Extensions of Veech groups II: Hierarchical hyperbolicity and quasi-isometric rigidity
Abstract.
We show that for any lattice Veech group in the mapping class group of a closed surface , the associated –extension group is a hierarchically hyperbolic group. As a consequence, we prove that any such extension group is quasi-isometrically rigid.
1. Introduction
This paper studies geometric properties of surface group extensions and how these relate to their defining subgroups of mapping class groups. Let be a closed, connected, oriented surface of genus at least . Recall that a –extension of a group is a short exact sequence of the form
Such extensions are in bijective correspondence with monodromy homomorphisms from to the extended mapping class group of the surface. Alternatively, these groups are precisely the fundamental groups of –bundles.
Many advances in the study of mapping class groups have been motivated by a longstanding but incomplete analogy between hyperbolic space and the Teichmüller space of a surface. In the theory of Kleinian groups, a discrete group of isometries of is convex cocompact if it acts cocompactly on an invariant, convex subset. Farb and Mosher [FM02a] adapted this notion to mapping class groups by defining a subgroup to be convex cocompact if it acts cocompactly on a quasi-convex subset of . This has proven to be a fruitful concept with many interesting connections to, for example, the intrinsic geometry of the mapping class group [DT15, BBKL20], and its actions on the curve complex and the boundary of Teichmüller space [KL08a]. Most importantly, the work of Farb–Mosher [FM02a] and Hamenstädt [Ham] remarkably shows that an extension as above is word hyperbolic if and only if the associated monodromy has finite kernel and convex cocompact image (see also [MS12]).
For Kleinian groups, convex cocompactness is a special case of a more prevalent phenomenon called geometric finiteness, which roughly amounts to acting cocompactly on a convex subset minus horoballs invariant by parabolic subgroups. In [Mos06], Mosher suggested this notion should have an analogous framework in mapping class groups that would extend the geometric connection with surface bundles to a larger class of examples. The prototypical candidates for geometric finiteness are the lattice Veech subgroups; these are special punctured-surface subgroups of that arise naturally in the context of Teichmüller dynamics and whose corresponding –bundles are amenable to study via techniques from flat geometry.
Our prequel paper [DDLS21] initiated an analysis of the –extensions associated to lattice Veech subgroups, with the main result being that each such extension admits an action on a hyperbolic space that captures much of the geometry of . Building on that work, the first main result of this paper is the following, which provides a concrete answer to [Mos06, Problem 6.2] for lattice Veech groups.
Theorem 1.1.
For any lattice Veech subgroup , the associated –extension group of is a hierarchically hyperbolic group.
Hierarchical hyperbolicity means that in fact all the geometry of is robustly encoded by hyperbolic spaces. This is exactly the sort of relaxed hyperbolicity for –extensions that one hopes should follow from a good definition of geometric finiteness in . Thus Theorem 1.1 suggests a possible general theory of geometric finiteness, which we expound upon in §1.4 below.
Hierarchical hyperbolicity has many strong consequences, some of which are detailed in §1.1 below. It also enables, via tools from [BHS21], the proof of our second main result, which answers [Mos06, Problem 5.4]:
Theorem 1.2.
For any lattice Veech group , the associated –extension group of is quasi-isometrically rigid.
In [Mos06], Mosher in fact suggests an alternate approach to proving quasi-isometric rigidity that culminates in the formulation of Problem 5.4 of [Mos06] as an equivalent condition in this case. Both our proof and this alternate approach share a common key step of showing that quasi-isometries are coarsely fiber-preserving; for this we use tools from hierarchical hyperbolicity (see Proposition 5.4 below), whereas Mosher’s approach uses ideas from coarse algebraic topology appealing to the fact that is virtually free (see [FM00]). In §5.7 we give a rough sketch that carries out Mosher’s approach, drawing partly from his unpublished results in [Mos03], and leading to an alternate proof of Theorem 1.2.
It is our hope that the framework we develop for proving quasi-isometric rigidity for extension groups via hierarchical hyperbolicity will be applicable to a wider class of geometrically finite subgroups (§1.4), including those which may not be virtually free.
The rest of this introduction gives a more in-depth treatment of these results while elaborating on the concepts of, and connections between, hierarchical hyperbolicity, extensions of Veech groups, quasi-isometric rigidity, and geometric finiteness.
1.1. Hierarchical hyperbolicity
The notion of hierarchical hyperbolicity was defined by Behrstock, Hagen, and Sisto [BHS17b] and motivated by the seminal work of Masur and Minsky [MM00]. In short, it provides a framework and toolkit for understanding the coarse geometry of a space/group in terms of interrelated hyperbolic pieces. More precisely, a hierarchically hyperbolic space (HHS) structure on a metric space is a collection of hyperbolic spaces , arranged in a hierarchical fashion, in which any pair are nested , orthogonal , or transverse , along with Lipschitz projections to and between these spaces that together capture the coarse geometry of . A hierarchically hyperbolic group (HHG) is then an HHS structure on a group that is equivariant with respect to an appropriate action on the union of hyperbolic spaces . See §4 for details or [BHS17b, BHS19, Sis19] for many examples and further discussion.
Showing that a space/group is a hierarchically hyperbolic gives access to several results regarding, for example, a coarse median structure and quadratic isoperimetric function [Bow18, Bow13], asymptotic dimension [BHS17a], stable and quasiconvex subsets and subgroups [ABD21, RST18], quasiflats [BHS21], bordifications and automorphisms [DHS17], and quasi-isometric embeddings of nilpotent groups [BHS17b]. In particular, the following is an immediate consequence of Theorem 1.1.
Corollary 1.3.
Let be any lattice Veech group and the associated –extension group. Then:
As discussed in §1.2 below, further information about can be gleaned from the specific HHG structure constructed in proving Theorem 1.1. We note that the –maximal hyperbolic space of this structure, and thus the universal acylindrical action indicated in Corollary 1.3(2), is simply the space from [DDLS21].
1.2. The HHG structure on
In order to describe the HHG structure more precisely and explain its connection to quasi-isometric rigidity in Theorem 1.2, we must first recall some of the structure of Veech groups and their extensions. Let be a lattice Veech group and the associated extension group. First note that (up to finite index) is naturally the fundamental group of an –bundle over a compact surface with boundary (see §2 for details and notation). Each boundary component of is virtually the mapping torus of a multi-twist on , and is thus a graph manifold: the tori in the JSJ decomposition are suspensions of the multi-twist curves.
Graph manifolds admit HHS structures [BHS19] where the maximal hyperbolic space is the Bass–Serre tree dual to the JSJ decomposition, and all other hyperbolic spaces are either quasi-lines or quasi-trees (obtained by coning off the boundaries of the universal covers of the base orbifolds of the Seifert pieces). The stabilizers of the vertices of the Bass–Serre trees are called vertex subgroups, and are precisely the fundamental groups of the Seifert pieces of the JSJ decomposition. We let denote the disjoint union of the vertices of all Bass–Serre trees associated to the boundary components of the universal cover of this –bundle. Given , we say that these vertices are adjacent if they are connected by an edge in the same Bass-Serre tree.
The HHG structure on the extension group may now be described as follows:
Theorem 1.4.
Suppose is a lattice Veech group with extension group and let be representatives of the conjugacy classes of vertex subgroups. Then admits an HHG structure with the following set of hyperbolic spaces and relations among them (ignoring those of diameter ):
-
(1)
The maximal hyperbolic space is quasi-isometric to the Cayley graph of coned off along the cosets of [DDLS21].
-
(2)
There is a quasi-tree and a quasi-line , for each , and:
-
(a)
For all , .
-
(b)
For all , if and are adjacent, then and .
-
(c)
All other pairs are transverse.
-
(a)
This description of the HHG structure readily leads to further consequences for . For example, the maximal number of infinite-diameter pairwise orthogonal hyperbolic spaces is evidently . In view of [BHS17b, BHS21], we thus see that is as “close to hyperbolic” as possible in that its quasi-flats are at worst –dimensional:
Corollary 1.5.
Each top-dimensional quasi-flat in has dimension and is contained in a finite-radius neighborhood of finitely many cosets of vertex subgroups.
We note that quasiflats will be crucial for our proof of quasi-isometric rigidity, and we remark that the analogous statement for graph manifolds is due to Kapovich–Leeb [KL97].
Recall that an element of a group is a generalized loxodromic if it acts loxodromically under some acylindrical action on a hyperbolic space, and that a universal acylindrical action on a hyperbolic space is one in which every generalized loxodromic acts loxodromically [ABD21]. It is shown in [Sis16] that a generalized loxodromic element of a finitely generated group is necessarily Morse, meaning that in any finite-valence Cayley graph for the group, any –quasi-geodesic with endpoints in the cyclic subgroup stays within controlled distance of . While being Morse is, in general, strictly weaker than being generalized loxodromic, these conditions are in fact equivalent in HHGs [ABD21, Theorem B].
In the case of our extension group , it follows from Corollary 1.3(2) that the generalized loxodromics and Morse elements are precisely those elements acting loxodromically on . In [DDLS21, Theorem 1.1] we characterized these elements in terms of the vertex subgroups of , thus yielding the following:
Corollary 1.6.
Let be a lattice Veech group extension with vertex subgroups as in Theorem 1.4. The following are equivalent for an infinite order element :
-
•
is not conjugate into any of the vertex subgroups
-
•
is a generalized loxodromic element of
-
•
is a Morse element of .
1.3. Quasi-isometric rigidity
To state our rigidity theorem, first recall that is (up to finite index) the fundamental group of an -bundle over a compact surface with boundary. Here is a –invariant truncation of the universal –bundle over the Teichmüller disk stabilized by the Veech group . In particular, is quasi-isometric to . Let and denote the isometry and quasi-isometry groups of , respectively, and let denote the subgroup of isometries that map fibers to fibers.
Theorem 1.7.
There is an allowable truncation of such that the natural homomorphisms are all isomorphisms, and has finite index.
This is an analog, and indeed was motivated by, Farb and Mosher’s [FM02b] theorem that in the case of a surface group extension associated to a Schottky subgroup of , the natural homomorphism is injective with finite cokernel. This rigidity also leads to the following strong algebraic consequence:
Corollary 1.8.
If is any finitely generated group quasi-isometric to , then and are weakly commensurable.
In the statement, recall that two groups are weakly commensurable if there are finite normal subgroups so that the quotients have a pair of finite-index subgroups that are isomorphic to each other.
1.4. Motivation and Geometric Finiteness
Before outlining the paper and providing some ideas about the proofs, we provide some speculative discussion. For Kleinian groups—that is, discrete groups of isometries of hyperbolic –space—the notion of geometric finiteness is important in the deformation theory of hyperbolic –manifolds by the work of Ahlfors [Ahl66] and Greenberg [Gre66]. While the definition has many formulations (see [Mar74, Mas70, Thu86, Bow93]), roughly speaking a group is geometrically finite if it acts cocompactly on a convex subset of hyperbolic –space minus a collection of horoballs that are invariant by parabolic subgroups. When there are no parabolic subgroups, geometric finiteness reduces to convex cocompactness: a cocompact action on a convex subset of hyperbolic –space.
While there is no deformation theory for subgroups of mapping class groups, Farb and Mosher [FM02a] introduced a notion of convex cocompactness for in terms of the action on Teichmüller space . Their definition requires that acts cocompactly on a quasi-convex subset for the Teichmüller metric, while Kent and Leininger later proved a variety of equivalent formulations analogous to the Kleinian setting [KL07, KL08a, KL08b]. Farb and Mosher proved that convex cocompactness is equivalent to hyperbolicity of the associated extension group (with monodromy given by inclusion) when is virtually free. This equivalence was later proven in general by Hamenstädt [Ham] (see also Mj–Sardar [MS12]), though at the moment the only known examples are virtually free.
The coarse nature of Farb and Mosher’s formulation reflects the fact that the Teichmüller metric is far less well-behaved than that of hyperbolic –space. Quasi-convexity in the definition is meant to help with the lack of nice local behavior of the Teichmüller metric. It also helps with the global lack of Gromov hyperbolicity (see Masur–Wolf [MW95]), as cocompactness of the action ensures that the quasi-convex subset in the definition is Gromov hyperbolic (see Kent–Leininger [KL08a], Minsky [Min96b], and Rafi [Raf14]).
The inclusion of reducible/parabolic mapping classes in a subgroup brings the thin parts of into consideration; these subspaces contain higher rank quasi-flats and even exhibit aspects of positive curvature (see Minsky [Min96a]). This is a main reason why extending the notion of convex cocompactness to geometric finiteness is complicated. These complications are somewhat mitigated in the case of lattice Veech groups. Such subgroups are stabilizers of isometrically and totally geodesically embedded hyperbolic planes, called Teichmüller disks, that have finite area quotients. Thus, the intrinsic hyperbolic geometry agrees with the extrinsic Teichmüller geometry, and as a group of isometries of the hyperbolic plane, a lattice Veech group is geometrically finite. This is why these subgroups serve as a test case for geometric finiteness in the mapping class group. This is also why a subgroup of a Veech group is convex cocompact in if and only if it is convex cocompact as a group of isometries of the hyperbolic plane (which also happens if and only if it is finitely generated and contains no parabolic elements).
The action of on the curve graph, which is Gromov hyperbolic by work of Masur–Minsky [MM99], provides an additional model for these considerations. Specifically, convex cocompactness is equivalent to the orbit map to the curve graph being a quasi-isometric embedding with respect to the word metric from a finite generating set (see Kent–Leininger [KL08a] and Hamenstädt [Ham]). Viewing geometric finiteness as a kind of “relative convex cocompactness” for Kleinian groups suggests an interesting connection with the curve complex formulation. The connection is best illustrated by the following theorem of Tang [Tan19].
Theorem 1.9 (Tang).
For any lattice Veech group stabilizing a Teichmüller disk , there is a –equivariant quasi-isometric embedding , where is the path metric space obtained from by coning off the –invariant family of horoballs in which ventures into the thin parts of .
Farb [Far98] showed that non-cocompact lattices in the group of isometries of hyperbolic space are relatively hyperbolic relative to the parabolic subgroups. For Veech groups, the space is quasi-isometric to the (hyperbolic) coned off Cayley graph, illustrating (part of) the relative hyperbolicity of . We thus propose a kind of “qualified” notion of geometric finiteness with this in mind:
Definition 1.10 (Parabolic geometric finiteness).
A finitely generated subgroup is parabolically geometrically finite if is relatively hyperbolic, relative to a (possibly trivial) collection of subgroups , and
-
(1)
contains a finite index, abelian subgroup consisting entirely of multitwists, for each ; and
-
(2)
the coned off Cayley graph –equivariantly and quasi-isometrically embeds into .
When , we note that the condition is equivalent to being convex cocompact. By Theorem 1.9, lattice Veech groups are parabolically geometrically finite. In fact, Tang’s result is more general and implies that any finitely generated Veech group satisfies this definition. These examples are all virtually free, but other examples include the combination subgroups of Leininger–Reid [LR06], which are isomorphic to fundamental groups of closed surfaces of higher genus, and free products of higher rank abelian groups constructed by Loa [Loa21].
In view of Theorem 1.1, one might formulate the following.
Conjecture 1.11.
Let be parabolically geometrically finite. Then the –extension group of is a hierarchically hyperbolic group.
We view Definition 1.10 as only a qualified formulation because there are many subgroups of that are not relatively hyperbolic but are nevertheless candidates for being geometrically finite in some sense. It is possible that there are different types of geometric finiteness for subgroups of mapping class groups, with Definition 1.10 being among the most restrictive. Other notions might include an HHS structure on the subgroup which is compatible with the ambient one on (e.g., hierarchical quasiconvexity [BHS19]). From this perspective, some candidate subgroups that may be considered geometrically finite include:
-
•
the whole group ;
-
•
multi-curve stabilizers;
- •
-
•
free and amalgamated products of other examples.
