Fixed points of compositions
of nonexpansive mappings:
finitely many linear reflectors111
Dedicated to Terry Rockafellar on the occasion of his 85th birthday
Salihah Alwadani,
Heinz H. Bauschke
and
Xianfu Wang
Mathematics, University
of British Columbia,
Kelowna, B.C. V1V 1V7, Canada. E-mail:
saliha01@mail.ubc.ca.
Mathematics, University
of British Columbia,
Kelowna, B.C. V1V 1V7, Canada. E-mail:
heinz.bauschke@ubc.ca.
Mathematics, University
of British Columbia,
Kelowna, B.C. V1V 1V7, Canada. E-mail:
shawn.wang@ubc.ca.
(April 26, 2020)
Abstract
Nonexpansive mappings play a central role in modern optimization and
monotone operator theory because their fixed points can describe
solutions to optimization or critical point problems.
It is known that when the mappings are sufficiently “nice”,
then
the fixed point set of the composition coincides with the intersection
of the individual fixed point sets.
In this paper, we explore the situation for compositions
of linear reflectors. We provide positive results, upper bounds, and limiting
examples. We also discuss classical reflectors in the Euclidean plane.
Keywords:
composition,
fixed point set,
isometry,
linear subspace,
projector,
reflector,
rotation
1 Introduction
Throughout, we assume that
is
a real Hilbert space with inner product
,
(1)
and induced norm .
A mapping is nonexpansive if
.
Nonexpansive operators play a central role in modern optimization
because the set of fixed points
often represents solutions to optimization or inclusion problems
(see, e.g., [3]).
A central question is the following
Given nonexpansive maps on with
,
what can we say about ?
Clearly,
(2)
Note that one cannot expect equality to hold in 2:
Example 1.1.
Suppose that . Then
while
.
However, equality in 2 does hold
for “nice” nonexpansive maps
such as averaged mappings (see, e.g., [3, Corollary 4.51])
or even strongly nonexpansive mappings (see [5, Lemma 2.1]).
In this note, we aim to study for certain mappings
that are not nice but that do have some additional structure. To describe this,
let us denote the projector (or nearest point mapping) associated
with a nonempty closed convex subset of by .
The corresponding reflector
(3)
is known to be nonexpansive (see, e.g., [3, Corollary 4.18]).
Note that
(4)
and that , so the class of
reflectors is “bad” (see Example1.1).
We also have
(5)
When is a hyperplane containing the origin, then
we shall refer to as a classical reflector.
Classical reflectors are basic building blocks:
indeed,
the Cartan-Dieudonné Theorem
(see, e.g., [6, Theorem 8.1] or
[10, Section 2.4]) states that
every linear isometry on is the composition of
at most classical reflectors.
A very satisfying result is available for two general linear reflectors:
Fact 1.2.
(See [2, Proposition 3.6].)
Let and be closed linear subspaces of .
Then
(6)
and
(7)
1.2 was used in
[2] to analyze the
Douglas–Rachford operator .
Note that !
It was shown that pointwise.
Iterating is actually a special case of employing
Rockafellar’s proximal point algorithm [9].
We also note that 1.2 provides an alternative explanation of
Example1.1: indeed, set in 1.2.
Then , , and
.
1.2
nurtures the hope that
there might exist a nice formula
for and that
there might be a way to recover
by projecting suitably.
