From cascades to -holomorphic curves and back
Abstract
This paper develops the analysis needed to set up a Morse-Bott version of embedded contact homology (ECH) of a contact three-manifold in certain cases. In particular we establish a correspondence between “cascades” of holomorphic curves in the symplectization of a Morse-Bott contact form, and holomorphic curves in the symplectization of a nondegenerate perturbation of the contact form. The cascades we consider must be transversely cut out and rigid. We accomplish this by studying the adiabatic degeneration of -holomorphic curves into cascades and establishing a gluing theorem. We note our gluing theorem satisfying appropriate transversality hypotheses should work in higher dimensions as well. The details of ECH applications will appear elsewhere.
1 Introduction
Let be a contact 3-manifold. We assume the Reeb orbits of are Morse-Bott and come in families, i.e. we have tori foliated by Reeb orbits, which we call Morse-Bott tori. Examples of this include the standard contact structure on the 3-torus, and boundaries of toric domains. See [HS06], [Cho+14]. (Toric domains are also called Reinhardt domains in [Her98].)
In this setup, one would like to make sense of Floer theoretic invariants constructed via counting -holomorphic curves in the symplectization of our contact manifold, which we write as
In the above is the variable in the direction, is the symplectic form and is a (generic) almost complex structure compatible with .
However, most versions of Floer homology require the contact form to be non-degenerate. One way to get around this is as follows. We first fix a very large number , and consider the action filtered version of our Floer theory up to action . We will have embedded contact homology (ECH) in mind when we describe this process, but it also applies to other types of Floer theories assuming suitable transversality. For a Morse-Bott torus with action less than , which we write as , we perform a small perturbation of the contact form written as
for small, in a small fixed neighborhood of . Such perturbation requires the information of a Morse function , with two critical points. After this perturbation we also need to change the almost complex structure to to make it compatible with the new contact form .
The effect of this perturbation is so that the Morse-Bott torus splits into two nondegenerate Reeb orbits corresponding to the critical points of , one elliptic and one hyperbolic, and that no other Reeb orbits of action less than are introduced. We perform this perturbation for all Morse-Bott tori of action less than . Then in this case, for at least up to action , we can define our Floer theory with generators as collections of non-degenerate Reeb orbits with total action and the differential as counts of -holomorphic curves connecting between our generators (the details of which Reeb orbits/holomorphic curves to consider depend on whichever Floer theory we choose to work with.)
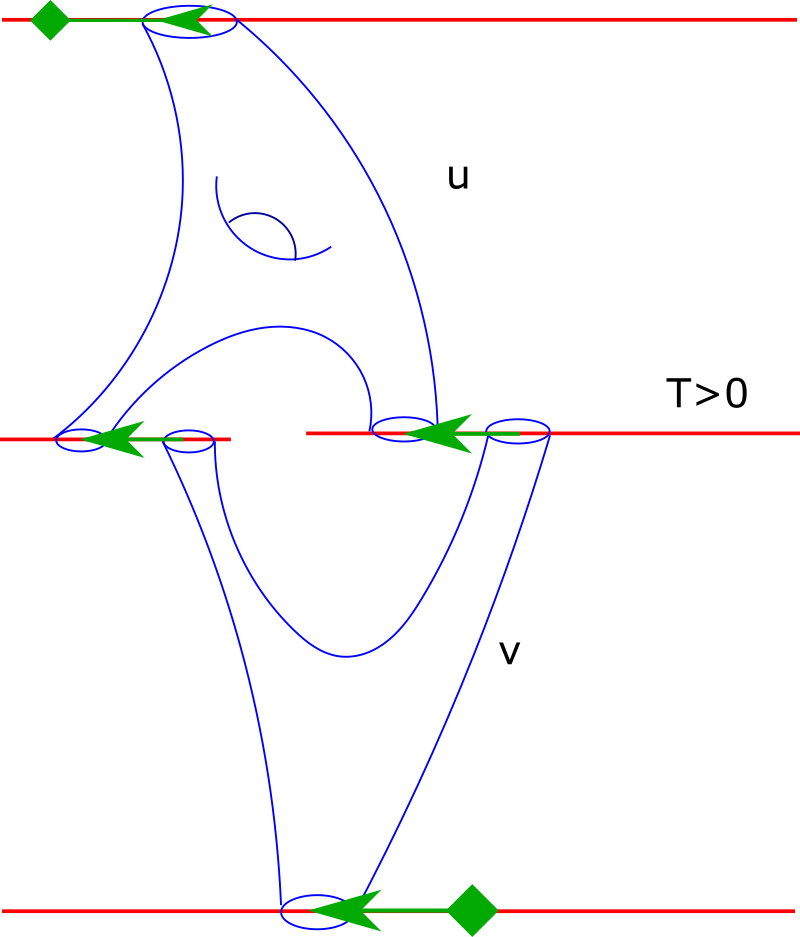
However, it is often desirable to be able to compute our Floer theory purely in the Morse-Bott setting, in part because often the count of -holomorphic curves is easier in the Morse-Bott setting. To this end, in order to find out what kind of objects that ought to be counted in the Morse-Bott setting, one can imagine turning the above process around. For given , we know how to compute our Floer theory up to action with the contact form via counts of a collection of -holomorphic curves, then we take the limit of , and see what kind of object our -holomorphic curves degenerate into. It turns out in this process -holomorphic curves degenerate into cascades [Bou02], [BO09],[Fra04], [Bou+03]. See Definition 2.7 for the definition of a (height 1) cascade, and Definition 2.9 for the more general case. For the purposes of our paper we only need to consider height 1 cascades. See Section 2 and the Appendix for a fuller explanation of setup and more precise definition of degeneration of -holomorphic curves into cascades.
Roughly speaking, a cascade consists of a sequence of (not necessarily connected) -holomorphic curves with ends on Morse-Bott tori. We think of the curves as living on different levels (for more precise definitions of level and height and their distinctions, see Definitions 2.7 and 2.9.) Between adjacent levels, say and , there is also the data of a number . The negative ends of and positive ends of are connected by gradient flow segments of length . Said differently, recall each family of Reeb orbits is equipped with a Morse function on , and if we start at a Reeb orbit reached by a positive puncture of , follow the upwards gradient flow of on (this means the family of Reeb orbits) for time , we will arrive at a Reeb orbit hit by a negative puncture of . The Reeb orbits hit by the positive punctures of and negative punctures of are connected to Reeb orbits on the Morse-Bott tori corresponding to critical points of via the upwards gradient flow. The definition of cascade being height 1 is simply that no flow time between adjacent curves and is allowed to be infinite. A schematic picture of a height 1 cascade (of two levels) is given in Figure 1.
We would then like a way to compute Floer homology purely in the Morse-Bott setting via enumeration of cascades. To prove that enumeration of cascades recovers the enumeration of -holomorphic curves in the non-degenerate setting, we would require a correspondence theorem between the two types of objects. The correspondence theorem will of course then involve gluing cascades into -holomorphic curves. We remark that we currently do not have the technology to glue together all cascades; there are issues pertaining to transversality: curves could be multiply covered, and even if they are somewhere injective and even after generic choice of , there could still be non-transverse cascades because we required all negative ends of meet positive ends of after flowing for a single time length, . In general it is convenient to think of a cascade as existing in a fiber product, and we require the fiber product to be transverse. Also we only concern ourselves with rigid cascades, and their correspondences with rigid holomorphic curves. For a more precise definition of transverse and rigid, as well as the description of this fiber product, see Definition 3.4. Our version of the gluing theorem should work for gluing higher index (transversely cut out) cascades, but making sense of a correspondence between two high dimensional moduli spaces could be much trickier. With the above preamble we state in a slightly imprecise way our main theorem:
Theorem 1.1.
Given a transverse and rigid height one -holomorphic cascade , it can be glued to a rigid -holomorphic curve for sufficiently small. The construction is unique in the following sense: if is a sequence of numbers that converge to zero as , and is sequence of -holomorphic curves converging to , then for large enough , the curves agree with up to translation in the symplectization direction.
See Definition 3.4 for the description of “transverse and rigid”. See Theorem 3.5 for a more precise formulation of this theorem.
Remark 1.2.
The purpose of Morse-Bott theory is usually that -holomorphic curves are often more easily enumerated in the Morse-Bott setting due to presence of symmetry. While cascades only contain -holomorphic curves in the Morse-Bott situation, counting them explicitly can be difficult in its own way. Even though rigid and transverse cascades are themselves discrete, they may be built out of curves that live in high dimensional moduli spaces. Since in principle arbitrarily high dimensions of moduli spaces can show up, one usually needs some extra simplifications for the enumeration of cascades to be tractable.
Remark 1.3.
