Fixed-time Synchronization of Networked Uncertain Euler-Lagrange Systems
Yi Dong and Zhiyong Chen
This work has been supported in part by Shanghai Municipal Science and Technology Major Project under grant
2021SHZDZX0100, in part by National Natural Science
Foundation of China under grant 62073241
and in part
by the Fundamental Research Funds for the Central Universities under grant 22120210127.Y. Dong is with College of Electronic and Information Engineering,
Tongji University, Shanghai 200092, China. Email: yidong@tongji.edu.cnZ. Chen is with with the School of Electrical Engineering and Computing,
The University of Newcastle, Callaghan, NSW 2308, Australia. E-mail:
zhiyong.chen@newcastle.edu.au
Abstract
This paper considers the fixed-time control problem of a multi-agent system composed of a class of Euler-Lagrange dynamics with parametric uncertainty and a dynamic leader under a directed communication network. A distributed fixed-time observer is first proposed to estimate the desired trajectory and then a fixed-time controller is constructed by transforming uncertain Euler-Lagrange systems into second-order systems and utilizing the backstepping design procedure.
The overall design guarantees that the synchronization errors converge to zero in a prescribed time independent of initial conditions.
The control design conditions can also be relaxed for a weaker finite-time control requirement.
Fixed-time control for multi-agent systems, requiring exact achievement of a collective behavior
in a prescribed time independent of initial conditions, or finite-time control of a weaker requirement allowing
the prescribed time dependent on initial conditions, has attracted researchers’ extensive attention over the past years due to its potential advantages in transient performance and robustness property [1].
The early work on finite-time formation control of single-integrator multi-agent systems can be found in [2].
For the leader-following consensus problem of general linear multi-agent systems, [3] proposed two classes of finite-time observers to estimate the second-order leader dynamics, which can work in undirected and directed communication networks, respectively.
More efforts have also been devoted to nonlinear systems. For example,
[4] considered the finite-time control of first-order multi-agent systems with unknown nonlinear dynamics, while
both first-order and second-order nonlinear systems were considered in[5]. In particular,
observer-based control was proposed to solve the leader-following fixed-time consensus problem
under the strongly connected communication network.
The fixed-time consensus problem was also investigated for double-integrator systems under directed communication network and
more general multi-agent systems with high-order integrator dynamics in [6, 7], respectively.
Euler-Lagrange systems capture a large class of contemporary engineering problems and
finite-time control of this class of systems has been intensively investigated, especially in
the individual setting. For example,
[8] considered finite-time control for an Euler-Lagrange system based on the method for a double-integrator system, while [9, 10] further dealt with nonlinear systems in the presence of uncertainties.
The work in [11] studied
a non-singular sliding surface and constructed a continuous finite-time control strategy for uncertain Euler-Lagrange system.
Furthermore, [12] designed an adaptive controller to track a desired trajectory in finite time and [13]
proposed a method for handing both uncertain dynamics and globally unbounded disturbances.
The research on fixed-time or finite-time control of uncertain Euler-Lagrange systems in a network setting is relatively rare.
Some related results can be found in [14] where, by adaptive control technique, a finite-time synchronization controller was constructed
for a multi-agent system modeled by some mechanical nonlinear systems
with a connected communication network.
The recent work reported in [15] studied finite-time coordination behavior
of a multiple Euler-Lagrange system with an undirected network in the absence of uncertainties.
In particular, with the introduction of auxiliary variables, the system can be converted into a simpler
form such that the adding a power integrator method can be applied to ensure the convergence.
This paper provides a solution to the leader-following fixed-time synchronization problem for multiple Euler-Lagrange systems with parametric uncertainty. The strategy is based on a class of observers that can accurately estimate a dynamic trajectory in a fixed time. The design relaxes the undirected and connected assumption for the communication network in [5, 7, 14, 15] and considers a directed network graph. Then an observer-based controller is proposed for the multi-agent system composed of a dynamic leader and multiple heterogeneous Euler-Lagrange dynamics,
as opposed to the finite-time control method for multiple special mechanical systems in [14].
In particular, the distributed control law is able to guarantee
each Euler-Lagrange system can track a desired trajectory in a prescribed time, independent of initial conditions.
It is worth mentioning that the control design conditions can be relaxed for a weaker finite-time control requirement.
Also, a reduced continuous controller can be directly applied to the fixed-time synchronization problem
for second-order nonlinear systems with a directed graph.
