Ellipsoidal superpotentials and singular curve counts
Abstract.
Given a closed symplectic manifold, we construct invariants which count (a) closed rational pseudoholomorphic curves with prescribed cusp singularities and (b) punctured rational pseudoholomorphic curves with ellipsoidal negative ends. We prove an explicit equivalence between these two frameworks, which in particular gives a new geometric interpretation of various counts in symplectic field theory. We show that these invariants encode important information about singular symplectic curves and stable symplectic embedding obstructions. We also prove a correspondence theorem between rigid unicuspidal curves and perfect exceptional classes, which we illustrate by classifying rigid unicuspidal (symplectic or algebraic) curves in the first Hirzebruch surface.
1. Introduction
1.1. Motivation
In algebraic and symplectic geometry one often considers curves which satisfy various types of geometric constraints. For instance, Gromov–Witten invariants count curves passing through one or more cycles representing chosen homology classes, and relative Gromov–Witten invariants further specify tangency conditions with a chosen divisor. For certain applications, a distinguished role is played by constraints which are local near points, as these make no assumption on the ambient topology. For example, curves with several generic point constraints are the subjects of the celebrated formulas of Kontsevich [KM, KV] and Caporaso–Harris [CH], and they form the basis of the -map in embedded contact homology used to define the ECH capacities [Hut1].
More recently, curves with local tangency constraints have been used to put various obstructions on Lagrangain submanifolds and symplectic embeddings – see e.g. [CM1, CM2, Ton, MS3, MS5]. The local tangency constraint can be formulated in terms of a generic local divisor and it essentially amounts to specifying the -jet of a curve at a marked point, for some . In particular, for this reduces to an ordinary point constraint.
In this paper we introduce a family of local geometric constraints which naturally generalize local tangency constraints and are related to singularities of algebraic curves. The resulting curve counts can be interpreted in several ways:
-
(a)
as closed curves satisfying local multidirectional tangency constraints
-
(b)
as closed curves with prescribed cusp singularities
-
(c)
as punctured curves which are negatively asymptotic (in the sense of symplectic field theory) to Reeb orbits in ellipsoids
-
(d)
as relative Gromov–Witten invariants with respect to certain nongeneric chains of divisors.
Interpretation (a) leads to a natural definition of these counts in the spirit of symplectic Gromov–Witten theory, while (b) will relate these to classical existence problems about singular algebraic curves, particularly those with one cusp singularity (this is locally modeled on ). Interpretation (c) embeds these counts into the framework of SFT and will allow us to use them to obstruct (stabilized) symplectic embeddings of ellipsoids. Finally, (d) is related most directly to (b) via embedded resolution of curve singularities.
The main goals of this paper are:
-
•
to give rigorous self-contained definitions of these counts (under suitable assumptions)
-
•
to formalize the above interpretations (a)-(d) into precise equivalences between invariants
-
•
to discuss applications to symplectic embeddings and classifying singular (algebraic or symplectic) curves.
We will restrict to genus zero and primarily focus on constraints of an essentially (real) four-dimensional nature, although we allow target spaces of any dimension. For the remainder of this introduction we outline our main results in more detail.
1.2. Ellipsoidal superpotentials
We begin by discussing punctured curves with ellipsoidal negative ends. Symplectic field theory packages punctured curve counts in symplectizations and completed symplectic cobordisms into algebraic invariants which are known to provide powerful symplectic embedding obstructions. Of particular importance for this paper are cobordisms of the form , given by excising from a closed symplectic manifold a (rescaling of) the ellipsoid with area factors (see §2). Given a homology class , we denote by the SFT count of index zero planes in the symplectic completion of with one negative end asymptotic to a Reeb orbit in . In [MS6] this count is called the ellipsoidal superpotential.
In general is a virtual count of pseudoholomorphic buildings in a compactified moduli space and takes values in . However, we will show that in favorable situations the count can be defined by classical pseudoholomorphic curve techniques and takes values in . In order to give a precise formulation let us first introduce some relevant notation. For rationally independent111That is, are linearly independent over . We will frequently make this assumption out of convenience in order to ensure nondegenerate Reeb dynamics in ., let denote the Reeb orbits in in order of increasing action. In particular, the action of is given by , where denotes the th smallest positive integer multiple of one of .222In general will denote the action of a Reeb orbit , and we use the notation when we wish to emphasize its combinatorial nature in the case of ellipsoids. Recall that each Reeb orbit in is an iterate of one of the simple orbits , where denotes the intersection of with the th complex axis. We will denote the covering multiplicity of any Reeb orbit by .
Let denote the set of SFT admissible almost complex structures on (see §2.2). Given , let denote the moduli space of -holomorphic planes333These need not be embedded. which lie in the homology class and are negatively asymptotic to . Here denotes the first Chern number of , and is precisely the negative asymptotic Reeb orbit needed for this moduli space to have index zero.
The following theorem gives precise conditions under which the ellipsoidal superpotential is classically defined and integer-valued, in which case we get obstructions for stabilized symplectic embeddings of ellipsoids.
Theorem A (specialization of Theorem 2.3.5 and Corollary 2.7.2).
Let be a semipositive closed symplectic manifold, a homology class, and a rationally independent tuple satisfying Assumption (*), and such that and have no common divisibility.444That is, there is no such that is a -fold cover of another Reeb orbit and we have for some . This holds for example if and are relatively prime. Then:
-
(a)
For generic , the moduli space is finite and regular, and its signed count is independent of the choice of generic .
-
(b)
Suppose that this count is nonzero, and further that is semipositive for some . Then given any symplectic embedding we must have .
Here denotes the area of with respect to the symplectic form on . Assumption (*) is our key numerical condition on and , formulated in §2.3:
Assumption (*) (Assumptions A and B).
Assume that for any and satisfying we have
with strict inequality if .
Notation 1.2.1.
Special cases of Theorem A in the case have appeared in e.g. [HK, CGH, McD2, CGHM]. Theorem A is applied in [MS4] to the monotone toric surfaces from [CGHMP], and in [MMW] to one point blowups of . For the stabilized embedding obstructions in (b) it is essential that we count planes, as curves with higher genus or several negative ends do not typically behave well under stabilization (see §2.6). Note that is semipositive e.g. whenever is monotone or and .
While Assumption (*) is somewhat mysterious in general, we have the following important specialization for which Assumption (*) always holds (see §2.3). Fix with relatively prime satisfying , and put with and sufficiently small. In this case the Reeb orbit is either or , and in either case its action is approximately . In dimension four Assumption (*) is closely related to the ECH partition conditions – see Remark 2.3.4.
Remark 1.2.2.
Remark 1.2.3 (on the assumptions in Theorem A).
Semipositivity is a standard assumption in symplectic Gromov–Witten theory which is needed to rule out multiple covers of negative index – see [MS1] and §2.3 below. The non-divisibility assumption on and is also needed is rule out multiple covers in the moduli space .
It is tempting to relax the Assumption (*) in Theorem A, but this likely requires a more sophisticated transversality setup (and results in values in rather than ), due to the possibility of branched covers of trivial cylinders in with nonpositive index (see Remark 2.4.3). In fact, [MS6, §7] gives examples where cannot be an integer, e.g. . Similar considerations will apply to Theorem B below.
1.3. Multidirectional tangency constraints
We next discuss closed curve counts with local multidirectional tangency constraints, denoted by . Roughly speaking, for this constraint requires curves to pass through a specified point in with contact order to the th complex direction. The most relevant case for us will be when , i.e. we only impose constraints in the first two complex directions. For simplicity we restrict to curves carrying a single multidirectional tangency constraint, although this could be readily generalized to multiple constraints.
Given a symplectic manifold , we will say that a collection of smooth local symplectic divisors through a point is spanning if their tangent spaces at span . For example, the complex hyperplanes give a set of spanning local divisors through . We denote by the space of all tame almost complex structures on which are integrable near and preserve each of .
Given , we define to be the moduli space of -holomorphic maps such that , , and has contact order at least with at for .
Theorem B (specialization of Theorem 3.3.2).
Let be a semipositive closed symplectic manifold, a homology class, a collection of spanning local divisors at a point , and a tuple such that and . Then for generic , the moduli space is finite and regular, and its signed count is independent of the choices of , and generic .
Notation 1.3.1.
Remark 1.3.2.
In the special case , the constraint reduces to the local tangency constraint denoted by in [MS3].
Remark 1.3.3.
Suppose , and we have and . As we make precise in §3.5, the local multidirectional tangency constraint is akin to prescribing a cusp at along with its maximal jet. In particular, for generic , every curve has a cusp singularity. Conversely, if is a -holomorphic curve with a cusp at , then we can find spanning local divisors at such that the constraint is satisfied. Incidentally, the choice of is irrelevant if we assume .
Example 1.3.4.
The constraint corresponds to having an ordinary cusp at a specified point and with specified tangent line. Recall that there is indeed a well-defined tangent line at an ordinary cusp even though it is a singular point.
Let us briefly comment on the proof of Theorem B. Generalizing [MS3, Prop. 2.2.2] for local tangency constraints, the basic strategy is to show that any bad degenerations (i.e. multiple covers or stable maps with more than one component) only appear in real codimension at least two. In the case of local tangency constraints, the main difficulty comes from configurations involving ghost bubbles (i.e. the constraint is carried by a constant component), and these are handled by observing (via [CM1, Lem. 7.2]) that the nearby nonconstant components satisfy tangency constraints which “remember” the main constraint. In the case of local multidirectional tangency constraints this approach apparently fails to produce enough codimension, but we show in §3.2 that such ghost degenerations carry additional “hidden constraints”:
Proposition C (specialization of Proposition 3.2.4).
Suppose that a curve carrying the constraint degenerates into curves carrying constraints respectively. Then we must have
| (1.3.1) |
for any choice of .