Since we will have future applications to ECH in mind, we make some comments about our “transverse and rigid” condition versus the ECH index 1 condition:
-
•
In general restricting to cascades that have ECH index one (of course one first needs to extend the notion of ECH index one to cascades) and choosing a generic does not necessarily imply the cascades we get are transversely cut out. However there are special cases where transversality can be achieved by restricting to ECH index one cascades, and the correspondence theorem (Theorem 3.5) would allow us to compute ECH using an enumeration of -holomorphic cascades. Work in this direction is forthcoming in [Yao].
-
•
If we already had cascades that are transverse and rigid, from a gluing point of view, further restricting to the cascades that have ECH index one does not change very much: it just implies all the curves in the cascade are embedded (with the exception of unbranched covers of trivial cylinders) and distinct curves within each level do not intersect each other. We further have some partition conditions on the ends of holomorphic curves in the cascade, but again from a gluing point of view this does not make a difference.
1.1 Relations to other work
The idea of doing Morse-Bott homology certainly isn’t new. Methods of working with Morse-Bott homology predate the construction of cascades, and were described in [AB95], [Fuk96]. The construction of cascades was discovered independently in [Bou02] and [Fra04]. There were then a plethora of constructions of Floer-type theories using cascades (or in many cases, constructions very similar to cascades). For Lagrangian Floer theory, in addition to [Fra04], there was also [BC]. For symplectic homology, see [BO09]. See also [OZ]. For Morse homology, see [BH13], [Hur13]. For special cases of contact homology, see [HN19],[Nel20]. For the special case of ECH where the cascades can only have one level, see [CGH]. For abstract perspectives on Morse-Bott theory, see [Zho], [HN20]. Finally, the gauge theory analogue of ECH, monopole Floer homology, has a Morse-Bott version constructed in [Lin18], though there they do not use a cascade model.
For cascades there are two general approaches to show the Morse-Bott homology theory constructed agrees with the original homology theory. One way is to show the differential obtained via counts of cascades squares to zero, hence one has some homology theory. Then one shows that this homology theory is isomorphic to the original by constructing a cobordism interpolating the Morse-Bott geometry and the non-degenerate geometry. For standard Floer theory reasons this cobordism induces a cobordism map between the two homology groups. Also for standard Floer theory reasons we could show this cobordism map induces an isomorphism on homology. This is the approach taken in [Fra04], [BC].
The other approach is to directly show that non-degenerate holomorphic curves degenerate into cascades in the limit, and there is a correspondence between cascades and holomorphic curves. This degeneration of holomorphic curves into cascades is also sometimes called the adiabatic limit. This approach of computing Morse-Bott homology is taken in [BO09] [Bou02] [BH13] [OZ]. This is also the approach we take here. We prove the correspondence theorem under transversality assumptions (Definition 3.4), and will take up applications to ECH in a separate paper [Yao].
The reason we take the latter approach is that in ECH, which is the application we have in mind, everything except transversality is very hard. That the differential squares to zero requires 200 pages of obstruction bundle gluing calculations [HT07] [HT09], and a similar story must be repeated in the Morse-Bott case for showing the count of ECH index 1 cascades defines a chain complex. Constructing cobordism maps in ECH is even harder, and generally relies on passing to Seiberg-Witten theory. Cobordism maps on ECH defined purely using holomorphic curves techniques have only been worked out for very special cases [Roo], [Che21],[Ger20],[Ger]. Hence in light of these difficulties, it would seem the path of least resistance would be to prove a correspondence theorem and do the adiabatic limit analysis for ECH, despite this being a generally difficult approach.
We must highlight the relation of our work with [BO09], which produces a correspondence theorem in the case of symplectic homology. We borrowed heavily the techniques of that paper in the areas of analysis of linear operators over gradient flow trajectories (most notably the construction of uniformly bounded right inverses in the limit), as well as the degeneration of holomorphic curves into gradient trajectories near Morse-Bott tori. Both of these ideas have previously appeared in [Bou02] but were worked out in more detail in [BO09]. However, our construction of gluing is markedly different from [BO09], as we were unfortunately unable to adapt their approach. Instead, our approach of both gluing and proving the gluing procedure produces a bijection between cascades and holomorphic curves mirrors the approach of [HT07] [HT09], the two papers where Hutchings and Taubes show the differential in ECH squares to zero using obstruction bundle gluing. In particular, our approach can in fact be rephrased in terms of obstruction bundle gluing, see Remark 8.23, though in our case the obstruction bundle gluing is particularly simple and can be thought of as an application of the intermediate value theorem. For a formulation of this kind of gluing results in a simpler case in ECH where there is only 1 level in our cascades using obstruction bundle gluing, see the Appendix of [CGH], which we wrote jointly with Colin, Ghiggini and Honda.
We briefly outline the differences between our approach to gluing compared to those in [BO09], [OZ]. In [BO09], [OZ], the gradient trajectories connecting different levels of the cascade are preglued to the -holomorphic curves in the cascade; they consider the deformations of the entire preglued curve, and use the implicit function theorem to obtain gluing results. In our approach, in following the approach of [HT07], [HT09], the condition that a cascade can be glued to a -holomorphic curve is translated into a system of coupled nonlinear PDEs, which we loosely write as . Gluing is established by systematically solving this system of PDEs. How this is accomplished is explained first in a simplified setting in Section 6, then in the general case in Section 8.
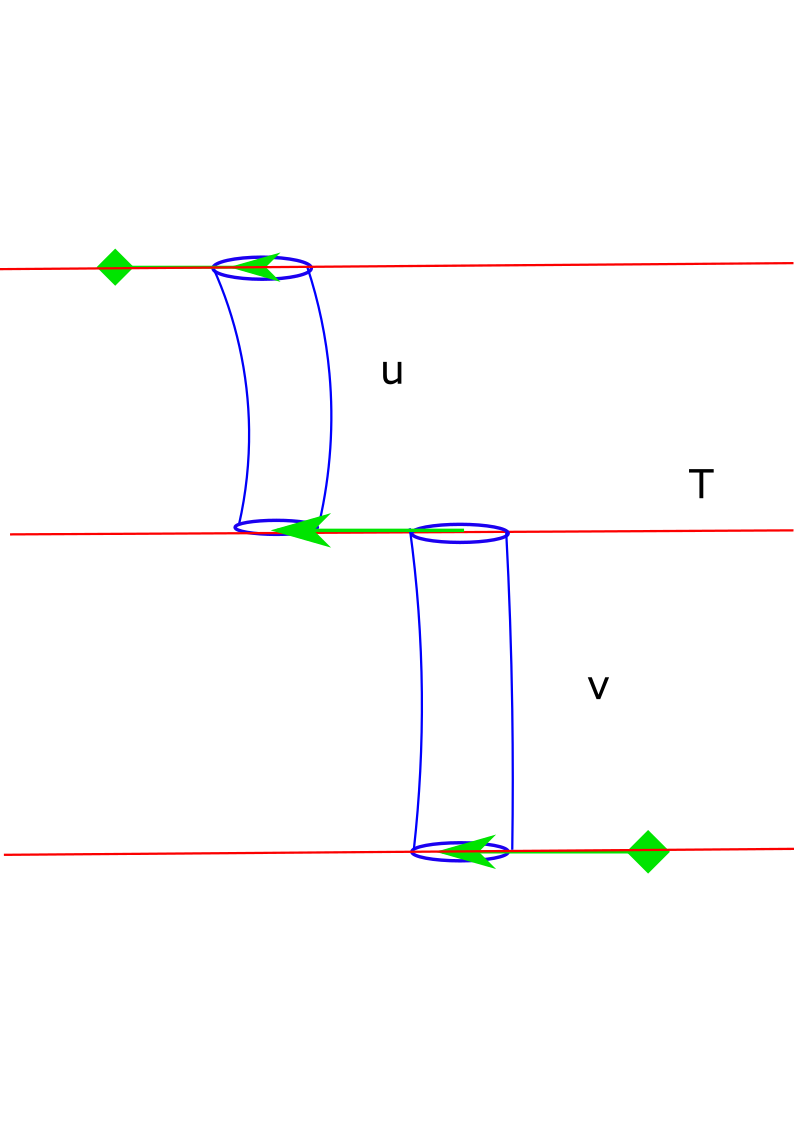
To say a bit more about this system of PDEs, we note that in this system there is a PDE for each -holomorphic curve that appears in the cascade, and a PDE for each upwards gradient trajectory. In some sense this allows us to think about deformations of -holomorphic curves and deformations of gradient trajectories separately from each other (of course in the end the equations are coupled, so this is only metaphorically true). The point is that in considering cascades, gradient trajectories and -holomorphic curves are in some sense different kinds of objects. For small values of , measured in a suitable norm, -holomorphic curves in the cascade are very close to being -holomorphic curves in the perturbed picture, but the gradient flow trajectories in the cascade come from very long gradient flow cylinders (their lengths go to as that follow a very slow gradient flow (the gradient flow of ). For a description of these cylinders see Section 4. The consequence of this is that deformations that appear to be small from the perspective of -holomorphic curves in the cascade can be extremely large from the perspective of gradient flow cylinders in the cascade. See Figure 2 and the accompanying explanations. Hence one benefit of our approach in writing down a system of equations is that then it becomes easy to keep track of which deformations are very large, and hence easy to understand the effects of these deformations on the equations in and the way different equations in the system are coupled to each other.
