Exponentially -preinvex and -invex functions in mathematical programming
Abstract
In this paper, we introduce a new concept of generalized convexity for -differentiable vector optimization problems. Namely, the notion of exponentially -invexity is defined. Further, some properties and results of exponentially -invex functions are studied. The sufficient optimality conditions are derived under appropriate (generalized) exponentially -invexity hypotheses. To exemplify the application of our proposed concept, we have included an appropriate example.
Key Words: Exponentially -invex function; -differentiable vector optimization; optimality conditions.
AMS Classification: 90C26, 90C29, 90C30, 90C46
1 Introduction
Multiobjective optimization serves as a valuable mathematical framework to address real-world challenges involving conflicting objectives found in engineering, economics, and decision-making. However, many studies have traditionally assumed convexity in these problems (see, for example, [23], [39], [37]). To broaden the scope beyond convexity assumptions in theorems related to optimality conditions and duality, various concepts of generalized convexity have been introduced (see, for example, [1], [2], [6], [7], [8], [9], [10], [21], and others). One particularly beneficial generalization is invexity, as introduced by Hanson [16]. This involves considering differentiable functions, denoted as where is a subset of For these functions, Hanson proposes the existence of an n-dimensional vector function such that, for all the inequality
holds. Ben Israel and Mond [13], Hanson and Mond [17], Craven and Glover [14], along with numerous others, have explored various aspects, applications, and broader concepts related to these functions.
Youness [42] initially introduced the concept of -convexity. Recently, there has been considerable interest in expanding the idea of -convexity to novel classes of generalized -convex functions, and researchers have investigated their characteristics (see, for example, [4], [5], [8], [9], [15], [18], [19], [20], [22], [27], [32], [36], [38], [40], [41], [44], and others). Antczak [43] discussed the applications of exponentially convex functions in the mathematical programming and optimization theory. Following the research by Hanson and Craven, various forms of differentiable functions have emerged, aiming to extend the concept of invex functions. One such function involves exponential functions (see, for example, [3], [10], [28], [29], [30], [31], [33], [34], and others).
In this paper, a new class of nonconvex -differentiable vector optimization problems with both inequality and equality constraints is considered in which the involved functions are exponentially (generalized) -invex. Therefore, the concepts of exponentially pseudo--invex and exponentially quasi--invex functions for -differentiable vector optimization problems are introduced. Furthermore, we derive the sufficiency of the so-called -Karush-Kuhn-Tucker optimality conditions for the considered -differentiable vector optimization problem under appropriate exponentially (generalized) -invexity hypotheses. This result is illustrated by suitable example of smooth multiobjective optimization problem in which the involved functions are exponentially (generalized) -invex functions.
2 Preliminaries
Throughout this paper, the following conventions vectors and in will be followed:
(i) if and only if for all ;
(ii) if and only if for all ;
(iii) if and only if for all ;
(iv) if and only if for all but ;
(v) is the negation of
Definition 1
[4] Let . A set is said to be an -invex set if and only if there exists a vector-valued function such that the relation
holds for all and any .
Remark 2
If is a vector-valued function defined by , then the definition of an -invex set reduces to the definition of an -convex set (see Youness [42]).
Definition 3
Let . A function is said to be -preinvex on if and only if the following inequality
| (1) |
holds for all and any .
Now, we introduce a new concept of the exponentially -preinvex function.
Definition 4
Let A function is said to be exponentially -preinvex on if and only if the following inequality
| (2) |
holds for all and any .
In other words, (2) is equivalent to the fact that the following inequalities
| (3) |
holds for all and any .
Definition 5
Let A function is said to be strictly exponentially -preinvex on if and only if the following inequality
| (4) |
holds for all , , and any .
Definition 6
Let A function is said to be exponentially quasi--preinvex on if and only if the following inequality
| (5) |
holds for all and any .
Definition 7
Let A function is said to be strictly exponentially quasi--preinvex on if and only if the following inequality
| (6) |
holds for all and any .
Note that every exponentially preinvex function is exponentially quasi--preinvex and every exponentially -preinvex function is exponentially quasi--preinvex. However, the converse is not true.
Definition 8
Let We define the -epigraph of an exponentially function as follows
Theorem 9
Let be a nonempty -invex subset of and be an exponentially function. Then is -preinvex if and only if its -epigraph is an -invex set.