Question 1.12.
For each example group above, is the associated extension a hierarchically hyperbolic group?
We note that the answer is ‘yes’ for the first example, since the extension group is the mapping class group of the surface with a puncture. Moreover, since our work on this subject first appeared, Russell [Rus21] addressed the second example by proving extensions of multicurve stabilizers are hierarchically hyperbolic groups.
1.5. Outline and proofs
Let us briefly outline the paper and comment on the main structure of the proofs. In §2 we review necessary background material and introduce the objects and notation that will be used throughout the paper. In particular, we define the spaces and , the latter being a quasi-isometric model for the Veech group extension , as well as the hyperbolic collapsed space . All of these were constructed in [DDLS21].
In §§3–4 we prove that the extension group is hierarchically hyperbolic by utilizing a combinatorial criterion from [BHMS20]. Besides hyperbolicity of , the other hard part of the criterion is an analogue of Bowditch’s fineness condition from the context of relative hyperbolicity. Its geometric interpretation is roughly that two cosets of vertex subgroups as above have bounded coarse intersection, aside from the “obvious” exception when the cosets correspond to vertices of the same Bass–Serre tree within distance 2 of each other. To this end, in §3 we associate to each vertex a spine bundle , which corresponds to a Seifert piece of the JSJ decomposition of the peripheral graph manifold, along with a pair of hyperbolic spaces and that will figure into the HHS structure on . The space is obtained via a quasimorphism constructed using the Seifert fibered structure following ideas in forthcoming work of the fourth author with Hagen, Russell, and Spriano [HRSS21], while is coarsely obtained by coning off boundary components of the universal covers of the base –orbifold of this Seifert fibered manifold. We then appeal to the flat geometry of the fibers of to construct and study certain projection maps
and prove that various pairs of subspaces of have bounded projection onto each other (Proposition 3.19).
In §4, we begin assembling the combinatorial objects necessary to apply the HHG criterion from [BHMS20], which involves both combinatorial and geometric aspects. The first step involves the construction of a natural flag complex containing the union of the Bass-Serre trees, together with appropriate “subjoins” with the union of all , over . Next, we use the geometry of to construct a certain graph whose vertices are maximal simplices of and on which acts metrically properly and coboundedly. The remainder of this section is devoted to verifying the necessary combinatorial conditions as well as translating the facts about and and the projections described above into proofs of the necessary geometric conditions. We note that in the combinatorial HHG setup, the complex comes with its own hierarchy projections between the induced hyperbolic spaces (Definitions 4.9–4.10), which may be different than the projections to and .
In §5 we prove our QI-rigidity result Theorem 1.7. The starting point is the hierarchical hyperbolicity of provided by Theorem 1.4, as it gives access to the results and arguments in [BHS21] about the preservation of quasi-isometrically embedded flats. Every collection of pairwise orthogonal hyperbolic spaces in an HHG determines a natural product subspace, with the maximal standard quasi-isometrically embedded flats (or orthants) arising inside such subspaces as products of quasi-lines in a maximal collection of pairwise orthogonal hyperbolic spaces of the HHG. Theorem A of [BHS21] states that a quasi-isometry of an HHS preserves the structure of its quasi-flats and takes any maximal quasi-flat within bounded Hausdorff distance of the union of standard maximal orthants. The maximal quasi-flats in the HHG structure on , namely the –dimensional flats indicated in Corollary 1.5, are encoded by certain strip bundles that, roughly, correspond to flats in the peripheral graph manifolds. We use the preservation of the maximal quasi-flats to derive coarse preservation of these strip bundles, which we then upgrade to coarse preservation of the fibers (§5.1). By using tools of flat geometry from [BL18, DELS18], we then show any quasi-isometry induces an affine homeomorphism of any fiber to itself (§§5.2–5.3) and moreover that this assignment is injective (§5.4). Finally, we show this association is an isomorphism by proving (§5.5) that every affine homeomorphism of a fiber induces an isometry and hence quasi-isometry of . Quasi-isometric rigidity and its algebraic consequence Corollary 1.8 are then easily obtained in §5.6.
Acknowledgments
The authors would like to thank MSRI and its Fall 2016 program on Geometric Group Theory, where this work began. We also gratefully acknowledge NSF grants DMS 1107452, 1107263, 1107367 (the GEAR Network) for supporting travel related to this project. Dowdall was partially supported by NSF grants DMS-1711089 and DMS-2005368. Durham was partially supported by NSF grant DMS-1906487. Leininger was partially supported by NSF grants DMS-1510034, DMS-1811518, and DMS-2106419. Sisto was partially supported by the Swiss National Science Foundation (grant #182186). The authors would like to thank the anonymous referee for their very helpful comments on the first version of this paper.
2. Setup: The groups and spaces
Here we briefly recall the basic set up from [DDLS21] which we will use throughout the remainder of the paper. We refer the reader to Sections 2 and 3 of that paper for details and precise references.
2.1. Flat metrics and Veech groups
Fix a closed surface of genus at least , a complex structures (viewed as a point in the Teichmüller space ), and a nonzero holomorphic quadratic differential on . Integrating a square root of determines preferred coordinates on for which defines a translation structure (in the complement of the isolated zeros of ). We also write for the associated flat metric defined by the half-translation structure (though the metric only determines the half-translation structure or quadratic differential up to a complex scalar multiple). This metric is a non-positively curved Euclidean cone metric, with cone singularities at the zeros of . The orbit of under the natural action on quadratic differentials projects to a Teichmüller disk, , which we equip with its Poincaré metric . The circle at infinity of is naturally identified with the projective space of directions, , in the tangent space of any nonsingular point of . For , we write for the singular foliation by geodesics in direction .
We assume that the associated Veech group is a lattice—recall that can be viewed as the stabilizer in the mapping class group of of as well as the affine group of , and the lattice assumption is equivalent to requiring the quotient orbifold to have finite –area. The parabolic fixed points in the circle at infinity form a subset we denote . This subset corresponds precisely to the completely periodic directions for the flat metric ; that is, the directions for which the foliation decomposes into cylinders foliated by –geodesic core circles. The boundaries of these cylinders are –saddle connections (–geodesic segments connecting pairs of cone points, with no cone points in their interior), and by the Veech Dichotomy, every saddle connection is in a direction in . We let denote any –invariant, –separated set of horoballs in and let
be the –invariant subspace obtained by removing these horoballs. We write for the induced path metric on . Finally, we let
be the –equivariant quotient obtained by collapsing each horoball to a point, for . There is a natural path metric on so that is –Lipschitz and is a local isometry at every point not in one of the horoballs.
We will also make use of the closest point projection to the horoball
for each .
2.2. The bundles and .
For each point , we let denote the associated flat metric or quadratic differential (defined up to scalar multiplication) on . The space of interest is a bundle over ,
for which the fiber over is naturally identified with the universal cover of , equipped with the pull-back complex structure and quadratic differential/flat metric . We write for .
For any , the Teichmüller map between these complex structures has initial and terminal quadratic differentials and (up to scalar multiple) and this map lifts to a canonical affine map between the fibers . These maps satisfy for all , and for any , assemble to a map defined by . Moreover, for any , is –bi-Lipschitz. We use the maps to identify for all .
The fiber over is denoted and the maps and are projections on the factors in a product structure . For , we write , which is just the slice in the product structure. The affine maps sends the cone points of to the cone points of . Consequently, the union of all singular points
is a locally finite union of disks , one for each .
We give the space a singular Riemannian metric which is the flat metric on each fiber and the Poincaré metric on each disk so that at each smooth point of intersection, the tangent planes are orthogonal. The singular locus of this metric is precisely . Each disk is isometrically embedded since is a –Lipschitz map, and hence restricts to an isometry . The metric on is in fact a locally homogeneous metric, modeled on a four-dimensional, Thurston-type geometry; see [DDLS21, §5].
The extension group acts on by bundle maps with the kernel of the projection to acting trivially on and by covering transformation on each fiber . We set , and write . When convenient to do so, we put “bars” over objects associated to or , e.g. , , etc. In particular, we write for the induced path metric on , induced from the metric on described above.
For any , the closest point projection has a useful “lift” , defined by
for any . That is, maps each fiber via the map to , where is the image of the closest point projection to of in .
2.3. The hyperbolic space
The quotient is the descent of a quotient which we now describe. First, for each , the foliation lifts to a foliation on in direction , and hence on any fiber by push-forward via the map , also in direction (via the identification ). There is a natural transverse measure coming from the flat metric on . Given , we fix some and let be the dual simplicial –tree to this measured foliation in direction on , and we let be the composition of the leafspace projection with the map .
Now we define to be the quotient space obtained by collapsing the subset to via for each . We also write . The maps and descend to the maps and , and the map determines maps and , which all fit into the following commutative diagram.
A metric on is determined by on and the map . The main facts about this metric are summarized in the following theorem; see [DDLS21, Theorem 1.1, Lemma 3.2].
Theorem 2.1.
There is a Gromov hyperbolic path metric on so that is –Lipschitz and is a local isometry at every point . Furthermore, for every ,
-
•
The induced path metric on is the –tree metric determined by the transverse measure on the foliation of in direction .
-
•
The subspace topology on agrees with the –tree topology on .
Remark 2.2.
The underlying simplicial tree is precisely the Bass-Serre tree dual to the splitting of defined by the cores of the cylinders of on .
For each , we denote the image of in by , which is obtained by collapsing to a point, for each . Consequently, is a bijection, and so each , with its path metric, is isometric to and isometrically embedded in . We call objects in , , and vertical if they are contained in a fiber of , , or , respectively, and horizontal if they are contained in , , or , for some .
2.4. Vertices, spines, and spine bundles
We will write for the union over all of all vertices of . We will simultaneously view as both a subset of and abstractly as an indexing set that will be used in sections §§3–4 to develop an HHS structure on . Since each vertex belongs to a unique tree, and since the trees are indexed by , we obtain a map so that is a vertex of . For convenience, we also write , , etc for each , and write for the –closest point projection .
For , we write if . Then define to be the combinatorial (integer valued) distance in the simplicial tree when (as opposed to the distance from the –tree metric) and to equal when .
Given , , and , the –spine in is the subspace
The –spine is the union of the saddle connections on the fiber in direction that project to by . When (and hence are adjacent in the same tree ) there is a unique component of whose closure is an infinite strip, , that covers a maximal cylinder in the quotient in the direction . We let be the union of and all such strips defined by with . We call the thickened –spine in . In the special case , we write and . Observe that the affine map maps and to and , respectively, for all . Finally, we write
These spaces are bundles over which we call, respectively, the –spine bundle and the thickened –spine bundle.
2.5. Schematic of the space and its important pieces.
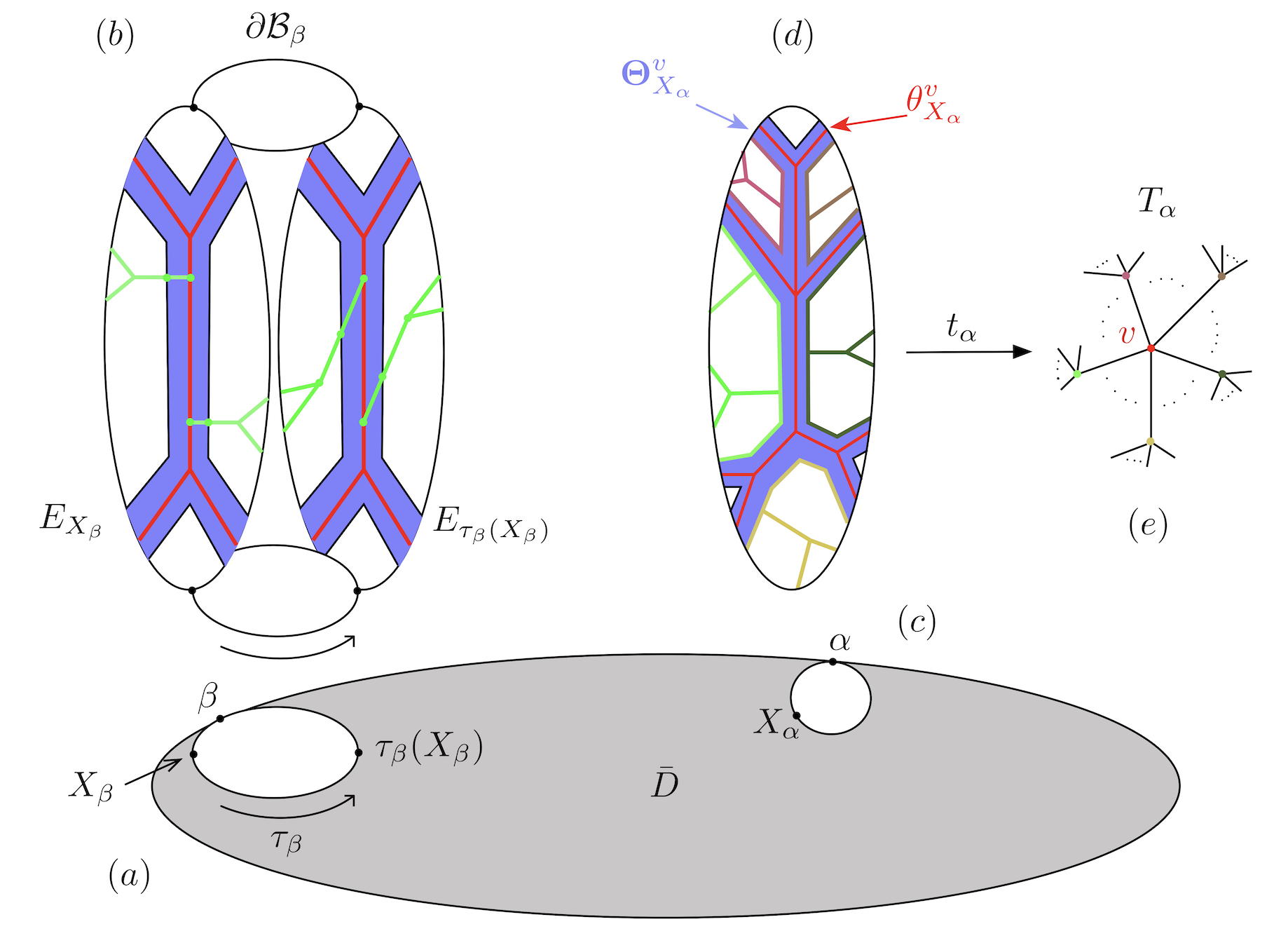
Figure 1 is a cartoon of the bundle over the truncated Teichmüller disk . We have tried to highlight some of the key features of which are relevant to this paper.
-
(a)
The stabilizer of a horoball based at a point is virtually cyclic, generated by a multitwist acting as a parabolic on . The base point on the horocycle based at and its image are shown.
-
(b)
The bundle over the boundary horocycle based at is shown. This is the universal cover, , of a graph manifold which is the mapping torus of . Two fibers and are shown with the effect on a part of a spine (in green) in some other direction illustrating the sheering in strips after applying .
-
(c)
This is another horoball in some direction , with the chosen basepoint and its horocycle .
-
(d)
The spine in direction is shown in red, corresponding to a vertex . The thickened spine is indicated in lavender. Spines for vertices of adjacent to meet along lines in and are shown in various other colors.
-
(e)
The restriction of to collapses each spine or strip in direction to the corresponding vertex or edge the Bass-Serre tree . The space is formed by collapsing to via .
