Efficient space-time discretizations for tracking the boundaries of reachable sets
Abstract
The reachable sets of nonlinear control systems can in general only be numerically approximated, and are often very expensive to calculate. In this paper, we propose an algorithm that tracks only the boundaries of the reachable sets and that chooses the temporal and spatial discretizations in a non-uniform way to reduce the computational complexity.
Mathematics Subject Classification: 93B03, 65L50.
Keywords: Reachable sets of control systems; Numerical approximation; Boundary tracking; Efficient discretization; Euler’s method.
1 Introduction
The reachable set of a control system represents all possible states the system can attain at a given time. Reachable sets have applications in several different fields, which are often, but not always, related to safety and security [5, 6, 13]. Since explicit formulas for reachable sets are not usually available, we instead must rely on numerical approximation. These approximations are expensive to compute as they need to track an entire set that evolves according to a multivalued flow. In particular, they require a spatial discretization of the set as well as a temporal discretization of the dynamics.
The numerical methods for the computation of reachable sets are split into those which are designed specifically for linear control systems, and those which are applicable to nonlinear systems.
The reachable sets of linear systems are convex and behave in a rather straightforward way. This enables the creation of numerical methods which are theoretically robust and perform well in practice, taking advantage of the fact that the sets can be approximated by relatively simple shapes such as zonotopes [1, 7, 19] or ellipsoids [10], or by a finite number of support points [2, 11].
The shape and behavior of reachable sets of nonlinear control systems is more complex, and so it is unclear how they can be discretized and evolved in the most efficient way. For this reason, several different families of numerical methods have been proposed.
One such family applies the linear methods discussed above to local linearizations of nonlinear systems. Due to the linearization errors, the performance of these methods can depend on the degree of their nonlinearity (see [18] for an analysis).
Another family of algorithms, which are based on optimal control [3, 14], can significantly improve practical performance at the expense of losing guaranteed convergence. These methods use solvers for optimal control problems to approximate the reachable set at a particular time, and thus eliminate the need for spatial discretization at intermediate timesteps at the risk of getting caught in local minima and losing a significant part of the set.
Finally, Runge-Kutta methods for nonlinear differential equations can be generalized to reachable set approximation. Typically, first-order methods are used, as even second-order convergence has prohibitively strict requirements on the control system [20, 21]. Spatial discretization for these methods generally involves representing the reachable set as a subset of a grid [4, 9]. Since these subsets can become very large, storage and computational cost can be reduced by an intelligent choice of discretization [17], or by considering only the boundaries of the reachable sets [15].
In this paper, we aim to combine the benefits of the algorithms proposed in [15] and [17] in a new numerical method for reachable set computation. The boundary tracking algorithm from [15] is essentially a fully discretized set-valued Euler scheme, but it reduces computational complexity by evolving only the boundary of the reachable set in time, and evaluating only the boundary of the multivalued vector field of the control system. The adaptive refinement strategy pursued in [17] aims to identify a space-time discretization with a given a priori error tolerance that minimizes the computational cost of the set-valued Euler scheme. To develop an algorithm that possesses both advantages, we proceed as follows.
After setting our notation and introducing reachable sets and their Euler approximations in Sections 2 and 3, we first have to overcome two technical obstacles in Section 4: The boundary tracking algorithm as published in [15] stores boundaries of discrete reachable sets in an ad-hoc fashion, without exploring the space of all such boundaries from a theoretical perspective. In order to take the algorithm further, we must do so now, and embed it into the framework of [16] for working with boundaries of discrete sets. Furthermore, it turns out that a naive generalization of the algorithm to nonuniform meshes fails, and we introduce appropriate modifications.
In Section 5, we develop an abstract scheme that refines a given space-time discretization until a prescribed error tolerance is met. It is a greedy algorithm in the sense that every refinement step subdivides the time interval where the quotient of the decrease in error and the increase in computational cost is maximized. In Section 6, we derive a concrete estimator for the computational cost of the boundary tracking algorithm for nonuniform discretizations, and prove that it meets the requirements of the abstract refinement scheme. The resulting algorithm is conceptually similar to the method from [17]. It alternates between computing approximate boundaries of the reachable sets for a given space-time discretization and, based on this knowledge of their geometry, refining the mesh. We demonstrate that this process converges in finite time.