1.4. Correspondence theorem
We now formulate a precise relationship between negative ellipsoidal ends and multidirectional tangency constraints. Recall that has a negative end modeled on , and that a curve has a negative end asymptotic to the Reeb orbit in (a rescaling of) . We can view the image of a small loop around the puncture as an embedded loop in which has a well-defined linking number with the -sphere for . Using results from [MS6, §4], for a careful choice of we can directly transform into a -holomorphic sphere in satisfying the constraint for suitable .
Furthermore, the linking numbers associated to the puncture of are generically given by , which is defined combinatorially as follows.
Definition 1.4.1.
For rationally independent and , let denote the tuple which maximizes subject to .
Example 1.4.2.
For , we have
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | |
|---|---|---|---|---|---|---|---|---|
| (1,1) | (2,1) | (2,2) | (3,2) | (4,2) | (4,3) | (5,3) | (5,4) |
.
The lattice path in will play a central role in relating negative ellipsoidal ends with multidirectional tangencies. It is the natural analogue of the lattice path from [MS6, §1.1] which instead relates to positive ends (in fact we have ).
Note that for we have for some . In this case it is easy to check that is either or , depending on whether or is smaller.
Theorem D (specialization of Theorem 3.4.1).
Let be a semipositive symplectic manifold, a homology class, and a rationally independent tuple with . Put , and assume that . Then we have .
Remark 1.4.3.
1.5. Singular symplectic and algebraic curves
It is important to understand when is nonzero, as by Theorem A this obstructs symplectic embeddings of the form . In fact, for , all such obstructions known to us are of this form, and at least in the case it is expected that these provide a complete set of obstructions. The recent paper [MS6] provides tools to compute (and hence also ) by purely combinatorial methods, but many mysteries remain.
Using Theorem D, we recast this problem in §3.5 in much more geometric terms, opening new avenues to prove nonvanishing results. A -sesquicuspidal symplectic curve in a symplectic four-manifold is a subset which has one singularity modeled on the cusp, and which is otherwise a positively immersed symplectic submanifold (see Definition 3.5.1). One can show using the adjunction formula that the number of double points must be . In §3.5 we prove:
Theorem E.
Fix a four-dimensional closed symplectic manifold, a homology class, and with and . Then we have , with if and only if there exists a rational -sesquicuspidal symplectic curve in lying in homology class .
Since any singularity of an algebraic curve can be symplectically perturbed into a finite set of positive double points, we have:
Corollary F.
If is a smooth projective surface containing an index zero irreducible rational algebraic curve in homology class with a cusp (and possibly other singularities), then we have .
This allows us to study (or equivalently ) by constructing algebraic curves and potentially importing techniques from algebraic geometry. As an illustration, Orevkov [Ore] constructed an infinite sequence of index zero unicuspidal rational algebraic curves in , so by Corollary F there is a corresponding infinite sequence of nonvanishing values for , and these turn out to give precisely the symplectic embedding obstructions at the outer corners of the Fibonacci staircase [MS2] via Theorem A(b). In the forthcoming work [MS4] we generalize Orevkov’s construction in two independent directions, by constructing new families of index zero rational sesquicuspidal algebraic plane curves and by replacing with various other toric surfaces.
1.6. Unicuspidal curves and perfect exceptional classes
Lastly, we discuss applications to existence questions for singular curves. While the previous subsection highlights the relevance of index zero sesquicuspidal curves in symplectic four-manifolds, we focus here on the special case of curves which are unicuspidal curves, i.e. having a cusp and no other singularities.
According to [FdBLMHN], the aforementioned curves constructed by Orevkov are the only index zero unicuspidal rational algebraic plane curves. Before generalizing this result we must recall a bit more terminology. Firstly, given with and , let denote the corresponding weight sequence. As we recall in §4.1, this is related to the continued fraction expansion of and controls (among other things) the resolution of the cusp singularity.
Given a closed symplectic four-manifold , a homology class is exceptional if we have , , and is represented by a symplectically embedded two-sphere. We will say that is -perfect exceptional if is an exceptional class, where . Here is the -point blowup of , and we have the identification , where are exceptional classes.
In §4.4 we prove:
Theorem G.
Fix a a symplectic four-manifold and a homology class. There is an index zero rational -unicuspidal symplectic curve in in homology class if and only if is -perfect exceptional. Moreover, in this case we have .
As an illustration of Theorem G, we note that the perfect exceptional homology classes in the first Hirzebruch surface were studied comprehensively in [MMW] as part of their study of infinite staircases in the symplectic ellipsoid embedding functions of one-point blowups of . Put , where is the line class and is the exceptional divisor class. Let be the sequence defined by the recursion with initial values , and put
-
•
-
•
-
•
for .
Corollary H.
There is an index zero -unicuspidal rational symplectic curve in in homology class and satisfying if and only if for some .
In fact, the constructions in [MS4] show that each of these is realized by an algebraic curve. This could be viewed as a version of symplectic isotopy problem for singular symplectic curves in the spirit of [GS].
Corollary H should be compared with (the index zero part of) [FdBLMHN, Thm 1.1], but with replaced by . The case (sans algebraicity) can also be deduced from the results in [MMW], but it is considerably more complicated; we discuss this briefly in §4.5.
Acknowledgements
K.S. benefited from many helpful discussions with Grisha Mikhalkin.
2. Ellipsoidal superpotentials
The main technical result in this section is Theorem 2.3.5, which establishes conditions under which the ellipsoidal superpotential is robust (see Definition 2.3.1), which roughly means well-defined by classical transversality techniques and independent of any auxiliary choices. Together with Corollary 2.7.2, this implies Theorem A.
After some setting up some geometric preliminaries in §2.1 and §2.2, we state our main result and some of its consequences in §2.3. In §2.4 we give the proof of Theorem 2.3.5 assuming several lemmas about curves and their branched covers, which are proved in §2.5. In §2.6 we give criteria under which moduli spaces are stabilization invariant. Finally, in §2.7, we illustrate how (stable) symplectic embedding obstructions are naturally seen from this framework.
2.1. Symplectic embeddings of small ellipsoids
Let be a closed symplectic manifold, and let be the symplectic ellipsoid with area factors . For sufficiently small, there exists a symplectic embedding of the scaled ellipsoid into . In fact, up to further shrinking , this embedding is unique up to Hamiltonian isotopy:
Lemma 2.1.1.
Let be symplectic embeddings. Then for any sufficiently small there is a smooth family of symplectic embeddings such that for .
Proof.
After post-composing with a Hamiltonian isotopy of which sends to , we can assume . We can then find sufficiently small so that the images of both and lie in a Darboux ball in centered at . We thereby view as symplectic embeddings , where is a -dimensional ball of some radius centered at the origin. After further shrinking , we can assume that also contains the standard . It suffices to find a family of symplectic embeddings interpolating between and .
By the “extension after restriction” principle (see e.g. [Sch, §4.4]), extends to a Hamiltonian diffeomorphism of . In particular, there is a Hamiltonian isotopy with such that . Note that has image in for , but not necessarily for all . However, an inspection of the construction of the Hamiltonian isotopy via the Alexander trick as (c.f. the explanation in [Sch, §4.4]) shows that we can further assume for all . Therefore, after further shrinking , we can arrange that has image in for all . By concatening this family with (the time reversal of) the analogous one given by applying the same considerations to , this concludes the proof. ∎
Remark 2.1.2.
The proof above actually applies equally if we replace the ellipsoid with any star-shaped domain in .
Remark 2.1.3.
Since , given any family of symplectic embeddings there is a Hamiltonian isotopy such that and . In particular, there is a symplectomorphism between and . Here denotes the open ellipsoid .
2.2. Moduli spaces of punctured curves
Here we briefly discuss some geometric preliminaries and relevant notions about pseudoholomorphic curves, taking the occasion to set notation and terminology.
2.2.1. Spaces with negative ellipsoidal ends
Fix a closed symplectic manifold , a homology class , and a vector whose components are rationally independent.
Notation 2.2.1.
We put , where is a symplectic embedding for some .
Such an embedding always exists for sufficiently small, e.g. with image contained in a Darboux chart. We denote the symplectic completion of by
2.2.2. Almost complex structures
Given a contact manifold (typically ), we denote by the space of admissible almost complex structures on the symplectization (see e.g. [MS5, §2.1.2]). In particular, any is invariant under translations in the first factor of .
Similarly, given a compact symplectic cobordism with positive contact boundary and negative contact boundary , we denote by the space of admissible almost complex structures on the symplectic completion of . It will be more convenient to require to be only tame rather than compatible on the compact part , which suffices for all of our purposes.
Our main example is , which has empty positive boundary and negative boundary for some small . By definition is an almost complex structure on which is tame on the compact piece and whose restriction to the negative end agrees with the restriction of some admissible almost complex structure on .
2.2.3. Moduli spaces
Given a collection of Reeb orbits in and an almost complex structure , we denote by the moduli space of -holomorphic maps from a -punctured Riemann sphere to , such that is asymptotic at the th puncture to for . Here the conformal structure on the domain (or equivalently the locations of the punctures) is arbitrary, and elements of (usually referred to as simply “curves”) are taken modulo biholomorphic reparametrization.
Since , any curve can be uniquely filled so as to give a well-defined homology class . Given , we put We will sometimes suppress the almost complex structure from the notation and write simply when the choice of is implicit or immaterial. We write when consists of a single Reeb orbit .
Similarly, given collections of Reeb orbits and in and an almost complex structure , we denote by the moduli space of maps from a Riemann sphere having positive punctures and negative punctures to the symplectization , such that is asymptotic to the respective orbits at the positive punctures and to at the negative punctures. Since is translation invariant, this moduli space inherits an action which translates in the first factor of the target space, and we denote the quotient space by .