2.6. Some technical lemmas and coarse geometry
Here we briefly recall some basic facts about the setup above proved in [DDLS21] as well as some useful coarse geometric facts. The first fact is the following; see [DDLS21, Lemma 3.4].
Lemma 2.3.
There exists a constant such that for each and , every saddle connection in has length at most and every strip in has width at most . In particular, for points , the saddle connections and strips of in direction have, respectively, uniformly bounded lengths and widths.
Every connected graph can be made into a geodesic metric space by locally isometrically identifying each edge with a unit interval. We will need the following well-known result (for a proof of this version, see [DDLS21, Proposition 2.1]).
Proposition 2.4.
Let be a path metric space and an –dense subset for some . For any , consider a graph with vertex set such that:
-
•
all pairs of elements of within distance are joined by an edge in ,
-
•
if an edge in joins points , then .
Then the inclusion of into extends to a quasi-isometry .
The following criterion for a graph to be a quasi-tree is well-known, and an easy consequence of Manning’s bottleneck criterion [Man05]. We include a proof for completeness.
Proposition 2.5.
Let be a graph, and suppose that there exists a constant with the following property: For each pair of vertices there exists an edge path from to so that for any vertex on , any path from to intersects the ball of radius around . Then is quasi-isometric to a tree, with quasi-isometry constants depending on only.
Proof.
We check that [Man05, Theorem 4.6] applies; that is, we check the following property. For any two vertices , there is a midpoint between and so that any path from to passes within distance of . (The uniformity in the quasi-isometry comes from the proof of Manning’s theorem, see [Man05, page 1170].)
Consider any geodesic from to , and let be its midpoint. We will show that lies within distance of a vertex of , so that we can take .
Indeed, suppose by contradiction that this is not the case. Let be the vertices of (in the order in which they appear along ), and let , so that . Each lies within distance of some point on which must satisfy . In particular, we have that every satisfies either or . Since and , we cannot have for all , a contradiction. ∎
We end with a few definitions from coarse geometry which may not be completely standard, but will appear in the next two sections. Given two metrics and on a set , we say that is coarsely bounded by if there exists a monotone function so that , for all . If is coarsely bounded by and is coarsely bounded by , we say that and are coarsely equivalent. An isometric action of a group on a metric space is metrically proper if for any and any point , there are at most finitely many elements for which . For proper geodesic spaces, this is equivalent to acting properly discontinuously. If there exists so that , then we say that the action is cobounded, and for proper geodesic metric spaces this is equivalent to acting cocompactly.
3. Projections and vertex spaces
An HHS structure on a metric space consists of certain additional data, most importantly a collection of hyperbolic spaces together with projection maps to each space. For the HHS structure that we will build on (Cayley graphs of) , the hyperbolic spaces will (up to quasi-isometry) be the space from [DDLS21] (see §2.3) and the spaces and introduced in this section, where varies over all vertices of the trees . Morally, the projections will be given by the maps and that we study below. However, to prove hierarchical hyperbolicity we will use a criterion from [BHMS20] which does not require actually defining projections, but nevertheless provides them. Still, the maps and will play a crucial role in proving this criterion applies.
We will establish properties of and that are reminiscent of subsurface projections or of closest-point projections to peripheral sets in relatively hyperbolic spaces/groups; these are summarized in Proposition 3.19. Essentially, these same properties would be needed if we wanted to construct an HHS structure on directly without using [BHMS20].
From a technical point of view, we would like to draw attention to Lemma 3.13, which is the crucial lemma that ensures that the projections behave as desired and that various subspaces have bounded projections. Roughly, the lemma says that closest-point projections to a spine do not vary much under affine deformations.
In what follows, we will write and for the path metrics on and induced from . Using the map , it is straightforward to see that is uniformly coarsely equivalent to the subspace metric from : in fact, . The same is true for , which follows from the fact that the inclusion of into is a quasi-isometric embedding with respect to the path metrics (see below).
Associated to each we will be considering two types of projections. These projections have a single projection as a common ingredient. It is convenient to analyze via an auxiliary map which serves as a kind of fiberwise closest point projection that survives affine deformations, and which we call the window map. We describe the two types of projections restricted to , as well as the target spaces of said projections, in §3.1 and §3.3, where we also explain some of their basic features. Next we define the window map and prove what is needed from it. Finally, we define and prove the key properties of the associated projections.
3.1. Quasimorphism distances
For each , we will use ideas from work-in-progress of the fourth author with Hagen, Russell, and Spriano [HRSS21] to define a map
where is a discrete set quasi-isometric to . The key properties of this map are given by the next proposition. We note that the proposition and Lemma 3.6 can be used as black-boxes (in particular, the definitions of and are never used after we prove those results).
Proposition 3.1.
There exists such that, for each , there exist a space that is –quasi-isometric to and a map satisfying the following properties:
-
(1)
is –coarsely Lipschitz with respect to the path metric on .
-
(2)
For any , if then is a set of diameter bounded by .
-
(3)
For any with , is a –coarsely surjective –quasi-isometry with respect to the induced path metric on the domain.
-
(4)
(Equivariance) For any and there is an isometry and for all we have .
The sets in item (2) are certain lines whose significance is explained below.
Remark 3.2.
An earlier version of this paper used work of Kapovich and Leeb to construct the spaces and maps , resulting in a weaker version of this proposition which did not include the last, equivariance condition. Consequently could only be shown to be an HHS, rather than an HHG. The ideas from [HRSS21] were crucial in this extension.
To explain the proof of the proposition, it is useful to review some background on graph manifolds, which we do now.
Graph manifolds and trees
Recall that a graph manifold is a –manifold that contains a canonical finite union of tori (up to isotopy), so that cutting along the tori produces a disjoint union of Seifert fibered –manifolds, called the Seifert pieces. Seifert fibered –manifolds are compact –manifolds foliated by circle leaves; see [JS79].
The universal cover of a graph manifold decomposes into a union of universal covers of the Seifert pieces glued together along –planes (covering the tori). The decomposition is dual to a tree, and the universal covers of the Seifert pieces are the vertex spaces. For any Seifert fibered space, its universal cover is foliated by lines, the lift of the foliation by circles, and we refer to the leaves simply as lines in the universal cover.
Horocycles and bundles
Next we describe the specific graph manifolds that are relevant for our purposes.
Let denote the stabilizer of , for each . This has a finite index cyclic subgroup generated by a multitwist, ; see e.g. [DDLS21, §2.9]. The preimage of in is the –extension group of , and we likewise denote by the extension group of . The action of on is cocompact, and has a finite sheeted (orbifold) covering by , which is the graph manifold mentioned in the introduction.
Consider the surface with the flat metric , so that . The multitwist is an affine map that preserves the cylinders in direction , acting as a power of a Dehn twist in each cylinder and as the identity on their boundaries. The union of the boundaries of the cylinders are spines (deformation retracts) for the subsurfaces that are the complements of the twisting curves (core curves of the cylinders). Consequently, is the identity on these spines. The homeomorphism induces a homeomorphism on the subsurface obtained by cutting open along a core curve of each cylinder. Each such induced homeomorphism is the identity on the corresponding spine, and is thus isotopic to the identity relative to the spine; see Figure 2. The mapping torus of each subsurface is a product of the subsurface times a circle, and embeds in the the mapping torus of . These sub-mapping tori are the Seifert pieces for the graph manifold structure on .
The lifted graph manifold decomposition of corresponds to . That is, for each , there is a vertex space contained in and containing . In fact, with respect to the covering group, is an invariant, bounded neighborhood of the vertex space and is an equivariant deformation retraction of that space. We let denote the stabilizer of in and the stabilizer in . The suspension flow on the mapping torus restricted to each quotient of the spine bundle, , defines circle leaves of the corresponding Seifert piece; that is, flow lines through any point on the are precisely the circle leaves. In the universal covering , the lifted flowline through a point is a lifted horocycle, . Thus, for any vertex and any , is a line for the vertex space corresponding to . We note that not only does preserve this set of lines, but so does .
For any , the stabilizer in of is generated by a lift of . Therefore, the quotient is homeomorphic to a product, , where is the stabilizer of in and is any point. Indeed, there is a deformation retraction to . If we do not care about the particular point over which we take the fiber, we simply write for the surface , so that . Since is a copy of the universal cover of , we can consider as a subsurface of (embedded on the interior) and is its fundamental group inside (up to conjugacy).
The product structure can be chosen so that is an orbifold cover sending circles to circles making into a Seifert fibered orbifold (some of the Seifert fibers may be part of the orbifold locus) that also (orbifold)-fibers over the circle (with finite order monodromy). Write for the Seifert fibration to the quotient –orbifold. Further write
for the induced homomorphism of the Seifert fibration and
for the induced homomorphism from the fibration over the circle. Because acts as translation on the line for , it represents a loop that traverses a circle in the Seifert fibration, which is thus also a suspension flowline for the fibration over the circle. Thus we have and . To complete the picture, we note that restricting to defines an orbifold covering .
Finally, note that for any adjacent to in , has finite index in . Viewing , we note that is an isomorphism onto an infinite cyclic subgroup of . In fact, the image is (a conjugate of a power of) the fundamental group of a boundary component of .
Remark 3.3.
One caveat about the lines for the vertex spaces: flowlines through points not on a spine are not lines of any vertex space. In fact, they are not even uniformly close to lines for any vertex space.
Constructing the map
Here we define and and prove the main properties we will need about them. We require a little more set up first. We choose representatives of the –orbits of vertices, . For each , choose a fundamental domain for the action of on . We assume that has compact, connected closure, that for all , and that . The set
| (1) |
is a finite generating set for . The –translates of define a tiling of , and the map sending every point of to is a quasi-isometry by the Milnor-Schwarz Lemma. We denote this map as .
We note that any word metric on defines a “word metric” on each coset , for (elements are distance if they differ by right multiplication by an element of the generating set). We can push the tiling forward by to a –invariant tiling of (if , this is precisely the given tiling of ). For any element , the map that sends every point in to defines a quasi-isometry which is –equivariant, with the same quasi-isometry constants. If and , then for all
On the other hand, any and have the form and for some and . Thus, for any , the equation above becomes
| (2) |
Having carried out the construction above for each and each vertex in its orbit, we have maps from to a coset of a vertex stabilizer from for every , so that equation (2) holds for every , and .
Next, recall that a homogeneous quasimorphism (with deficiency ) from a group to is a map
such that for all and we have and
Lemma 3.4.
For any , there is a homogeneous quasimorphism such that is unbounded, and for any adjacent vertex .
Proof.
Let be –orbit representatives of the vertices adjacent to . Here is the number of boundary components of , so that are peripheral loops around the distinct boundary components of . Since is the fundamental group of a hyperbolic –orbifold with non-empty boundary, appealing to [HO13, Theorem 4.2], which applies to and its subgroups in view of [DGO17, Corollary 6.6, Theorem 6.8], one can find a homogeneous quasimorphism , for , such that and for . (The construction of Epstein–Fujiwara [EF97] should also be applicable to construct such quasimorphisms). Set , and for each , set , and then define
As a linear combination of homogeneous quasimorphisms, is a homogeneous quasimorphism. Since , it follows that for all , hence . On the other hand, for any we have
proving the lemma. ∎
According to [ABO19, Lemma 4.15], there is an (infinite) generating set for so that with respect to the resulting word metric, the quasimorphism from Lemma 3.4 is a quasi-isometry. For , define with this choice of word metric and let
simply be the map (followed by the identification of with ). For any , define to be the coset with this generating set so that defines a map
Carrying this out for every , (2) implies
| (3) |
for all and , and .
Before we proceed to the proof of Proposition 3.1, observe that acts isometrically on with respect to any generating set, and thus we can use this to define a generating set for the conjugate so that (any) orbit map is an isometry; in fact, this will just be a conjugate of the generating set for . In particular, when convenient we will identify isometrically with the conjugate via such an orbit map. Conjugating the quasimorphisms from the lemma, for , we obtain uniform quasi-isometries
| (4) |
for all , which for an appropriate choice of identification of with a conjugate of some , , is a quasimorphism (with uniformly bounded deficiency).
Proof of Proposition 3.1.
From the discussion above and Equation (3), we immediately see that item (4) of the proposition holds.
Next, observe that by adding finitely many generators to the infinite generating set of for any , changes by quasi-isometry. On the other hand, the finite generating set described in Equation (1) for makes a quasi-isometry. Thus, adding these generators to the infinite generating set does not change the quasi-isometry type of , but clearly makes coarsely Lipschitz. Therefore, is uniformly coarsely Lipschitz for all , and hence item (1) holds for all .
To prove item (2), let and . Then , for some adjacent to . As discussed above, we view and as conjugates and of groups and , respectively, for , equipped with their conjugated infinite generating sets. Let and be the associated uniform quasi-isometric homogeneous quasimorphisms. The element stabilizes acting by translation on it, and by construction, for all . It follows that every orbit of acting on is uniformly bounded. Indeed, if is the deficiency of , then for any , we have
and therefore and are uniformly bounded distance apart in (since is a uniform quasiisometry).
Now, since , by item (4) of the proposition we have
and since is uniformly close to , it follows that sends the –orbit of to a uniformly bounded set. Since this orbit is –dense in for some uniform , and since is uniformly coarsely Lipschitz (by item (1)) we see that has uniformly bounded diameter. This proves item (2).
For item (3), we continue with the assumptions on as above. Note that since , using again the fact that is a uniform quasi-isometric homogeneous quasimorphism to , it follows that for any , the map is a uniformly coarsely surjective, uniform quasiisometry . Since every orbit of on is uniformly bounded, it follows that for all , the two points and are uniformly close to each other. Likewise, and are also uniformly close to each other. But this means that
are uniformly close, and thus
is a uniformly coarsely surjective, uniform quasiisometry .
On the other hand, the assignment defines a uniform quasiisometry since acts cocompactly on (with uniformity coming from the fact that there are only finitely many –orbits of pairs of adjacent vertices). Combining these two facts, together with the fact that and are uniformly coarsely Lipschitz, it follows that
is a uniformly coarsely surjective, uniform quasiisometry. This proves item (3), and completes the proof of the proposition. ∎
3.2. A technical lemma
The goal of this subsection is to prove Lemma 3.6, whose relevance will only be clear in §4. We prove it here since we have now established the setup for its proof.
We recall that for each , since is a Seifert fibered orbifold, we have have a –equivariant, uniformly biLipschitz homeomorphism , where is the (simply connected) surface-with-boundary for some (and ) and the slices (more precisely, the level sets of ) are lines for . These lines project to circle fibers in and we may assume they contain all the lines for all .
Lemma 3.5.
The map is a uniform, –equivariant quasi-isometry with uniformly dense image. Moreover, the constant from Proposition 3.1 can be chosen so that for any and , the subspace
has the property that has uniformly bounded Hausdorff distance to the slice , and furthermore nontrivially intersects every line of .
We note that the intersection of with each line of is necessarily a uniformly bounded diameter set by the uniform bounded Hausdorff distance condition.
Proof.
All constants will be independent of the specific vertex , so we drop it from the notation. We write for all path-metric distances in what follows (the location of points will determine which metric is being used). Products are given the metric for convenience. We further let be the maximum of the coarse Lipschitz constants of and the biLipschitz constant of , and assume, as we may, that . From the proof of Proposition 3.1(3), if is any point of a line of , then is a uniformly coarsely surjective, uniform quasi-isometry from to . Therefore, is a uniformly coarsely surjective, uniform quasi-isometry from any line of to . We further assume that the coarse surjectivity constants and quasi-isometry constants are also all taken to be .