Finally, we remark that despite only working with Morse-Bott tori, we expect our approach to work for most Floer theories based on counts of holomorphic curves that do not have multiple covers or issues with transversality (both in the non-degenerate setting and the Morse-Bott setting). We expect the generalization from Reeb orbits showing up in families to higher dimensional families to be straightforward, and the rest of the analysis should carry over directly. However, we do not know how our analysis or proof of correspondence theorem interact with virtual techniques that are often used to define Floer theories when classical transversality methods fail.
1.2 Applications to ECH
As mentioned above the main application we have in mind of this work is the computation of Embedded Contact homology in the Morse-Bott setting. Previously several computations of ECH (or its related cousin Periodic Floer homology) have assumed results about Morse-Bott theory and cascades, for instance computations in [HS05], [HS06], [Cho16].
This paper does not contain the full construction of Morse-Bott ECH, but the analysis done here will lay the groundwork for constructing a correspondence theorem for ECH index 1 cascades and ECH index 1 holomorphic currents. This is the subject of a forthcoming paper, see [Yao].
However at this juncture we make several remarks about the construction. The condition of “transverse and rigid” for a cascade does not hold in general, even if we restricted to cascades that have ECH index 1 and used a generic . Hence in general ECH index one cascades might apriori have multiply covered components due to lack of transversality coming from the fiber products we used to define the cascades. However in simple cases where all ECH index one curves have genus zero, there is indeed enough transversality, and we expect the machinery developed here and [Yao] to fill in the foundations for Morse-Bott ECH for the computations in [HS05], [HS06], [Cho16], in which all ECH index one curves are shown to have genus zero.
For contact 3-manifolds, Morse-Bott degeneracy might also mean the Morse-Bott critical manifold is two dimensional, which means the manifold itself is foliated by Reeb orbits. The computation of ECH in that case was done using different techniques, see [NW], [Far11]. However, our methods (suitably extended to allow for the case where Reeb orbits can come in higher dimensional families) could potentially be applied to ECH computations in these cases as well.
1.3 Outline
The paper is organized as follows. After some quick description of the geometric setup, we describe in Section 2 how holomorphic curves in the non-degenerate case degenerate into objects we call cascades, and introduce a version of SFT type compactness, already introduced in [Bou+03], [Bou02]. We relegate the more technical definitions of convergence and proof of degeneration into cascades to the Appendix for the sake of exposition.
In Section 3 we establish what we mean by generic choice of , the definition of transversality, and in particular describe the set of cascades we will be able to glue into -holomorphic curves.
Then we get to the most technical part of the paper, in which we prove transverse and rigid -holomorphic cascades can be glued to -holomorphic curves as we perturb the contact form. We first start with some preamble on differential geometry in Section 4, and describe the gradient trajectories that arise from perturbing the contact form. We then find a suitable Sobolev space for the gradient trajectories which we will use for our gluing, and prove some nice properties of the linearized Cauchy Riemann operator in this Sobolev space for later use in Section 5.
To initiate the gluing, first as a warm up we explain how to glue a semi-infinite gradient trajectory to a -holomorphic curve in Section 6. This corresponds to gluing 1-level cascades to -holomorphic curves as we perturb the contact form from to , which is also done in [CGH]. We then prove an important property of the curve we constructed in this process, i.e. the solution exponentially decays along the gradient trajectory. This is done in Section 7, and will be crucial for gluing together multiple level cascades.
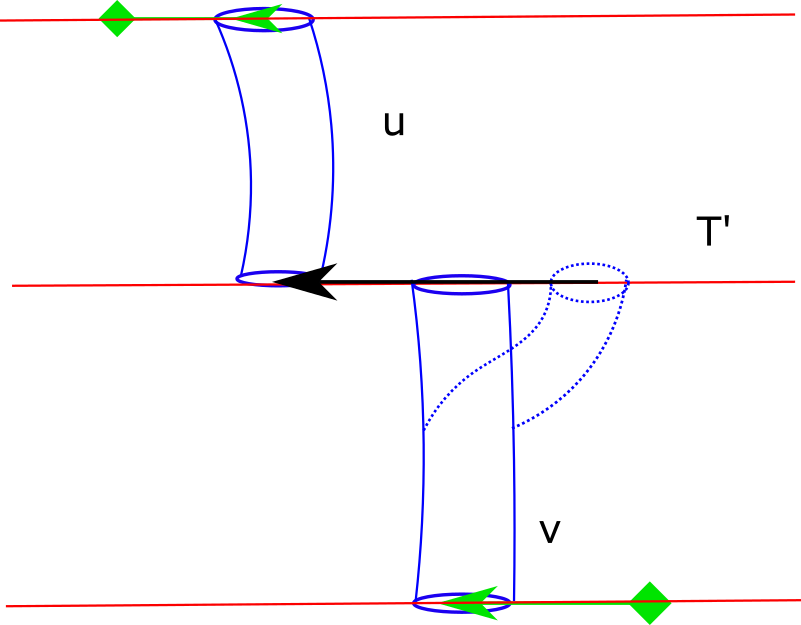
Section 8, we complete the gluing construction. We first consider the simplified case of gluing together 2-level cascades, which will contain the heart of the construction and is markedly different from gluing semi-infinite trajectories. As before we first do some basic Sobolev space setup. The key idea is to first preglue, then use the solution constructed for semi-infinite trajectories to construct another pregluing on top of the original pregluing with substantially smaller pregluing error, and then use the contraction mapping principle one last time to turn the second pregluing into a genuine gluing. As illustrated in Figure 2, during the degeneration the gradient flow cylinders correspond to very long necks, and when we try to preglue a cascade, deformations that appear small from the perspective of -holomorphic curves in the cascade can become very large from the perspective of the preglued curve when we try to fit a gradient flow cylinder between adjacent levels of the cascade during the pregluing. So all of the complications in the gluing we mentioned above arise from trying to keep track of these deformations and finding a setup where all of the vectors that we see are sufficiently small, so that the contraction mapping principle can be applied.
After this, the generalization to multiple level cascades is mostly a matter of keeping track of notation.
In anticipation of proving bijectivity of gluing, we deduce some analytic estimates of how -holomorphic curves behave near Morse-Bott tori as we degenerate the contact form . This is done in Section 9. Much of this analysis is taken from the appendix of [BO09] where they work out a very similar case in symplectic homology. This kind of analysis has also appeared in [Bou02].
Finally we take up the bijectivity of gluing; for this step we largely follow the footsteps of [HT07] [HT09]. This is taken up in Section 10.
The appendix contains the necessary background to state the SFT compactness theorem required for our kind of degenerations, which was stated in [Bou+03] and proved in [Bou02]. A similar result also appears in [BO09]. We also provide a proof for completeness, which relies also on the analysis done in Section 9.
1.4 Acknowledgements
First and foremost I would like to thank my advisor Michael Hutchings for his consistent help and support throughout this project. I would also like to thank Ko Honda, Jo Nelson, Alexandru Oancea, Katrin Wehrheim and Chris Wendl for helpful discussions and comments.
I would like to acknowledge the support of the Natural Sciences and Engineering Research Council of Canada (NSERC), PGSD3-532405-2019. Cette recherche a été financée par le Conseil de recherches en sciences naturelles et en génie du Canada (CRSNG), PGSD3-532405-2019.
2 Morse-Bott setup and SFT type compactness
Let be a contact 3-manifold with Morse-Bott contact form . Throughout we assume all Reeb orbits come in families; hence we have tori foliated by Reeb orbits, which we call Morse-Bott tori.
Convention 2.1.
Throughout this paper we fix a large number , and only consider collections of Reeb orbits that have total action less than . This is implicit in all of our constructions and will not be mentioned further. We prove the correspondence theorem between cascades and -holomorphic curves up to action level , and then when we need to apply this construction to Floer theories we can take .
The following theorem, which is a special case of a more general result in [OW18], gives a characterization of the neighborhood of Morse-Bott tori. Let denote the standard contact form on of the form
Proposition 2.2.
be a contact 3 manifold with Morse-Bott contact form . We assume the Morse-Bott Reeb orbits come in families of tori, which we write as , with minimal period . Then we can choose coordinates around each Morse-Bott torus so that a neighborhood of is described by , and the contact form in this coordinate system looks like
where satisfies
Here we identify .
Proof.
This is implicitly in [OW18]. We need to apply the setup of [OW18] Theorem 4.7 to [OW18], Theorem 5.1.