Finally, we present two numerical examples in Section 7, which suggest that our algorithm has the potential to outperform the Euler scheme with uniform discretization from [4], the boundary tracking algorithm with uniform discretization from [15] and the Euler scheme with adaptive discretization from [17].
2 Notation
We denote , , and . When is an interval, and when it is clear that or , we will write instead of or . In addition to the usual -dimensional vector space , we introduce the space
and define the cumulative sum by for all . We also denote
and we extend this notation to in the obvious way. We equip with
and we define the ball with center and radius by
The cardinality of a set is denoted , and its boundary .
Let and denote the collections of all nonempty and compact subsets of , and all nonempty, compact and convex subsets of , respectively. The Hausdorff distance is given by
where
To approximate , for every , we consider the grid and the collections of digital images
By we denote the collection of all sets , i.e. sets with the property that for any there exists a finite sequence with , and for all . These are called chain-connected sets in [15, Definition 9] and -connected sets (in the plane) in [8, Section 2.2.1].
Finally, a set-valued map is called -Lipschitz with if
and when , we denote .
3 Reachable sets and their approximations
In the following, we briefly introduce reachable sets and a common approach to their numerical computation.
3.1 Reachable sets of differential inclusions
We consider the differential inclusion
| (1) |
where is path-connected, and is -Lipschitz and satisfies the uniform bound
| (2) |
We are interested in the following sets associated with inclusion (1).
Definition 3.1.
The solution set and the reachable sets of inclusion (1) are
3.2 The Euler scheme for uniform grids
We discretize the space in a way that is similar to outer Jordan digitization, see [8, Definition 2.8].
Lemma 3.2.
For any numbers with , the mapping
is well-defined, and for all path-connected , we have .
The Euler map approximates the flow of inclusion (1).
Definition 3.3.
For any given , we define the set-valued functions and by
The following proposition is nearly identical to [15, Proposition 12] and is essential for the boundary tracking algorithm to be discussed in Section 4 to work.
Proposition 3.4.
Let , and define
| (3) |
Then for any and , we have .
The following Euler scheme for approximating the reachable sets from Definition 3.1 employs a uniform discretization: Every timestep has length , and every point computed is an element of .
Definition 3.5.
Let , let , and let . Then the set of all Euler approximations to inclusion (1) is
and the corresponding approximate reachable sets are
| (4) |
4 Boundary tracking for nonuniform grids
In this section we introduce a storage format for boundaries of digital images, and summarize how the algorithm from [15] tracks the boundaries of the reachable sets from (4). Finally, we show how the restriction operator from [16] helps to overcome technical difficulties that arise when nonuniform discretizations are considered.
4.1 Boundary pairs of digital images
We restate the definition of boundary layers of digital images from [15]. They are related to the so-called distance transform [8, Section 3.4.2].
Definition 4.1.
For every and , we define
The following theorem summarizes the relevant results from [16]:
-
i)
Every digital image, i.e. every element of , is uniquely characterized by the pair .
- ii)
For an illustration of the theorem see the first diagram in Figure 1.
Theorem 4.2.
For every , the mapping
is injective, and we write and .
For nested grids with , the operator given by satisfies
| (6) | ||||
| (7) | ||||
and the lifted operator
| (8) |
is well-defined.
The mapping can be implemented efficiently, see [16, Algorithm 1].
4.2 Boundary tracking for uniform grids
In view of Proposition 3.4, the operator
| (9) |
with as in (3) is well-defined. It completes the second diagram in Figure 1. The boundary tracking algorithm from [15] uses to lift recursion (5), which evolves the full reachable sets, to a recursion
Since is path-connected, it follows from Lemma 3.2 and (9) that
| (10) |
The following theorem is the main result from [15], which allows us to evaluate directly, i.e. without knowledge of . Statement (10) is essential for its proof, which relies on topological arguments.
Theorem 4.3.
Let and , denote from (3) and
| (11) |
and let . Furthermore, consider the set-valued mappings and given by
and the sets
| (12) |
Then we can form the auxiliary collections
| (13) |
and we can express with the pair given by
in terms of , and .