Let be any two points. Since and are –coarsely Lipschitz, is –coarsely Lipschitz. To prove the required uniform lower bound on –distances, we note that since is a –biLipschitz homeomorphism, it suffices to uniformly coarsely bound from above by . For reasons that will become clear shortly, we observe that
| (5) | |||||
If the maximum is realized by , then note that
as required.
We are left to consider the case that the maximum in (5) is realized by , which thus satisfies
Let be such that and . Since , and lie on a line, and since the restriction of to this line is a –quasi-isometry, we have
Since is –coarsely Lipschitz and is –biLipschitz, we have
Combining the previous two sets of inequalities and the triangle inequality, we have
Combining this inequality with (5) where we have assumed the maximum is realized by , we obtain
which provides the required upper bound. This completes the proof of the first claim of the lemma.
For the second claim of the lemma, we now increase from Proposition 3.1 if necessary, so that . Observe that
| (6) |
That is, sends the line to , for any . As already noted at the start of the proof, restricting to this line, is –coarsely Lipschitz and –coarsely onto. Therefore, for any and , there exists so that is within of . Thus, for any line of , the –image nontrivially intersects , and hence this line nontrivially intersects . By definition, maps into , and by the previous sentence, every point of is within of some point of . Thus, has Hausdorff distance at most from , as required. ∎
As mentioned above, the following technical lemma will be needed in §4. In the statement is as defined by Lemma 3.5.
Lemma 3.6.
There is a function with the following property. Suppose that are so that . Then for each and we have
Proof.
It suffices to prove the lemma with replaced by the path metric on , since they are uniformly coarsely equivalent. In fact, it will be convenient to consider the path metric on the union of the three vertex subspaces
which is also uniformly coarsely equivalent since each vertex space uniformly quasi-isometrically embeds in . In this subspace, we will actually prove that the two distances are uniformly comparable.
Now, for each the uniform quasi-isometry from Lemma 3.5 maps the space within bounded Hausdorff distance of a subspace , for a boundary component of . Let be the closest point projection, and then set
where is a coarse inverse of with (c.f. Equation (6)). This map is a uniformly coarsely Lipschitz, coarse retraction of onto . Moreover, this sends , which is uniformly close to the –image of , to a uniformly bounded neighborhood of . Consequently,
| (7) |
with uniform constants.
Next, observe that .
Claim 3.7.
The quasi-isometry maps within a uniformly bounded Hausdorff distance of the slice , for each , where is a point in the –image of .
Assuming the claim, we note then that
again with uniform constants. Combining this coarse equation with (7) we get the required uniform estimate
Fix or and we prove the claim. Since is –coarsely surjective (Proposition 3.1(3), there exists some point with within distance of . Therefore, and we set .
Next, we observe that is uniformly coarsely constant on any line of contained in by Proposition 3.1(2) and uniformly coarsely Lipschitz by Proposition 3.1(1). Hence, the line
of maps under into a neighborhood of uniformly bounded radius of . Therefore, any point in the image of the line in lies uniformly close to a point in by Proposition 3.1(3) (which guarantees that any point in is –close to a point in the image of the subspace ). Therefore any point in the line lies uniformly close to some point in since is a uniform quasi-isometry again by Proposition 3.1(3).
On the other hand, Lemma 3.5 implies is uniformly bounded Hausdorff distance from the slice . Moreover, since meets every line of (Lemma 3.5 again), it follows that
is uniformly bounded Hausdorff distance to the quasi-line (see the proof of Lemma 3.5). In particular, is itself a uniform quasi-line and consequently lies within a uniformly bounded neighborhood of the line . Since this line maps within within a uniformly bounded Hausdorff distance of the slice in by , we see that does as well ∎
3.3. Coned-off surfaces
For , we define to be the graph whose vertices are all so that , and with edges connecting the pairs whenever . As such, vertices are in bijective correspondence with the boundary components of and there is an “inclusion” map
that sends any point to the vertex for which . In light of the following lemma, we note that we could alternately define the edges of in terms of subspaces lying within bounded distance of each other, and produce a space quasi-isometric to .
Lemma 3.8.
There is a function so that whenever satisfy , the sets and may be connected via a concatenation of at most paths, each of which is contained in a set of the form .
Proof.
If , then there are cone points within distance , where is the bound on the width of a strip and length of a saddle connection from Lemma 2.3. Since the path metric on is coarsely equivalent to the subspace metric, is bounded in terms of . The path metric on is biLipschitz equivalent to the –metric on the product . Since each edge of has definite length, there is a path from to in obtained by concatenating boundedly many (in terms of ) paths with a saddle connection in . Since each is contained in some , we are done. ∎
Corollary 3.9.
For any , we have .
Proof.
Let and . Since and are path metrics, we have . By Lemma 3.8, and may be joined by a concatenation of paths each of which lies in some , and where and . For successive paths , the vertices are adjacent in by definition. Therefore . ∎
Lemma 3.10.
Each is uniformly quasi-isometric to a tree. In particular, there exists so that each is –hyperbolic. Moreover, has at least two points at infinity.
Proof.
We appeal to Proposition 2.5 and show that for any vertices of there exists a path so that any path from to passes within distance of each vertex of .
First, note that is isomorphic to the intersection graph of the collection of strips in . For each strip we have a vertex, and for each saddle connection of the spine , there is an edge of that connects the vertices corresponding to the strips that contain the saddle connection. For each cone point in the spine , there is also a complete graph on the vertices corresponding to strips that contain this cone point. This accounts for all edges (because intersections of strips either arise along saddle connections or single cone points), and we note that the closure of each edge of the first type separates into two components.
Suppose are two vertices, and let be points in the (boundaries of the) strips corresponding to and , respectively, that are closest in , and consider the geodesic in connecting these points, which is a concatenation of saddle connections . For each , let be the vertices corresponding to the two strips that intersect in the saddle connection . We can form an edge path in , containing , and the as vertices, since . Observe that any path from to must pass through the union , for each , since and lie in the closures of distinct components of .
Now let be the vertices of an edge path connecting to in . For any points in the strips corresponding to and , respectively, it is easy to construct a path in between these points that decomposes as a concatenation so that is contained entirely in the strip corresponding to . From the previous paragraph, this path must pass through , for each . It follows that for each , the edge path must meet the union of the stars . Since these stars intersect, their union has diameter at most , and we are done.
We now show that contains a quasi-geodesic line. Consider strips of , for , such that for all we have
-
•
and share a saddle connection;
-
•
and lie on distinct components of the complement of the interior of in .
The give a bi-infinite path in , and we now show that this path is a quasi-geodesic. Fix integers and consider a geodesic in from to (where we think of the strips themselves as vertices of for convenience). Then for each we have that needs to contain a vertex which, regarded as a strip, intersects or . Indeed, the interior of separates from , and the sequence of vertices of corresponds to a connected union of strips containing and . Moreover, there is no strip intersecting both and if , and in particular we have if . These observations imply that contains at least vertices, so that geodesics connecting to have length comparable to , and the form a quasi-geodesic line as required. ∎
3.4. Windows and bridges
Recall that and are the sets of all singular points in all fibers in and , respectively; see §2.2. For , consider the set of points in that are inside some –spine, as well as those points that are outside every –spine:
For each we now define a window map from cone points to the set of subsets of the boundary . There are two cases. Firstly,
In words, is the union of entrance points in of any flat geodesic in from to (basically the closest point projection in ), and we call it the window for in . Observe that for any we have . The second case, that of , is handled slightly differently:
Thus affine invariance is built directly into the definition.
Now for any and , we define
where the distance is computed in the path metric on (or equivalently on ). Finally, we extend window maps to arbitrary subsets by declaring
which has the same effect as defining for .
Lemma 3.11.
If satisfy , then for all .
Recall that .
Proof.
This is immediate since if and only if for all , and is defined just in terms of . ∎
The following gives a counterpoint to Lemma 3.11 for points in .
Lemma 3.12.
There exists such that for any the following holds: If satisfy and either
-
(1)
and are connected by a horizontal geodesic of length , or
-
(2)
and are contained in for some with ,
then , where .
Proof.
Set and . Since is –Lipschitz and is uniformly bounded for all such , either condition (1) or (2) gives a uniform bound on the distance between and . Hence is –biLipschitz. The distance between and its closest cone points in is also uniformly bounded by , by Lemma 2.3. The same holds for the distance between and . It follows that lies within distance of and hence within distance of . ∎
The next lemma explains that the image of is not so far from being a point.
Lemma 3.13 (Window lemma).
For any , , and , the window is either a cone point or a single saddle connection.
Proof.
Recall that each cone point in the flat surface has total angle at least , and that is a unique geodesic space in which a concatenation of saddle connections is geodesic if and only if successive saddle connections subtend an angle of at least on each side.
If then clearly is the cone point itself. So suppose and let be the component of separating from in , so that . Take any flat geodesic in from to a cone point . The geodesic is a concatenation of saddle connections and first meets in some cone point . Since the total cone angle at is at least and the angle at along the side of containing is exactly , the last saddle connection in the geodesic must make an angle of at least with one of the two halves of determined by . It follows that concatenating with that half of gives an infinite geodesic ray in . Hence, by uniqueness of geodesics, the geodesic from to any cone point on that side of evidently passes through .
If both angles between and at are at least , then any geodesic from to passes through . Hence is the unique point in closest to and is a cone point as required. Otherwise, consider the flat geodesic from to the adjacent cone point on the other side of along . The last saddle connection of this geodesic must also make an angle with of at least on one side. This cannot be the side containing , or else the geodesic from to would pass through contradicting our choice of . Hence any geodesic from to a cone point on the opposite side of must pass through . Therefore is the saddle connection between and , and we are done. See Figure 3. ∎
The following lemma gives us partial control over the window for points in adjacent vertex spaces in the same Bass–Serre tree.
Lemma 3.14 (Bridge lemma).
For any with , any , and any component not containing , there exists a (possibly degenerate) saddle connection with the following property: Every with satisfies .
We call the bridge for in . It is clear from the construction in the proof below that is the bridge for , for any .
Proof.
Let be as in the statement and be the component of containing . Let and , which are both bi-infinite flat geodesics in .
If , then there is a unique geodesic between them in , and we take to be the endpoint of this geodesic which lies along . On the other hand, if , then their intersection is contained in the boundary of a strip along and another along . Two distinct strips in the same direction that intersect do so in either a single point or a single saddle connection, and hence is a point or single saddle connection, and we call . See Figure 4.
Now consider any point with . Observe that so that falls under the first case of the window definition. Further, any flat geodesic from to must pass through both and , and hence must pass through . It follows that , as required. ∎
The following is an easy consequence of the previous lemma.
Corollary 3.15.
For any with and , there exists a (possibly degenerate) saddle connection so that if has , then . In particular, .
Proof.
There exists between and with , and a component whose closure contains . Setting and applying Lemma 3.14 completes the proof. ∎
The next corollary is similar.
Corollary 3.16.
If satisfy and , then for each there is a connected union of at most two saddle connections such that for all . In particular .
Proof.
From the hypotheses, is contained in some component . Let be such that and . Since , and can intersect in at most one point. If , then is contained in a component of disjoint from ; thus is contained in the bridge for by Lemma 3.14. Otherwise , and we claim there is a cone point such that for every component of that intersects . Indeed, if is a cone point, we take to be this intersection point, and if not is an interior point of a saddle connection of and we may take to be either of its endpoints. For each component that intersects we then have , where is the bridge for . Since is contained in the union of the closures of such , it follows that is contained in a union of saddle connections along , all of which contain , and hence is a connected union of at most two saddle connections. This completes the proof. ∎
The final case to consider is that of spines in different directions that intersect:
Lemma 3.17.
There exists such that if with and , then for all .
Proof.
Let be the unique intersection point of the spines. Let be the smallest subgraph of containing and let be the closures of the components of , so that . See Figure 5. For , let be the closest (cone) point to . Then define to be the intersection of the geodesic with and let be the segment consisting of the ( or ) saddle connections along that contain . Define , and note that and by construction.
For any with , where , the flat geodesic from to first intersects at ; therefore by definition of the window. By Lemma 3.13, it follows that . The union contains every cone point of except possibly . Thus we have proven .
Let be the closest point on to , thus lies on the unique hyperbolic geodesic that intersects and orthogonally. In the directions and are perpendicular. Therefore the cone points of that are closest to all lie in , since they must be endpoints of saddle connections along that intersect . More generally, for any , the directions and are nearly perpendicular and thus we have
for some uniform constant that depends only on the length of and the maximum over of the length/width of any saddle connection/strip in the direction (Lemma 2.3). Now, for any , the point lies in and we have that . The above equation shows there are cone points of within of ; hence lies in by definition. Using the fact that the length of is uniformly bounded, we see that the map is uniformly biLipschitz and therefore that lies within bounded distance of . Combining this with the above finding that lies within bounded distance of , we finally conclude that is uniformly bounded. ∎
3.5. Projections
Here we define projections and . In preparation, we first define by
In words, consists of the –windows of in all fibers over . As before, we extend to arbitrary subsets by setting .
Now, for each our projections are defined as the compositions
A useful observation is that for any two vertices with and , we have
| (8) |
Mirroring the notation above, for we define
Lemma 3.18.
There is a function such that for all , , and the quantities and are at most .
Proof.
For , let us compare the images of some subset and
under the maps . Since the boundary components of are preserved by the maps , the images are exactly the same. Moreover, for each we have , and so by Proposition 3.1(2) this is a set with diameter at most . Therefore and have Hausdorff distance at most .
Proposition 3.19.
There exists so that for any :
-
(1)
and are –coarsely Lipschitz;
-
(2)
For any , we have
-
(a)
, unless ;
-
(b)
unless .
-
(a)
Proof.
For part (1), we first observe that by [DDLS21, Lemma 3.5], there exists an so that any pair of points may be connected by a path of length at most that is a concatenation of at most pieces, each of which is either a saddle connection of length at most in a vertical vertical fiber, or a horizontal geodesic segment in . By the triangle inequality, it thus suffices to assume that and are the endpoints of either a horizontal geodesic or a vertical saddle connection of length at most . Appealing to Lemma 3.18, it further suffices to show that is linearly bounded by for some . Lemmas 3.11 and 3.12(1) handle the horizontal segment case, since we are free to subdivide such a path into segments of length at most .
For the vertical segment case we assume and lie in the same fiber and differ by a saddle connection of length at most . Let , where , be the spine containing . The fact that is bounded means that is bounded distance from the horocycle . Let and let be the saddle connection in connecting and . By the triangle inequality and the first part above about bounded length horizontal segments, it suffices to work with the points . There are three cases to consider: Firstly, if , then so that and choose the closest cone points in to and , respectively. Since and are close, so are and . Secondly, if , then Corollaries 3.15 and 3.16, and Lemma 3.17 give a uniform bound on for any point . Finally, if then and are adjacent non-crossing spines in . Since is totally geodesic, if follows that and are either equal or connected by a single edge of . But this saddle connection has uniformly bounded length, since , which completes the proof of (1).
For (2), first recall that strips/saddle connections in the direction have uniformly bounded width/length over (Lemma 2.3). Therefore is contained in a bounded neighborhood of . By part (1) it thus suffices to bound and . When , Corollaries 3.15 and 3.16, and Lemma 3.17, imply that there exists so that has bounded diameter in . Appealing to Lemma 3.18 now bounds and in these cases. For the remaining case of 2(b), we note that is a single point by (8), and thus 2(b) follows. ∎
4. Hierarchical hyperbolicity of
In this section we complete the proof that is hierarchically hyperbolic. We will use a criterion from [BHMS20], which we now briefly discuss. For further information and heuristic discussion of this approach to hierarchical hyperbolicity, we refer the reader to [BHMS20, §1.5, “User’s guide and a simple example”].