In [OW18] Theorem 4.7, in their notation we have , , with coordinates , and . The foliation is given by . The contact form on the total space of the fiber bundle is given by . Our proposition then follows from Theorem 5.1 in [OW18] (we need to take another transformation to get our specific choice of contact form, our sign conventions for the contact form are different from those of [Bou02].) ∎
We assume we have chosen above neighborhoods around all Morse-Bott tori with action less than . By the Morse-Bott assumption there are only finitely many such tori up to fixed action . Next we perturb them to nondegenerate Reeb orbits by perturbing the contact form in a neighborhood of each torus.
Let , let be a smooth Morse function with max at and minimum . Let be a bump function that is equal to on and zero outside . Here is a number chosen for each small enough so that the normal form in the above theorem applies, and that all such chosen neighborhoods of Morse-Bott tori of action are disjoint. Then in a neighborhood of the Morse Bott torus , we perturb the contact form as
We can describe the change in Reeb dynamics as follows:
Proposition 2.3.
For fixed action level there exists small enough so that the Reeb dynamics of can be described as follows. In the neighborhood specified by Proposition 2.2, each Morse-Bott torus splits into two non-degenerate Reeb orbits corresponding to the two critical points of . One of them is hyperbolic of index , the other is elliptic with rotation angle and hence its Conley-Zehnder index is . There are no additional Reeb orbits of action .
Definition 2.4.
We say an Morse-Bott torus is positive if the elliptic Reeb orbit has Conley Zehnder index 1 after perturbation, otherwise we say it is negative Morse Bott torus. This condition is intrinsic to the Morse-Bott torus itself, and is independent of perturbations.
Proof of Proposition 2.3.
After we have fixed our local neighborhood near a Morse-Bott torus from Proposition 2.2, we get natural trivializations of the contact plane along the Morse-Bott torus given by the plane. With this trivialization in mind, the linearized return map takes either of the following forms 111This fact is referenced in Section 4 of [CGH], and Section 5 of [Hut16]. Section 3 of the paper [HWZ96] works out the detailed computation leading up to this result. We remark that in all of these three papers the linearized return map is lower triangular. This is because we have chosen different conventions. For instance in [HWZ96] they chose their coordinate to denote the family of Reeb orbits, and their coordinate to denote the normal direction to their Morse-Bott torus. Hence their contact form is written as . Our linearized return maps agree with theirs after we switch to their coordinate system.
-
•
Positive Morse-Bott Torus:
-
•
Negative Morse-Bott torus:
They are degenerate, but they admit a Robbin-Salamon index, see Section 4 of [Gut14]. The positive Morse-Bott torus has Robbin-Salamon index and the negative Morse-Bott torus has Robbin-Salamon index (see [Gut14], Proposition 4.9). Then the claims behaviour of Reeb orbits follow from Lemmas 2.3 and 2.4 in [Bou02]. ∎
Remark 2.5.
Later when we define various terms in the Fredholm index, they will depend on choices of trivializations of the contact structure along the Reeb orbits. We will always choose the trivializations specified by Proposition 2.2, and where the return maps take the form specified above. For notational convenience we will call this trivialization .
We also observe that after iterating the Reeb orbits in the Morse-Bott tori, their Robbin-Salamon indices stay the same. So up to action , in the nondegenerate picture, we will only see Reeb orbits of Conley-Zehnder indices in the set .
Let us consider for small the symplectization
We also consider the symplectization in the Morse-Bott case
We fix our conventions for almost complex structures for the rest of the article as follows:
Convention 2.6.
We equip with compatible almost complex structure (for purposes of tranversality Definition 3.4 we may want to take to be generic). We restrict to take the following form near a neighborhood of each Morse-Bott torus (if we are using the action filtration we can only require this condition for Morse-Bott tori up to action ). Recall each Morse-Bott torus has neighborhood described by , then on the surface of the Morse-Bott torus, i.e. , we require
Our requirement for is that it is compatible, and in a neighborhood of each Morse-Bott torus (resp. Morse-Bott tori up to action ), its restriction to the contact distribution agrees with the restriction of . See Remark 3.6 for additional comments for genericity.
For fixed large and small enough, all collections of orbits with total action less than are non-degenerate, and hence there are corresponding -holomorphic curves with energy less than with non-degenerate asymptotics. To motivate our construction, we next take to see what these -holomorphic curves degenerate into. By a theorem that first appeared in Bourgeois’ thesis [Bou02] (Chapter 4) and also stated in [Bou+03] (Theorem 11.4), they degenerate into -holomorphic cascades. (For a more careful definition see the appendix that takes into account of stability of domain and marked points, but the definition here suffices for our purposes).
Definition 2.7.
[Bou02] Let be a punctured (nodal) Riemann surface, potentially with multiple components. A cascade of height 1, which we will denote by , in consists of the following data :
-
•
A labeling of the connected components of by integers in , called levels, such that two components sharing a node have levels differing by at most 1. We denote by the union of connected components of level , which might itself be a nodal Riemann surface.
-
•
for .
-
•
-holomorphic maps with for , such that:
-
–
Each node shared by and , is a negative puncture for and is a positive puncture for . Suppose this negative puncture of is asymptotic to some Reeb orbit , where is a Morse-Bott torus, and this positive puncture of is asymptotic to some Reeb orbit , then we have that . Here is the upwards gradient flow of for time . It is defined by solving the ODE
-
–
extends continuously across nodes within .
-
–
No level consists purely of trivial cylinders. However we will allow levels that consist of branched covers of trivial cylinders.
-
–
With defined as above, we will informally write .
Convention 2.8.
We fix our conventions as follows.
-
•
We say the punctures of a -holomorphic curve that approach Reeb orbits as are positive punctures, and the punctures that approach Reeb orbits as are negative punctures. We will fix cylindrical neighborhoods around each puncture of our -holomorphic curves, so we will use “positive/negative ends” and “positive/negative punctures” interchangeably. By our conventions, we think of as being a level above and so on.
-
•
We refer to the Morse-Bott tori that appear between adjacent levels of the cascade as above, where negative punctures of are asymptotic to Reeb orbits that agree with positive punctures from up to a gradient flow, intermediate cascade levels.
-
•
We say that the positive asymptotics of are the Reeb orbits we reach by applying to the Reeb orbits hit by the positive punctures of . Similarly, the negative asymptotics of are the Reeb orbits we reach by applying to the Reeb orbits hit by the negative punctures of . We note if a positive puncture (resp. negative puncture) of (resp. ) is asymptotic to a Reeb orbit corresponding to a critical point of , then applying (resp. ) to this Reeb orbit does nothing.
Definition 2.9 ([Bou02], Chapter 4).
A cascade of height consists of height 1 cascades, with matching asymptotics concatenated together. By matching asymptotics we mean the following. Consider adjacent height one cascades, and . Suppose a positive end of the top level of is asymptotic to the Reeb orbit (not necessarily simply covered). Then if we apply the upwards gradient flow of for infinite time we arrive at a Reeb orbit reached by a negative end of the bottom level of . We allow the case where is at a critical point of , and the flow for infinite time is stationary at . We also allow the case where is at the minimum of , and the negative end of the bottom level of is reached by following an entire (upwards) gradient trajectory connecting from the minimum of to its maximum. If all ends between adjacent height one cascades are matched up this way, then we say they have matching asymptotics.
We will use the notation to denote a cascade of height . We will mostly be concerned with cascades of height 1 in this article, so for those we will drop the subscript and write .
Remark 2.10.
In this paper our families of Reeb orbits are parameterized by , and in particular there are no broken gradient flow lines on . In general, when the critical manifold (the manifold that parameterizes the Morse-Bott family of Reeb orbits) is more complicated, the notion of matching asymptotics between height one cascades mentioned in the above definition involves going from a Reeb orbit hit by a positive puncture of the top level of to a Reeb orbit hit by a negative puncture of the bottom level of via broken Morse trajectories on the critical manifold.
Remark 2.11.
Once we have given the definition of cascades, we must then describe what it means for two cascades to be equivalent to each other. The precise definition of when two cascades are equivalent to one another can only be more precisely stated after we have given the more precise definition of cascades in the Appendix, where we keep track of all of the marked points and punctures of each level. Essentially we simply need to adapt the definition of when SFT buildings are equivalent to one another as stated in [Bou+03] Section 7.2 by viewing gradient flow trajectories in cascades as extra levels. Here we just remark that for our gluing purposes this is not really an issue for us, all of the cascades we care about (see Definition 3.4) will have be somewhere injective -holomorphic curves, with the possible exception of unbranched covers of trivial cylinders, hence for us it will be obvious when two cascades are equivalent to one another.
Now we state informally our version of the SFT compactness theorem, the full version with a precise definition of convergence is stated in the Appendix.
Theorem 2.12.
A sequence of -holomorphic curves that have fixed genus, are asymptotic to the same non-degenerate Reeb orbits, and , has a subsequence that converges to a -holomorphic cascade of height .
Remark 2.13.