2.2.4. Index formulas
Given a homology class and Reeb orbits in , recall that the expected dimension of the moduli space is given by
Here is the first Chern number of , and is the Conley–Zehnder index of with respect to the (unique up to homotopy) global trivialization of the contact hyperplane distribution over . In particular, for the Reeb orbit in we have (see e.g. equation (2.3.1) below and [GH, §2.1]). As usual we put .
By definition the ellipsoidal superpotential counts planes, i.e. , and we have if and only if , i.e. . Standard transversality results (see e.g. [Wen2, §8]) show that for generic the moduli space is smooth and of the expected dimension near any simple curve .
Similarly, given Reeb orbits and , the index of the moduli space is given by
Standard transversality results show that, for generic , the moduli space is smooth and of the expected dimension near any simple curve which is not a trivial cylinder.
We will also need to consider transversality in generic one-parameter families. Given a one-parameter family of almost complex structures , we consider the associated the parametrized moduli space
If the family is generic, this is a smooth manifold of dimension near any simple curve (i.e. a pair with simple). Given a one-parameter family , we define the parametrized moduli space in a similar manner. We denote the quotient by target translations by . For a generic one-parameter family , this is a smooth manifold of dimension near any simple curve.
2.2.5. Formal curves
Following the usage in [MS5], the language of formal curves provides a convenient bookkeeping tool for making index arguments. The basic idea is that, for certain combinatorial purposes, we can formally glue together several curve components in a pseudoholomorphic building in order to treat them at a single formal curve. In such contexts, it is usually irrelevant whether or not an actual analytic gluing exists.
Here we give definitions specialized to the situations most relevant for us.
Definition 2.2.2.
A genus zero formal curve component in is a pair , where
-
•
is a tuple of Reeb orbits in
-
•
is a homology class
-
•
we require the energy
to be nonnegative.
Recall that denotes the action of , and for the Reeb orbit in we have , where is the th smallest element of the multiset , or equivalently
(see [GH, §1.2]). The index of is defined to be
| (2.2.1) |
with calculated as in (2.3.1).
Definition 2.2.3.
Similarly, a genus zero formal curve component in is a pair , where
-
•
and are tuples of Reeb orbits in
-
•
we require the energy
(2.2.2) to be nonnegative.
The index of is given by
| (2.2.3) |
A formal cylinder in is a formal curve with one positive end and one negative end (i.e. ), and it is trivial if .
2.3. Main robustness result
We now discuss notions of robustness for moduli spaces. In the following, is a closed symplectic manifold, is a homology class, is a rationally independent tuple, and we put , which implicitly depends on a choice of and .
Definition 2.3.1.
We will say that is robust if is finite and regular for any choice of , and generic , and moreover the (signed) count is independent of these choices.
We will say that is strongly robust if it is robust and moreover we have for any choice of , and generic .
Here denotes the SFT compactification of via pseudoholomorphic buildings à la [BEH+]. Note that implies that is already compact, and hence finite if it is regular with index zero. If is robust, we will write to refer to the (signed) count for any choice of generic . We will say that a robust moduli space is deformation invariant if it remains robust under deformations of the symplectic form on , and moreover the count is unchanged under such deformations.
Remark 2.3.2.
Although robust moduli spaces are already well-suited for enumerative purposes, the added benefit of strong robustness is that it guarantees that the counts agree with their SFT counterparts, which a priori depend on the full SFT compactification (c.f. [MS5, §3.4]). Strong robustness is also closely related to the notion of “formal perturbation invariance” utilized in [MS5], but due to some technical differences in the setup we use a different term here to avoid confusion.
Recall that a closed symplectic manifold is semipositive if any with positive symplectic area and satisfies (this is automatic if ). The upshot is that, for generic , all -holomorphic spheres have . Indeed, by standard transversality the underlying simple curve must have , and hence by semipositivity, whence .
Before stating our main result on robust moduli spaces, we will need to make some numerical assumptions on the data and .
Assumption A.
We have
for any with satisfying .
Assumption B.
We have
for any with satisfying .
Assumption C.
The homology class and Reeb orbit have no common divisibility.
Remark 2.3.3.
Assumption A equivalently states that any index zero (rational) formal curve in with one negative end must have nonpositive energy, provided that . Incidentally, a formal curve with nonpositive energy necessarily has zero energy since by definition formal curves cannot have negative energy. Assumption B equivalently states that there are no nontrivial index zero (rational) formal curves in with one negative end . Note that for rationally independent a formal curve with one negative end can only have zero energy if all Reeb orbits involved are covers of the same underlying simple orbit.
Remark 2.3.4.
We can now state our main robustness result:
Theorem 2.3.5.
Recall that we put .
Although we do not a priori have a uniform way to verify Assumptions A and B in general, the next two lemmas give useful sufficient conditions.
Lemma 2.3.6.
If , then Assumption A holds.
Lemma 2.3.7.
Note that Assumptions A,B,C depend only on up to scalar multiplication, i.e. if they hold for then they also hold for for any .
Deferring the proofs of these lemmas for the moment, let us consider the four-dimensional case , or more generally . In this situation it is customary to take without loss of generality with , and we refer to as the “short orbit” and as the “long orbit” . In the following, for with and we put and for arbitrarily small. We will sometimes write in place of , and in place of , and so on. In particular, assuming , note that if then we have , while if then we have . We thus have:
Corollary 2.3.8.
Let be a closed symplectic four-manifold, and let be a homology class such that for some relatively prime.
-
(1)
For , the moduli space is strongly robust.
-
(2)
For , the moduli space is strongly robust.
In either case, the signed count is a nonnegative integer.
More generally, the same is true if is any semipositive closed symplectic manifold and we replace with for with .
The last sentence of the first paragraph is a standard consequence of automatic transversality as in [Wen1] – see [MS5, §5.2].
Remark 2.3.9.
If we put , has a two-parameter family of Reeb orbits which becomes the two orbits after slightly perturbing , and the moduli spaces described in cases (1) and (2) of Corollary 2.3.8 can be viewed as two different ways of Morsifying this family.
We note that the above discussion gives sufficient but not necessary conditions for Assumptions A and B to hold, as the following simple example illustrates.
Example 2.3.10.
Proof of Lemma 2.3.6.
Fix satisfying . Considering the contrapositive of Assumption A, it suffices to show that any formal curve in with strictly positive energy and with positive ends and negative end must satisfy .
Note that for any , the Reeb orbit is a multiple of either or . Suppose that we have for some . Then we have
and hence
| (2.3.1) | ||||
i.e. are too large to contribute to the Conley–Zehnder index of . Similarly, if for some then we have
It follows that for index purposes we can assume , and since we are assuming we then have by Lemma 2.3.11 below. ∎
Lemma 2.3.11.
Fix rationally independent, and let be a (rational) formal curve in . Then we have , and in fact unless .
Proof.
Up to permutation we can write the positive asymptotics of as and the negative asymptotics as . We then have
| (2.3.2) |
Slightly rearranging the terms in the index formula, we have
By 2.3.2, each of the terms in parentheses must be nonnegative, and at least one of them must be strictly positive (and hence at least by integrality) since is irrational. If is strictly positive then both of the terms in parentheses must be strictly positive.
∎
Proof of Lemma 2.3.7.
To verify Assumption A, by Lemma 2.3.6 it suffices to establish . Note that for sufficiently small we have and .
We will verify Assumption B in the case , the case being nearly identical. It suffices to show that any nontrivial formal (rational) curve in with negative end and satisfies .
As in the proof of Lemma 2.3.6, it suffices to consider the case . Since and , we can assume that the positive ends of are for some with and . Then we have
Note that is not an integer for , since we have and . Therefore, for sufficiently small we have
This completes the proof. ∎
2.4. Proof modulo lemmas
In this subsection we give the proof of Theorem 2.3.5, modulo several lemmas whose proofs are deferred to §2.5. Our goal is to establish the following:
-
(I)
for any choice of , , and generic , the moduli space is regular and equal to its SFT compactification
-
(II)
the count is independent of and generic , and is invariant under deformations of the symplectic form of .
By the following claim, we can work with fixed throughout the argument.
Claim 2.4.1.
Independence of of the choice of and follows from independence of the choice of generic .
Proof.
For , consider symplectic embeddings for some , along with generic . By Lemma 2.1.1, we can find sufficiently small such that the restrictions and are isotopic through symplectic embeddings. Note that, for , the symplectic completions of and are naturally identified such that we have an inclusion . Moreover, as in Remark 2.1.3, there is a symplectomorphism , and this sets up a bijection between and . Under these identifications, we can thus view as two generic almost complex structures on the symplectic completion of a fixed symplectic manifold . ∎
Now fix a generic one-parameter family of almost complex structures
and let
be the induced family given by restricting each to the negative end. Here we could also allow a one-parameter family of symplectic forms on , but to keep the exposition simpler we will assume the symplectic form on is fixed.
Proof of Theorem 2.3.5.
By Assumption C, every curve in the parametrized moduli space is necessarily simple. Therefore by genericity of the family we can assume that the moduli space is regular and hence a smooth -dimensional manifold. Similarly, is regular for .
Now consider the SFT compactification
To prove Theorem 2.3.5, it will suffice to show that , which implies that is already compact. In particular, this implies that is equal to its SFT compactification for , which confirms (I). Then is a smooth -dimensional compact cobordism between finite zero-dimensional manifolds and , which confirms (II).
A priori, an element of is a stable pseudoholomorphic building consisting of, for some ,
-
•
a level in consisting of one or more -holomorphic curve components whose total homology class is
-
•
some number (possibly zero) of symplectization levels , each consisting of one or more -holomorphic curve components, not all of which are trivial cylinders.