Consider a simplicial complex and a graph whose vertex set is the set of maximal simplices of . The pair is called a combinatorial HHS if it satisfies the requirements listed in Definition 4.8 below, and [BHMS20, Theorem 1.18] guarantees that in this case is an HHS. The main requirement is along the lines of: is hyperbolic, and links of simplices of are also hyperbolic. However, this is rarely the case because co-dimension–1 faces of maximal simplices have discrete links. To rectify this, additional edges (coming from ) should be added to and its links as detailed in Definition 4.2. In our case, after adding these edges, will be quasi-isometric to , and each other link will be quasi-isometric to either a point or to one of the spaces or introduced in §3.
There are two natural situations where such pairs arise that the reader might want to keep in mind. First, consider a group acting on a simplicial complex so that there is one orbit of maximal simplices, and those have trivial stabilizers. In this case, we take to be (a graph isomorphic to) a Cayley graph of . (More generally, if the action is cocompact with finite stabilizers of maximal simplices, then the appropriate is quasi-isometric to a Cayley graph.) For the second situation, is the curve graph of a surface; then maximal simplices are pants decompositions of the surface and can be taken to be the pants graph. We will use this as a working example below, when we get into the details.
Most of the work carried out in §3 will be used (as a black-box) to prove that, roughly, links are quasi-isometrically embedded in a space obtained by removing all the “obvious” vertices that provide shortcuts between vertices of the link. This can be seen as an analogue of Bowditch’s fineness condition in the context of relative hyperbolicity.
This section is organized as follows. In §4.1 we list all the relevant definitions and results from [BHMS20], and we illustrate them using pants graphs. In §4.2 we construct the relevant combinatorial HHS for our purposes. In §4.3 we analyze all the various links and related combinatorial objects; we note that most of the work done in §3 is used here to prove Lemma 4.22. At that point, essentially only one property of combinatorial HHSs will be left to be checked, and we do so in §4.4.
4.1. Basic definitions
We start by recalling some basic combinatorial definitions and constructions. Let be a flag simplicial complex.
Definition 4.1 (Join, link, star).
Given disjoint simplices of , the join is denoted and is the simplex spanned by , if it exists. More generally, if are disjoint induced subcomplexes of such that every vertex of is adjacent to every vertex of , then the join is the induced subcomplex with vertex set .
For each simplex , the link is the union of all simplices of such that and is a simplex of . The star of is , i.e. the union of all simplices of that contain .
We emphasize that is a simplex of , whose link is all of and whose star is all of .
Definition 4.2 (–graph, –augmented dual complex).
An –graph is any graph whose vertex set is the set of maximal simplices of (those not contained in any larger simplex).
For a flag complex and an –graph , the –augmented dual graph is the graph defined as follows:
-
•
the –skeleton of is ;
-
•
if are adjacent in , then they are adjacent in ;
-
•
if two vertices in are adjacent, then we consider , the associated maximal simplices of , and in we connect each vertex of to each vertex of .
We equip with the usual path-metric, in which each edge has unit length, and do the same for . Observe that the –skeleton of is a subgraph .
We provide a running example to illustrate the various definitions in a familiar situation. This example will not be used in the sequel.
Example 4.3.
If is the curve complex of the surface , then an example of the an –graph, , is the pants graph, since a maximal simplex is precisely a pants decomposition. The –augmented dual graph can be thought of as adding to the curve graph, an edge between any two curves that fill a one-holed torus or four-holed sphere and intersect once or twice, respectively: indeed, these subsurfaces are precisely those where an elementary move happens as in the definition of adjacency in the pants graph.
Definition 4.4 (Equivalent simplices, saturation).
For simplices of , we write to mean . We denote by the equivalence class of . Let denote the set of vertices for which there exists a simplex of such that and , i.e.
We denote by the set of –classes of non-maximal simplices in .
Definition 4.5 (Complement, link subgraph).
Let be an –graph. For each simplex of , let be the subgraph of induced by the set of vertices .
Let be the full subgraph of spanned by . Note that whenever . (We emphasize that we are taking links in , not in , and then considering the subgraphs of induced by those links.)
We now pause and continue with the illustrative example.
Example 4.6.
Let and be as in Example 4.3. A simplex is a multicurve which determines two (open) subsurfaces , where is the union of the complementary components of the multicurve that are not a pair of pants, and . Note that is a submulticurve and that is a pants decomposition of . A simplex is equivalent to if it defines the same subsurfaces. Thus consists of together with all essential curves in , while is the join of graphs quasi-isometric to curve graphs of the components of . For components of which are one-holed tori or four-holed spheres, the corresponding subgraphs are isometric to their curve graphs (since the extra edges in precisely give edges for these curve graphs).
Definition 4.7 (Nesting).
Let be a simplicial complex. Let be non-maximal simplices of . Then we write if .
Finally, we are ready for the main definition:
Definition 4.8 (Combinatorial HHS).
A combinatorial HHS consists of a flag simplicial complex and an –graph satisfying the following conditions for some and :
-
(1)
any chain has length at most ;
-
(2)
for each non-maximal simplex , the subgraph is –hyperbolic and –quasi-isometrically embedded in ;
-
(3)
Whenever and are non-maximal simplices for which there exists a non-maximal simplex such that , , and , then there exists a simplex in the link of such that and all as above satisfy ;
-
(4)
if are distinct non-adjacent vertices of , for some simplex of , contained in –adjacent maximal simplices, then they are contained in –adjacent simplices of the form .
We will see below that combinatorial HHSs give HHSs. The reader not interested in the explicit description of the HHS structure can skip the following two definitions.
Definition 4.9 (Orthogonality, transversality).
Let be a simplicial complex. Let be non-maximal simplices of . Then we write if . If and are not –related or –related, we write .
Definition 4.10 (Projections).
Let be a combinatorial HHS.
Fix and define a map as follows. First let be the coarse closest-point projection, i.e.
Suppose that , so corresponds to a unique simplex of . Define
We have thus defined . If are joined by an edge of , then are joined by edges in , and we let .
Now let satisfy or . Let
Let . Let be the restriction of to , and otherwise.
The next theorem from [BHMS20] provides the criteria we will use to prove that is a hierarchically hyperbolic group.
Given a combinatorial HHS , we denote the set as in Definition 4.4, endowed with nesting and orthogonality relations as in Definitions 4.7 and 4.9. Also, we associated to the hyperbolic spaces as in Definition 4.8, and define projections as in Definition 4.10.
Theorem 4.11.
[BHMS20, Theorem 1.18, Remark 1.19] Let be a combinatorial HHS. Then is a hierarchically hyperbolic space.
Moreover, if a group acts by simplicial automorphisms on with finitely many orbits of links of simplices, and the resulting -action on maximal simplices extends to a metrically proper cobounded action on , then acts metrically properly and coboundedly by HHS automorphisms on , and is therefore a hierarchically hyperbolic group.
4.2. Combinatorial HHS structure
We now define a flag simplicial complex . The vertex set is , where
Given a vertex , let be the unique vertex with . We also write .
There are 3 types of edges (see Figure 6):
-
(1)
are connected by an edge if and only if .
-
(2)
are connected by an edge if and only if .
-
(3)
and are connected by an edge if and only if .
We declare to be the flag simplicial complex with the 1-skeleton defined above.
The map given by and the identity extends to a surjective simplicial map
We note that we may view the union on the right as a subgraph of , making a retraction.
For any vertex in any tree , is the join of and the set :
| (9) |
For any pair of adjacent vertices (so ), the preimage of the edge is also a join:
| (10) |
Lemma 4.12.
The maximal simplices of are exactly the –simplices with vertex set where and . In this case, we say that defines a maximal simplex, denoted .
Proof.
Given a vertex , recall from Lemma 3.5 that , for as in Proposition 3.1 (and Lemma 3.5). Given a pair of vertices in that define a maximal simplex , we will write .
Lemma 4.13.
There exists with the following properties.
-
(1)
For any pair of adjacent vertices (i.e., defining a maximal simplex ), is a non-empty subset of diameter at most .
-
(2)
Given , we have
-
(3)
Fixing , we have
-
(4)
The collection of all is –dense in .
Proof.
Item (1) follows from Proposition 3.1(3). More precisely, the fact that is non-empty follows from -coarse-surjectivity of , while boundedness follows from the fact that said map is a quasi-isometry.
Next we define a graph whose vertex set is the set of maximal simplices of . We would like to just connect maximal simplices when the corresponding subsets are close in (first bullet below); however, in order to arrange item (4) of the definition of combinatorial HHS (and only for that reason) we need different closeness constants for different situations. We fix as in Lemma 4.13, and moreover we require , for as in Proposition 3.1 and Lemma 3.5.
Given maximal simplices and , we declare them to be connected by an edge in if one of the following holds:
| (11) |
Here the the –distances are the infimal distances between the sets in (as opposed to the diameter of the union). Note that since , the second case also implicitly describes a “symmetric case” with and interchanged.
The following is immediate from Lemma 3.6, setting .
Lemma 4.14.
There exists so then the following holds. If are vertices with connected to both in and , then . In particular, whenever and are connected in , we have .
Lemma 4.15.
is quasi-isometric to , by mapping each to (any point in) . Moreover, the extension group acts by simplicial automorphisms on , induced by the existing action on and the action on as in Proposition 3.1(4). The resulting action on maximal simplices extends to a metrically proper cobounded action on .
Proof.
In view of Lemma 4.14, the first part follows by combining Lemma 4.13(4) and Proposition 2.4 (applied to any choice of a point in each ).
It is immediate to check that the -action defined on the -skeleton of extends to an action on . That the resulting action on maximal simplices of (that is, the -skeleton of ) extends to an action on follows from the equivariance property in Proposition 3.1(4) and the definitions of the sets and .
Moreover, the quasi-isometry described in the statement is -equivariant, so that the action of on is metrically proper and cobounded since the action of on has these properties. ∎
The goal for the remainder of this section is to prove the following.
Theorem 4.16.
The pair is a combinatorial HHS. Moreover, there is an action of on satisfying the properties stated in Theorem 4.11.
4.3. Simplices, links, and saturations
Before giving the proof of Theorem 4.16, we begin by describing explicitly the kinds of simplices of that there are, explain what their links and saturations are, and observe some useful properties.
Lemma 4.17 (Empty simplex).
For the empty simplex, is quasi-isometric to .
Proof.
We define a map that extends the (restricted) simplicial map already constructed above. To do that, we must extend over each edge of coming from the edge of connecting and . Since , and (for as in Lemma 4.14), we see that . We can then define on to be a constant speed parameterization of a uniformly bounded length path from to . It follows that is Lipschitz.
The union of the trees is –dense for some by [DDLS21, Lemma 3.6], so it suffices to find a one-sided inverse to , from to , and show that with respect to the subspace metric from , it is coarsely Lipschitz. As already noted, restricts to a retraction of onto , which is thus the required one-sided inverse. All that remains is to show that it is coarsely Lipschitz.
According to [DDLS21, Lemma 3.8], any are connected by a combinatorial path of length comparable to . Such a path is the concatenation of horizontal jumps, each of which is the –image in of a geodesic in , for some , that connects two components of and whose interior is disjoint from . From that same lemma, we may assume each horizontal jump has length uniformly bounded above and below, and thus has total number of jumps bounded in terms of . Therefore, we can reduce to the case that are joined by a single horizontal jump of bounded length. Such a horizontal jump can also be regarded as a path in connecting to . Hence, in view of Lemma 4.13(2), there are and within uniformly bounded distance of each other in . Lemma 4.15 implies that there exists a path in of uniformly bounded length from to , which can be easily turned into a path of uniformly bounded length from to in , as required. ∎
There is an important type of –dimensional simplex, which we call a –type simplex, due to the following lemma. See Figure 7. Given , set
| (12) |
Lemma 4.18 (–type simplex).
Let be a –simplex of with vertices , for . Then
Moreover, is quasi-isometric to , via a quasi-isometry which is the identity on and maps to for .
Proof.
It is clear from the definitions that the link of is as described. Also, any simplex with vertex set of the form for some has the same link as . Therefore, to prove that the saturation is as described we are left to show if a simplex has the same link as , then its vertex set is contained in the set we described. If is a vertex of , then for all neighbors of in . This implies . Similarly, if is a vertex of , then , and we are done.
Let us show that the map given in the statement is coarsely Lipschitz. To do so, it suffices to consider with and connected by an edge in , and show that they are connected by a bounded-length path in . We argue below that . Once we do that, the existence of the required bounded-length path follows directly from Lemma 3.8.
Let us now prove the desired inequality. Notice that cannot be connected by an edge of since they are both distance 1 from in the tree . Hence, and are contained respectively in maximal simplices and connected by an edge in . Say, up to swapping with and/or with , that and . In either case of the definition of the edges of we have . Since and , using Lemma 4.14 we get
as we wanted.
There is also an important type of –dimensional simplex, which we call a –type simplex, due to the next lemma. See Figure 8.
Lemma 4.19 (–type simplex).
Let be a –simplex of with vertices , for and with . Then
Moreover, is quasi-isometric to , the quasi-isometry being the identity at the level of vertices.
Proof.
It is clear from the definitions that the link of is as described. Also, any simplex with vertex set of the form for some with has the same link as . Therefore, to prove that the saturation is as described we are left to show if a simplex has the same link as , then its vertex set is contained in the set we described. Given any vertex of , it has to be connected to all with , implying that either or , as required for vertices in . Similarly, any vertex of has to be connected to all with , implying , and we are done.
To prove that is naturally quasi-isometric to , it suffices to show that if are connected by an edge in , then they are uniformly close in and that, vice versa, if , then are connected by an edge in .
First, if are connected by an edge in , then there exist so that (see Lemma 4.14). In particular, , which in turn gives a uniform bound on the distance in the path metric of between and because the metrics and the path metric on are coarsely equivalent. By Proposition 3.1(1) we must also have a uniform bound on .
The remaining simplices are not particularly interesting as their links are joins (or points), and hence have diameter at most , but we will still need to verify properties for them. We define the type of a simplex in to be the graph isomorphism type of its link. We describe these simplices with finite diameter links in the next lemma. Recall the definition of in (12).
Lemma 4.20.
The following is a list of all types of non-empty, nonmaximal, simplices of that are not of –type or –type, together with their links. In each case, the link is a nontrivial join (or a point), and has diameter at most .
In the table below the simplices have vertices with and with and .
Proof.
The next lemma collects a few additional properties we will need. There are types of nonempty simplices: maximal, –type, –type, and the six types listed in Lemma 4.20.
Lemma 4.21.
The following hold in .
-
The link of a simplex with a given type cannot be strictly contained in the link of a simplex with the same type.
-
For all non-maximal simplices and so that there is a simplex with and , there exists a simplex in the link of with so that for any as above we have .
Proof.
Part follows directly from the descriptions of the simplices given in Lemmas 4.18, 4.19, and 4.20, and we leave this to the reader.
Before we prove , we suppose , and make a few observations. First, and must project by to the same tree: for some . Next, note that is contained in the intersection of the stars in of and . Moreover, (as in any tree) the intersection of these two stars is contained in a single edge, or else is a single point. In this latter case, by (9), we have
Next, note that for any –type simplex , by Lemma 4.19, and if , then is in the intersection of the stars of and . For a –type simplex , by Lemma 4.18, and together with Lemma 4.20 and the previous paragraph, we see that if and only if in .
With these observations in hand, we proceed to the proof of , which divides into two cases.
Case 1. There is a –type simplex with .