It is apparent, with the definition of convergence outlined in the Appendix, that if converges to a cascade of height , and all the curves in the cascade are somewhere injective (except unbranched covers of trivial cylinders), then this limit is unique up to equivalence.
3 Transversality
In this section we describe the necessary transversality hypothesis we need for gluing and the correspondence theorem.
We fix a metric that is invariant under which we shall use for linearization purposes. We require that it is of the form
in a neighborhood of each Morse-Bott torus.
We also note the following convention that will be followed throughout this paper:
Convention 3.1.
Since we will be doing a lot of gluing in the paper there is a lot of demand for various cut off functions. We fix once and for all our convention for cut off functions. We use the notation to denote a function with support in , all of its derivatives are also supported in this interval. is equal to on the interval , and over the interval it satisfies a derivative bound of the form , and likewise for the interval .
If we would want cut off functions that are equal to at either , we will write or . The behaviour of the cut off function on intervals (resp. ) is the same as the above paragraph.
Let denote a holomorphic curve from a punctured Riemann surface with positive (resp. negative) punctures labeled , the collection of which we denote by . For each puncture we fix cylindrical neighborhoods around the puncture of the form . The punctures of are asymptotic to Reeb orbits on Morse-Bott tori. There are moduli spaces, which we generally write as , of -holomorphic maps from , which can be specified as follows. For given puncture , we first specify which Morse-Bott torus that it lands on and with what multiplicity it covers the Reeb orbits on that Morse-Bott torus. Then we have the option of specifying whether this end is “free” or “fixed”, and each choice will lead to a different moduli space. By “free” end we mean elements in the moduli space can have their puncture be asymptotic to any Reeb orbit on with given multiplicity. By “fixed” end we mean elements in the moduli space must have their end land on a specific Reeb orbit in with given multiplicity. With this designation it will enough to specify a moduli space of -holomorphic curves. The virtual dimension of this moduli space with the above specifications, is given by (See Section 3 of [Wen10] or Corollary 5.4 of [Bou02])
| (1) |
where is the Euler characteristic, the first Chern class, is the Robbin Salamon index for path of symplectic matrices with degeneracies defined in [Gut14]. The letter denotes the embedded Reeb orbit the end is asymptotic to, with covering multiplicity .
To explain the notation we think of as being an element of the moduli space , and is the Fredholm index of . Implicitly when we write we are including the information of which punctures of are considered free/fixed. We also note in constructing this moduli space the complex structure of is allowed to vary.
This moduli space can be viewed as the zero set of a Fredholm map. We borrow the set up as explained in Section 3.2 of [Wen10]. To this end, consider the space of vector fields with exponential weights at the cylindrical ends of the form . We consider the map, following [Wen10]222In [Wen10] this operator is denoted by . Section 3.2
| (2) |
where is a direct sum of vector spaces for each puncture . For a positive puncture at a fixed end, it is 2 dimensional vector space spanned by vector fields
where is the symplectization coordinate. For negative punctures we use instead cut off functions .
For free ends we additionally include another asymptotic vector that displaces the ends along the Morse-Bott torus
where is as above, depending on whether this end is at a positive or negative puncture.
is a finite dimensional vector space corresponding to the variation of complex structure (in [Wen10] Section 3.1 it is called a Teichmuller slice). We note we have chosen the variation of complex structure to be supported away from the fixed cylindrical neighborhoods.
Remark 3.2.
It will later turn out very important to us we work with as our domain instead of . The reason for this is the analytical fact that product of functions is generally not in for , but products of functions remain in . In particular in Equation 17 we took one more derivative than usual due to translations of terms, and if we used spaces we would have ended up with products of functions.
Another possibility is working with the Morrey spaces in Section 5.5 of [HT09], where all products are allowed and the space has an -type inner product. In fact this is the approach taken in the Appendix of [CGH], and if we did this we might be able to avoid the awkward exponential factors of that appear in our subsequent exponential decay estimates.
If is stable, is somewhere injective, not a trivial cylinder, and of positive index, then for generic , the operator is surjective and its index is equal to the dimension of the moduli space , which is given by .
If is not stable and is not a trivial cylinder, still lives in a moduli space of dimension calculated by the index, after we quotient out by automorphisms of the domain. As an analytic matter we address this by adding some marked points to make the domain stable and make the appropriate modifications to Sobolev spaces, in the following convention:
Convention 3.3 (Stabilization of Domain).
Given a cascade , each of the may have components that are unstable, i.e. holomorphic curves whose domain are cylinders or planes. A main source of example is trivial cylinders. Since in this paper we are gluing curves as opposed holomorphic submanifolds, we stabilize these domains following Section 5 of [Par19] (see also [CM07] Section 4). For each -holomorphic curve whose domain is a cylinder, we first fix a surface that intersects the -holomorphic curve transversely at one point. We endow the -holomorphic curve with an additional marked point on its domain and require this marked point passes through . For a -holomorphic curve whose domain is a plane, we fix two disjoint surfaces , each of which intersects the -holomorphic curve transversely at a single point. We add two marked points to the domain and require the -holomorphic curve maps them to and respectively.
The effect of this is that we eliminate the reparametrization symmetry of the domain. This makes (subsequent) uniqueness statements unambiguous. We note here during the gluing construction, we will be performing large scale symplectization direction translations of each of the . We translate the surfaces along with in these large scale symplectization direction translations. We shall make no further remark on this point and henceforth assume all have domains that are stable.
For trivial cylinders there is a tad more to be said. If both ends are free then the moduli space is transversely cut out of index 1, where the one dimension of freedom is moving the the trivial cylinder along the Morse-Bott torus. With one end fixed the other free the moduli space is still transversely cut out of index zero. However with both ends fixed the operator is of index , yet obviously such trivial cylinders still exist. In this discussion we will only talk about trivial cylinders with at most one fixed ends.
We now come to the definition of what we call transverse and rigid cascade. It is these cascades that we will eventually glue.
Definition 3.4.
Suppose is a height 1 cascade that satisfies the following properties:
-
a.
All curves are somewhere injective, except trivial cylinders, which can be unbranched covers.
-
b.
The333We only consider , the case of requires different transversality assumptions and is handled by standard gluing methods. numbers satisfy .
-
c.
Given and , the ends of approach distinct Reeb orbits. For , and , the ends of approach distinct Reeb orbits.
-
d.
No end of land on critical points of , with the following exceptions:
-
(i)
If a positive end of lands on a Reeb orbit corresponding to a critical point of in the intermediate cascade levels, it must then be the minimum of . Suppose this orbit is . Furthermore, for all , has a trivial cylinder (potentially unbranched cover) asymptotic to and no other curves asymptotic to .
-
(ii)
If a negative end of is asymptotic to a Reeb orbit corresponding to a critical point of in the intermediate cascade levels, it must be the maximum of . Call this orbit . For all , has a trivial cylinder (potentially unbranched cover) asymptotic to and no other curves asymptotic to .
We call the chain of trivial cylinders all at a critical point of a chain of fixed trivial cylinders.
-
(i)
-
e.
We remove all chains of fixed trivial cylinders from . For the remaining curves, if an end of lands on a critical point of , we designate it as fixed, and if an end of avoids critical points of , we designate it as free. Then each can be thought of as living in a moduli space of -holomorphic curves. If the domain of is written as , this is the moduli space of -holomorphic maps from where we allow the complex structure to vary, but impose the same fixed/free conditions on the punctures as . We denote this moduli space by . Then is transversely cut out, and its dimension is given by .
-
f.
Again we assume we have removed all chains of fixed trivial cylinders and satisfy all of the previous conditions. Each comes with two evaluation maps, where refers to how many Reeb orbits are hit by free ends of at . Note . The evaluation map simply outputs the location of the Reeb orbit that an end of is asymptotic to on the Morse-Bott torus. If we let , and the map
(3) given by
(4) and the map
(5) given by
(6) are transverse at , then we say the cascade is transversely cut out.
-
g.
In particular if is transversely cut out, it lives in a moduli space that is a manifold. The manifold has dimension given by the following formula. Assuming again we have removed all chains of fixed trivial cylinders, then the dimension is given by
If is transversely cut out and , then we say is rigid. Note here we have quotiented by the action on each level.
-
h.
(Asymptotic matchings). 444 We describe the analogue of this construction in the nondegenerate case. Suppose and are both nontrivial somewhere injective transversely cut out rigid holomorphic cylinders in , and the negative end of approaches an embedded (nondegenerate) Reeb orbit with multiplicity , and the positive end of also approaches with multiplicity . Then there are distinct ways to glue and together, and we use asymptotic markers to keep track of this. This is explained in Lemma 4.3 of [HN16]. Our definition of matching is an analogue of this phenomenon for cascades, except we fit a gradient trajectory (or several segments of gradient trajectories connected to each other by trivial cylinders) between two non-trivial curves. Our notation for asymptotic markers is taken from Section 1 of [HT07].