Proof. Let be an exponentially -preinvex function. Then for any and epiE(), we have . Also, for each , we have
| (7) |
Thus, epiE(). Hence, epiE() is -invex.
Conversely, let epiE() be an -invex set, epiE() and epiE(). Then for each and each , we have
| (8) |
and thus,
| (9) |
Hence, is exponentially -preinvex on
We now give the characterization of an exponentially quasi--preinvex function in terms of -preinvexity of its level sets.
Theorem 10
Let and be a nonempty -invex subset of A function is exponentially quasi--preinvex function if and only if the level sets are -invex for all
Proof. Let be an exponentially quasi--preinvex function, and for , let . Then . Since is an exponentially quasi--preinvex function, for each , we have
that is, for each Hence, is -invex.
Conversely, let and Then , and by -invexity of , we have for each Thus for each ,
This completes the proof.
Definition 11
[26] Let and be a (not necessarily) differentiable function at a given point . It is said that is an -differentiable function at if and only if is a differentiable function at (in the usual sense) and, moreover,
where as .
Now, we introduce a new concept of generalized exponentially convexity for -differentiable functions.
Definition 12
Let be a nonempty open -invex subset of and be an -differentiable function at on . It is said that is exponentially -invex function at on if, there exist such that, for all , the inequality
| (10) |
holds. If inequality (11) holds for any on , then is exponentially -invex function on
Definition 13
Let be a nonempty open -invex subset of and be an -differentiable function at on . It is said that is exponentially strictly -invex function at on if, there exist such that, for all , the inequality
| (11) |
holds. If inequality (11) holds for any on , then is exponentially strictly -invex function on
Now, we give the necessary condition for an -differentiable exponentially -invex function.
Proposition 14
Let be an -differentiable exponentially -invex function (an -differentiable exponentially strictly -invex function) on Then, the following inequality
| (12) |
holds for all .
Proof. Since is an -differentiable exponentially -invex function, by Definition 12, the following inequalities
| (13) |
| (14) |
hold for all By adding above inequalities, we get that the following inequality
| (15) |
holds for all .
Now, we introduce the definitions of generalized exponentially -invex functions. Namely, the following result gives the characterization of an exponentially quasi--invex function in terms of its gradient.
Definition 15
Let and be an -differentiable function at . The function is said to be an exponentially quasi--invex at on if the relation
| (16) |
holds for each . If (16) is satisfied for every , then the function is said to be an exponentially quasi--invex on .
Definition 16
Let and be an -differentiable function at . The function is said to be an exponentially pseudo--invex at on if the relation
| (17) |
holds for each . If (17) is satisfied for every , then the function is said to be an exponentially pseudo--invex on .
Definition 17
Let and be an -differentiable function at . The function is said to be an exponentially strictly pseudo--invex at on if the relation
| (18) |
holds for each , . If (18) is satisfied for every , , then the function is said to be an exponentially strictly pseudo--invex on .
Now, we present an example of such an exponentially pseudo--invex function which is not exponentially -invex.
Example 18
Let and be a nondifferentiable function at defined by and The function is a differentiable function at , thus is an -differentiable function at . Now we show that is exponentially pseudo--invex on . Let and , and assume that . We have . This inequality implies that . Hence, we have
Therefore, by
Definition 16, is exponentially pseudo--invex on .
Further, it can be shown that is also exponentially quasi--invex on . Assume
that . We have . This
inequality implies that . Hence, we have
Therefore, by Definition 15, is exponentially quasi--invex on .
Definition 19
Let . It said that is a global -minimizer of if the inequality
holds for all .
Proposition 20
Let and be an -differentiable exponentially -invex function on If , then is an -minimizer of .
Proof. Let . Further, assume that is an -differentiable exponentially -invex function on Hence, by Definition 12, the inequality
| (19) |
holds for all Since and (19), therefore, we have that the relation
| (20) |
implies that the inequality
holds for all . This means, by Definition 19, that is an -minimizer of .
Proposition 21
Let be an operator and be an -differentiable exponentially pseudo--invex function on If , then is an -minimizer of .
3 -optimality conditions for multiobjective programming problems
Consider the following multiobjective programming problem (VP):
where , and , are -differentiable functions defined on Let
be the set of all feasible solutions of (VP). Further, by the set of inequality constraint indices that are active at a feasible solution , that is,
Let be a given one-to-one and onto operator. Now, for the -differentiable vector optimization problem (VP), we define its associated differentiable vector optimization problem (VPE) as follows:
Let be the set of all feasible solutions of (VPE).