In this situation, , and thus . From Lemmas 4.18 and 4.20, we see that must be equal to one of , , or . Inspection of these links shows that is the only link of a –type simplex contained in it. First suppose that has the form or . In this situation, we easily find so that . Furthermore, for any –type simplex link in the intersection, we must have . Therefore, the link of any –or –type simplex contained in must be contained in , as required. Now suppose instead that . By Lemma 4.20, we see that . In this case, setting trivially completes the proof since then .
Case 2. No link of a –type simplex is contained in .
From the observations above, and do not consist of the same single point, and hence the stars of and intersect in either a point or an edge in . Since is contained in the intersection of these stars, there are at most two –type simplices whose links are contained in . If there are two –type simplices with and contained in , then observe that
By inspection of the possible links in Lemmas 4.18, 4.19, and 4.20, it must be that is either , , or , and so setting to be , , or , respectively, we are done. On the other hand, if there is exactly one –type simplex with , then again inspecting all possible situations, we can find with , and again we are done with this case. This completes the proof. ∎
Lemma 4.22.
There exists so that for every non-maximal simplex, there is an –coarsely Lipschitz retraction . In particular, is uniformly quasi-isometrically embedded in .
Proof.
By Lemma 4.20, we only have to consider simplices of –and –type.
Consider with of –type first. Recall from Lemma 4.18 that naturally includes into by a quasi-isometry. Here we will use make use of the map , whose relevant properties for our current purpose are stated in Proposition 3.19. For a vertex (so, ) we define . For we define . Notice that the sets are uniformly bounded by Proposition 3.19 (and Lemma 4.18). Also, is coarsely the identity on the vertices of in by Equation (8) and Proposition 3.19(2b). To check that is coarsely Lipschitz it suffices to consider –adjacent vertices of . Notice that vertices that are adjacent in have corresponding within of each other in . Indeed, and actually intersect if are adjacent in , and they contain subsets within of each other if are contained in –adjacent maximal simplices (this is true regardless of which case of the definition (11) for the edges of applies). The fact that is coarsely Lipschitz now follows from, Proposition 3.19(1), which says that is coarsely Lipschitz on .
Next, consider of –type. For a vertex (so, ), define . For a vertex , define . Notice that, by definition of , if , then lies within Hausdorff distance of . Also, since , Proposition 3.19(2a) ensures that the diameter of is bounded. Since , we see that all the sets in the image of are bounded, and also we see that in order to prove that is Lipschitz it suffices to consider vertices of . But vertices that are adjacent in have corresponding within of each other in , so the conclusion follows from Proposition 3.19(1), which states that is coarsely Lipschitz on . ∎
4.4. Final proof
We now have all the tools necessary for the:
Proof of Theorem 4.16.
We must verify each of the conditions from Definition 4.8.
Item (1) (bound on length of –chains) follows from Lemma 4.21(a), which implies that any chain has length bounded by the number of possible types, which is 9.
Let us now discuss item (2) of the definition. The descriptions of the from Lemmas 4.17, 4.18, 4.19, 4.20 yields that all are hyperbolic, since each of them is either bounded or uniformly quasi-isometric to one of (which is hyperbolic by Theorem 2.1), some (which is hyperbolic by Lemma 3.10), or . Moreover, any is (uniformly) quasi-isometrically embedded in by Lemma 4.22.
Finally, we show item (4) of the definition (fullness of links), which we recall for the convenience of the reader:
-
•
If are distinct non-adjacent vertices of , for some simplex of , contained in –adjacent maximal simplices, then they are contained in –adjacent simplices of the form .
It suffices to consider simplices of –and –type. Indeed, in all other cases (see Lemma 4.20), the vertices under consideration are contained in the link of a simplex containing where is of –or –type (as can be seen by enlarging until its link is no longer a join; and are not –adjacent so they are contained in the same “side” of any join structure). Hence, once we deal with those cases, we know that there are suitable maximal simplices containing the larger simplex, whence .
Consider first a simplex of –type with vertices . Consider distinct vertices (necessarily in ) of , and suppose that there are vertices so that the maximal simplices and are connected in . There are two possibilities:
-
•
. In this case, we have . In particular, in view of the second bullet in the definition of the edges of , we have that are contained, respectively, in the –connected maximal simplices and .
-
•
and (notice that so that the “symmetric” case cannot occur). Again, we reach the same conclusion as above.
We can now consider a simplex of –type with vertices . Consider vertices of that are not –adjacent but are contained in –adjacent maximal simplices. Furthermore, we can assume that are not in the link of a simplex of –type (the case we just dealt with) which contains , since in that case we already know that there are suitable maximal simplices containing the larger simplex, whence . Then, using the structure of , we see that there are vertices so that:
-
•
,
-
•
and all belong to , and
-
•
and are connected in .
In turn, the last bullet splits into two cases:
-
•
. In this we have , so that are contained, respectively, in the –connected maximal simplices and , so this case is fine.
-
•
and . But again we reach the same conclusion as before.
We now also have to check the existence of an action of with the required properties. The action is constructed in Lemma 4.15, where all properties are checked except finiteness of the number of orbits of links of . The finitely many possible types of links are listed in Lemmas 4.17 – 4.20, and for each type of simplex there are only finitely many orbits, so we are done. ∎
5. Quasi-isometric rigidity
In this section, using the HHS structure, we prove a strong form of rigidity for the group and the model space . Recall that is defined via a particular truncation of the Teichmüller disk obtained by removing –separated horoballs. We say that such a truncation is an allowable truncation of if acts by isometries on it with cocompact quotient. Write and for the isometry group and quasi-isometry group, respectively, of a metric space . For , we write for the subgroup of isometries that map fibers to fibers.
Theorem 1.7.
There is an allowable truncation of such that the natural homomorphisms are all isomorphisms, and has finite index.
The proof is divided up into several steps which we outline here before getting into the details. The first step is to use the HHS structure to identify certain quasi-flats in , and prove that they are coarsely preserved by a quasi-isometry. The maximal quasi-flats are encoded by the strip bundles in , and using the preservation of quasi-flats, we show that a quasi-isometry further preserves strip bundles, and even sends all strip bundles for strips in any fixed direction to strip bundles in some other fixed direction. From there we deduce that a quasi-isometry sends fibers within a bounded distance of some other fibers , and in fact induces a quasi-isometry between the fibers. Fixing attention on and further appealing to the structure of strip bundles, we show that a self quasi-isometry of induces a special type of quasi-isometry from to itself sending strips in a fixed direction within a uniformly bounded distance of strips in some other fixed direction. This quasi-isometry is promoted to a piecewise affine biLipschitz map from to itself, which we then show is in fact affine. This produces a homomorphism to the full affine group of , . Given an affine homeomorphism of , we construct an explicit fiber preserving isometry associated to it, which via the inclusions serves as a one-sided inverse. Finally, we prove that the homomorphism is injective, hence the homomorphisms are all isomorphisms. The fact that has finite index in , and hence in , is straightforward using the cocompactness of the action of and the singular structure.
5.1. HHS structure and quasi-flats
Denote by the set . We denote the element by (for “quasi-tree”) and by (for “quasi-line”).
We denote by the set of all strip bundles of , that is, subbundles with fiber a strip and base the horocycle corresponding to the direction of the strip. (Roughly, these are the flats of the peripheral graph manifolds.)
Proposition 5.1 (Properties of the HHS structure).
The HHS structure on coming from Theorem 4.16 has the following properties, for some .
-
(1)
The set of non--maximal with is in bijection with . Under said bijection:
-
(2)
is -quasi-isometric to a quasi-tree with at least two points at infinity, and is –quasi-isometric to a line;
-
(3)
For all , we have ;
-
(4)
For all adjacent , we have and ;
-
(5)
All pairs of elements of that do not fall into the aforementioned cases are transverse;
-
(6)
For each adjacent there is so and are –coarsely dense, and has diameter at most for all .
Proof.
The second paragraph of the proof of Theorem 4.16 implies is quasi-isometric to the quasi-tree (with at least two points at infinity by Lemma 3.10) and is quasi-isometric to the quasi-line , and that these are the only non-maximal elements of diameter at least . This proves (1) and (2). In view of the combinatorial description of orthogonality and nesting from Definition 4.9, properties (3)-(5) boil down to combinatorial properties of that are straightforward to check. For example, regarding property (3) note that two (equivalence classes of) simplices are orthogonal if their links form a join. The links of the simplices corresponding to and are and (see Lemmas 4.18 and 4.19), which indeed form a join.
Regarding property (6), first of all the projections in the HHS structure on are obtained composing the quasi-isometry from Lemma 4.15 and the projections defined in Definition 4.10 (roughly, those are closest-point projections in the complement of saturations).
The required strip bundle is the intersection , which under the quasi-isometry of Lemma 4.15 corresponds to the set of all maximal simplices of of the form for , . In view of the description of the from Definition 4.10, the coarse density claim follows since the union of the simplices described above contains the links of the simplices corresponding to and , which are and .
Regarding the boundedness claim, it can be checked case-by-case that the set of simplices described above gives a bounded set of for (for example, note that said set is bounded if the saturation of does not intersect , or if it does not contain or ). This implies boundedness of the projections since the projections are coarsely Lipschitz; this follows from Theorem 4.16 since the projection maps of an HHS are required to be coarsely Lipschitz. ∎
From now on we identify with the set of all with as in Proposition 5.1. Notice that the maximal number of pairwise orthogonal elements of is 2. Therefore, a complete support set as in [BHS21, Definition 5.1] is just a pair of orthogonal elements of .
Let be the set of pairs where and with for some . We say that two such pairs and are orthogonal if and are. Any element comes with a quasi-geodesic ray in , as in [BHS21, Definition 5.3], so that is a quasi-geodesic in and is bounded for all .
We recall that given subsets and of a metric space , we say that the subset of is the coarse intersection of and if for every sufficiently large we have that lies within finite Hausdorff distance of . If the coarse intersection of two subsets exists, then it is well-defined up to finite Hausdorff distance.
Lemma 5.2.
Let be a quasi-isometry. Then there is a bijection preserving orthogonality and so that .
Proof.
Let be the set of pairs where and , without the restriction on .
The lemma with replacing would follow directly from [BHS21, Theorem 5.7], except that the HHS structure on does not satisfy one of the 3 required assumptions, namely Assumption 2 (while it does satisfy Assumption 1 by parts (1) and (2) of Proposition 5.1, and it also satisfies Assumption 3 since there are no 3 pairwise orthogonal elements of , by parts (3)-(5) of Proposition 5.1).
Inspecting the proof of [BHS21, Theorem 5.7], we see that Assumption 2 is used in two places.
The first one is to define the map on a certain pair . The argument applies verbatim if satisfies Assumption 2, that is, if and only if is the intersection of 2 complete support sets. This is the case if for some , that is, if . Therefore, one can use that argument to define a map . What is more, the image of needs to be contained in . This can be seen from the fact that for arises as a coarse intersection of standard orthants, which are, essentially, products of rays , see [BHS21, Definition 4.1] for the precise definition. Notice that [BHS21, Lemma 4.11] says, roughly, that coarse intersections of standard orthants are the expected sub-products. Hence, the failure of Assumption 2 for implies that cannot be a coarse intersection of standard orthants, and therefore for also needs to lie in .
The second place where Assumption 2 is mentioned in [BHS21, Theorem 5.7] is the proof that preserves orthogonality. There the assumption is used to say that certain quasi-geodesic rays are of the form . Such quasi-geodesic rays arise as coarse intersections of standard orthants, so, as mentioned above, they need to be of the form for , hence Assumption 2 is not actually needed there.
Thus, the arguments in the proof of [BHS21, Theorem 5.7] give the lemma. ∎
Lemma 5.3.
For every there exists so that the following holds. Let be a –quasi-isometry. Then there is a bijection so that for all .
Proof.
Let be the two points at infinity of for some . We claim that there exists so that, for the points at infinity of , we have , up to relabeling. We use that preserves orthogonality to show this. Let be distinct and adjacent to , and let be the points at infinity of , . Then are the only elements of that are orthogonal to all the . Since preserves orthogonality, we see that are both orthogonal to the same 4 distinct elements of with the property that no pair of them is orthogonal. This is easily seen to imply that must be of the form , since said elements need to be associated to at least 2 distinct vertices of . This shows the claim.
Denote by the collection of all strips in , and for denote by the direction of . Similarly, for we denote the direction of the strip defining .
Proposition 5.4.
Given , there exists so that if is a –quasi-isometry, then for all , there exists so that the Hausdorff distance between and is at most . In particular, . Moreover, there are bijections and so that:
-
(1)
for each .
-
(2)
and for all ,
Proof.
First, note that fibers are quantitatively coarse intersections of the sets , in the sense that exists a function and such that
-
•
for any and any there are two distinct whose –neighborhoods intersect in a set within Hausdorff distance of ;
-
•
for , if the –neighborhoods of two distinct intersect, then this intersection lies within Hausdorff distance of a fiber.
This follows via the bundle-map and the corresponding relationship between neighborhoods of distinct horocycles in .
We next make three preliminary observations. Firstly, for each the set is the union of all with . Secondly, if have then the coarse intersection of and is bounded. Indeed, is contained in , and the coarse intersection of these is some (or really, any) fiber . Since the coarse intersection of with is a strip in the corresponding direction, and strips in different directions have bounded coarse intersection, the claim follows. Thirdly, observe that have if and only if there is a chain of elements in from to so that consecutive elements have unbounded coarse intersection. The “if” part follows from the previous observation, while the “only if” follows from the fact that elements of corresponding to adjacent edges of some have unbounded coarse intersection.
In view of all this and Lemma 5.3, we see that for each there exists a (necessarily unique) so that and have finite Hausdorff distance. In fact, the distance is uniformly bounded by the constant , depending only on , coming from Lemma 5.3. This is how we define .
Now for any , we may choose so that the fiber has Hausdorff distance at most from the intersection of the –neighborhoods of . Thus there is some uniform , again depending only on , so that has Hausdorff distance at most from the intersection of the –neighborhoods of ; further, as mentioned above, this intersection of –neighborhoods has Hausdorff distance at most to some fiber , as claimed.
Finally, we define via the bijection between strip bundles and strips in . That is, if corresponds to , then is the strip corresponding to . Since is the coarse intersection of with , the desired properties for then follow from the facts that and that lies within finite Hausdorff distance of . ∎
5.2. From to
The next step is to construct a homomorphism by associating a quasi-isometry of to each quasi-isometry of (see Lemma 5.7). This step requires some preliminaries which we now explain.
To distinguish between two relevant notions of properness, we will call a map between metric spaces topologically proper if it is continuous and preimages of compact sets are compact, and metrically proper if there exist diverging functions (which we will call properness functions) such that for all we have
(Both types of maps are just referred to as “proper” in the appropriate contexts, but neither notion implies the other.)
For and , we endow with the restriction of the metric of , while is endowed with its path metric. Then the restriction of to is metrically proper. Indeed, is topologically proper and equivariant with respect to a group acting cocompactly. Note that the properness functions here can be taken independently of the fiber (once we fix ) because there is also a cocompact action on . We also note the following lemma.
Lemma 5.5.
A metrically proper coarsely surjective map between geodesic metric spaces is a quasi-isometry. Moreover, the quasi-isometry constants depend only on the properness functions and the coarse surjectivity constant.
This follows from standard arguments. First, a metrically proper map from a geodesic metric space is coarsely Lipschitz (the proof involves subdividing geodesics into segments of length at most 1, each of which has bounded image). Also, coarse surjectivity allows one to construct a quasi-inverse of the map, which is furthermore metrically proper. As above, the quasi-inverse is coarsely Lipschitz, and we conclude since a coarsely Lipschitz map with a coarsely Lipschitz quasi-inverse is a quasi-isometry.