Suppose is a nontrivial curve that appears on the th level, i.e. it is a component of , and a negative end of is asymptotic to a Reeb orbit . Suppose is the times multiple cover of an embedded Reeb orbit, . Consider the preimage of a point in of the covering map from to , which is a set of multiplicity that we write as . Consider the smallest such that contains a nontrivial curve that has a positive end that is asymptotic to a Reeb orbit that is connected to by the upwards gradient flow segments in . (If we allow several segments of gradient flow concatenated together with trivial cylinders in the middle555As explained in the proof of Theorem A.6 in the Appendix, we should really think of collections of trivial cylinders connected by finite gradient flow segments between them as being a single gradient flow segment that flows across different cascade levels..) The orbit covers some embedded Reeb orbit with multiplicity . Let denote the point in that corresponds to under the gradient flow, i.e. in the neighborhoods we have chosen for Morse-Bott tori, and have the same coordinate. Then the preimage of under the covering map is a set with elements, . A matching, which is part of the data of the cascade , is a choice of a function from to .
With the above conditions all satisfied, we say is a transverse and rigid height 1 cascade.
Now we are in a position to state our correspondence theorem:
Theorem 3.5.
For all sufficiently small, a rigid transverse cascade can be uniquely glued to a -holomorphic curve with non-degenerate ends.
The free ends in the level correspond to ends of that are asymptotic to Reeb orbits corresponding to the maximum of . The fixed positive ends of correspond to positive ends of that are asymptotic to the Reeb orbits at the minimum of . Similarly the free negative ends of correspond to negative ends of that are asymptotic to the Reeb orbits at the minimum of , and the fixed negative ends of correspond to negative ends asymptotic to Reeb orbits corresponding to the maximum of . The curve also has Fredholm index .
By uniqueness we mean that if is a sequence of numbers that converge to zero as , and is a sequence of -holomorphic curves converging to , then for large enough , the curves agree with up to translation in the symplectization direction.
Remark 3.6.
In Section 4 we will see that in perturbing from to , the almost complex structure will need to be perturbed to to ensure it is compatible with . We will specify how to perturb into near each Morse Bott torus in Section 4. We can in fact perturb to be different from away from the Morse-Bott tori as well. Our construction works as long as in norm the difference between and is bounded above by . We bring this up because we can choose a generic path between and as so that for generic , the glued curve is also transversely cut out. This will be useful for Floer theory constructions in [Yao], and will be explained in more detail there.
4 Differential geometry
In this section we work out the differential geometry surrounding the Morse-Bott tori. We first work out the Reeb dynamics, then we show two gradient flow trajectories of correspond to -holomorphic cylinders.
4.1 Reeb dynamics
We recall the local neighborhoood near a Morse-Bott torus: if is a contact 3 manifold with Morse-Bott degenerate contact form, near a Morse-Bott torus we have coordinates . Let
denote the standard contact form, then by Theorem 2.2 looks like
where satisfies
Next we perturb the contact form to
We assume we are working in a small enough neighborhood so that . We are interested in the Reeb dynamics on the torus .
Proposition 4.1.
On the torus , let denote the Reeb vector field of . We write it in the form where is the Reeb vector field of . Then the following equaitons are satisfied
and these two equations completely characterize the the behaviour of on the surface.
Proof.
From definition
hence we have
For the second equation,
If we look at the first term we see
Next we look at the second term
Combining the above two equations we get
Evaluate both sides with we see that
so we get
∎
In particular on the surface we can write
4.2 Almost complex structures and gradient flow lines
For we choose a generic almost complex structure that is standard on the surface of the Morse-Bott torus, i.e. . After we perturb to , we must perturb to to make the complex structure compatible with the new contact form. However we keep the same complex structure on the contact distribution, i.e.
We wish to understand what does to the Reeb vector field and the vector field in the symplectization direction. By definition
From the above we deduce
Next we consider -holomorphic curves constructed by lifting gradient flows of . Consider maps
defined by
and initial conditions
Proposition 4.2.
The map as defined above is a -holomorphic curve.
Proof.
Let . We apply the holomorphic curve equation to
∎
We observe since there are two gradient flow lines on , there are two -holomorphic curves as above corresponding to their lifts. Further:
Proposition 4.3.
The curve is transversely cut out. The same is true for unbranched covers of by cylinders.
Proof.
We use Theorem 1 from Wendl’s paper on automatic transversality [Wen10]. In the language of Theorem 1, , (only one end is asymptotic to Reeb orbits with even Conley-Zehnder index), there are no boundary components, and , hence
The same proof works for unbranched covers of as well. ∎
For future references, we record the form of the vector field
5 Linearization of over
In this section we define the linearization of the Cauchy Riemann operator over , the holomorphic cylinder constructed in the above section that corresponds to a gradient flow of . We also equip it with an appropriate Sobolev space on which the linearized operator is Fredholm. This is preparation for the gluing construction.
Convention 5.1.
For this point onward in the paper we will assume all gradient trajectories are simply covered for ease of notation. In practice they can be (unbranched) multiply covered. For any of the analysis we are doing this will not make any difference.
The point to note here is that if we see any finite gradient cylinders (or chains of finite gradient cylinders connected to each over by trivial cylinders) that are multiply covered connecting between two non-trivial curves in the cascade, the number of ways to glue is counted precisely by the number of different matchings (see Definition 3.4) we can assign to such a segment.
Fix a holomorphic cylinder (we make the dependence explicit), consider the space of vector fields over ,
We take a weighted Sobolev space
which is the with exponential weight , where is a small fixed number that only depends on the Morse-Bott torus. Here we can also use .
Note as given, these are vector fields with exponential decay as and exponential growth as . The end with exponential growth is not suited for nonlinear analysis of the Cauchy Riemann equation, but we will find them useful as a formal device so all our linear operators have the right Fredholm index and uniformly bounded right inverse. It will be apparent from our gluing construction that vector fields with exponential growth will not cause any difficulty. This is also the approach taken in [CGH]. The main result of the section is the following:
Proposition 5.2.
Let denote the linearization of along using metric . Then the operator
is a Fredholm operator of index 0. In particular it is an isomorphism. Further it has right (and left) inverse whose operator norm is uniformly bounded as .
The proof will occupy the rest of this section. The idea is for sufficiently small the -holomorphic curve is nearly horizontal, and hence can be approximated by a finite collection of trivial cylinders glued together. But the linearization of over a trivial cylinder is an isomorphism with inverse independent of , and by standard gluing theory of operators the operator glued from linearizations of over trivial cylinders has the properties described in the theorem.
5.1 Linearizations over trivial cylinders
Fix , which corresponds to fixing a Reeb orbit in the Morse-Bott torus. Consider the trivial cylinder at . The Cauchy Riemann operator (with unperturbed complex structure ) has linearization of the form
The matrix is the standard complex structure on , and is a symmetric matrix. Considered as an operator, we have
with exponential weight on both sides.
Lemma 5.3.
is an isomorphism.
Proof.
We consider this operator defined on instead of by using the isometry
The effect of this on the operator is
The operator given by has eigenfunctions with eigenvalues , and no eigenvalue is equal to zero. This shows is index 0 because there is no spectral flow. An element in the kernel of can be written in the form
but all must equal to zero because terms like have exponential growth on one end hence cannot live in . This implies is an isomorphism hence has an inverse, which we denote by . Note this inverse does not depend on . ∎
Observe since varies in a family, there exists such that
in operator norm for all .
5.2 Uniformly bounded inverse for
In this subsection we prove the main theorem of this section. This is inspired by analogous constructions in Proposition 4.9 in [BO09] and Proposition 5.14 in [Bou02].
Proof of Proposition 5.2.
We identify , the circle of Morse-Bott orbits, with , and we recall has critical points at and . WLOG we consider the corresponding flow from with end at , towards as and take .
Fix large, let , denote Reeb orbits on the Morse-Bott torus. Let denote the time it takes for to flow to , i.e. when . We implicitly take . We observe implicitly depends on and
We let denote the linearization of the operator at a trivial cylinder at . We define the parameter
Let be a cut off function equal to for and for . we define the “glued” operator
So we have on the interval by construction. Viewed as operators
we have
in operator norm with constant independent of or . It follows from the same spectral flow argument as above that is Fredholm of index 0. We now proceed to construct a uniformly bounded (as ) right inverse for it. Let denote inverses to , we first construct approximate inverse using the following commutative diagram
with splitting maps and gluing maps defined as follows: if , where
We see immediately has uniformly bounded operator norm as , and that its norm is also bounded above independently of . Let be a cut off function for and for and . If we define
We also see that is an uniformly bounded operator as and its upper bound on norm is independent of . We conclude has uniformly bounded norm as . We next show it is an approximate inverse to .
If we start with , with . We apply to it and observe away from the intervals of the form - which we think of the region where gluing happens,
so we focus our attention to an interval of the form , in which .