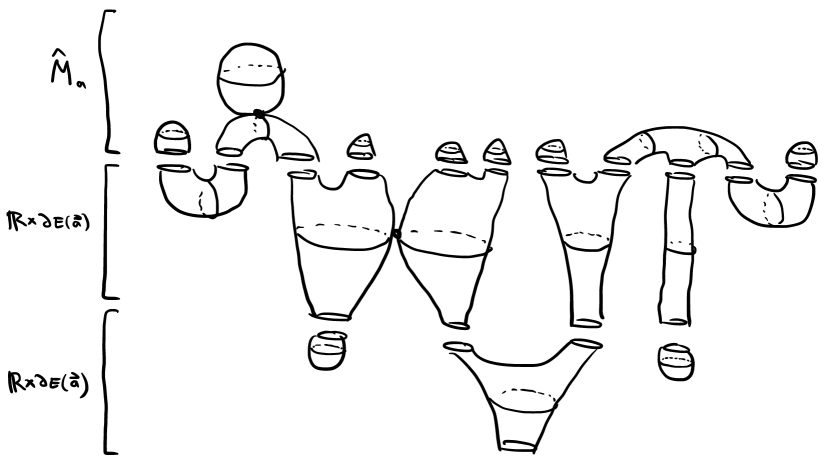
Our goal is to show that in fact there cannot be any symplectization levels, and that the level in has a single component. See Figure 1 for a cartoon.
After formally gluing various pairs of curve components in adjacent levels along shared Reeb orbits, we arrive at the following picture:
-
•
a formal curve component in with positive ends and a single negative end , for some
-
•
formal planes in
-
•
formal spheres in , for some .
Here the positive ends of match up with the respective negative ends of . Note that each of is composed of some number of curve components of .
Condition (a).
Let be part of a generic one-parameter family. Let be a genus zero -holomorphic curve component in with negative ends, all but one of which bounds a formal plane in . Assume also that we have . Then, denoting the formal planes by , we have
with equality only if .
Condition (b).
Let be a genus zero formal curve in with one negative end . Then we have , with equality only if .
Condition (c).
Let be a genus zero formal curve in with one negative end , and suppose that and . Then is a trivial cylinder.
We also have the following elementary lemma, whose proof is deferred to the next subsection:
Lemma 2.4.2.
Let be part of a generic one-parameter family, and let be a genus zero -holomorphic curve component in . Then we have , and in fact if has any negative ends.
Taking these for granted for the moment, we complete the proof of Theorem 2.3.5 as follows.
For , we claim that , with unless is composed of a single -holomorphic plane in . To see this, note that a priori is composed of some number of -holomorphic curve components in and some number of -holomorphic curve components in . If , then we can view as a -holomorphic curve component in such that all but one of its ends bounds a formal plane in , whence the claim follows directly by Condition (a). A similar argument holds in the case , noting that by Lemma 2.4.2 any extra components in will only push up the total index of .
Now let denote the sub-building of given by throwing away all components corresponding to . Since by Lemma 2.4.2, the total index of all curve components satisfies
Since by (b) and by the above discussion, we must have , and hence
-
•
-
•
is a -holomorphic plane in for .
Moreover, by Condition (c) must be a trivial formal cylinder, and in particular . It also follows that the total index of is zero, and hence , so by Lemma 2.4.2 each is actually a -holomorphic sphere in .
In principle could be composed of several -holomorphic curve components in which formally glue together to give a cylinder. However, since the total energy must be zero, can only consist of trivial cylinders over . This contradicts stability of the pseudoholomorphic building .
It remains that does not have any symplectization levels, and consists of a -holomorphic plane and -holomorphic spheres . By a standard argument using semipositivity, we must have , which completes the proof. Indeed, letting denote the underlying simple curve of for , we have
so by genericity of and standard tranversality techniques and cannot intersect for codimension reasons. ∎
2.5. Proof of lemmas
In this subsection we now prove that Assumptions A and B imply Conditions (a),(b),(c), and we also give the proof of Lemma 2.4.2.
Proof.
Let be the negative end of which does not bound a formal plane, and put . Our goal is to establish
| (2.5.1) |
with equality only if has precisely one negative end. Note that the left hand side of (2.5.1) can be viewed as the index of after capping off all of its other negative ends by formal planes.
Let be the covering index of over its underlying simple curve , with , and let denote the negative end of which is covered by . Since is simple, by the genericity assumption on we have and hence by parity considerations. Since all formal planes in have positive index, we have
| (2.5.2) |
where the first inequality is strict unless has precisely one negative end (i.e. ). We will assume , since otherwise and we are done.
We can therefore apply Assumption A in the case and to get
Since is at most a -fold cover of , we also have
| (2.5.3) |
with the first inequality strict unless is precisely a -fold cover of and the second inequality strict unless . Note that is equivalent to .
Finally, note that (2.5.1) is equivalent to , i.e. . This holds by the above, with strictly inequality only if and is a -fold cover of , in which case also has precisely one negative end. ∎
Proof.
Since has positive ends and negative end , we have
| (2.5.4) |
If , then by Assumption A we have , and hence since the energy must be nonnegative.
Otherwise, suppose by contradiction that we have . Then , so by Assumption A we have
and hence , which is impossible. ∎
Proof.
Proof of Lemma 2.4.2.
Since the first Chern number is multiplicative under taking covers, we can assume that is simple. Let denote the number of negative ends of , and let denote its asymptotic Reeb orbits. By genericity we have , and hence since the index
is necessarily even. If is a closed curve, i.e. , then we have , and hence by semipositivity. Otherwise, we have and
∎
2.6. Stabilization invariance I
We now discuss the effect on the ellipsoidal superpotential of stabilizing the target space, i.e. multiplying it with a given closed symplectic manifold . This will be used in the next subsection to obstruct stabilized symplectic embeddings as in Theorem A(b).
Theorem 2.6.1.
Let be a closed symplectic manifold, a homology class, and a rationally independent tuple. Let be another closed symplectic manifold and another tuple satisfying . Then we have
| (2.6.1) |
provided that the moduli spaces underlying both sides of (2.6.1) are robust and deformation invariant.
Here denotes the concatenated tuple .
In the special case of Corollary 2.3.8 we have:
Corollary 2.6.2.
Let be a closed symplectic four-manifold, and let be a homology class such that for some relatively prime. Let be another closed symplectic manifold such that is semipositive. Then for any and sufficiently small we have
Remark 2.6.3.
Note that is semipositive if e.g. and , or if is monotone and .
We naturally view any Reeb orbit in as lying also in via the inclusion . For , the Conley–Zehnder index of as an orbit of is greater than its Conley–Zehnder index as an orbit of . Using the shorthand , we have by (2.2.1) and (2.3.1) that
| (2.6.2) |
This simple observation goes back to [HK], and is the key starting point for obstructing stabilized symplectic embeddings. Here is it crucial that we count planes. Indeed, by constrast note that for with we have
If is a symplectic surface, Theorem 2.6.1 can be proved by a straightforward adaptation of the technique in [MS5, §3.6]. In brief, we can arrange that sits inside as a symplectic divisor, and we work with which preserves this divisor and restricts to some . Then we have a natural inclusion
| (2.6.3) |
In fact, any curve must be entirely contained in , since otherwise its intersection number with the divisor must be zero for homological reasons, but also positive due to positivity of intersections and winding number estimates. Furthermore, by [MS5, §A] (see also [Per]), the inclusion (2.6.3) preserves regularity, i.e. any regular curve is also regular in . Therefore we have
as desired.
This argument extends to the case of general by first deforming the symplectic form to make it integral, and then applying Donaldson’s theorem to find a full flag of smooth symplectic divisors
with for . For suitable , the above argument can be applied iteratively to show that that inclusion map (2.6.3) is again a regularity-preserving bijection, whence .
2.7. Symplectic embedding obstructions
We end this section by discussing the relationship between robust moduli spaces and (stable) symplectic embedding obstructions.
Proposition 2.7.1.
Let be a closed symplectic manifold, a homology class, and a rationally independent tuple. Assume that the moduli space is robust and we have . Then given any symplectic embedding we must have .
Proof.
Let be a symplectic embedding. By robustness of , for any generic we have
Any curve must have nonnegative energy, i.e. we have
∎
As for stable obstructions, we have:
Corollary 2.7.2.
Let be a closed symplectic manifold, a homology class, and a rationally independent tuple. Let be another closed symplectic manifold and another tuple satisfying . Assume that the moduli spaces underlying and are both robustly defined and deformation invariant, and we have . Then any symplectic embedding must satisfy .
Note that under the hypotheses of Corollary 2.7.2, any symplectic embedding of the form must also satisfy . Indeed, we can restrict to an embedding of the form , and by compactifying the target space we get a symplectic embedding , after suitably scaling up the symplectic form on . The claim then follows by applying Corollary 2.7.2 to this embedding.
3. Multidirectional tangency constraints
In this section we construct Gromov–Witten type invariants, denoted by , which count closed curves with local multidirectional tangency constraints. Here is a closed symplectic manifold, is a homology class, and is a tuple satisfying
| (3.0.1) |
(so that we expect a finite count). Theorem 3.3.2 establishes robustness of these counts under suitable assumptions, and Theorem 3.4.1 proves equivalence with the counts of the previous section. In §3.1 we import a technical tool from [MS6, §4] which will be used to relate multidirectional tangencies and ellipsoidal ends. In §3.2 we discuss “hidden constraints”, essentially showing that multidirectional tangency constraints degenerate in the same way as ellipsoidal negative ends. Using this, the proof of Theorem 3.3.2 is nearly identical mutatis mutandis to the proof of Theorem 2.3.5, after which Theorem 3.4.1 follows directly by making a special choice of almost complex structure. Finally, in §3.5 we discuss relations between multidirectional tangencies and singular curves, and in §3.6 we establish invariance under stabilization.