Unfortunately, this hope was crushed with the following example:
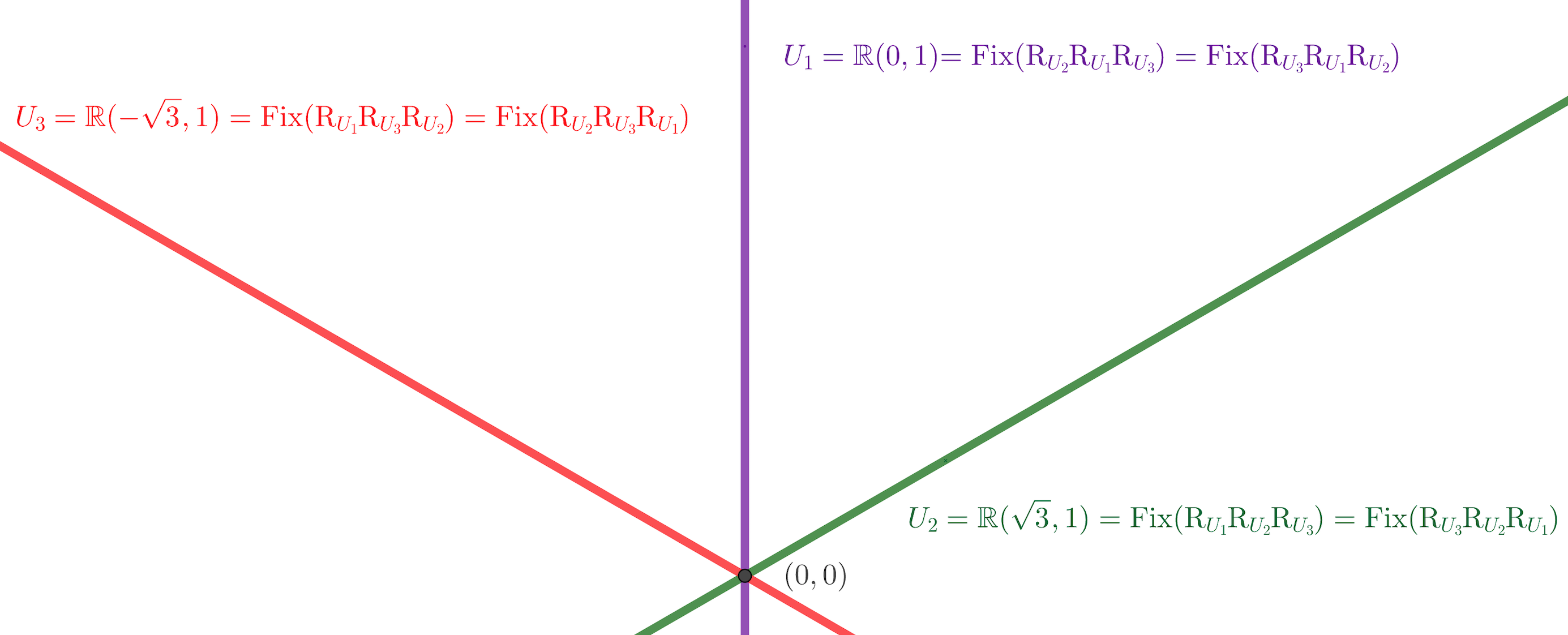
Example 1.3.
(See [1, Example 2.1].)
Suppose that ,
,
,
and .
Then
,
yet
.
The fixed point sets for all six permutations of the reflectors
are depicted in Fig.1.
We are now in a position to describe precisely our aim.
The goal of this note is to study the fixed point set of the composition of
finitely many reflectors associated with closed linear subspaces.
In Section2, we obtain several positive results
(see Lemma2.3 and Theorem2.6), an upper bound
(see Theorem2.7) as well as limiting examples.
Section3 focusses mainly on classical reflectors in the Euclidean plane
for which precise information is available.
The notation employed is standard and follows largely [3].
2 General results
We start with a simple observation.
Lemma 2.1.
Let be a closed linear subspace of . Then
(i)
(ii)
(iii)
.
Proof. We shall employ 5 repeatedly.
(i):
.
(ii):
.
(iii):
Combine (ii) with 4.
The following result, which is a consequence of Lemma2.1,
provides a case when
we have precise knowledge of the fixed point set of
the composition of three reflectors:
Proposition 2.2.
Let and be closed linear subspaces of .
Then
and thus
.
We now turn to operators and obtain a very general result which
clearly shows the effect of cyclically shifting a composition:
Lemma 2.3.
Let be arbitrary maps from to .
Then
(8a)
(8b)
(8c)
(8d)
(8e)
Proof. Let .
Then
and so
.
It follows that
(9)
The same reasoning gives
(10a)
(10b)
hence
(11a)
(11b)
(11c)
until finally
(12a)
(12b)
(12c)
(12d)
(12e)
Hence equality holds throughout (12)
and we are done.
Now is a subspace and thus
by the first part of the proof.
Remark 2.5.
Comparing Proposition2.2 and Proposition2.4,
we note that
it is
not necessarily true
that
;
indeed, see
Example3.3 below
for a concrete instance.
Hence, unlike the case of just two linear reflectors
(see 1.2),
the order of the operators does influence the fixed point set!
While Remark2.5 points out the importance of the order
of the operators, there does exist a nice permutation of the reflectors yielding
the same fixed point set.
To describe this result, observe first
because linear projectors and (hence) reflectors are self-adjoint.
Combining this with an old result by Riesz and Sz.-Nagy which states that
for any nonexpansive linear operator
(see [8, page 408 in Section X.144]
or [7]),
we obtain the following positive result:
Theorem 2.6.
Let be closed linear subspaces of .
Then
(15)
We now turn to three linear subspaces.
The next result narrows down the location of fixed points.
Theorem 2.7.
Let be closed linear subspaces of .
Then
(16)
and
(17)
Proof. Let .
Then
and 16 follows by expanding and simplifying.
In turn,
because
.
The approach utilized in the proof of
Theorem2.7 to derive the description of the fixed point set
also works for any odd number of reflectors; however, the resulting
algebraic expressions don’t seem to provide further insights.