We observe over intervals of this form in operator norm, so when we apply to we get
In light of the above, in this region we have
with
and likewise for the term in weighted Sobolev norm. We also note , so we can write
for . But by the construction of and , we have in , so we have
in weighted Sobolev norm. So for sufficiently large values of , the operator is an approximate right inverse. Then we can define a true right inverse by
which also has uniformly bounded norm as . This in particular implies is surjective.
Finally using
in operator norm we see that is an approximate right inverse to because:
and hence has uniformly bounded right inverse as . ∎
Remark 5.4.
We proved for given acting on over fixed it has uniformly bounded right inverse. For our proof we assumed the exponential weight is of the form , but it should be apparent from our proof even as we translate the weight profile from to for any , the same proof goes through. Said another way, for any sufficiently small and any , the operator defined over with weight has a uniformly bounded inverse.
Remark 5.5.
In the above construction we implicitly fixed a parametrization of with respect to the variable, i.e. we picked out which point on the Reeb orbit corresponds to . We could also have changed this, resulting in a reparametrization of , of the form . For all such reparametrizations it is obvious continues to have uniformly bounded right inverse, and this upper bound is uniform across all possible reparametrizations in the variable.
6 Gluing a semi-infinite gradient trajectory to a holomorphic curve
In this section we glue a -holomorphic curve to a semi-infinite gradient trajectory . This is a simpler case of gluing for multi-level cascades, and properties of this gluing developed here and in the following sections will be used extensively in gluing together multiple level cascades. The novel feature of this gluing construction, which separates it from standard types of gluing constructions, is that we will make the pregluing dependent on asymptotic vectors. The general setup will follow that of Section 5 in [HT09], and in a sense we are doing obstruction bundle gluing, see also Remark 8.23. This approach to gluing has appeared in the Appendix of [CGH].
The section is organized as follows: in subsection 1 we first introduce the gluing setup. In subsection 2 we do the pregluing. In subsection 3 we take care of the differential geometry/estimates needed to deform the pregluing. Further, we write down the -holomorphic curve equation we need to solve, and split it into two different equations as was done in Section 5 of [HT09]. And finally in subsection 4 we solve both of these equations. We do not yet say anything about surjectivity of gluing and save it for the end when we discuss surjectivity of gluing in the general case.
6.1 Gluing setup
Let be a -holomorphic curve with only one positive puncture which is free, asymptotic to a Morse-Bott torus with multiplicity 1 (higher multiplicities are handled similarly). We choose local coordinates on around the puncture given by . We also assume is stable. Our assumptions are purely a matter of convenience since it will be apparent from our construction how to glue semi-infinite gradient trajectories with arbitrary number of positive/negative ends. We also assume (purely as a matter of notational convenience) that we have shifted our coordinates so that converges to the Reeb orbit at , and the critical points of are at with max at and min at . We assume is rigid, i.e. the operator
is surjective of index 1. It has a right inverse . Here . This is a 3 dimensional vector space with a given basis, we denote elements of this space by triples . The norm of elements is simply We will often write to mean this norm.
Convention 6.1.
We will generally use the symbol as a shorthand for the asymptotically constant vector field
This is generally the case when we use to deform curves, and the case later where the symbol appears in the equations . We will also sometimes to use the symbol to simply denote the tuple of numbers, . It will be clear from context what we mean.
We observe by definition decays exponentially (at a rate faster than , which we denote by , ) as .
Convention 6.2.
We use the following convention regarding and . The symbol , when written as will always be used to denote a rate of exponential decay that only depends on the background geometry, say the local geometry around the Morse-Bott torus. An example will be the rate of exponential convergence to a trivial cylinder of a -holomorphic curve asymptotic to a Reeb orbit. The lower case will be chosen to be independent of , and as usual much smaller than the distance between the nonzero eigenvalues of operator and 0. This is the exponential weight we will use in our weighted Sobolev spaces.
The rest of the section is devoted to proving the following:
Proposition 6.3.
For every sufficiently small, there is a -holomorphic curve that is positively asymptotic to the Reeb orbit obtained by gluing a semi-infinite gradient trajectory along the Morse-Bott torus to .
6.2 Pregluing
We make the pregluing dependent on the triple of asymptotic vectors . We first describe the neighborhood of . Recall we are working in a neighborhood of the Morse-Bott torus whose local coordinates in the symplectization are given by
where is displacement across Morse-Bott torus direction, is the vertical direction, symplectization direction, and Reeb direction. At the surface of , is the standard complex structure. The metric here is the flat metric, so we will simply “add” vectors together as opposed to taking the exponential map. The map comes in the form
where
of order , where is some fixed constant specific to Morse-Bott torus (). We also have
Then
Recalling the important parameter :
which we will take to be our gluing parameter, we cut off at and glue in a gradient trajectory satisfying
We observe that since , in the range of , the map remains almost a trivial cylinder, which can make precise by noting
We are now ready to define the pregluing. We define
The interpolation above should be chosen so that the difference between and the trivial cylinder of the form should be bounded by in norm.
We first observe the preglued curve is still defined on the same domain . It still has the same coordinate neighborhood near the unique positive puncture. As a warm up to considering the deformations of this preglued curve, we next measure how non-holomorphic this preglued curve is by applying to it.
Remark 6.4.
Here in constructing the domain for the pregluing we “rotated” our gradient trajectory (denoted by in Section 5) by to match . It is also possible to instead glue with by making the identification at . In this case we get back the same surface, however when we later glue over finite cylinders this will make a difference, as it corresponds to the same topological surface but a new complex structure on the preglued domain.
Convention 6.5.
We adopt the convention that for terms that are supposed to be small, e.g. uniformly bounded by (in say norms or any norm we care about), we just write the upper bound instead of the specific term in its entirety.
Proposition 6.6.
After we apply the operator to the preglued curve over the interval we get terms of the form
By or oftentimes , we mean a function of and occasionally also including the variables , whose derivatives are uniformly bounded. When we write we mean the absolute value of the numbers .
Note the term , which is the only term in this expression that is not “small”. Figuratively we can write this as
where
and
where we think of as a quadratic order term and as an error term.
Remark 6.7.
We first note that is holomorphic with respect to , but in the above theorem we applied the operator with respect to , which is responsible for the appearance of several error terms. Further since is not holomorphic with respect to , there is another error term that appears in the interior of , i.e. of size . Note no such error term appears in the interior region of This term is not very important because by our metric it is (uniformly) small, we will include it when we solve for the equation more globally.
Proof.
We first consider downwards of the pregluing region, in the region , the pregluing is simply consider , then after applying we get
To this end, observe so we get an expansion of the form . This is a bound, we will need a better bound since eventually the size of the vector will be measured with respect to weighted Sobolev norms. Observe is of the form
All terms decay like , except . But we observe by compatibility of , the term . Hence overall the second term is of the form
Next let’s include the effect of , now we have
This term has size and it only exists for length and disappears after the pregluing region. We clarify its dependence on various variables: it is of the form
and this is everything in the region . We observe by definition is -holomorphic in the region so we only need to look at the pregluing region to find rest of the pregluing error. It follows from the uniform boundedness of our interpolation construction in the pregluing that this error is of the form , whence we complete our proof. ∎
Remark 6.8.
The reason we are painstakingly computing all of these terms carefully (and in our subsequent computations) is because later we will be differentiating this entire expression with respect to so we must take note how our expressions depend on these asymptotic vectors.
6.3 Deforming the pregluing
Now that we have constructed , we deform it to try to make it -holomorphic. We recall a neighborhood of is given by: . We recall for there is an exponential weight . We already explained how to construct the pregluing with asymptotic vector fields . We fix , . Recall deformations of complex structure of the domain is away from the cylindrical neighborhood so does not affect our gluing construction for the most part, so unless it is explicitly needed for rest of this section we will drop it from our notation. Now for fix . Note this choice of Sobolev space is dependent on the asymptotic vectors . We equip the space with weighted Sobolev norm .
We fix cut off functions
and
We deform the pregluing via
| (7) |
The next proposition describes what happens to the deformed curve when we apply to it.
Proposition 6.9.
The deformed curve is -holomorphic if and only if the equation
is satisfied. and are equations depending on , and they take the following form
and
The forms of functionals are given in the course of the proof.
Remark 6.10.
We will write the equation and in two different forms, one form will make it easy to apply elliptic regularity, the other makes it easy to use the contraction mapping principle. It will be later crucial for us to use elliptic regularity, as when we do finite trajectory gluing we will lose one derivative by lengthening/shortening the domain of the neck, and we will use elliptic regularity to gain one derivative to make up for this. The key ingredient is to arrange things so that does not contain derivatives of , and does not contain derivatives of . We shall see that this requires some careful differential geometry to achieve.
Proof.
