phys. Rev. E 83, 025102 (2011).
- Machens et al. (2013) A. Machens, F. Gesualdo, C. Rizzo, A. E. Tozzi, A. Barrat, and C. Cattuto, “An infectious disease model on empirical networks of human contact: bridging the gap between dynamic network data and contact matrices,” BMC Infectious Diseases 13, 185 (2013).
- Gauvin et al. (2013) L. Gauvin, A. Panisson, C. Cattuto, and A. Barrat, “Activity clocks: spreading dynamics on temporal networks of human contact,” Sci. Rep. 3, 3099 EP – (2013).
- Papadopoulos et al. (2012) F. Papadopoulos, M. Kitsak, M. Á. Serrano, M. Boguñá, and D. Krioukov, “Popularity versus similarity in growing networks,” Nature 489, 537 EP – (2012).
- Boguñá and Pastor-Satorras (2003) M. Boguñá and R. Pastor-Satorras, “Class of correlated random networks with hidden variables,” Phys Rev E 68, 036112 (2003).
- Dorogovtsev (2010) S. N. Dorogovtsev, Lectures on Complex Networks (Oxford University Press, Oxford, 2010).
- (37) “Sociopatterns,” http://www.sociopatterns.org/, accessed: August, 2022.
- Mastrandrea et al. (2015) R. Mastrandrea, J. Fournet, and A. Barrat, “Contact patterns in a high school: A comparison between data collected using wearable sensors, contact diaries and friendship surveys,” PLoS ONE 10, e0136497 (2015).
- Stehlé et al. (2011) J. Stehlé, N. Voirin, A. Barrat, C. Cattuto, L. Isella, J.-F. Pinton, M. Quaggiotto, W. Van den Broeck, C. Régis, B. Lina, and P. Vanhems, “High-resolution measurements of face-to-face contact patterns in a primary school,” PLoS ONE 6, e23176 (2011).
- Ozella et al. (2021) L. Ozella, D. Paolotti, G. Lichand, J. P. Rodríguez, S. Haenni, J. Phuka, O. B. Leal-Neto, and C. Cattuto, “Using wearable proximity sensors to characterize social contact patterns in a village of rural Malawi,” EPJ Data Science 10, 46 (2021).
- Boschee et al. (2015) E. Boschee, J. Lautenschlager, S. O’Brien, S. Shellman, J. Starz, and M. Ward, “ICEWS Coded Event Data,” (2015).
- (42) “email-Eu-core temporal network,” https://snap.stanford.edu/data/email-Eu-core-temporal.html, accessed: August, 2022.
- Paranjape et al. (2017) A. Paranjape, A. R. Benson, and J. Leskovec, “Motifs in temporal networks,” in Proceedings of the Tenth ACM International Conference on Web Search and Data Mining, WSDM ’17 (Association for Computing Machinery, New York, USA, 2017) pp. 601–610.
- Olver et al. (2010) F. W. Olver, D. W. Lozier, R. F. Boisvert, and C. W. Clark, NIST Handbook of Mathematical Functions, 1st ed. (Cambridge University Press, New York, USA, 2010).
- Bateman (1953) Harry Bateman, Higher transcendental functions, [Volumes I-III], Vol. 1 (McGraw-Hill Book Company, 1953).
- Perra et al. (2012) N. Perra, B. Gonçalves, R. Pastor-Satorras, and A. Vespignani, “Activity driven modeling of time varying networks,” Sci. Rep. 2, 469 (2012).
- Pozzana et al. (2017) I. Pozzana, K. Sun, and N. Perra, “Epidemic spreading on activity-driven networks with attractiveness,” Phys. Rev. E 96, 042310 (2017).
- Zhang et al. (2017) X. Zhang, C. Moore, and M. E. J. Newman, “Random graph models for dynamic networks,” The European Physical Journal B 90, 200 (2017).
- Salcedo-Sanz et al. (2022) S. Salcedo-Sanz, D. Casillas-Pérez, J. Del Ser, C. Casanova-Mateo, L. Cuadra, M. Piles, and G. Camps-Valls, “Persistence in complex systems,” Physics Reports 957, 1–73 (2022).
- Kim et al. (2018) B. Kim, K. H. Lee, L. Xue, and X. Niu, “A review of dynamic network models with latent variables,” Statist. Surv. 12, 105–135 (2018).
- (51) Wolfram Research, Inc., “Mathematica, Version 13.1,” Champaign, IL, 2022.