Definition 22
A feasible point is said to be a weak -Pareto (weakly -efficient) solution for (VP) if and only if there exists no feasible point such that
Definition 23
A feasible point is said to be an -Pareto (-efficient) solution for (VP) if and only if there exists no feasible point such that
Remark 24
Let be an -Pareto solution (a weak -Pareto solution) of the problem (VP). Then, is a Pareto solution (a weak Pareto solution) of the problem (VPE).
Theorem 25
[44] (-Karush-Kuhn-Tucker necessary optimality conditions). Let be a weak -Pareto solution of (VP). Moreover, let (), (), and (), be -differentiable and the Kuhn-Tucker constraint qualification be satisfied at . Then there exist , and such that
| (21) |
| (22) |
| (23) |
Definition 26
Now, we prove the sufficiency of the -Karush-Kuhn-Tucker necessary optimality conditions for the considered -differentiable vector optimization problem (VP) under exponentially -invexity hypotheses.
Theorem 27
Let be an -KKT point of (VP). Let and . Furthermore, assume the following hypotheses are fulfilled:
-
a)
, , is -differentiable exponentially -invex function at on ,
-
b)
, , is -differentiable exponentially -invex function at on ,
-
c)
, , is -differentiable exponentially -invex function at on ,
-
d)
, , is -differentiable exponentially -invex function at on .
Then is a weak -Pareto solution of (VP).
Proof. By assumption, is an -KKT point of (VP). Then, by Definition 26, the relations (21)-(23) are satisfied at with Lagrange multipliers , and . We proceed by contradiction. Assume, contrary to the conclusion, that is not a weak -Pareto solution of (VP). Hence, by Definition 22, there exists another such that
| (24) |
Using hypotheses a)-d), by Definition 4 and Definition 12, the following inequalities
| (25) |
| (26) |
| (27) |
| (28) |
hold, respectively. Combining (24) and (25) and then multiplying the resulting inequalities by the corresponding Lagrange multipliers and adding both their sides, we get
| (29) |
Multiplying inequalities (26)-(28) by the corresponding Lagrange multipliers, respectively, we obtain
| (30) |
| (31) |
| (32) |
Using the condition (22) together with and , we get, respectively,
| (33) |
| (34) |
| (35) |
Combining (29) and (33)-(35), we obtain that the following inequality
holds, which is a contradiction to the condition (21). Thus, the proof of this theorem is completed.
If stronger -differentiable exponentially -invexity hypotheses are imposed on the functions constituting the considered vector optimization problems, then the sufficient optimality conditions for a feasible solution to be an -Pareto solution of the problem (VP) result is true.
Theorem 28
Let be an -KKT point of (VP). Furthermore, assume that the following hypotheses are fulfilled:
-
a)
, , is -differentiable exponentially strictly -invex function at on ,
-
b)
, , is -differentiable exponentially -invex function at on ,
-
c)
, , is -differentiable exponentially -invex function at on ,
-
d)
, , is -differentiable exponentially -invex function at on .
Then is an -Pareto solution of (VP).
Proof. The proof of this theorem is similar to the proof of Theorem 27 and is omitted.
Remark 29
According to the proof of Theorem 27, the sufficient conditions are also satisfied if , , , , , , are -differentiable exponentially quasi--invex function at on .
Now, under the concepts of generalized -differentiable exponentially -invexity, we prove the sufficient optimality conditions for a feasible solution to be a weak -Pareto solution of the problem (VP).
Theorem 30
Let be an -KKT point of (VP). Furthermore, assume that the following hypotheses are fulfilled:
-
a)
, , is -differentiable exponentially pseudo--invex function at on ,
-
b)
, , is -differentiable exponentially quasi--invex function at on ,
-
c)
, , is -differentiable exponentially quasi--invex function at on ,
-
d)
, , is -differentiable exponentially quasi--invex function at on .
Then is a weak -Pareto solution of (VP).