Given any quasi-isometry and , define to be . In the case of the base fiber we denote this . When is understood, we also write and .
Lemma 5.6.
For any –quasi-isometry and , the map is a –quasi-isometry, where depends only on and . Furthermore, for any , .
Proof.
First note that the restriction of to is metrically proper, since the path metric on and the restricted metric from are coarsely equivalent (that is, the identity on is a metrically proper map between these metric spaces). Next let , which is finite by Proposition 5.4, and note that the restriction is also metrically proper. Therefore the composition is metrically proper and, moreover, the properness functions depend only on and not on the fiber .
By [KL12, Theorem 3.8] and the fact that is uniformly quasi-isometric to , any metrically proper map of to itself is coarsely surjective and, moreover, the coarse surjectivity constant depends only on the properness functions. Therefore is coarsely surjective and a uniform quasi-isometry by Lemma 5.5.
Lemma 5.7.
The assignment , for any quasi-isometry , gives a well-defined homomorphism .
Proof.
Given any quasi-isometry and we have
The right hand side is finite by Proposition 5.4, so the left hand side is bounded, independent of . From this, the triangle inequality, and the uniform metric properness of the inclusion of into , it easily follows that if and are bounded distance, then so are and . Therefore the assignment descends to a well-defined function .
To see that is a homomorphism, suppose are –quasi-isometries of . Then from the inequality above, for all we have
The left-hand side is thus uniformly bounded, independent of . From this, the triangle inequality, and Proposition 5.4, it follows that and are bounded by some constant . Then for all ,
Combining this with the previous inequality, we see that the quantity on the right, and hence the left, is uniformly bounded above, independent of . Therefore and are bounded distance apart and is a homomorphism. ∎
5.3. From quasi-isometries to affine homeomorphisms
The flat metric on determines an associated affine group , and we observe that if is an element of the extension group (which is an isometry of , and so also a quasi-isometry), we have . The next step in the proof of rigidity is the following.
Proposition 5.8.
For any quasi-isometry , the quasi-isometry is uniformly close to a unique element .
The proof of the proposition will take place over the remainder of this subsection. Before getting to the proof, however, we note a useful corollary. Two quasi-isometries that are a bounded distance apart have and a bounded distance apart, and so by the uniqueness . Thus we have the following.
Corollary 5.9.
The map defines a homomorphism . Moreover, the homomorphism from Lemma 5.7 factors as the composition of with the natural inclusion .
Fix a triangulation of so that the vertex set is the set of cone points and all triangles are Euclidean triangles (that is, they are images of triangles by maps that are locally isometric and injective on the interior; see e.g. [DDLS21, Lemma 3.4]). Moreover, we assume that all saddle connections in some direction appear as edges of the triangulation; see Figure 9. Lift to a triangulation of . By assumption, all saddle connections in in direction are edges of , and the complement of the union of this subset is a union of all (interiors of) strips in direction .
Lemma 5.10.
Given a quasi-isometry , there is a biLipschitz homeomorphism a bounded distance from so that restricts to an affine map on each triangle of . Moreover, if an edge of has direction , then has direction .
We will later prove that is in fact globally affine, justifying the notation.
Proof.
Given , let be the restriction of the extension to the Gromov boundary of . (Recall that, since the flat metric on is biLipschitz to a hyperbolic metric, its universal cover is quasi-isometric to the standard hyperbolic plane and is, in particular, Gromov hyperbolic.) The space of (unordered) pairs of distinct points in is precisely the space of endpoint-pairs at infinity of unoriented biinfinite geodesics (up to the equivalence relation of having finite Hausdorff distance). The map induces a map .
Let be the closure of the set of endpoint-pairs at infinity of non-singular geodesics (i.e. geodesics that miss every cone point). Observe that all geodesics in a given strip have the same pair of endpoints, and any geodesic with that pair of endpoints is contained in the strip. Given a strip, we are therefore justified in referring to the pair of endpoints of the strip.
It follows from the description of geodesics with endpoints in (see [BL18, Proposition 2.4]) together with the Veech Dichotomy (see e.g. [MT02]), that for any , either are the endpoints of a strip, or endpoints of a geodesic meeting at most one cone point.
According to Proposition 5.4, for any strip , the strip has finite Hausdorff distance to , and hence it also has finite Hausdorff distance to . Since is a bijection, this means that the homeomorphism sends the dense subset of consisting of endpoint of strips onto itself, hence . From this and [BL18, Proposition 4.1] (see also [DELS18, Proposition 11]), it follows that there is a bijection
from the set of cone points of to itself with the following property. If is a geodesic or strip containing with endpoints , then are the endpoints of a geodesic containing . Given consider any two geodesics and with endpoints in (not necessarily contained in strips) passing through making an angle at least with each other. We note that is contained in and , and is thus some uniform distance to both of their geodesic representatives. Since and meet at angle at least , the –neighborhoods of the geodesic representatives of and intersect in a uniformly bounded diameter set, which contains . Therefore, is uniformly close to , for all .
From the properties of described above, we see that if is contained in a strip , then is contained in the strip . For any saddle connection in some direction between a pair of points , there is a unique pair of strips , also in direction , that contain ; see Figure 10. Since are contained in and , it follows that there is a unique saddle connection with endpoints . For any strip the saddle connections whose union makes up one of its boundary components is determined by a collection of strips meeting in the given saddle connections. These saddle connections are ordered along this side and thus so are the corresponding strips . The endpoints of the strip and strips appear in a particular order; see Figure 10. Considering the cyclic ordering of the endpoints of these strips (and those of ) on , and the fact that is a homeomorphism, it follows that maps the ordered set of cone points along each boundary component of the strip by an order preserving (or reversing) bijection to the ordered set of cone points along the boundary components of .
We can now extend the map to a map using as follows. First, recall that any edge of is a saddle connection connecting two points . By the previous paragraph, there is a saddle connection connecting and , and we define on so that it maps by an affine map to extending on the endpoints. This defines on the –skeleton, , and since is a bounded distance from , it follows that is a bounded distance from .
By our assumptions on , there is a subset of the edges of whose union is precisely the union of boundaries of all strips in direction . The order preserving (or reversing) property described above for the cone points along the boundary of a strip, together with Proposition 5.4, implies that for any boundary component of any strip in direction , restricted to its boundary components is a homeomorphism onto the boundary components of . Furthermore, since the sides of any triangle of are contained in such a strip , the –image of the sides are contained in . We can now extend over the triangles by the unique affine map extending the map on their sides.
Since disjoint strips map to disjoint strips, the map is a homeomorphism. By construction, any edge in direction is sent to an edge in direction . Since projects to , there are only finitely many directions that the sides of a triangle can lie in and so finitely many isometry types of triangles. Each of these finitely many isometry types maps by an affine map to only finitely many types of triangles in the image (because the direction of the images of sides are determined by ), and therefore these affine maps are uniformly biLipschitz. Therefore, is biLipschitz, completing the proof. ∎
To show that is affine, we analyze the effect of using it to conjugate the action of on .
Lemma 5.11.
The action of on obtained by conjugating the isometric action by is again an isometric action.
Before proving the lemma, we use it to prove the proposition.
Proof of Proposition 5.8.
By Lemma 5.11, acts by isometries, and descends to a homeomorphism and is biLipschitz with respect to descent to and of . Since and are a bounded distance, they have the same boundary maps. Since maps to , the Current Support Theorem of [DELS18] (and its proof) implies that the descent of is affine. Therefore is an affine map which is a bounded distance from , as required.
Uniqueness follows from the fact that no two distinct affine maps are a bounded distance apart. ∎
Proof of Lemma 5.11.
We need to show that for all , the map
is an isometry. For this, fix a triangle of and consider the restriction to . Let be the directions of the sides. Setting , for , Lemma 5.10 implies that the directions of the sides of are . The action of on is by isometries, but it also preserves parallelism (i.e. each element induces the identity on ). Therefore, for any , the directions of the sides of are also , and by Lemma 5.10 again, it follows that the sides of are .
For any , since is affine on , the composition is also affine on . On the other hand, it also preserves the directions of the sides, . Therefore, the restriction of is a Euclidean similarity. Triangles of that share a side are scaled by the same factor by the similarity in each triangle (since this is the scaling factor on the shared side). Therefore, the similarities agree along edges, and hence defines a global similarity of .
So, the action of on obtained by conjugating by is an action by similarities. To see that the action is by isometries, suppose that for some element , the similarity scales the metric some number . Taking the inverse if necessary, we can assume . Fix any and observe that , where is the distance function on determined by . Iterating this, it follows that
Since the right-hand side is a convergent geometric series, it follows that is a Cauchy sequence. On the other hand, this sequence exits every compact set (since is an infinite order element of ), and since is a complete metric on , thus we obtain a contradiction. Therefore, the conjugation action of is by isometries. ∎
5.4. Injectivity of .
Our next goal is to prove that , the homomorphism from Corollary 5.9, is injective.
In preparation, it will be useful to have the following general fact about quasiisometries of hyperbolic spaces, whose proof we sketch for convenience of the reader:
Lemma 5.12.
For each there exists so that the following holds. Suppose that is –hyperbolic and that each lies within of all three sides of a nondegenerate ideal geodesic triangle. Let be a -quasi-isometry that lies within finite distance of the identity. Then lies within distance of the identity.
Proof.
Since is within bounded distance of the identity, its extension is the identity. Hence if and is an ideal geodesic triangle as in the statement, then is a -quasigeodesic ideal triangle with the same endpoints as . By the Morse lemma, there is a constant such that lies within of the three quasi-geodesic sides of , and these sides in turn lie within of the sides of . Thus and both lie within of all three sides of . Since the set of points within of all three sides of a nondegenerate geodesic triangle in a –hyperbolic space has diameter bounded in terms of and , we see that is bounded solely in terms of , as required. ∎
With this fact in hand, we can now prove:
Proposition 5.13.
Let be a quasi-isometry with . There is a constant such that for all , . Consequently, is injective.
Proof.
We first claim that for any , lies within the –neighborhood of , where . To see this, observe that since is the identity and is bounded distance from , it follows that is within bounded distance of the inclusion of in . Proposition 5.4 then implies that for each strip . Since strips that lie within finite Hausdorff distance coincide, we have . Combining this fact with Proposition 5.4 it follows that . Hence for each , we have that lies within Hausdorff distance of , for as in Proposition 5.4.
Now let be any point and choose distinct so that is contained in the coarse intersection of and , implying that lies in the coarse intersection of and . By the coarse preservation of the in the previous paragraph, the coarse intersection of and is within Hausdorff distance of the coarse intersection of and , and hence and are within uniform Hausdorff distance. This proves the claim.
Since is -bi-Lipschitz when restricted to fibers in the -neighborhood of , the claim implies that is a quasi-isometry with constants depending only on and not . Moreover, since each lies within finite (but not necessarily bounded) Hausdorff distance of , the fact that lies within finite distance of the inclusion implies that lies within finite distance of the identity . Since each is uniformly quasiisometric to , it follows that satisfies the assumptions of Lemma 5.12. We conclude that is within uniformly bounded distance of the identity for each . Since , it follows that is uniformly bounded, independent of . This proves the first statement of the proposition.
If is the identity for some , then by the first part of the proposition, is a bounded distance from the identity. Therefore, and the identity represent the same class, and is injective. This completes the proof. ∎
5.5. From affine homeomorphisms to isometries
Next we will choose a particular allowable truncation and construct a homomorphism , that we will eventually show is an isomorphism. We first construct such a homomorphism to the fiber-preserving isometry group of the space , which avoids the issue of choosing the truncation.
Lemma 5.14.
For any , there exists a isometry such that . Moreover, this assignment defines an injective homomorphism .
Proof.
Recall from §2.1 that the projective tangent space at any non-cone point of is denoted and is canonically identified with . The derivative of (which may reverse orientations) is a well-defined projective transformation which, using the preferred coordinates on with distinguished vertical and horizontal directions, we canonically identify with . The Teichmüller disk is the orbit of under the action and is identified with (see e.g. [DDLS21, §2.8]). As acts isometrically on , we thus obtain an isometry whose induced map of the circle at infinity agrees with the derivative under the canonical identification . In particular, setting , the geodesic ray in emanating from and asymptotic to is sent to the geodesic ray emanating from asymptotic to .
We claim the map is an isometry of fibers. Indeed, any pair of orthogonal directions on are the endpoints of a geodesic in containing . Since is an isometry with , we have that lies on the geodesic from to ; that is, are orthogonal on . But since and are canonically identified by the Teichmüller map (see e.g. [DDLS21, §2.8]), this means is an affine map whose derivative preserves orthogonality of lines; hence is an isometry as claimed.
Now we define by the formula:
In words, this maps the fiber over a point to the fiber over , and the horizontal disk , for , to . The restriction is an isometry since it covers . To prove that is an isometry, it therefore suffices to show that is an isometry for any .
Fix any . For , we have already seen that is the isometry . If , there exist unique orthogonal directions and , so that and both lie on the the geodesic from to in and lies distance from in the direction of . This means that contracts in direction by and stretches in direction by . The image lies along the geodesic from to at distance from ; therefore contracts by in direction and stretches by in direction . The restriction is given by . Since sends and , the description above shows that is an isometry. Therefore is an isometry, as required.
To see that is a homomorphism, note that by construction is the unique isometry of for which . Thus the chain rule implies is the unique isometry whose action on agrees with . For any we have and hence by construction
as needed. Finally, if then clearly . Since by construction, we conclude that
Hence is the identity affine map, showing that is injective. ∎
Lemma 5.15.
The subgroup has finite index.
Proof.
By [DDLS21, Proposition 5.5], acts properly discontinuously on . Therefore is a topological orbifold with well-defined, positive Riemannian volume. The index of in is the degree of the orbifold cover and equals the ratio of the respective volumes. As has finite volume, since the quotient has finite area and the fibers all have equal, finite area, we conclude that indeed has finite index. ∎
Lemma 5.16.
There is an allowable truncation that is –invariant and for which restricting to induces an injection .
Remark 5.17.
Every fiber-preserving isometry of uniquely extends to one of (e.g. by following the proof of Lemma 5.14) and thus is in fact an isomorphism.
Proof.
There is a natural map that sends onto . Hence, by the previous lemma, the image of under this map contains with finite index. Therefore acts properly discontinuously on and we may choose a collection of –separated horoballs as in §2.1 that is –invariant. If denotes the corresponding truncation of , it follows that every element of preserves . The map given by restricting is injective by [DDLS21, Corollary 5.6] since if is the identity, then must be the identity on each Teichmüller disk and fiber . ∎
Choosing such an allowable truncation , Lemmas 5.14 and 5.16 now give an injective homomorphism given by .
Lemma 5.18.
For any , , where we have identified with its image in from the homomorphism .
Proof.
Lemma 5.19.
For any , we have . In particular, the natural maps are both injective.
Proof.
By construction is the unique affine homeomorphism bounded distance from . As this map is itself affine, we have . The isometry in the construction of is then just the descent of to . Further, for any we have , since if lies at distance from along the geodesic from to , then both maps send while contracting the first by and expanding the second by , hence they are the same affine map . It follows that the restriction is then the composition
Since this holds for each , we conclude as claimed.
It follows that is injective, since if is the identity in , meaning is finite distance from the identity, then and consequently are both the identity. Finally, is injective since we have by [DDLS21, Corollary 5.4]. ∎
5.6. Rigidity
We are now ready to complete the proof of Theorem 1.7:
Proof of Theorem 1.7.
Standard techniques (see, for example [Sch95, §10.4]) now imply the following:
Corollary 5.20.