Throughout the paper, we use the following notations.
For a vector ,
represents its Manhattan () norm,
its Euclidean () norm,
and its element-wise absolute valued vector.
For a matrix , is also defined as its element-wise absolute valued matrix.
The power function operator is element-wise in terms of for .
For two vectors (matrices) and , comparison operators are element-wise;
for example, means for every
and , the -elements of and , respectively.
The operator
is defined for and the sign function .
II Problem Formulation
Consider a group of -link robotic manipulators of the following Euler-Lagrange dynamics
(1)
where , are the vectors of generalized
position and velocity of the -th robotic manipulator, also called agent ,
is a symmetric and
positive definite inertia matrix, contains the Coriolis and centrifugal forces, is the gravitational torque, and is the vector of control force.
The reference is generated by a leader system, called agent 0, described as follows:
(2)
where is the state, is the desired trajectory to track,
and , are constant matrices.
The multi-agent system under consideration is composed of the dynamics in (1) and the dynamic leader (2).
The information flow among all the agents is described by a digraph where
is the node set and is the edge set.
Each element represents
the edge from agent to agent .
For , , if and otherwise.
Let be the Laplacian matrix of the subnetwork composed of agents ,
where and for , .
The objective of this paper is to design a distributed control law such that each agent of (1) can track the desired trajectory in fixed time. More specifically, we
consider the class of control laws of the form
(3)
Let
Suppose the closed-loop system composed of (1), (2) and (3)
possesses unique solutions in forward time for all initial conditions.
Then the fixed-time synchronization problem can be described as follows based on
the concept of fixed-time stability [16].
Fixed-time synchronization problem: Given the system composed of
(1) and (2) with the corresponding
digraph , design a distributed control law of the form (3)
such that, for all initial conditions and ,
the equilibrium of the closed-loop system is (globally) fixed-time stable.
That is, the solution exists for and is Lyapunov stable, and moreover,
there exists a fixed time , independent of or , such that
(4)
Remark II.1
When the existence of a fixed time is relaxed to the existence
of a settling-time function , the above fixed-time synchronization problem
is called a finite-time synchronization problem, which is based on the definition of finite-time stability [1].
In practice, there is similarity between finite-time convergence and asymptotical (exponential)
convergence, both of which require the convergence of trajectories to (proximity of) an equilibrium point in a
finite amount of time which depends on the initial conditions. But
fixed-time convergence is a more practically interesting feature which requests
it happen in a prescribed time independent of initial conditions.
There are more constraints on the controller design conditions that will be studied in this paper.
For the solvability of the aforementioned problem, we need the following standard assumption on the communication network.
Assumption II.1
The graph contains a spanning tree with node 0 as the root.
Remark II.2
Under Assumption II.1, all the eigenvalues of have positive real parts; see, e.g., [17]. By Theorem 2.5.3 of [18], there exists a positive definite diagonal matrix such that is positive definite. Let be the smallest eigenvalue of and
. One has .
We end this section with some technical lemmas from, e.g., [6], [16], [19] and [20],
which will be used in the proofs of the main results in this paper.
(Lemma 1, [16])
Consider the system where
satisfies .
Suppose there exits a continuously differentiable function such that
(i) is positive definite and proper; and (ii) there exist real numbers
with and such that
.
Then, the equilibrium is (globally) fixed-time stable and there is a constant settling-time
.
III Distributed observer design
As the agents not connected to agent 0 do not have access to the information of the dynamic leader (2),
its state needs to be estimated by a properly designed fixed-time observer as follows:
(5)
In this section, we construct a lemma based on
the fixed-time observer (III).
Let
for the convenience of presentation.
Lemma III.1
Consider the system composed of (2) and (III) under Assumption II.1 with
, , and .
There exists a constant settling-time such that,
,
(6)
Proof:
Let , . The observer (III) can be rewritten as
(7)
Let and , , be the column stacks of , , , .
Note and
(8)
And, let
(9)
Along the trajectory of (8), the time derivative of satisfies
By Lemma II.4, the system (8) is fixed-time stable.
In particular, there exists a constant
such that
and
, .
Under Assumption II.1, we have and hence (6).
The proof is thus completed.
Remark III.1
When , the observer (III) reduces to a finite-time observer
(13)
Consider the system composed of (2) and (III.1) under Assumption II.1 with
, and .