Theorem 4.3 is the theoretical foundation for Algorithm 1, which is displayed on page 1. Note that it is easy and inexpensive to compute the sets in (12). Figure 2 provides a sketch of the sets used to calculate (13).
4.3 An Euler scheme for nonuniform grids
We present a numerical method that generalizes the Euler scheme from Section 3.2 to nonuniform temporal and spatial discretization parameters
and is specifically designed to support the boundary tracking algorithm to be proposed in Section 4.4. The vector contains stepsizes with , the vector stores the temporal nodes, and the vector stores the mesh sizes of the spatial grids associated with the temporal nodes .
The following mapping is to be interpreted as a single Euler step with stepsize and blow-up from the grid to the grid . The reason for its particular construction will become apparent in Theorem 4.8.
Definition 4.4.
Our next result generalizes Proposition 3.4.
Corollary 4.5.
Let with , and let be as in Proposition 3.4. Then for any , we have
Proof.
We generalize Definition 3.5 to nonuniform discretizations.
Definition 4.6.
The proof of the following error bound is very similar to proofs in the literature, see e.g. [4] and [9]. The additive error terms occur whenever the operator is invoked, see Definition 4.4.
Theorem 4.7.
4.4 Boundary tracking for nonuniform grids
In view of Corollary 4.5, the mapping
is an operator . Its action is illustrated in the third diagram in Figure 1. It allows us to lift iteration (16) to the recursion
| (17) | ||||
which is displayed on page 2 as Algorithm 2. Again because of Lemma 3.2, we have for all . Note that these iterates are the boundary pairs of the sets which satisfy the error bound (15).
To carry out recursion (17) without knowledge of the set , we would ideally like to generalize Theorem 4.3 to nonuniform grids. An inspection of its proof, given in [15], shows that the theorem remains valid when . Elementary counterexamples show, however, that the theorem is false when . The construction in Definition 4.4 circumvents this problem, as it allows the representation (19) below.
Theorem 4.8.
Proof.
Algorithm 1 implements the operator as proposed in Theorem 4.8. In addition to an image , it returns the numbers and of grid points, which can be counted incidentally and are the key ingredients for the surrogate volumes (42) and (43). An implementation of the operator , which occurs in line 1, is available in [16, Algorithm 1].
5 An abstract subdivision scheme
The primary contribution of this paper is Algorithm 4, displayed on page 4, which alternates between executing recursion (17) and refining the discretization based on information gathered in the recursion. This section develops an abstract subdivision scheme for the latter aspect, displayed as Algorithm 3 on page 3, which will be applied to concrete cost and error estimators and in Section 6.
The following discretizations are admissible for the subdivision process.
Definition 5.1.
By we denote the set of all tuples such that
| (21) | |||
| (22) | |||
| (23) | |||
| (24) |
Additionally, we denote
We will refine a given discretization by repeated subdivision according to the following rule.
Definition 5.2.
Given any and , we define the function
| (25) |
given by
| (26) | ||||
Throughout the rest of this section, we consider two functions
that assign a number to every admissible discretization, and the change
in these functions caused by the subdivision rule . We assume that these functions have the following properties:
-
P1
There exists a function such that and holds for all and .
-
P2
There exists a strictly increasing function such that and holds for all , all and all .
-
P3
We have for all and .
-
P4
There exists such that
holds for all , all and all .
Remark 5.3.
The following lemma is derived from (25) by a straightforward induction.
Lemma 5.4.
Let , and let the sequences , , and be generated by Algorithm 3 from . Then for all .
If the spatial discretizations generated by Algorithm 3 do not become uniformly arbitrarily fine, then there exists a particular node at which the discretization eventually remains constant.
Lemma 5.5.
Assume that Algorithm 3 does not terminate, and that the sequences , , and with it generates satisfy
| (27) |
Then there exist and such that for all , there exists with and .
Proof.
By statement (26), the sequence is a monotone decreasing sequence of positive numbers. Hence there exists with . By statement (27), we have , and it follows from statement (23) that there exists with
| (28) |
Hence the sets
are nonempty and closed subsets of the compact set . By statements (26) and (28), we also have for all , so by [12, Theorem 26.9], we have , which yields the desired result. ∎
If Algorithm 3 does not terminate, then the event that the currently finest spatial discretization is refined in line 3 occurs infinitely often.