If is any finitely generated group quasi-isometric to , then and are weakly commensurable, meaning has a finite normal subgroup so that and contain finite index subgroups that are isomorphic.
This proof requires one more lemma.
Lemma 5.21.
For every there exists such that if is a -quasi-isometry that lies within finite distance of the identity, then lies within distance of the identity, meaning for all .
Proof.
First define a map by setting , where is the point provided by Proposition 5.4 such that . Since for all in , we see that is a quasi-isometry with constants depending only on . It also lies within finite distance of the identity, as it inherits this property from ; thus applying Lemma 5.12 to implies that lies within uniformly finite distance of the identity. That is, there exists depending only on so that for all . Hence, Lemma 5.6 implies that for each map is a –quasi-isometry for some depending only on . Again by Lemma 5.12, this time with , we see that each moves points uniformly bounded distance, and therefore lies within uniform distance of the inclusion of in . Since this holds for all , we have that lies within uniform distance of the identity, as required. ∎
Proof of Corollary 5.20.
If is quasi-isometric to , there is a quasi-isometry with a quasi-inverse . Left multiplication by gives an isometry . In this way, for each we obtain a quasi-isometry of with uniformly bounded constants. Let us also set , which is the unique isometry of at finite distance from . Since the quasi-isometry constants of are uniform, depending only on , it follows from Lemma 5.21 that there is a constant so that for all and .
We now claim the homomorphism has finite kernel and cokernel. Indeed, if the above implies moves (and in fact all points) distance at most . But this means moves the identity uniformly bounded distance, and there are only finitely many such elements of . To prove has finite cokernel it suffices, as in Lemma 5.15, to show has finite volume or, better yet, finite diameter. For this, given we must find so that is uniformly bounded. This is equivalent to bounding , which is coarsely . Since acts transitively on itself, this is clearly possible.
We now see that and are both realized as finite index subgroups of and hence that their intersection has finite index in both. ∎
5.7. An alternative proof of quasi-isometric rigidity
Here we sketch another proof of Theorem 1.2, following an approach described by Mosher in [Mos06]; we refer the reader to that paper for a more detailed discussion.
First, we require some additional definitions. Consider the maximal orbifold quotient so that descends to a group in the mapping class group of the orbifold ; that is, consists of lifts of elements of . Let be the relative commensurator of in , which consists of the elements so that has finite index in both and . (In fact, we must allow for orientation reversing mapping classes, but continue to denote this group for simplicity.). Finally, we let denote the –extension of . Since is a finite sheeted cover, contains with finite index, and so is quasi-isometric to it, and thus . It is also not hard to see that there is a natural injection from .
We can now state Mosher’s key reduction of quasi-isometric rigidity from [Mos06].
Theorem 5.22 (Mosher).
The homomorphism is an isomorphism.
Very briefly, the proof of this theorem divides into two key steps. First, naturally maps not just to , but to the subgroup of coarsely fiber preserving quasi-isometries, . In [Mos03], Mosher proves that this is in fact an isomorphism, , whenever contains a pseudo-Anosov. Second, a general result of Farb and Mosher [FM00, Theorem 7.7(2)], proved using coarse algebraic-topology, ensures that has finite index in when is further assumed to be virtually free.
With Theorem 5.22 in hand, we see that proving quasi-isometric rigidity of reduces to proving that in has finite index (which is precisely what [Mos06, Problem 5.4] asks). Equivalently, this reduces to the following.
Lemma 5.23.
The subgroup has finite index.
Proof.
Observe that the defining quadratic differential for descends to a quadratic differential on (with at worst simple poles at the orbifold points). To see this, note that any pseudo-Anosov element descends to a pseudo-Anosov element (i.e. is a lift of ). The stable/unstable foliations for this pseudo-Anosov element are vertical/horizontal for (an affine deformation of) , and these descend to stable/unstable foliations for which are thus vertical/horizontal for ; thus, is the pull back of . Since the fixed points of pseudo-Anosov elements of are dense in , it follows that is contained in the stabilizer of . By [GM91], for example, determines the associated Teichmüller disk and thus the stabilizer of is the stabilizer of , and is therefore the maximal Veech group defined by . Since is a lattice Veech group, so is . Therefore, the inclusion of into this maximal Veech group of must have finite index. Since is a subgroup of this Veech group, is finite index as well. ∎
Remark 5.24.
Our proof here is similar to the proof for Kleinian groups that the relative commensurator of a (non-lattice, Zariski dense) geometrically finite Kleinian group is equal to the stabilizer of its limit set. In fact, from [KL07, Theorem 2.1], the limit set of in is precisely .
References
- [ABD21] Carolyn Abbott, Jason Behrstock, and Matthew Gentry Durham. Largest acylindrical actions and Stability in hierarchically hyperbolic groups. Trans. Amer. Math. Soc. Ser. B, 8:66–104, 2021.
- [ABO19] Carolyn Abbott, Sahana H. Balasubramanya, and Denis Osin. Hyperbolic structures on groups. Algebr. Geom. Topol., 19(4):1747–1835, 2019.
- [Ahl66] Lars V. Ahlfors. Fundamental polyhedrons and limit point sets of Kleinian groups. Proc. Nat. Acad. Sci. U.S.A., 55:251–254, 1966.
- [BBKL20] Mladen Bestvina, Kenneth Bromberg, Autumn E. Kent, and Christopher J. Leininger. Undistorted purely pseudo-Anosov groups. J. Reine Angew. Math., 760:213–227, 2020.
- [BHMS20] Jason Behrstock, Mark F. Hagen, A. Martin, and A. Sisto. A combinatorial take on hierarchical hyperbolicity and applications to quotients of mapping class groups. preprint, arXiv:2005.00567, 2020.
- [BHS17a] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Asymptotic dimension and small-cancellation for hierarchically hyperbolic spaces and groups. Proc. Lond. Math. Soc. (3), 114(5):890–926, 2017.
- [BHS17b] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Hierarchically hyperbolic spaces, I: Curve complexes for cubical groups. Geom. Topol., 21(3):1731–1804, 2017.
- [BHS19] Jason Behrstock, Mark Hagen, and Alessandro Sisto. Hierarchically hyperbolic spaces II: Combination theorems and the distance formula. Pacific J. Math., 299(2):257–338, 2019.
- [BHS21] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Quasiflats in hierarchically hyperbolic spaces. Duke Math. J., 170(5):–, 2021.
- [BL18] Anja Bankovic and Christopher J. Leininger. Marked-length-spectral rigidity for flat metrics. Trans. Amer. Math. Soc., 370(3):1867–1884, 2018.
- [Bow93] B. H. Bowditch. Geometrical finiteness for hyperbolic groups. J. Funct. Anal., 113(2):245–317, 1993.
- [Bow13] Brian H. Bowditch. Coarse median spaces and groups. Pacific J. Math., 261(1):53–93, 2013.
- [Bow18] Brian H. Bowditch. Large-scale rigidity properties of the mapping class groups. Pacific J. Math., 293(1):1–73, 2018.
- [CLM12] Matt T. Clay, Christopher J. Leininger, and Johanna Mangahas. The geometry of right-angled Artin subgroups of mapping class groups. Groups Geom. Dyn., 6(2):249–278, 2012.
- [DDLS21] Spencer Dowdall, Matthew G. Durham, Christopher J. Leininger, and Allesandro Sisto. Extensions of Veech groups I: A hyperbolic action. arXiv preprint arXiv:2006.16425v2, 2021.
- [DELS18] Moon Duchin, Viveka Erlandsson, Christopher J. Leininger, and Chandrika Sadanand. You can hear the shape of a billiard table: Symbolic dynamics and rigidity for flat surfaces. Preprint, to appear in Comment. Math. Helv., 2018.
- [DGO17] F. Dahmani, V. Guirardel, and D. Osin. Hyperbolically embedded subgroups and rotating families in groups acting on hyperbolic spaces. Mem. Amer. Math. Soc., 245(1156):v+152, 2017.
- [DHS17] Matthew Gentry Durham, Mark F. Hagen, and Alessandro Sisto. Boundaries and automorphisms of hierarchically hyperbolic spaces. Geom. Topol., 21(6):3659–3758, 2017.
- [DMS20] Matthew G Durham, Yair N Minsky, and Alessandro Sisto. Stable cubulations, bicombings, and barycenters. arXiv preprint arXiv:2009.13647, 2020.
- [DT15] Matthew Gentry Durham and Samuel J. Taylor. Convex cocompactness and stability in mapping class groups. Algebr. Geom. Topol., 15(5):2839–2859, 2015.
- [EF97] David B. A. Epstein and Koji Fujiwara. The second bounded cohomology of word-hyperbolic groups. Topology, 36(6):1275–1289, 1997.
- [Far98] B. Farb. Relatively hyperbolic groups. Geom. Funct. Anal., 8(5):810–840, 1998.
- [FM00] Benson Farb and Lee Mosher. On the asymptotic geometry of abelian-by-cyclic groups. Acta Math., 184(2):145–202, 2000.
- [FM02a] Benson Farb and Lee Mosher. Convex cocompact subgroups of mapping class groups. Geom. Topol., 6:91–152, 2002.
- [FM02b] Benson Farb and Lee Mosher. The geometry of surface-by-free groups. Geometric & Functional Analysis GAFA, 12(5):915–963, 2002.
- [GM91] F.P. Gardiner and H.A. Masur. Extremal length geometry of Teichmüller space. Complex Variables Theory Appl., 16(2-3):209–237, 1991.
- [Gre66] L. Greenberg. Fundamental polyhedra for kleinian groups. Ann. of Math. (2), 84:433–441, 1966.
- [Ham] Ursula Hamenstädt. Word hyperbolic extensions of surface groups. Preprint, arXiv:math.GT/0505244.
- [HHP20] Thomas Haettel, Nima Hoda, and Harry Petyt. Coarse injectivity, hierarchical hyperbolicity, and semihyperbolicity. arXiv preprint arXiv:2009.14053, 2020. To appear in Geom. Topol.
- [HO13] Michael Hull and Denis Osin. Induced quasicocycles on groups with hyperbolically embedded subgroups. Algebr. Geom. Topol., 13(5):2635–2665, 2013.
- [HRSS21] Mark F. Hagen, Jacob Russell, Alessandro Sisto, and Davide Spriano. Equivariant hierarchically hyperbolic structures for 3-manifold groups via quasimorphisms. In preparation, 2021.
- [JS79] William H. Jaco and Peter B. Shalen. Seifert fibered spaces in -manifolds. Mem. Amer. Math. Soc., 21(220):viii+192, 1979.
- [KL97] Michael Kapovich and Bernhard Leeb. Quasi-isometries preserve the geometric decomposition of Haken manifolds. Invent. Math., 128(2):393–416, 1997.
- [KL07] Autumn E. Kent and Christopher J. Leininger. Subgroups of mapping class groups from the geometrical viewpoint. In In the tradition of Ahlfors-Bers. IV, volume 432 of Contemp. Math., pages 119–141. Amer. Math. Soc., Providence, RI, 2007.
- [KL08a] Autumn E. Kent and Christopher J. Leininger. Shadows of mapping class groups: capturing convex cocompactness. Geom. Funct. Anal., 18(4):1270–1325, 2008.
- [KL08b] Autumn E. Kent and Christopher J. Leininger. Uniform convergence in the mapping class group. Ergodic Theory Dynam. Systems, 28(4):1177–1195, 2008.
- [KL12] Ilya Kapovich and Anton Lukyanenko. Quasi-isometric co-Hopficity of non-uniform lattices in rank-one semi-simple Lie groups. Conform. Geom. Dyn., 16:269–282, 2012.
- [Kob12] Thomas Koberda. Right-angled Artin groups and a generalized isomorphism problem for finitely generated subgroups of mapping class groups. Geom. Funct. Anal., 22(6):1541–1590, 2012.
- [Loa21] Christopher Loa. Free products of abelian groups in mapping class groups. arXiv preprint arXiv:2103.05144, 2021.
- [LR06] C. J. Leininger and A. W. Reid. A combination theorem for Veech subgroups of the mapping class group. Geom. Funct. Anal., 16(2):403–436, 2006.
- [Man05] Jason Fox Manning. Geometry of pseudocharacters. Geom. Topol., 9:1147–1185, 2005.
- [Mar74] Albert Marden. The geometry of finitely generated kleinian groups. Ann. of Math. (2), 99:383–462, 1974.
- [Mas70] Bernard Maskit. On boundaries of Teichmüller spaces and on Kleinian groups. II. Ann. of Math. (2), 91:607–639, 1970.
- [Min96a] Yair N. Minsky. Extremal length estimates and product regions in Teichmüller space. Duke Math. J., 83(2):249–286, 1996.
- [Min96b] Yair N. Minsky. Quasi-projections in Teichmüller space. J. Reine Angew. Math., 473:121–136, 1996.
- [MM99] H.A. Masur and Y.N. Minsky. Geometry of the complex of curves. I. Hyperbolicity. Invent. Math., 138(1):103–149, 1999.
- [MM00] H.A. Masur and Y. N. Minsky. Geometry of the complex of curves. II. Hierarchical structure. Geom. Funct. Anal., 10(4):902–974, 2000.
- [Mos03] Lee Mosher. Fiber respecting quasi-isometries of surface group extensions. preprint arXiv:math/0308067, 2003.
- [Mos06] Lee Mosher. Problems in the geometry of surface group extensions. In Problems on mapping class groups and related topics, volume 74 of Proc. Sympos. Pure Math., pages 245–256. Amer. Math. Soc., Providence, RI, 2006.
- [MS12] Mahan Mj and Pranab Sardar. A combination theorem for metric bundles. Geom. Funct. Anal., 22(6):1636–1707, 2012.
- [MT02] Howard Masur and Serge Tabachnikov. Rational billiards and flat structures. In Handbook of dynamical systems, Vol. 1A, pages 1015–1089. North-Holland, Amsterdam, 2002.
- [MW95] H.A. Masur and M. Wolf. Teichmüller space is not Gromov hyperbolic. Ann. Acad. Sci. Fenn. Ser. A I Math., 20(2):259–267, 1995.
- [Raf14] Kasra Rafi. Hyperbolicity in Teichmüller space. Geom. Topol., 18(5):3025–3053, 2014.
- [RST18] Jacob Russell, Davide Spriano, and Hung Cong Tran. Convexity in hierarchically hyperbolic spaces. arXiv preprint arXiv:1809.09303, 2018. To appear in Algebr. Geom. Topol.
- [Run20] Ian Runnels. Effective generation of right-angled artin groups in mapping class groups. arXiv preprint arXiv:2004.13585, 2020.
- [Rus21] Jacob Russell. Extensions of multicurve stabilizers are hierarchically hyperbolic. arXiv preprint arXiv:2107.14116, 2021.
- [Sch95] Richard Evan Schwartz. The quasi-isometry classification of rank one lattices. Inst. Hautes Études Sci. Publ. Math., (82):133–168 (1996), 1995.
- [Sis16] Alessandro Sisto. Quasi-convexity of hyperbolically embedded subgroups. Math. Z., 283(3-4):649–658, 2016.
- [Sis19] Alessandro Sisto. What is a hierarchically hyperbolic space? In Beyond hyperbolicity, volume 454 of London Math. Soc. Lecture Note Ser., pages 117–148. Cambridge Univ. Press, Cambridge, 2019.
- [Tan19] Robert Tang. Affine diffeomorphism groups are undistorted. preprint arXiv:1912.06537, 2019.
- [Thu86] W.P. Thurston. Geometry and topology of –manifolds. Princeton University Lecture Notes, online at http://www.msri.org/publications/books/gt3m, 1986.