There exists a settling-time function such that, ,
(14)
The proof of the above statement follows that of Lemma III.1
using simple arguments. In particular, we can obtain
In other words, is negative definite
for any .
By Theorem 1 in [1], the system (8) is finite-time stable.
In particular, there exists a finite settling-time function
such that
and
, , .
Under Assumption II.1, we have and hence (14)
for .
IV Robust Controller design
Based on the fixed-time observer (III),
we further propose a distributed robust control law to solve the leader-following fixed-time synchronization problem for
the multiple Euler-Lagrange systems.
It is assumed the model (1) contains uncertainties and the
terms , , and are not completely known, but they
satisfy the following bounded conditions
(15)
for some positive constants , , and .
Throughout the section, we consider every individual agent .
First, the equations in (1) can be rewritten as, with ,
which is a second-order system in the presence
parametric uncertainty, i.e., the terms , and are unknown for controller design.
Therefore, the conventional fixed-time control laws for second-order systems cannot be directly applied.
To introduce a new method, we perform the following transformation:
Also, let with and to be designed.
As a result, the above equations become
where .
Moreover, it can be put in a compact form
(16)
with
(17)
Inspired by [13], we construct a lemma that
motivates the design of .
Lemma IV.1
Consider the quantity defined in (17) with
the control law
(20)
(21)
for an arbitrary . Then,
holds for any .
Proof:
From the properties of Euler-Lagrange system, we have the following facts:
which will be used in the calculation below.
When , holds trivially. Otherwise, one has the following direct calculation
which completes the proof.
Remark IV.1
As the system dynamics considered in this paper contain uncertainties, a robust control
approach is used in the design of . In particular, to guarantee , which will be used
later for proof of convergence, is designed based on the boundaries of the uncertainties characterized
by (15) via high gain domination. It is worth noting that the control gains in become higher
if and are larger and/or is closer to 1 (corresponding to a bigger difference between and ), i.e., the size of uncertainties is larger.
It is a general principle in robust control that control gains depend on the size of uncertainties.
In practice, when system parameters cannot be precisely measured, a smaller range of uncertainties would be beneficial
for controller design.
With Lemma IV.1 ready for , the remaining task is to select a specific
and design such that the second-order system (16) is fixed-time stable, which is more complicated than finite-time control; see some existing methods in [5, 6],[21].
For solving such problem, we first introduce an explicit procedure of designing a set of parameters to be used for the controller design.
It is worth noting that these parameters are independent of system dynamics.
Let and be two specified rational numbers of ratio of two odd integers.
Define four constants
and four functions, for and ,
For the convenience of presentation, we also define
Next, pick
and two positive parameters
(22)
Now, it is ready to select
Then, pick
Finally, we select the following two parameters
(23)
With these parameters obtained, it is ready to have the following lemma.
Lemma IV.2
Consider the system (16) where is given in (21) with
(24)
and
(25)
Suppose the observer governing satisfies Lemma III.1.
If the control parameters
satisfy (22) and (23), then the equilibrium of (16) at the origin is fixed-time stable.
In particular, there exists a constant settling-time such that
(26)
Proof: For the convenience of proof,
we define the following variables
Let
Along the trajectory of th subsystem in (16), the derivative of satisfies
To simplify the presentation, we introduce the following operator
Then, using Lemma II.3 and a similar argument as (27) gives
and hence
(32)
By Lemma III.1, and hence for .
By Lemma IV.1, one has . Since and , , for and being two rational numbers of ratio of two odd integers and being the -th entry of ,
Thus,
(33)
Let
Under the conditions for , , , and ,
there exist and satisfying
and
Then, combining (29), (31), (32), and (33) gives, for ,
where
It is easy to verify the following inequalities
Therefore,
that implies
Similarly, one has
The above two inequalities conclude
Finally, based on Lemma III.1 and Lemma IV.2, we can obtain the following theorem for the solvability
of the fixed-time synchronization problem with .
Theorem IV.1
The fixed-time synchronization problem for
the multi-agent system composed of (1) and (2) under Assumption II.1 is solvable by the observer
(III) and the controller of the form
(21) and (25) with all the parameters given in Lemma III.1 and Lemma IV.2.
Remark IV.2
Suppose the sub-controller follows (21) with (24) but
the sub-controller (25) for reduces to the following finite-time controller,
by setting and ,
(36)
where is governed by the finite-time observer (III.1).