Proof. By assumption, is a Karush-Kuhn-Tucker point in the considered constrained -optimization problem (VP). Then, by Definition 26, the Karush-Kuhn-Tucker necessary optimality conditions (21)-(23) are satisfied at with Lagrange multipliers , and . We proceed by contradiction. Suppose, contrary to the result, that is not a weak Pareto solution in problem (VP). Hence, by Definition 23, there exists another such that
| (36) |
Thus,
| (37) |
By hypothesis (a), the objective function is -differentiable exponentially pseudo--invex at on . Then, (37) gives
| (38) |
By the -Karush-Kuhn-Tucker necessary optimality condition (23) and inequality (38) yields
| (39) |
Since , , therefore, the -Karush-Kuhn-Tucker necessary optimality conditions (22) and (23) imply
Thus,
From the assumption, each , , is an -differentiable exponentially quasi--invex function at on . Then, by Definition 15, we get
| (40) |
Thus, by the -Karush-Kuhn-Tucker necessary optimality condition (23), and by Definition 15, (40) gives
Hence, taking into account , , we have
| (41) |
From , , we get
| (42) |
| (43) |
Thus,
| (44) |
| (45) |
Since each equality constraint , , and each function , , is an -differentiable exponentially quasi--invex function at on , then by Definition 15, (44) and (45) give, respectively,
| (46) |
| (47) |
Hence, taking into account , , we have
| (48) |
Combining (39), (41) and (48), we get that the following inequality
which is a contradiction to the -Karush-Kuhn-Tucker necessary optimality condition (21). Thus, the proof of this theorem is completed.
In order to illustrate the above sufficient optimality conditions, we now present an example of an -differentiable problem in which the involved functions are exponentially (generalized) -invex.
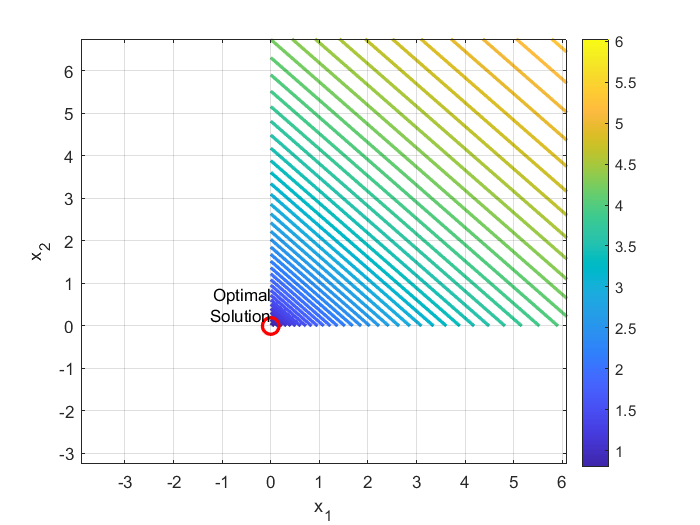
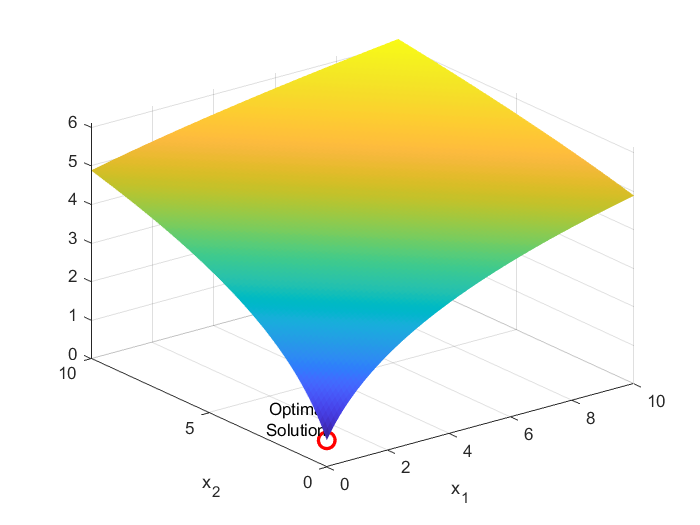
Example 31
Consider the following nonconvex nondifferentiable vector optimization problem
Note that . Let be defined as follows Now, for the considered nonconvex nondifferentiable multiobjective programming problem (VP1), we define its associated differentiable optimization problem (VP1E) as follows
Note that and is the set of all feasible solutions of the problem (VP1E). Further, note that all functions constituting the considered vector optimization problem (VP1) are -differentiable at . Then, it can also be shown that the -Karush-Kuhn-Tucker necessary optimality conditions (21)-(23) are fulfilled at with Lagrange multipliers , and . Further, it can be proved that is an -differentiable exponentially pseudo--invex function at on , the constraint function and are an -differentiable exponentially quasi--invex function at on . Hence, by Theorem 30, is an -Pareto solution of the optimization problem (VP).