The superset obtained; however, will easily generalize to
an odd number of reflectors:
Theorem 2.8.
Let
be an odd number of closed linear subspaces of .
Then
(18)
Proof. Let .
Then
.
Remark 2.9.
Theorem2.8 is false when is assumed to be even:
indeed,
assume that is a proper closed linear subspace of ,
and set .
Then
and hence
(19)
The next example shows that the upper bound provided in
Theorem2.8 is sometimes sharp:
Example 2.10.
Let
be closed linear subspaces of which
are assumed to be
pairwise orthogonal:
whenever .
Then either
(20)
or
(21)
Proof. Assume first that is odd.
Let
and set .
Write for each
(see 5).
Then
(22)
Hence
(23)
and further
(24)
In general, for , we have
(25)
In particular, because is even, we obtain
.
This completes the proof of 20.
Now assume that is even.
Set .
Then and is odd.
Therefore, we obtain 21 from
the odd case we just proved.
In contrast to Example2.10,
we conclude this section with another example which will
illustrate that the upper bound in Theorem2.8 is not always attained:
Example 2.11.
Assume that a closed linear subspace of such that
. Let be an odd positive integer, and
let . Then
set and for every .
Then is even and .
Hence
and therefore
(26)
3 The Euclidean plane
Let us now specialize the general result of the last section
to the Euclidean plane and classical reflectors.
We start with some is well known results whose statements can
be found, e.g., in [11].
Set
(27)
It is clear that is periodic, with minimal period .
The importance of stems from the fact that it
describes all classical reflectors on ; indeed,
(28)
for every .
It is convenient to also define
(29)
Note that for every ,
describes the counterclockwise rotation
by ; the operator is periodic with minimal period .
The following result provides “calculus rules”
for the composition of reflectors and rotators. It can be verified using
matrix multiplication and addition theorems
for sine and cosine.
Fact 3.1.
Let and be in .
Then the following hold:
(i)
.
(ii)
.
(iii)
.
(iv)
.
We are now in a position to classify the fixed point sets of
compositions of classical reflectors on :
Theorem 3.2.
Let be in .
Consider the composition of classical reflectors,
(30)
and set
.
Then exactly one of the following holds:
(i)
is odd,
, and
.
(ii)
is even,
,
and
Proof. We proceed by induction on , discussing the odd and even cases separately.
Base case:Case 1: Assume that .
Then and
so
by 28 as announced.
Case 2: Now assume that .
Then .
Using 3.1(ii), we obtain
and the claim follows.
Inductive step:
We assume that the result is true for some integer .
Then
(31)
and
(32)
Case 1: is odd; equivalently, is even.
Using the inductive hypothesis,
3.1(iv),
and 32, we obtain
(33a)
(33b)
and the result follows.
Case 2: is even; equivalently, is odd.
Using the inductive hypothesis, 3.1(ii),
and 32, we obtain
No matter which of the operators in
we apply to , we always obtain a line and
never the singleton
.
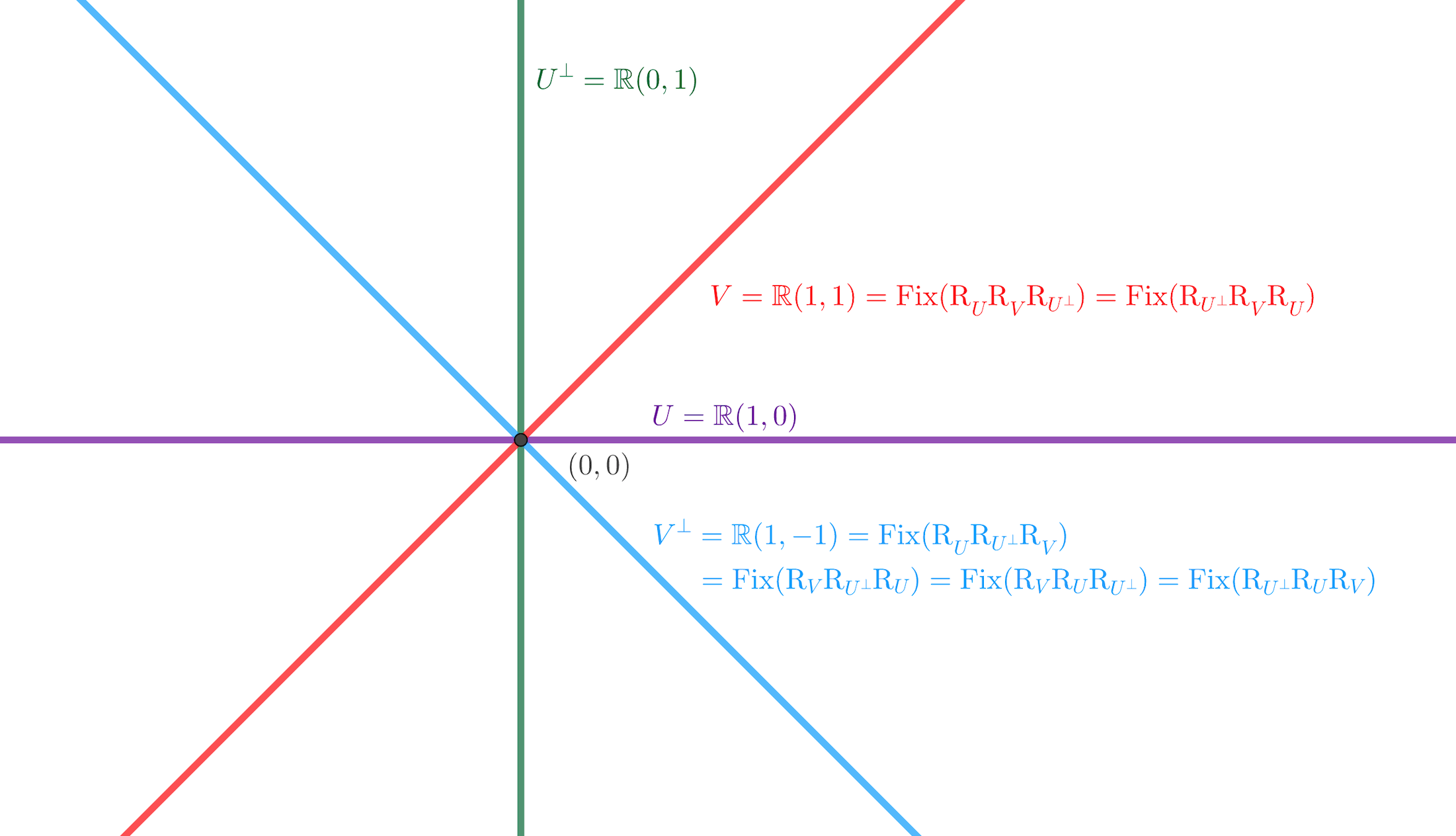
(ii)
If each , then
and .
If additionally , then
and we recover precisely Example1.3.
We conclude with a comment on higher-dimensional Euclidean space.
Remark 3.7( and beyond).
Considering reflectors and rotations
in (see, e.g., [12]) or even is more complicated because
there is no “easy”
counterpart of 3.1.
However, using the fact that eigenvalues of isometries are always drawn from
or from nonreal complex conjugate pairs of magnitude ,
one obtains at least the parity result that
(37)
for classical reflectors on .
Acknowledgements
The research of HHB and XW was partially supported by Discovery Grants
of the Natural Sciences and Engineering Research Council of
Canada.
References
[1]
F.J. Aragón Artacho, J.M. Borwein,
and M.K. Tam:
Recent results on Douglas-Rachford methods
for combinatorial optimization problems,
Journal on Optimization Theory and Applications 163 (2014),
1–30.
[2]
H.H. Bauschke, J.Y. Bello Cruz, T.T.A. Nghia, H.M. Phan,
and X. Wang:
The rate of linear convergence of the Douglas-Rachford algorithm for
subspaces is the cosine of the Friedrichs angle,
Journal of Approximation Theory 185 (2014), 63–79.
[3]
H.H. Bauschke and P.L. Combettes:
Convex Analysis and Monotone Operator Theory in Hilbert Spaces,
second edition, Springer, 2017.
[4]
H.H. Bauschke, H. Ouyang, and X. Wang:
Circumcentered methods induced by isometries,
Vietnam Journal of Mathematics, in press.
https://arxiv.org/abs/1908.11576
[5]
R.E. Bruck and S. Reich:
Nonexpansive projections and resolvents of accretive operators in Banach
spaces,
Houston Journal of Mathematics 3 (1977), 459–470.
[6]
J. Gallier:
Geometric Methods and Applications For Computer Science and Engineering
(Second Edition), Springer, 2011.
[7]
F. Riesz and B. Szökefalvi-Nagy:
Über Kontraktionen des Hilbertschen Raumes,
Acta Scientiarum Mathematicarum 10 (1943), 202–205.
[8]
F. Riesz and B. Szökefalvi-Nagy:
Functional Analysis,
Ungar Publishing New York, 1955.
[9]
R.T. Rockafellar:
Monotone operators and the proximal point algorithm,
SIAM Journal on Control and Optimization 14 (1976), 877–898.
[10]
J. Stillwell:
Naive Lie Theory,
Springer, 2008.