If is a ratio of two odd integers and satisfy
then the equilibrium of the closed-loop system composed of (16)
at the origin is finite-time stable. In particular, there exists
a finite settling-time function
such that
(37)
As a result, the finite-time synchronization problem for
the multi-agent system composed of (1) and (2)
under Assumption II.1 is solvable by the observer
(III.1) and the controller of the form
(21) and (36). The proof can similarly follow that of Lemma IV.2 and is thus omitted.
V An Example
Consider a group of six robotic manipulators given by (1) where and
for . In the equations, , , , represent unknown parameters.
The leader system is given by (2) with and .
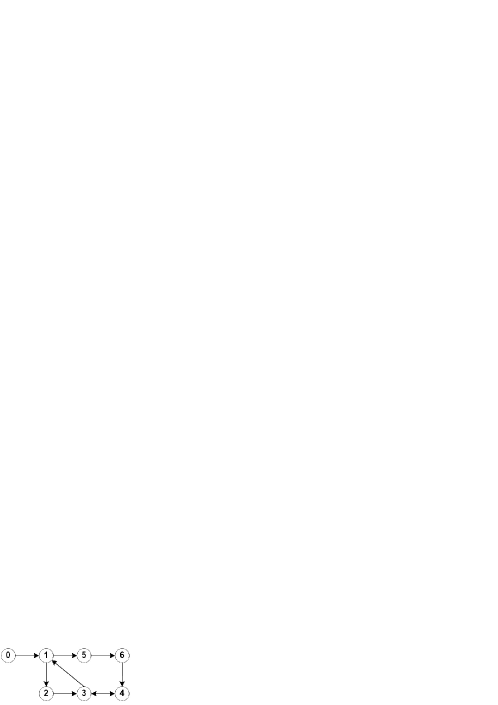
The information flow among all the subsystems and the leader is described by the digraph in Fig. 1, which contains a spanning tree with node 0 as the root, satisfying Assumption II.1.
Let . Then .
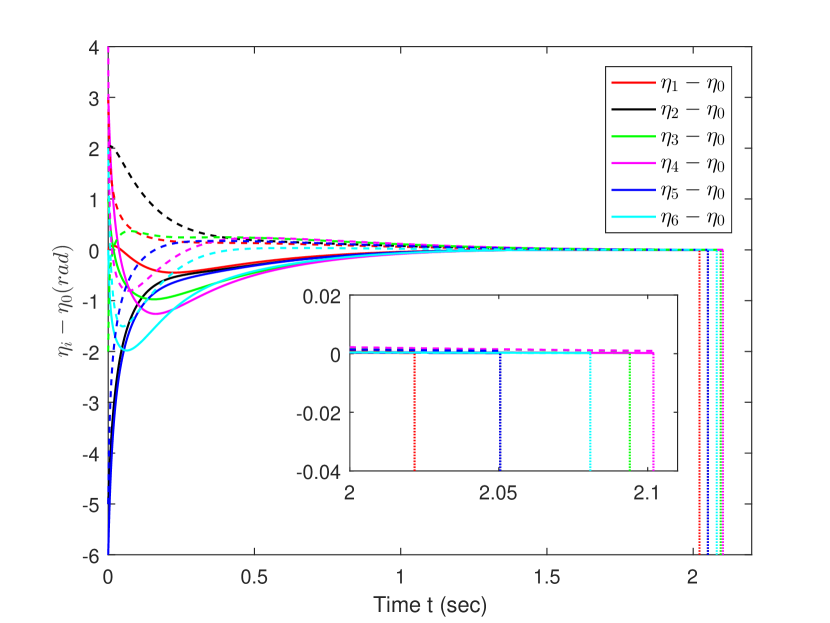
Figure 1: Illustration of the communication network topology.Figure 2: Profile of the estimation errors , ,
under the fixed-time observer.
By Lemma III.1, let
. Now we can construct the fixed-time observer (III) whose performance
is shown in Fig. 2. It is observed that the estimation errors , , approach zero at the
time instants marked by the vertical lines.
In the simulation, the error tolerance of numerical calculation is set as that is used as the criterion of approaching zero.
Next, we apply the observer (III) to solve the fixed-time control problem of Euler-Lagrange systems and design the fixed-time control law where is given by (21) and is given by (25). Although we we do not know the exact value of , and ,
it is assumed that the unknown parameters in the following ranges
, , , , and .