Remark 32
Note that we are not able to use the optimality conditions for differentiable multiobjective programming problems in order to find efficient solutions in the vector optimization problem (VP1) considered in Example 31 since some of the involved functions are not differentiable. Also, the sufficient optimality conditions with convexity hypotheses are not applicable for (VP1) since (VP1) is not a convex vector optimization problem.
4 Concluding remarks
In this paper, a new class of nonconvex -differentiable vector optimization problems with both inequality and equality constraints have been considered. We have introduced the notion of exponentially -invex functions, delved into their key characteristics, and expanded the framework by introducing various generalized exponentially -invexity concepts. Further, we have established sufficient optimality conditions for -differentiable vector optimization problems under (generalized) exponentially -invexity. To illustrate these findings, we have provided an example of nonconvex nonsmooth vector optimization problems.
However, some interesting topics for further research remain. It would be of interest to investigate whether it is possible to prove similar results for other classes of -differentiable vector optimization problems. We shall investigate these questions in subsequent papers.
References
- [1] M.H. Alizadeh, M. Judit, On e-convexity, Miskolc Mathematical Notes, 23, 51-60, 2022.
- [2] M.H. Alizadeh, On e-convex functions and e-subdiferentials in locally convex spaces, Optimization, 72, 1347-1362, 2023.
- [3] G. Alirezaei, R. Mazhar, On exponentially concave functions and their impact in information theory, J. Inform. Theory Appl. 9, 265-274, 2018.
- [4] N. Abdulaleem, -invexity and generalized -invexity in -differentiable multiobjective programming, In ITM Web of Conferences (Vol. 24, p. 01002), EDP Sciences, 2019.
- [5] N. Abdulaleem, Wolfe E-duality for E-differentiable E-invex vector optimization problems with inequality and equality constraints, In 2018 International Conference on Applied Mathematics & Computational Science (ICAMCS. NET), IEEE, 156-1567, 2018.
- [6] N. Abdulaleem, --invexity in -differentiable multiobjective programming. Numerical Algebra, Control & Optimization, 12(2), (2022).
- [7] N. Abdulaleem, -univex sets, -univex functions and -differentiable -univex programming. Results Math 78, 3, 2023.
- [8] N. Abdulaleem, Optimality and duality for -differentiable multiobjective programming problems involving -type I functions. Journal of Industrial and Management Optimization, 19(2), 1513-1527, 2023.
- [9] N. Abdulaleem, -duality results for -differentiable -invex multiobjective programming problems, In Journal of Physics: Conference Series (Vol. 1294, No. 3, p. 032027). IOP Publishing, 2019.
- [10] M. Avriel, -convex functions, Math. Program., 2, 309-323, 1972.
- [11] B. Aghezzaf, M. Hachimi, Sufficient optimality conditions and duality in multiobjective optimization involving generalized convexity, Numer. Funct. Anal. Optim., 22, 775-788, 2006.
- [12] I. Ahmad, Sufficiency and duality in multiobjective programming with generalized -convexity, J. Appl. Anal., 11, 19-33, 2005.
- [13] A. Ben-Israel, B. Mond, What is invexity? Journal of Australian Mathematical Society Ser. B, 28, 1-9, 1986.
- [14] B.D. Craven, B.M. Glover, Invex functions and duality, Journal of Australian Mathematical Society Ser. A 39, 1-20, 1985.
- [15] C. Fulga, V. Preda, Nonlinear programming with -preinvex and local -preinvex functions, European J. Oper. Res., 192, 737-743, 2009.
- [16] M.A. Hanson, On sufficiency of the Kuhn-Tucker conditions, Journal of Mathematical Analysis and Applications, 80, 545-550, 1981.
- [17] M.A. Hanson, B. Mond, Necessary and sufficient conditions in constrained optimization, Mathematical Programming 37, 51-58, 1987
- [18] Q.J. Hu, J.B. Jian, H.Y. Zheng, C.M. Tang, Semilocal -convexity and semilocal -convex programming, Bull. Aust. Math. Soc., 75, 59-74, 2007.