3.1. Multidirectional tangencies and ellipsoidal ends: local equivalence
We first discuss the local relationship between multidirectional tangency constraints and ellipsoidal negative ends. This will be used in the next subsection to compare degenerations of multidirectional tangency constraints with degenerations of ellipsoidal ends. In the following, we consider with its standard integrable almost complex structure . We take , and the standard set of spanning local divisors at given by , with for .
Notation 3.1.1 ([MS6]).
For , let denote the Reeb orbit in given by , where is the index for which is minimal.
The following proposition shows that becomes SFT admissible under a suitable diffeomorphism, and for a -holomorphic curve we can explicitly describe the resulting Reeb orbit asymptotics. Let denote the open unit disk in , and let denote the result after puncturing the origin.
Proposition 3.1.2 ([MS6, §4]).
For each rationally independent, there is an explicit diffeomorphism
such that lies in .
Moreover, suppose that is a -holomorphic map which strictly satisfies at for some , and is otherwise disjoint from . Then the -holomorphic map
is negatively asymptotic to the Reeb orbit in at the puncture .
Explicitly, we have
| (3.1.1) |
where is the coordinate on the first factor of and are coordinates on . The second statement in Proposition 3.1.2 can be seen by analyzing the asymptotics as of , with of the form .
For completeness let us elaborate on how the Reeb orbit arises in Proposition 3.1.2, refering the reader to [MS6, §4] for full details.555Here the seemingly superfluous minus sign in the notation is inherited from [MS6], where the discussion applies uniformly to both positive and negative ellipsoidal ends, whereas in this paper we only consider negative ellipsoidal ends. If is the projection, one can show that the map
is a composite , where is a diffeomorphism, is the flow , and is the unique real number such that . It turns out that if we are only interested in the asymptotics of as then we can ignore and assume that , so that depends only on the absolute values as . When we have where ; that is, as , i.e. . When the flow is a product of the flows in each factor , and the time taken to flow the circle back to is approximately for . Thus , and, if this minimum is attained for , the limiting orbit is an -fold cover of the circle .
3.2. Hidden constraints for cuspidal degenerations
The basic strategy for establishing robustness of moduli spaces will closely parallel the argument we used for in §2, i.e. we seek to show that no bad degenerations can occur for a generic one-parameter family of almost complex structures. For punctured curves in we considered the SFT compactification by pseudoholomorphic buildings, and we ultimately showed that this agrees with the uncompactified moduli space. Similarly, for closed curves in with multidirectional tangency constraints we will consider a compatification by stable maps, and seek to show that this in fact agrees with the uncompactified moduli space.
As a warmup, recall that the multidirectional tangency constraint reduces to a unidirectional tangency constraint in the case , and robustness of the moduli spaces was established in [MS3, §2] for semipositive (here ). The main subtlety in establishing robustness comes from the possibility of ghost degenerations, since strictly speaking a marked point on a constant curve component is tangent to any local divisor through its image to infinite order. This issue is resolved by observing that the nearby nonconstant curve components satisfy tangency conditions which collectively “remember” the initial constraint .
The naive extension of this argument is actually insufficient to rule out ghost degenerations for multidirectional tangency constraints, as we now explain. Fix a closed symplectic manifold , a homology class , and with . Fix also a point , a set of spanning local divisors at , and an almost complex structure .666More generally we could take a sequence converging to some , but we will suppress this to keep the notation simpler. Let be a sequence of curves which converges to some stable map . Let be the component of which carries the constraint , and suppose that is a ghost component. Let be the maximal ghost tree containing , i.e. the set of all ghost components in which are connected to through ghost components. Let (for some ) denote the nonconstant curve components of which are nodally adjacent to a curve component of , and let denote the corresponding special points of respectively. For , strictly carries a constraint for some .
Lemma 3.2.1 ([CM1, Lem. 7.2]).
In the above situation we have
| (3.2.1) |
for .
Example 3.2.2.
Suppose that consists precisely of the curve components , with . Using and the index zero assumption , we have
Even if we assume for (e.g. if each is simple and is generic), this does not immediately give any contradiction.
Example 3.2.3.
Let us further specialize the previous example by taking (i.e. the case of local tangency constraints). Since each is at least , for we have , and hence
Using , this gives
which is a contradiction at least if .
Although Lemma 3.2.1 is generally insufficient for ruling out bad degenerations, the following proposition puts stronger restrictions on degenerations of multidirectional tangency constraints.
Proposition 3.2.4.
Remark 3.2.5.
Proof of Proposition 3.2.4.
Recall that is assumed to be integrable near . Pick local complex coordinates for centered at and defined in some open neighborhood such that for . Let denote the corresponding holomorphic chart.
For , the restriction of to a small neighborhood of has image contained in , with only mapping to . By choosing a complex coordinate near we view this as a holomorphic map . Recalling the diffeomorphism from Proposition 3.1.2, we consider the -holomorphic composition
By Proposition 3.1.2, is negatively asymptotic at the puncture to the Reeb orbit in , which has action . In particular, for any we can find so that the loop given by restricting to the preimage of satisfies
Here denotes the standard contact one-form on , i.e. the restriction of the Liouville one-form on .
For sufficiently large, we can restrict the curve to the preimage of , then postcompose with , and finally restrict to the preimage of to obtain a -holomorphic map . Here is a Riemann surface with boundary circles and one interior puncture, such that for we have
where denotes the restriction of to . Since by Proposition 3.1.2 is negatively asymptotic at its interior puncture to the Reeb orbit in of action , we can find so that the loop given by restricting to satisfies
Now put . This is a Riemann surface with boundary circles mapping to and an additional boundary circle which maps to . By Stokes’ theorem and nonnegativity of energy, we have
By was arbitrarily small, this gives (3.2.2). ∎
Remark 3.2.6.
We can view Proposition 3.2.4 as saying that whenever a constraint degenerates into constraints there must exist a formal rational curve in with positive ends and negative end , for any choice of (rationally independent) . Recall that Conditions (b) and (c) put restrictions on formal curves in , and we have seen that these conditions hold e.g. under the assumptions of Lemma 2.3.7.
Another way to infer hidden constraints is via iterated blowups. Since the numerics become rather complicated we just illustrate this idea with a simple example.
Example 3.2.7.
We will show that the constraint cannot degenerate into and . More precisely, consider a sequence of curves , each of which strictly satisfies the constraint, and suppose by contradiction that these converge to a curve consisting of two irreducible components which strictly satisfy the constraints and respectively. We assume also that all of these curves are disjoint from away from the main constraints.
After blowing up at , the proper transforms all lie in homology class , where is the homology class of the exceptional divisor . After possibly passing to a subsequence, these converge to a curve which projects to , and hence consists of the proper transforms of respectively. A priori could also have some additional components which are covers of , but this is ruled out since for and hence . But this is a contradiction, since and are disjoint near .
Suppose by contradiction that is a curve in homology class which strictly satisfies , and which degenerates into curves and which strictly satisfy and . Blowing up at , the proper transform of lies in homology class , while the proper transforms of and and and lie in homology classes and respectively. Then degenerates into along with some number of copies of (covers of) . However this is not possible since and are locally disjoint.
3.3. Counting curves with multidirectional tangency constraints
As before, let be a closed symplectic manifold, a homology class, and a tuple satisfying . As usual, denotes a collection of smooth local symplectic divisors which span at a point .
Definition 3.3.1.
We will say that is robust if is finite and regular for any choice of , and generic , and moreover the (signed) count is independent of these choices.
We will say a robust moduli space is deformation invariant if it remains robust under deformations of the symplectic form on , and moreover the count is unchanged under such deformations.
Given a tuple , recall that we have the lattice path from Definition 1.4.1.
Theorem 3.3.2.
Remark 3.3.3.
Proof sketch of Theorem 3.3.2.
Given , we denote by the closure of in the compactified moduli space (i.e. the space of maps passing through ). Similarly, given a one-parameter family , we define to be the closure of in . The main task is to establish for generic .
The most interesting point is to rule out degenerations as in Example 3.2.2, i.e. with composed of a ghost component and nonconstant components which carry respective constraints . Given such a degeneration, by Proposition 3.2.4 there exists a formal curve in with positive ends and negative end , where by assumption satisfies Assumptions A and B and we have (c.f. Remark 3.2.6).
For the purposes of index calculations, we could view as curve components in , where has negative end for . On a purely formal level, note that the index of is at least that of for . The upshot is that any index lower bound for the closed curve is a fortiori true for its punctured counterpart . Also, similar to the arguments in §2.5, we can assume by genericity of and standard transversality techniques that the underlying simple curves of have nonnegative indices. But now the existence of the configuration is ruled out essentially by the argument in §2.4.
The rest of the proof also closely follows that of Theorem 2.3.5, after formally trading closed curves with multidirectional tangency constraints in for punctured curves in , and ghost trees in for formal curves in . We leave the details to the reader. ∎
3.4. Multidirectional tangencies and ellipsoidal ends: global equivalence
The following is our main result equating closed curves with multidirectional tangency constraints and punctured curves with ellipsoidal ends.
Theorem 3.4.1.
One can imagine proving Theorem D by surrounding the constraint with an ellipsoid of shape and stretching the neck. This would a detailed understanding of curves with local multidirectional tangency constraints in and their gluings. Instead, we will give a more direct correspondence by establishing an explicit bijection
for certain special choices of and .
In the following, by complex Darboux coordinates we mean local coordinates which simultaneously trivialize a symplectic form and an almost complex structure. For a Kähler manifold, such coordinates exist if and only if the Kähler metric is flat, e.g. works but not .
Proposition 3.4.3 ([MS6, §4]).
Let be a closed symplectic manifold and a tame almost complex structure such that there exist complex Darboux coordinates centered at . Then, for any given rationally independent, there exists an explicit diffeomorphism
such that lies in .