Simple calculation verifies that
the properties in (15) are satisfied for
, and .
We select the parameters in (21) and (25) as
.
For the purpose of simulation, we provide the values for uncertain parameters
, and .
The simulation is conducted with arbitrarily selected initial conditions.
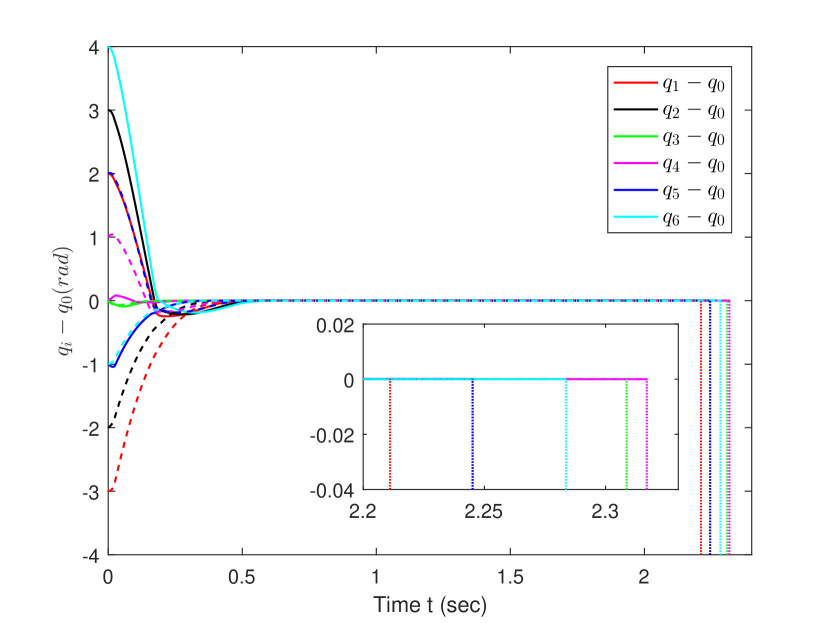
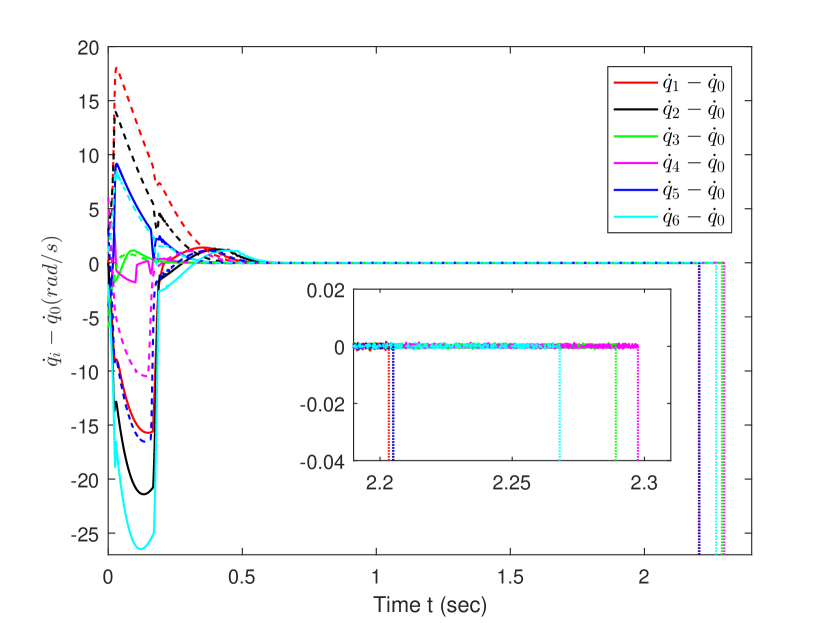
Fig. 3 shows , respectively converge to , in fixed time instants.
Figure 3: Profile of the synchronization errors and , , under the fixed-time controller.
VI Conclusion
This paper has proposed the fixed-time robust control design for the consensus problem of networked Euler-Lagrange systems based on a distributed observer, which is capable of estimating the desired trajectory of the leader in a fixed time under a directed graph. The heterogeneous uncertain Euler-Lagrange systems are converted into second-order systems by a partial design of the control law, and then the backstepping procedure for second-order systems are utilized to accomplished the fixed-time control design.