Lemma 5.6.
If Algorithm 3 does not terminate in finite time and generates sequences , , and with , then the set is infinite.
Proof.
Assume that is finite, and take , so that
| (29) |
We assert by induction that this implies
| (30) |
This is clearly true for . If (30) holds for some , then by (23) and (29), we have , so by statement (26) we find that (30) holds with in lieu of .
To derive a contradiction, we introduce the auxiliary function
By (30) we have and hence for all and . Together with (23), we obtain that
| (31) |
and hence that for all . Using (26), it is easy to check that
which implies that for , we have . By (31), this forces . In particular, we have
which implies . Since , this contradicts the definition of . ∎
Now we prove that Algorithm 3 terminates in finite time.
Theorem 5.7.
Proof.
Assume that Algorithm 3 does not terminate. Then it generates sequences , and with for all and
| (32) |
In the following, we show that
| (33) |
which, in conjunction with property P1, contradicts (32). This, combined with Lemma 5.4, completes the proof.
We obtain from property P2 that
| (34) |
and by construction, we have
| (35) |
Combining (34) and (35) yields
| (36) |
If statement (33) is false, then by Lemma 5.5, there exist and such that, for every , there exists with
| (37) |
By Lemma 5.6, the set
is infinite, and hence is infinite as well. By property P3, we have
| (38) |
If for some and , then the condition in line 3 of Algorithm 3 is false, and so line 3 yields the contradiction . Hence
so line 3 is executed in iteration for all , and thus we have
By (34) and (38), by (34) and property P2, by (37), and by (36), we have
However, in view of the definition of , property P4 and (37) provide
contradicting the above statement. ∎
6 Efficient discretizations for boundary tracking
We wish to measure the quality of a discretization
in terms of the a priori error of the corresponding discrete reachable sets and the cost of their computation. This will allow us to select a discretization with a high benefit-to-cost ratio. To this end, we split the a priori error bound
| (39) |
from Theorem 4.7 for the reachable sets computed in recursion (17) into the contribution from the discretization of the initial set and the contributions
from the discretization of the dynamics on each subinterval for , where we use the notation
Since there is no straightforward a priori formula for the computational cost of recursion (17) available, we derive a heuristic estimator based on a posteriori knowledge from previously performed computations in Section 6.1. We verify in Section 6.2 that this cost estimator and the a priori error estimate (39) satisfy properties P1 to P4, which means that it is safe to carry out the subdivision scheme from Section 5 with these particular inputs.
6.1 Estimating the computational cost
We first collect some preliminaries:
-
i)
Recall that is the dimension of the state space, and let
Then the numbers
are a good guess for the dimension of the boundary of the reachable sets and the boundary of the right-hand side , see Figure 3 for an illustration. From here forward, we assume that to rule out pathological situations.
- ii)
Now we derive the cost estimator. The exact cost, in terms of grid points computed, of carrying out recursion (17) with a given discretization is
| (41) | ||||
where we used the notation
from (3) and (11). It can, however, only be determined after the reachable sets have been computed.
For this reason, we pursue an iterative approach, see Algorithm 4, in which we alternate between executing recursion (17) and refining the discretization based on information gathered in the recursion. Assuming that at some point of the iteration, we have determined
-
i)
a discretization ,
-
ii)
the corresponding reachable sets , , from (17), and
-
iii)
the corresponding exact complexities for ,
we proceed as follows:
-
i)
First we compute the surrogate surface areas
(42) (43) based on the following heuristic: Equation (42) estimates the surface area of the reachable sets by counting the average number of grid points in the sets for and multiplying this number by the surface area of one face of a cube with diameter . Equation (43) estimates the average area of for in a similar way, taking into account the scaling of with and the blowup size in evaluating with parameters , and , see (18) and Figure 2.
-
ii)
Next, setting , we interpolate the estimates and with piecewise linear splines
and form their product .
- iii)
6.2 Verifying hypotheses P1 to P4
In the following, we show that for a given, fixed the functions and from (39) and (44) satisfy properties P1 to P4.