Moreover, put , with for , suppose that is a -holomorphic map which strictly satisfies at a point for some , and is otherwise disjoint from . Then the -holomorphic map
is negatively asymptotic to the Reeb orbit in at the puncture .
Here the map is given by the formula in (3.1.1) near the negative end of and is slowly deformed to the identity away from this end.
We now complete the proof of Theorem 3.4.1.
Proof of Theorem 3.4.1.
Pick as in Proposition 3.4.3, which we can assume is generic away from . Then Proposition 3.4.3 sets up a bijection
| (3.4.1) |
where the union is over all satisfying . By definition, is the unique tuple which minimizes subject to . It follows from (3.0.1) that for any other satisfying we have
and hence by our genericity assumption on . It follows that (3.4.1) is in fact a bijection
and hence we have
∎
3.5. Cusps, multidirectional tangencies, and singular symplectic curves
We now elaborate on the relationship between cusp singularities and multidirectional tangency constraints. Let be an algebraic curve. A singular point is a cusp if its link is the torus knot, i.e. if for sufficiently small there is a diffeomorphism
where denotes the sphere of radius centered at . More generally, any singularity of an algebraic curve in has a link which is an iterated torus link (see [EN]).
The singular curves most relevant to the ellipsoidal superpotential are those having one main singularity which is a cusp, and possibly some additional singularities which are ordinary double points (i.e. modeled on ).
Definition 3.5.1.
Given a symplectic four-manifold and with , a -sesquicuspidal symplectic curve is a subset such that
-
•
there is a point with an open neighborhood such that is symplectomorphic to , where is an algebraic curve in having a cusp at and is an open neighborhood of
-
•
is a positively immersed symplectic submanifold of .
Remark 3.5.2.
Every sesquicuspidal curve is in particular a singular symplectic curve in the sense of [GS, Def. 2.5].
Lemma 3.5.3.
Let be an irreducible local algebraic curve near a point , and fix relatively prime.
-
(a)
Suppose that strictly satisfies the constraint for some smooth local holomorphic divisors which span at . Then has a cusp at .
-
(b)
Conversely, suppose that has a cusp at . Then we can find a smooth local divisors intersecting transversely at so that strictly satisfies the constraint .
Remark 3.5.4.
If has a cusp at , then the multiplicity of at is , i.e. we have for any divisor passing through . If say and we have , then we have for any choice of smooth local divisor which intersects transversely at . In other words, the choice of is essentially irrelevant.
Proof.
To prove (a), let be complex coordinates for centered at the origin such that and . Recall that has a Newton–Puiseux parametrization of the form
where
-
•
for
-
•
the Puiseux pairs are relatively prime for all
-
•
there exists such that for all
-
•
we have increasing exponents
(here we follow the conventions of [Neu]). The link of at is then an iterated torus knot, with cabling parameters determined by and for . This gives a parametrization of of the form
| (3.5.1) |
and in particular we have intersection multiplicities and . Since and are relatively prime, we must have , i.e. there is just a single cabling parameter .
To prove (b), let be complex coordinates for and consider the parameterization of as in (3.5.1). Observe that if has a cusp at then there is at most one topologically nontrivial cabling parameter , i.e for some we have for all . Then the parameterization (3.5.1) takes the form
| (3.5.2) |
Assuming without loss of generality, then the multiplicity of at is , so we must have . Note that for , so have , and (3.5.2) becomes
| (3.5.3) |
Then the polynomial
has lowest degree term when composed with the parameterization (3.5.3), which means that satisfies . ∎
We are now ready to complete the proof of Theorem E.
Proof of Theorem E.
Suppose first that is nonzero. which means that for any choice of and generic the moduli space is nonempty. By genericity any curve satisfies the constraint strictly, and hence has a cusp by Lemma 3.5.3(a). After a small perturbation we can further assume that all singularities of away from the main cusp are positive ordinary double points.
Conversely, suppose that there is a -sesquicuspidal symplectic curve in lying in homology class which is positively immersed away from the cusp point . Let be a tame almost complex structure on which is integrable near and preserves . By Lemma 3.5.3(b) we can find such that strictly satisfies . Finally, by Proposition 3.5.6 below we have . ∎
Note that by combining Theorem E and the symplectic deformation invariance part of Theorem 3.3.2, we have:
Corollary 3.5.5.
Let be a closed symplectic four-manifold, and suppose that is an index zero -sesquicuspidal rational symplectic curve in . Then for any symplectic deformation of there exists an index zero -unicuspidal rational symplectic curve in satisfying .
Lastly, the following Proposition 3.5.6 allows us to give lower bounds for the counts when is a smooth complex projective surface by constructing sesquicuspidal algebraic curves, even if the natural Kähler form on is not flat (e.g. ).
Proposition 3.5.6.
Let be a closed four-dimensional symplectic manifold and a homology class such that for some relatively prime. Let be spanning local divisors at , and let be any almost complex structure. Suppose that there exist, for some , curves which are immersed away from the constraint. Then we have .
Proof.
We do not assume that is generic, but by a version of automatic transversality (see [Bar]) the curves are regular. Then for any sufficiently small generic perturbation of , the curves deform to curves . Again by automatic transversality, all curves in are regular and count positively (c.f. [MS5, §5.2]). Since is generic, we have by definition . ∎
3.6. Stabilization invariance II
We end this section by discussing the closed curve counterpart of Theorem 2.6.1:
Theorem 3.6.1.
Let be a closed symplectic manifold, a homology class, and a tuple such that . For another closed symplectic manifold, we have
| (3.6.1) |
provided that the moduli spaces underlying both sides of (3.6.1) are robust and deformation invariant.
Here denotes the tuple given by padding with ones. Together with the equivalence from §3.4, this imples Theorem 2.6.1.
To prove Theorem 3.6.1, observe that, by the deformation invariance assumption, we can assume without loss of generality that the symplectic form on is integral. Then by Donaldson’s theorem we can find a full flag of smooth symplectic divisors:
where for . Here is simply a point in , and we pick also a preferred basepoint .
Let be a collection of spanning smooth local symplectic divisors at the point , such that are tangent to , and is tangent to for . As a shorthand, we put for .
Choose an admissible almost complex structure which preserves for and is otherwise generic. Then for we have a natural inclusion map
| (3.6.2) |
Here is shorthand for when appearing in a constraint on a space of dimension .
Lemma 3.6.2.
For , the inclusion map (3.6.2) is a regularity-preserving bijection.
Proof.
Suppose by contradiction that there is some curve
Viewing as a curve in , note that by positivity of intersections must have nonnegative homological intersection number with the -holomorphic divisor , and in fact this is positive since passes through the point . On the other hand, the classes and evidently have trivial homological intersection number, so this is a contradiction.
4. From perfect exceptional classes to unicuspidal curves
We first discuss resolution of singularities in §4.1 from the point of view of the box diagram. In §4.2 we elaborate on the role of the local divisor in guiding the resolution, with a view towards enumerative problems. In §4.3 we prove a correspondence theorem relating multidirectional tangency counts with relative Gromov–Witten invariants. In §4.4 to prove Theorem G by a degeneration argument involving generic and nongeneric almost complex structures on blowups. Finally, in §4.5 we apply these techniques to classify rigid unicuspidal curves in the first Hirzebruch surface.
4.1. Resolution of singularities and the box diagram
We begin by discussing some aspects of embedded resolution of singularities for curve singularities. In brief, blowing up a cusp results in a cusp, and by repeatedly blowing up we arrive at a smooth resolution . The numerics of the resulting chain of divisors can be neatly encoded in a device called the “box diagram”, which also manifests connections with ellipsoidal ends.
In more detail, let be a closed symplectic four-manifold and a tame almost complex structure which is integrable near . Let be a -holomorphic curve with a cusp singularity at for some relatively prime. We denote by the (complex analytic) blowup of at , and by the proper transform of . Let be smooth local -holomorphic divisors in which intersect transversely at such that strictly satisfies the constraint (these exist by Lemma 3.5.3(b)). Since has multiplicity at , has contact order with the proper transform of , while is disjoint from the proper transform of . We take to be the exceptional divisor resulting from the blowup . Then strictly satisfies the constraint , where we put and . After possibly swapping and , we can assume that .
Remark 4.1.1.
Note that has the parametrization , and its blowup at the origin has the parametrization
where , i.e. the blowup has a cusp at .
We proceed by blowing up at , giving a proper transform which strictly satisfies , with and . Continuing in this manner, we eventually arrive, after say blowups, at the minimal resolution , which is smooth. After some additional blowups, say overall, we arrive at the normal crossings resolution , which further satisfies that the total transform of in (i.e. the preimage of under the blowup map ) is a normal crossings divisor.
For , let denote the exceptional divisor which is the preimage of under the blowup map , and let denote its proper transform in for . We also put for . Note that each blowup adds a summand to the second homology, and we have a natural identification
with and for all and .
In the study of symplectic embeddings of four-dimensional ellipsoids , a key role is played by the weight sequence [MS2, §1], which is a sequence of positive integers associated to . The following pictorial perspective will be useful:
Definition 4.1.2.
Given relatively prime, the box diagram is the unique decomposition into squares of the rectangle with horizontonal length and vertical length , subject to the following rules:
-
(1)
for , we have (i.e. we take the trivial decomposition)
-
(2)
if , then consists of the square flush with the left side of , along with the decomposition of the remainder according to
-
(3)
if , then consists of the square flush with the bottom side of , along with the decomposition of the remainder according to .
The squares in are totally ordered by the rule that a square comes before any other square which lies to its right or above it, and we view the th square as representing for . The weight sequence of is then , where is the side length of the th square in for . Note that each square in except for the last one touches either the top side or the right side of , and we denote the corresponding spheres by and respectively. Thus the preimage of under the blowup map is
The following properties of the box diagram are elementary to verify and show that it encodes the numerics of the resolution of a cusp.