- [19] A. Iqbal, I. Ahmad, S. Ali, Some properties of geodesic semi--convex functions, Nonlinear Anal. Theor., 74, 6805-6813, 2011.
- [20] A. Iqbal, S. Ali, I. Ahmad, On geodesic -convex sets, geodesic -convex functions and -epigraphs, J. Optim. Theory Appl., 155, 239-251, 2012.
- [21] V. Jeyakumar, B. Mond, On generalized convex mathematical programming, Journal of Australian Mathematical Society Ser. B 34, 43-53, 1992.
- [22] A. Kiliçman, W. Saleh, Some properties of geodesic semi --vex functions, Open Math., 13, 795-804, 2015.
- [23] P. Kanniappan, Necessary conditions for optimality of nondifferentiable convex multiobjective programming. Journal of Optimization Theory and Applications, 40(2), 167-174, 1983.
- [24] N. Kanzi, Constraint qualifications in semi-infinite systems and their applications in nonsmooth semi-infinite problems with mixed constraints, SIAM J. Optim., 24, 559-572, 2014.
- [25] N. Kanzi, M. Soleimani-Damaneh, Characterization of the weakly efficient solutions in nonsmooth quasiconvex multiobjective optimization, J. Global Optim., 77, 627-641, 2020.
- [26] AA. Megahed, HG. Gomaa, E.A. Youness, A.Z. El-Banna, Optimality conditions of -convex programming for an -differentiable function, J. Inequal. Appl., 2013, 246, 2013.
- [27] F. Mirzapour, Some properties on -convex and -quasi-convex funcions, The 18th Seminar on Mathematical Analysis and its Applications, 26-27, Farvardin, 1388, Tarbiat Moallem University, 178-181, 2009.
- [28] M.A. Noor, K.I. Noor, On exponentially convex functions, J. Orissa Math. Soc. ISSN, 975, 23-23, 2019.
- [29] M.A. Noor, K.I. Noor, Some properties of exponentially preinvex functions, FACTA Universit (NIS), Ser. Math. Inform., 34, 941-955, 2019.
- [30] M.A. Noor, K.I. Noor, Exponentially general convex functions, Trans. J. Math. Mech, 11, 141-153, 2019.
- [31] M.A. Noor, K.I. Noor, properties of some new classes of generalized exponentially convex functions, Appl. Math, 14, 627-633, 2020.
- [32] S. Nanda, On generalization of -convex and composite functions, Journal of Information and Optimization Sciences, 42(6), 1271-1282, 2021.
- [33] J. Pecaric, J. Jaksetic, On exponential convexity, Euler-Radau expansions and stolarsky means, Rad Hrvat, Matematicke Znanosti, 17(515), 81-94, 2013.
- [34] S. Pal, T. K. Wong, On exponentially concave functions and a new information geometry, Ann. Probab., 46, 1070-1113, 2018.
- [35] S. Treanţă, M. Arana-Jiménez, -pseudoinvex multidimensional control problem. Optimal Control Applications and Methods, 39(4), 1291-1300, 2018.
- [36] G.R. Piao, L. Jiao, Optimality and mixed duality in multiobjective -convex programming, J. Inequal. Appl., 2015, 335, 2015.
- [37] T. Weir, B. Mond, Proper efficiency and duality for vector valued optimization problems. Journal of the Australian Mathematical Society, 43(1), 21-34, 1987.
- [38] Y.R. Syau, E.S. Lee, Some properties of -convex functions, Appl. Math. Lett., 18, 1074-1080, 2005.
- [39] C. Singh, Optimality conditions in multiobjective differentiable programming. Journal of Optimization Theory and Applications, 53, 115-123, 1987
- [40] M. Soleimani-Damaneh, -convexity and its generalizations, Int. J. Comput. Math., 88, 3335-3349, 2011.
- [41] X.M. Yang, On -convex sets, -convex functions, and -convex programming, J. Optim. Theory Appl., 109, 699-704, 2001.
- [42] E.A. Youness, -convex sets, -convex functions, and -convex programming, J. Optim. Theory Appl. 102, 439-450, 1999.
- [43] T. Antczak, On -invex sets and functions, J. Math. Anal. Appl. 263, 355-379, 2001.
- [44] T. Antczak, N. Abdulaleem, Optimality and duality results for -differentiable multiobjective fractional programming problems under -convexity, J. Inequal. Appl., 2019, 1-24, 2019.