Lemma 6.1.
We have
| (45) | |||
| (46) | |||
| (47) |
We collect some statements that follow directly from the definition (40).
Lemma 6.2.
The function is monotone increasing in both arguments. In particular, the constant satisfies
| (48) |
Furthermore, for all , we have
| (49) | |||
| (50) |
Proof.
Proof.
Proof.
In view of inequalities (54) and (60) proved below, we have
and the function is obviously continuous and strictly increasing with . We consider three different cases.
Case 1: When , comparing terms in the sum (39) yields
By (23), we have
and using (45) we estimate
| (54) | ||||
Case 2: When , comparing terms in the sum (39) yields
| (55) | ||||
Substituting the definitions and canceling terms yields
Using (45), we immediately obtain
and using (23), we see that
Combining the above yields
| (56) |
We estimate the remaining difference
by breaking it into parts. Since , using (22), we obtain
| (57) | ||||
Using (46), we estimate
Substituting , it follows from (47) with in lieu of that
Finally, algebraic manipulations, (24) and (45) yield
| (58) | ||||
Because of (22) we have , so summing up inequalities (57) to (58) and expanding the cubic term yields
| (59) | ||||
In view of (55), combining inequalities (56) and (59), and using (22) and (24) yields
| (60) | ||||
Lemma 6.5.
Proof.
Proof.
Once again, we denote
| (65) |
Defining
we aim to show that
| (66) |
holds for all . Combining (66) with Lemma 6.5, which states that there exists such that
Case 1: When , comparing terms in the sum (44), and using (48) and (65) yields
where the last inequality in the case is derived from (24) and (65) by the computation
We summarize the results of this section.
Theorem 6.7.
Proof.
Algorithm 4 is initialized with the values , , and . It is easy to verify that we have .
Assume that Algorithm 4 has generated and for some . By Lemma 3.2, the computation in line 4 of Algorithm 4 yields a pair , which is a valid input for Algorithm 2. In view of Algorithm 2, the product satisfies for all , so by Lemmas 6.3 - 6.6 the functions and from (44) and (39) satisfy properties P1, P2, P3, and P4. Hence Theorem 5.7 guarantees that Algorithm 3 terminates in finite time and computes satisfying .
Now the statement of the theorem follows by induction. ∎
7 Numerical examples
| 7 | 8 | 9 | 10 | 11 | |||
|---|---|---|---|---|---|---|---|
| 3.2E1 | 1.6E1 | 8.0E0 | 4.0E0 | 2.0E0 | |||
| Relative error | 5.9E-1 | 2.9E-1 | 1.5E-1 | 7.3E-2 | 3.7E-2 | ||
|
1.90E-1 | 1.99E0 | 2.41E1 | 3.70E2 | 9.53E3 | ||
|
1.28E-1 | 2.00E0 | 1.34E1 | 1.99E2 | 4.71E3 | ||
|
2.96E-3 | 1.01E-2 | 5.56E-2 | 2.91E-1 | 1.19E0 |
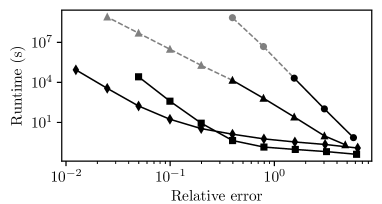
In this section, we compare Algorithm 4 with three other methods for reachable set computation. We introduce the following abbreviations, where B stands for the boundary method, E stands for the plain Euler scheme, A stands for adaptive, and U stands for uniform:
-
BA:
Algorithm 4 from above,
-
BU:
the boundary tracking algorithm with uniform discretization from [15],
-
EA:
the Euler scheme with adaptive discretization from [17], and
- EU:
We measure the quality of a numerical solution in terms of the a priori error bounds given in the literature for each scheme (bound (39) for Algorithm 4) and the computational cost in terms of runtime.
We first consider a very simple example in which all relevant quantities and the reachable sets are explicitly known.
Example 7.1.
Let and , and consider the differential inclusion in given by
| (70) |
The exact reachable sets are
and we have and .