Lemma 4.1.3.
(see also [MS2, §A] and [McD1, Fig. 3.4])
-
(a)
For we have , where if the th square in lies either immediately to the right of or immediately above the th square, and otherwise.
-
(b)
For , and meet in a single point if , and otherwise. Similarly, for , and meet in a single point if , and otherwise.
-
(c)
meets each of in a single point and is disjoint from and
-
(d)
The normal crossing resolution intersects in one point and is disjoint from .
In particular, the self-intersection number is , where is the number of squares in which lie immediately to the right of or immediately above the th square, and we have .
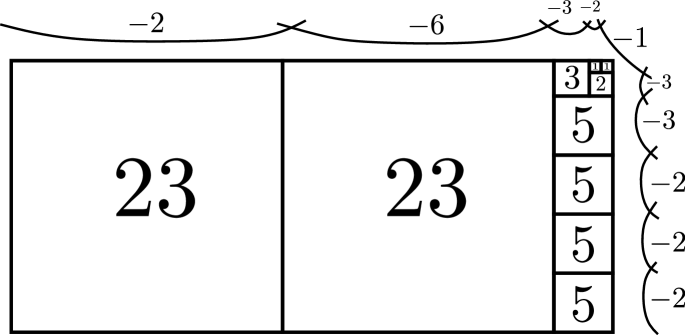
Example 4.1.4.
Figure 2 shows the box diagram for , which has weight sequence is . The curves appear at the top, with respective self-intersection numbers , and the curves appear at the right, with respective self-intersection numbers .
Remark 4.1.5.
We can also write the weight sequence of without repetitions in the form , with . Then is precisely the continued fraction expansion coefficients of , i.e. we have
4.2. The role of the local divisor
In the above description of , the blowup points all depend on the initial curve , so a priori another curve with a cusp at would have a resolution living in a different blowup on , thereby complicating our counting efforts. The next lemma shows that in fact depends only on a certain jet of the divisor . As before we put and assume .
Lemma 4.2.1.
Let be smooth local -holomorphic divisors passing through and having the same -jet at . Let be -holomorphic curves, each having a cusp at , and such that . Then the sequence of blowups of which achieves the normal crossing resolution of is the same as that for .
Proof.
We proceed by induction on . Here we allow the case , which corresponds to being smooth but having contact order with respectively. For the base case we suppose , so that and are both smooth and pass through with multiplicity . In this case by convention the normal crossing resolution for both and is obtained by blowing up once at .
For the inductive step, note that the first blowup for both and occurs at . Let denote the resulting exceptional divisor, and let denote the respective proper transforms of . Since and are tangent at , and intersect at the same point, say .
Suppose first that , or equivalently , so that and both have a cusp at , and we have . Then by the inductive hypothesis, with playing the respective roles of and playing the roles of both and , the remaining blowups for and coincide.
Now suppose that , so that and each has a cusp at , and the weight sequence of is . Since has multiplicity at , we have
and similarly . Note also that and have the same -jet at . Therefore we may again apply the inductive hypothesis to conclude that the remaining blowups for and coincide. ∎
In light of the above lemma, the following notation is well-defined, i.e. independent of the choice of . As above we put , with relatively prime positive integers, and let be a closed symplectic manifold and a tame almost complex structure which is integrable near a point .
Notation 4.2.2.
Put , where is the iterated (complex analytic) blowup of which achieves the normal crossing resolution for a local -holomorphic curve which has a cusp at and satisfies .
We will sometimes use the shorthand when the data is implicit or immaterial.
Note that by construction inherits an almost complex structure which is integrable near the spheres and preserves each of them. In fact, we can also identify diffeomorphically with the corresponding symplectic blowup using small Darboux balls, and we thereby equip with a symplectic form which tames (and is uniquely defined up to symplectic deformation).
4.3. Relationship with relative Gromov–Witten theory
Following Notation 4.2.2, put , with almost complex structure . Put also , where . Note that we have and for , so by positivity of intersections any -holomorphic curve in in homology class intersects in one point and is disjoint from .
Put , and let be any smooth local -holomorphic divisor in which passes through and intersects transversely. By the above discussion, since any -holomorphic curve in has a proper transform in and conversely any -holomorphic curve in can be projected to a curve in , we have:
Proposition 4.3.1.
There is a natural bijective correspondence
Corollary 4.3.2.
Let be a closed symplectic four-manifold and a homology class such that for some relatively prime. Then the multidirectional tangency count agrees with the genus zero symplectic Gromov–Witten invariant of in homology class relative to the norming crossing divisor , with specified intersection pattern as above.
Example 4.3.3.
It is important to note that the relative Gromov–Witten invariant in Corollary 4.3.2 is not generally equal to the absolute Gromov–Witten invariant in the same homology class (although we see in §4.4 that they do agree when is a perfect exceptional class, in which case both counts are equal to ). As a simple example, coincides with the local tangency invariant from [MS3], whereas the corresponding absolute Gromov–Witten invariant is . Incidentally, the “combining constraints” formula in [MS3, §4.2] describes precisely how the curves in degenerate as we deform a generic to the nongeneric blowup almost complex structure , with of them landing in and the remaining limiting to reducible configurations in . For a different approach to this question via curves with negative ellipsoidal ends see [CGHM, Prop.3.5.1].
Remark 4.3.4.
Let and denote the self-intersection numbers of and respectively. As explained in [GS, §2.1], these give the negative (a.k.a. Hirzebruch–Jung) continued fraction expansions of and respectively, where is the remainder of the division of by . Namely, we have and , where in general we put
If , then the cyclic quotient surface singularity777This is modeled on the quotient of by the action of the group of th roots of unity. has a resolution which introduces a chain of spheres with self-intersection numbers .
Example 4.3.5.
Let denote the line passing through and , and let denote the set of points in the first quadrant which lie on or above . Consider the noncompact toric surface with moment map polytope . Then is a weighted blow up of at the origin, and it has two cyclic quotient singularities and . We can resolve both of these by toric blowups, giving a smooth surface having two chains of spheres with self-intersection numbers and respectively. These chains are joined by the -sphere in which is the proper transform of the toric divisor in lying over the slant edge in .
Observe that in Example 4.3.5 the resolved surface bears striking resemblance to the result of embedded resolution of singularities for a curve with a cusp at the origin. This offers the following perspective on Theorem D. Put and . Given a local curve which strictly satisfies , by iteratively blowing up we arrive at the normal crossing resolution , which intersects the -sphere in one point and is disjoint from the other spheres . Then after blowing down we get a smooth curve in which is disjoint from the two orbifold points. At least heuristically, this is akin to a curve in the negative symplectic completion of with negative end asymptotic to one of the Reeb orbits in the family from Remark 2.3.9. This picture easily extends to any closed symplectic manifold , noting that all relevant blowups can taken in a small neighborhood of the image of an ellipsoid embedding for sufficiently small.
4.4. Degenerating to the nongeneric blowup
The goal of this subsection is to prove Theorem G. As before, let be a closed symplectic manifold, and let be a tame almost complex structure which is integrable near a point . Let be relatively prime positive integers, and put . Let be a smooth local -holomorphic divisor passing through , and put .
Recall that we have the identification
In particular, note that depends only on and and not on the data . A general element in takes the form for some , with first Chern number and self-intersection number .
Definition 4.4.1.
A homology class is exceptional if it satisfies and , and is represented by a symplectically embedded two-sphere in .
A priori the last condition in Definition 4.4.1 is nontrivial to check, but for blowups of there is a purely combinatorial characterization in terms of elementary Cremona transformations (see [MS2, Prop. 1.2.12]).
Definition 4.4.2.
A homology class is -perfect exceptional888This usage differs slightly from other sources. if is an exceptional class.
Note that a -perfect exceptional class satisfies .
A standard fact about exceptional homology classes is that the corresponding Gromov–Witten invariant is equal to .
Lemma 4.4.3.
Let be a closed symplectic four-manifold, and suppose that is an exceptional class. Then we have , and in particular for any .
The basic idea is that using and positivity of intersections there cannot be two irreducible -holomorphic spheres in the same exceptional class. Meanwhile, using the fact that has a symplectically embedded representative we can engineer a choice of almost complex structure which preserves it. Also, any irreducible pseudoholomorphic sphere in an exceptional class is necessarily nonsingular by the adjunction formula. Note that we have for generic (but not necessarily for arbitrary ).
Observe that the almost complex structure on is not generic, since it preserves the spheres which all have negative index. Therefore a priori an exceptional class might be represented by a degenerate configuration, in which case it does not necessarily blow down to a nice curve in . The next lemma, which is the final ingredient to prove Theorem G, shows that this cannot occur provided that is generic away from .
Lemma 4.4.4.
Let be a closed symplectic four-manifold, and let be an -perfect exceptional class for some relatively prime. Let be smooth local symplectic divisor passing through , and suppose that is integrable near , preserves , and is otherwise generic. Put with its induced almost complex structure , and put , where . Then we have .
Deferring the proof for the moment, we complete the proof of Theorem G.
Proof of Theorem G.
Pick any smooth local divisor divisors which span at a point , and generic . We assume without loss of generality, and put with its induced almost complex structure .
Suppose first that there is an index zero rational -unicuspidal symplectic curve in in homology class . By Proposition 4.3.1 and Theorem E we have
In particular, is represented by a symplectically embedded sphere in . The fact that has index zero translates into , while being -unicuspidal translates into .
Conversely, suppose that is a -perfect exceptional, i.e. is an exceptional class. By Lemma 4.4.4 we have , so by Lemma 4.4.3 we have
By Proposition 4.3.1 and genericity of we thus have
Finally, by Theorem E there exists a rational -sesquicuspidal symplectic curve in lying in homology class , and this is necessarily unicuspidal by the adjunction formula.