References
[1]
S. P. Bhat and D. S. Bernstein, “Continuous finite-time stabilization of the
translational and rotational double integrators,” IEEE Transactions on
Automatic Control, vol. 43, no. 5, pp. 678–682, 1998.
[2]
F. Xiao, L. Wang, J. Chen, and Y. Gao, “Finite-time formation control for
multi-agent systems,” Automatica, vol. 45, no. 11, pp. 2605–2611,
2009.
[3]
J. Fu and J. Wang, “Observer-based finite-time coordinated tracking for
general linear multi-agent systems,” Automatica, vol. 66, pp.
231–237, 2016.
[4]
Y. Cao and W. Ren, “Finite-time consensus for multi-agent networks with
unknown inherent nonlinear dynamics,” Automatica, vol. 50, no. 10,
pp. 2648–2656, 2014.
[5]
H. Du, G. Wen, D. Wu, Y. Cheng, and J. Lü, “Distributed fixed-time
consensus for nonlinear heterogeneous multi-agent systems,”
Automatica, vol. 113, p. 108797, 2020.
[6]
Z. Zuo, “Nonsingular fixed-time consensus tracking for second-order
multi-agent networks,” Automatica, vol. 54, pp. 305–309, 2015.
[7]
Z. Zuo, B. Tian, M. Defoort, and Z. Ding, “Fixed-time consensus tracking for
multiagent systems with high-order integrator dynamics,” IEEE
Transactions on Automatic Control, vol. 63, no. 2, pp. 563–570, 2018.
[8]
Y. Hong, Y. Xu, and J. Huang, “Finite-time control for robot manipulators,”
Systems & Control Letters, vol. 46, no. 4, pp. 243–253, 2002.
[9]
Y. Hong, J. Wang, and D. Cheng, “Adaptive finite-time control of nonlinear
systems with parametric uncertainty,” IEEE Transactions on Automatic
Control, vol. 51, no. 5, pp. 858–862, 2006.
[10]
X. Huang, W. Lin, and B. Yang, “Global finite-time stabilization of a class of
uncertain nonlinear systems,” Automatica, vol. 41, pp. 881–888,
2005.
[11]
S. Yu, X. Yu, B. Shirinzadeh, and Z. Man, “Continuous finite-time control for
robotic manipulators with terminal sliding mode,” Automatica,
vol. 41, no. 11, pp. 1957–1964, 2005.
[12]
D. Zhao, S. Li, and F. Gao, “A new terminal sliding mode control for robotic
manipulators,” International Journal of control, vol. 82, no. 10, pp.
1804–1813, 2009.
[13]
M. Galicki, “Finite-time control of robotic manipulators,” Automatica,
vol. 51, pp. 49–54, 2015.
[14]
J. Huang, C. Wen, W. Wang, and Y.-D. Song, “Adaptive finite-time consensus
control of a group of uncertain nonlinear mechanical systems,”
Automatica, vol. 51, pp. 292–301, 2015.
[15]
H.-X. Hu, G. Wen, W. Yu, J. Cao, and T. Huang, “Finite-time coordination
behavior of multiple Euler–Lagrange systems in cooperation-competition
networks,” IEEE transactions on cybernetics, vol. 49, no. 8, pp.
2967–2979, 2019.
[16]
A. Polyakov, “Nonlinear feedback design for fixed-time stabilization of linear
control systems,” IEEE Transactions on Automatic Control, vol. 57,
no. 8, pp. 2106–2110, 2012.
[17]
Y. Su, “Cooperative global output regulation of second-order nonlinear
multi-agent systems with unknown control direction,” IEEE Transactions
on Automatic Control, vol. 60, no. 12, pp. 3275–3280, 2015.
[18]
R. A. Horn, R. A. Horn, and C. R. Johnson, Topics in Matrix
Analysis. Cambridge University Press,
1994.
[19]
G. H. Hardy, J. E. Littlewood, and G. Pólya, Inequalities. Cambridge University Press, 1952.
[20]
C. Qian and W. Lin, “A continuous feedback approach to global strong
stabilization of nonlinear systems,” IEEE Transactions on Automatic
Control, vol. 46, no. 7, pp. 1061–1079, 2001.
[21]
Y. Song, Y. Wang, J. Holloway, and M. Krstic, “Time-varying feedback for
regulation of normal-form nonlinear systems in prescribed finite time,”
Automatica, vol. 83, pp. 243–251, 2017.