We first consider Algorithm (4) when applied to system (70) with and the error tolerance , which converts to a relative error. Table 1 shows how the runtime of Algorithm 4 is distributed.
- i)
- ii)
- iii)
All in all, the computations confirm that the cost estimator from (44) is a sensible measure of the computational complexity of Algorithm 4.
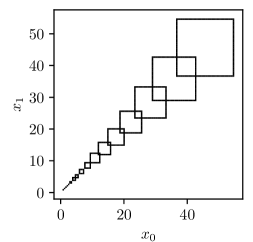
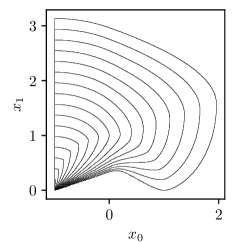
Figure 4 shows the resulting approximate reachable set boundaries generated by Algorithm 4. Sets shown are taken at times
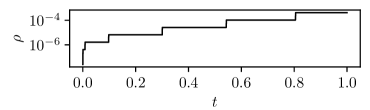
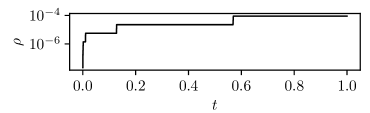
Figure 5 shows that the adaptive refinement strategy of Algorithm 4 works as intended. Initially, the reachable set is small, and a very fine temporal and spatial discretization can be selected at a low cost. Since the local errors are propagated exponentially, choosing a small mesh size near is very desirable. The opposite arguments hold for larger .
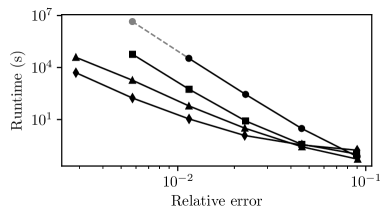
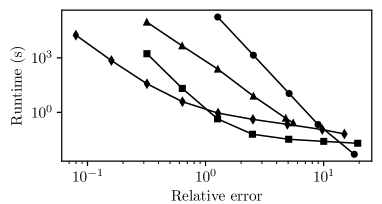
To test the performance of Algorithm 4 (BA) against previous algorithms BU, EA, and EU, we now consider system (70) with . Figure 6 shows that in terms of runtime, Algorithm BA from this paper performs best. Interestingly, the rate at which the runtime increases is very similar for both boundary methods, BA and BU, as well as for both Euler methods EA and EU.
The following example is inspired by [14, Example 4.1].
Example 7.2.
Let , and consider the problem
| (71) |
with Lipschitz constant and bound
8 Conclusion
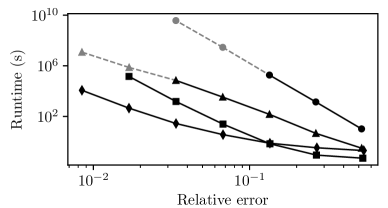
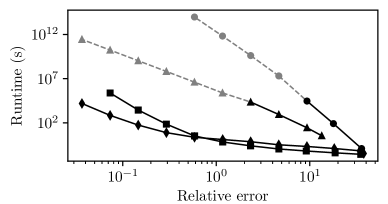
Runge-Kutta methods for computing reachable sets have seen significant advancements over the past decades, as illustrated in Figures 6 and 9. The Euler scheme with uniform discretization from [4, 9] achieved meaningful error bounds only for control systems with very small control sets or over very short time intervals. The boundary tracking algorithm with uniform discretization from [15] reduced the computational cost dramatically, but computations with decent accuracy remained a challenge.
The adaptive Euler scheme from [17] outperforms [15] at low and moderate accuracy, but underperforms it asymptotically, because it tracks full-dimensional sets. Algorithm 4 presented in this paper integrates techniques from both [15] and [17] to overcome this issue. All in all, we see in Figures 6 and 9 that the computational cost for a prescribed precision has been brought down by many orders of magnitude.
While we have proved that Algorithm 4 converges, we have not been able to prove bounds on its performance that reflect its behavior in computational experiments. For now, this remains an open problem. In addition, it would be desirable to develop boundary tracking methods and adaptive refinement techniques based on semi-implicit and fully implicit schemes, which are better suited for stiff systems.
Acknowledgement
This work has partly been supported by an Australian Government Research Training Program (RTP) Scholarship.