∎
Remark 4.4.5.
If is a smooth complex projective surface, it is not a priori clear whether the analogue of Lemma 4.4.4 holds for its prefered integrable almost complex structure, which is not necessarily generic. However, if it does, then the argument in the proof of Theorem G shows that any perfect exceptional class corresponds to an algebraic unicuspidal curve.
Proof of Lemma 4.4.4.
As in §4.1, let denote the -holomorphic spheres in which project to under the blowup map , with with for .
Given , it suffices to show that is irreducible. Suppose by contradiction that has more than one component. Since is generic outside of a small neighborhood of , by index considerations we can assume that at least one component of covers one of . Put , where no component of is contained in and each component of is contained in , with both nonempty.
Claim 4.4.6.
We have .
Proof.
It suffices to show that for . Recall that we have for and . ∎
Let be a sufficiently small generic perturbation of (note that are not -holomorphic). Then we can deform to a -holomorphic curve with . Indeed, since is generic outside of a small neighborhood of , we can assume that the underlying simple curve of each component is regular, and hence unobstructed under small perturbations of .
Moreover, since is an exceptional class, by Lemma 4.4.3 and genericity of there exists a -holomorphic sphere .
Claim 4.4.7.
must intersect in isolated points, i.e. does not have any component with the same image as .
Proof.
We will argue using Lemma 4.4.8 below that no component of can lie in a homology class which is a nonzero multiple of . Firstly, note that no component of can lie in a homology class of the form for some and . Indeed, by the way was constructed we would then have a component of of the same form, but then we have
which violates positivity of intersections.
Now suppose by contradiction that has a component such that for some nonzero , and let denote the total homology class of the remaining components of , so that we have . Note that the natural projection map satisfies and and hence , so we have
By Lemma 4.4.8 we have , and hence , which is a contradiction. ∎
Finally, by positivity of intersections we have and , and hence
which is a contradiction. ∎
Lemma 4.4.8.
Any -holomorphic curve in represents a homology class which is either of the form (i) for some and , or else it is of the form (ii) , where and satisfies .
Proof.
Let be a -holomorphic curve in , and put for some and . Evidently it suffices to prove the lemma in the case that is simple, whence . Since is generic and are exceptional classes, there is a curve component for . If does not cover any of then by positivity of intersections we have for , so we have
and hence . ∎
4.5. The case of the first Hirzebruch surface
Let denote the first Hirzebruch surface, i.e. the one-point blowup of . We can also view this as the toric Kähler manifold whose moment polygon has vertices . This choice of normalization makes the symplectic form monotone, although in light of Corollary 3.5.5 we will only be concerned with the symplectic form up to symplectic deformation.
Let denote the line class and the exceptional class, so that any takes the form for some . By Theorem G, index zero rational unicuspidal symplectic curves in are in bijective correspondence with perfect exceptional classes in . Putting
we can reformulate this as:
Corollary 4.5.1.
There is an index zero -unicuspidal symplectic curve in in homology class if and only if we have .
Put also
A comprehensive description of is given in [MMW], so together with Corollary 4.5.1 this describes all index zero -unicuspidal rational symplectic curves in . Here we make just a few remarks about , referring the reader to loc. cit. for more details.
Theorem 4.5.2 ([MM, MMW]).
-
•
The forgetful map is injective, i.e. for each there is at most one . More precisely, for any we must have and , where and (and one can check that are integers for at most one value of ).
-
•
If , then we also have .
-
•
If with , then we also have .
Remark 4.5.3.
As we show in [MS4], the symmetry has a natural geometric interpretation in terms of the generalized Orevkov twist, which is a birational transformation . We currently do not of any geometric interpretation of the symmetry . It is not currently clear whether every index zero rational -cuspidal symplectic curve in is realized by an algebraic curve.
References
- [Bar] Jean-François Barraud. Courbes pseudo-holomorphes équisingulieres en dimension 4. Bulletin de la Société Mathématique de France 128(2000), 179–206.
- [BEH+] Frédéric Bourgeois, Yakov Eliashberg, Helmut Hofer, Krzysztof Wysocki, and Eduard Zehnder. Compactness results in symplectic field theory. Geom. Topol. 7(2003), 799–888.
- [CH] Lucia Caporaso and Joe Harris. Counting plane curves of any genus. Invent. Math. 131(1998), 345–392.
- [CM1] Kai Cieliebak and Klaus Mohnke. Symplectic hypersurfaces and transversality in Gromov-Witten theory. J. Symplectic Geom. 5(2007), 281–356.
- [CM2] Kai Cieliebak and Klaus Mohnke. Punctured holomorphic curves and Lagrangian embeddings. Invent. Math. 212(2018), 213–295.
- [CGHMP] Dan Cristofaro-Gardiner, Tara S Holm, Alessia Mandini, and Ana Rita Pires. On infinite staircases in toric symplectic four-manifolds. arXiv:2004.13062 (2020).
- [CGH] Daniel Cristofaro-Gardiner and Richard Hind. Symplectic embeddings of products. Comment. Math. Helv. 93(2018), 1–32.
- [CGHM] Daniel Cristofaro-Gardiner, Richard Hind, and Dusa McDuff. The ghost stairs stabilize to sharp symplectic embedding obstructions. J. Topol. 11(2018), 309–378.
- [EN] David Eisenbud and Walter D Neumann. Three-dimensional link theory and invariants of plane curve singularities. Princeton University Press, 1985.
- [EG] John B Etnyre and Marco Golla. Symplectic hats. arXiv:2001.08978 (2020).
- [FdBLMHN] Javier Fernández de Bobadilla, Ignacio Luengo, Alejandro Melle Hernández, and Andras Némethi. Classification of rational unicuspidal projective curves whose singularities have one Puiseux pair. pages 31–45. Springer, 2006.
- [GS] Marco Golla and Laura Starkston. The symplectic isotopy problem for rational cuspidal curves. Compositio Mathematica 158(2022), 1595–1682.
- [GH] Jean Gutt and Michael Hutchings. Symplectic capacities from positive -equivariant symplectic homology. Algebr. Geom. Topol. 18(2018), 3537–3600.
- [HK] Richard Hind and Ely Kerman. New obstructions to symplectic embeddings. Invent. Math. 196(2014), 383–452.
- [Hut1] Michael Hutchings. Quantitative embedded contact homology. J. Differential Geom. 88(2011), 231–266.
- [Hut2] Michael Hutchings. Lecture notes on embedded contact homology. pages 389–484. Springer, 2014.
- [HT] Michael Hutchings and Clifford Henry Taubes. Gluing pseudoholomorphic curves along branched covered cylinders. I. J. Symplectic Geom. 5(2007), 43–137.
- [KV] Joachim Kock and Israel Vainsencher. An invitation to quantum cohomology: Kontsevich’s formula for rational plane curves. Springer Science & Business Media, 2007.
- [KM] Maxim Kontsevich and Yu Manin. Gromov-Witten classes, quantum cohomology, and enumerative geometry. Communications in Mathematical Physics 164(1994), 525–562.
- [MM] Nicki Magill and Dusa McDuff. Staircase symmetries in Hirzebruch surfaces. Algebr. Geom. Topol. (To appear).
- [MMW] Nicki Magill, Dusa McDuff, and Morgan Weiler. Staircase patterns in Hirzebruch surfaces. arXiv:2203.06453 (2022).
- [McD1] Dusa McDuff. Symplectic embeddings of 4-dimensional ellipsoids. Journal of Topology 2(2009), 1–22.
- [McD2] Dusa McDuff. A remark on the stabilized symplectic embedding problem for ellipsoids. Eur. J. Math. 4(2018), 356–371.
- [MS1] Dusa McDuff and Dietmar Salamon. J-holomorphic curves and symplectic topology. American Mathematical Soc., 2012.
- [MS2] Dusa McDuff and Felix Schlenk. The embedding capacity of 4-dimensional symplectic ellipsoids. Ann. of Math. (2) 175(2012), 1191–1282.
- [MS3] Dusa McDuff and Kyler Siegel. Counting curves with local tangency constraints. Journal of Topology 14(2021), 1176–1242.
- [MS4] Dusa McDuff and Kyler Siegel. Rational cuspidal curves and symplectic staircases. (In preparation).
- [MS5] Dusa McDuff and Kyler Siegel. Symplectic capacities, unperturbed curves, and convex toric domains. Geometry and topology (To appear).
- [MS6] Grigory Mikhalkin and Kyler Siegel. Ellipsoidal superpotentials and stationary descendants. arXiv:2307.13252 (2023).
- [Neu] Walter D Neumann. Topology of hypersurface singularities. arXiv:1706.04386 (2017).
- [Ore] S Yu Orevkov. On rational cuspidal curves: I. Sharp estimate for degree via multiplicities. Mathematische Annalen 324(2002), 657–673.
- [Per] Miguel Pereira. Equivariant symplectic homology, linearized contact homology and the Lagrangian capacity. arXiv:2205.13381 (2022).
- [Sch] Felix Schlenk. Symplectic embedding problems, old and new. Bull. Amer. Math. Soc. (N.S.) 55(2018), 139–182.
- [Ton] Dmitry Tonkonog. String topology with gravitational descendants, and periods of Landau-Ginzburg potentials. arXiv:1801.06921 (2018).
- [Wen1] Chris Wendl. Automatic transversality and orbifolds of punctured holomorphic curves in dimension four. Comment. Math. Helv. 85(2010), 347–407.
- [Wen2] Chris Wendl. Lectures on Symplectic Field Theory. https://www.mathematik.hu-berlin.de/~wendl/Sommer2020/SFT/lecturenotes.pdf, 2020.