References
- [1] M. Althoff, O. Stursberg, and M. Buss. Computing reachable sets of hybrid systems using a combination of zonotopes and polytopes. Nonlinear Anal. Hybrid Syst., 4(2):233–249, 2010.
- [2] R. Baier, C. Büskens, I.A. Chahma, and M. Gerdts. Approximation of reachable sets by direct solution methods for optimal control problems. Optim. Methods Softw., 22(3):433–452, 2007.
- [3] R. Baier, M. Gerdts, and I. Xausa. Approximation of reachable sets using optimal control algorithms. Numer. Algebra Control Optim., 3(3):519–548, 2013.
- [4] W.-J. Beyn and J. Rieger. Numerical fixed grid methods for differential inclusions. Computing, 81(1):91–106, 2007.
- [5] R.M. Colombo, T. Lorenz, and N. Pogodaev. On the modeling of moving populations through set evolution equations. Discrete Contin. Dyn. Syst., 35(1):73–98, 2015.
- [6] M. Gerdts and I. Xausa. Avoidance trajectories using reachable sets and parametric sensitivity analysis. In System modeling and optimization, volume 391 of IFIP Adv. Inf. Commun. Technol., pages 491–500. Springer, Heidelberg, 2013.
- [7] A. Girard, C. Le Guernic, and O. Maler. Efficient computation of reachable sets of linear time-invariant systems with inputs. In Hybrid systems: computation and control, volume 3927 of Lecture Notes in Comput. Sci., pages 257–271. Springer, Berlin, 2006.
- [8] R. Klette and A. Rosenfeld. Digital geometry. Morgan Kaufmann Publishers, San Francisco, CA; Elsevier Science B.V., Amsterdam, 2004. Geometric methods for digital picture analysis.
- [9] V.A. Komarov and K.È. Pevchikh. A method for the approximation of attainability sets of differential inclusions with given accuracy. Zh. Vychisl. Mat. i Mat. Fiz., 31(1):153–157, 1991.
- [10] A.B. Kurzhanski and P Varaiya. Ellipsoidal techniques for reachability analysis. In Hybrid Systems: Computation and Control, pages 202–214, Berlin, Heidelberg, 2000. Springer Berlin Heidelberg.
- [11] C. Le Guernic and A. Girard. Reachability analysis of linear systems using support functions. Nonlinear Analysis: Hybrid Systems, 4(2):250–262, 2010. IFAC World Congress 2008.
- [12] J.R. Munkres. Topology. Prentice Hall, Inc., Upper Saddle River, NJ, second edition, 2000.
- [13] F. Parise, M.E. Valcher, and J. Lygeros. Computing the projected reachable set of stochastic biochemical reaction networks modeled by switched affine systems. IEEE Trans. Automat. Control, 63(11):3719–3734, 2018.
- [14] W. Riedl, R. Baier, and M. Gerdts. Optimization-based subdivision algorithm for reachable sets. J. Comput. Dyn., 8(1):99–130, 2021.
- [15] J. Rieger. Robust boundary tracking for reachable sets of nonlinear differential inclusions. Found. Comput. Math., 15(5):1129–1150, 2015.
- [16] J. Rieger and K. Wawryk. Restriction and interpolation operators for digital images and their boundaries. arXiv, 2024, arXiv:2407.18511.
- [17] J. Rieger and K. Wawryk. Towards optimal space-time discretization for reachable sets of nonlinear control systems. J. Comput. Dyn., 11(2):153–173, 2024.
- [18] M. Rungger and M. Zamani. Accurate reachability analysis of uncertain nonlinear systems. In Proceedings of the 21st international conference on hybrid systems: Computation and control (part of CPS week), pages 61–70, 2018.
- [19] M. Serry and G. Reissig. Overapproximating reachable tubes of linear time-varying systems. IEEE Trans. Automat. Control, 67(1):443–450, 2022.
- [20] V. Veliov. Second order discrete approximations to strongly convex differential inclusions. Systems Control Lett., 13(3):263–269, 1989.
- [21] V. Veliov. On the time-discretization of control systems. SIAM J. Control Optim., 35(5), 1997.