Step 0 We first prepare to write our equation in a way that makes apparent the elliptic regularity in the equation, then we will linearize everything to make linear operators appear. We first consider
in the region . We recall over in this region . Let’s use to denote for short. Then we are looking at the equation
We rewrite this in the following fashion
Recalling that in this region, we can write as
where we can further write
where and are smooth functions so that pointwise
| (8) |
and have uniformly bounded derivatives. If we introduce the modified cutoff functions,
Then we define to be
| (9) |
We make a few remarks about the important features of our definition of . We first remark by our cut off function , the equation becomes linear for , as all the quadratic terms have disappeared. This is desirable as we will be solving with with exponential weight . Usually having vector fields that grow exponentially is undesirable for doing analysis, but in our case where the vector field grows exponentially the equation is linear, and hence poses no problem for the solution for our equation. The deformed preglued curve also doesn’t see the segments of that grows exponentially by our choice of cut off functions.
We also remark that appears in a form that allows us to apply elliptic regularity as stated in Theorem 6.11, which we will need much later on.
The definition of is slightly more involved. From now on we think of as coordinates in the cylindrical ends of . Let denote the interpolation from to that starts at and finishes the interpolation process at . The difference between and in this interval is uniformly bounded in norm by over . Note also where is nonzero and , agrees with . Let us also consider
which we expand as
where the definition of is analogous to that of . We recognize that the first term is supported for whenever and is of size (in norm) . The term admits a similar expansion as above that gives
with satisfying the same norm bound as before. Then for we define to be
Note that we choose to agree with for . Then we observe by this construction over , the equation:
implies directly that the deformation of the pregluing under is holomorphic.
The definition of extends also naturally to as
as in this region the effect of vanishes. The extension of to the interior of is standard, albeit one also needs to take into account of deformation of complex structure in the interior of .
As promised the derivatives of does not appear in and vice versa. As written it is manifest that solutions of and satisfy elliptic regularity. We next rewrite them into a form that makes the linearizations of operators appear, and hence more amendable to fixed point techniques.
Step 2 We now establish an alternative form of , namely we take Equation 9 and expand the nonlinear terms. We get
where have the same properties as . Even though they are different functions, we will sometimes just write for convenience. We then can take
which we think of a quadratic term. There is no error term.
Step 3 The analogous expression for is more complicated, in part because we have to deal with asymptotic vectors and have to pull back everything to . We first focus on part of from which we can write this as
We loosely think of as the linearization, and the rest of the terms as quadratic perturbation. The quadratic terms
generally take the form: where is the function having the property of Equation 8 and uniformly bounded derivatives.
Next we consider what happens for , where takes the form
which we can rewrite as
We think of as the linear term, as the quadratic correction ( is just some function satisfying property of Equation 8), and the pregluing error, which was already estimated in the previous proposition.
We next wish to understand how the linear terms in the various segments of compare with the linearization of along , which we turn to in the next step.
Step 4 We first focus on . We are trying to compare the linearization term in to , which can be written as
We compare their difference. We first consider the linear term in with instead of , and in taking their difference we see terms of the form
In the first term above the difference is of the form where is coming from pregluing error. In the second term above we can write it as:
the second term coming from the difference between and .
Then we must take into accout the difference between and , this introduces terms of the form
This concludes our computations for the region. For , we repeat a similar procedure, we recall the linear term in in this region takes the form
As before to understand this difference we first replace instances of with , and get
where the terms of the form and came from the difference between and . Finally the effect of putting is to add a term of size:
Hence collecting all of the above computations, we can write
where we think of as the quadratic term and as the error term. They take the following forms:
and for
For we have
∎
We also need to version of elliptic regularity given in Proposition B.4.9 in [MS12], which we reproduce here.
Theorem 6.11.
Let be open domains in so that . Let be a positive integer and . Assume satisfies , and , then:
-
a.
If , , and weakly solves
(10) Then , and satisfies this equation almost everywhere.
-
b.
(11) where only depends on and .
Remark 6.12.
In what follows, ignoring for now our choice of cut off functions, we will think of in the following form:
where measured in norm we have,
We also have are both smooth functions whose derivatives are uniformly bounded, which in particular implies that the norm of and are bounded above by the norm of and .
In comparison with Section 5 of [HT09], our conditions on are slightly stronger than the condition in there called quadratic of type 2 because only the derivative of is allowed to appear. We will think of in the following form (note this is slightly different from above conventions):
Ignoring the precise details of cut off functions, we have (all norms below are the norm)
Analogous expressions for pointwise bounds for higher derivatives of also hold, essentially because comes from expanding a smooth function. For most of our purposes the bounds above will suffice.
Remark 6.13.
The terms and are viewed as error terms, so what is important is their relative sizes and not the constants appearing in front of them. In what follows we will not be too careful to distinguish and and similarly for .
6.4 Solution of
In this subsection we will finally solve the system of equations , . We will adopt the following strategy:
-
•
Given fixed , construct our lift of gradient trajectory, , which we preglue to .
-
•
For this fixed choice, we solve over using the contraction mapping principle to obtain an unique solution, .
-
•
Then we try to solve over . We do this via another contraction mapping principle with input variables . The function enters the equation, but as a dependent on these variables. As such, we need to understand how varies when we change . This is made non-trivial by the fact when we change variables , the deformation is not local, we are twisting/moving an entire semi-infinite cylinder. We will need to understand under these changes, how the terms that enter change. Hence to keep track of these changes, we will make certain identifications of bundles and so we can compare the solutions of different equations over the same space. Then from that we get from the perspective of the equation over , depends nicely on the variables .
-
•
We apply the contraction mapping principle over to solve .
Proposition 6.14.
Let be fixed and sufficiently small (small relative to the constants that describe the local geometry of Morse-Bott torus but fixed with respect to ). Let the tuple be fixed and in an ball around zero. Then we can view as an equation with input . This equation has an unique solution whose norm is bounded by
Furthermore, this solution is actually in , its norm is likewise bounded by .
Proof.
The equation we need to solve is
where is the linearization of along , which we previously denoted by . We dropped the subscript to make the notation manageable.
Let denote the inverse of . Now consider the map defined by
We note a solution to is equivalent to having a fixed point. We demonstrate a fixed point exists via the contraction mapping principle. Since has norm , the function viewed as a element in also has norm bounded above by , hence . Also we note for , , both of these being measured in norm.
If we let denote the ball in then by the above, we see sends to itself. We also see it satisfies the contraction mapping property. If then
Hence for small enough the conditions for contraction principle is satisfied, the map has a unique fixed point. Since is invertible, this is equivalent to having a unique solution.
We can estimate the size of this fixed point. Consider the equation
If we measure the size of both sides in we get
hence we get
The fact we can improve the regularity and bound the norm of follows directly from Theorem 6.11. ∎
We next need to solve . As we mentioned in the introduction to this subsection, we think of this equation taking place over , with input variables in an ball. We think of the term that appears as a dependent variable. From above we know that for each tuple there exists a unique solution of small norm. To apply the contraction mapping principle we need to see the derivative of with respect to the tuple behaves nicely as well. This is made nontrivial by the fact when we vary we are pregluing different gradient trajectories, hence the solution of takes place in different spaces. We take the approach of identifying all the solutions into one space, and that as vary the equation over the same space changes, and by understanding this change, we understand how the terms in change.
To this end we let the pair denote the vector space
with operator given by -the linearization of over . We first consider varying , and keeping . Let , then there is an obvious parallel transport map that sends
which is an isometry. Here we are using additive notation for parallel transport maps because the metric is flat. We denote its image by . Under this identification satisfies a different equation, which we denote by . This equation is of the form
If we write , then is given by
and the term has some mild dependence on depending on the local geometry of the Morse-Bott torus. The point here is that the term that enters directly can be identified with portion of solving . Hence to understand how feeds back into as we vary we only need to understand how the parametrized solutions solving the parametrized family of PDEs changes.
We would like to extend the previous discussion to include variations of . To do that we need the next lemma which concerns the differential geometry of the situation.
Lemma 6.15.
In our chosen coordinate system, let be a lift of gradient trajectory satisfying
and let be another lift satisfying
with then there exists a independent of such that:
for all .
Proof.
This is a fundamentally a statement about gradient flows. We recall satisfies the equation . If we reparametrize to be then it is simply a gradient flow of , then we have for all and all
where is independent of , and the claim follows. To verify the claim about and , we need to be a bit more careful. Assume we have re-chosen coordinates around so that on , we have and on .
This fixed choice of coordinate is independent of so our quantitative conclusions drawn from this coordinate system continues to hold in our original coordinate system up to a change of constant. Then we analyze the behaviour of and as , with the positive end being similar. For so that , and , since this is equivalent to
and
If we take large enough so that , we have the upper bound:
Hence we have a uniform upper bound in the integral of the form:
where is just some constant. Next for , the curves and enter the region where , and they satisfy the differential equation
so they satisfy
and likewise for , hence the difference between and satisfies
Since we are taking the right hand side can be bounded by
Hence for
and hence our conclusion follows. ∎
With the above calculations we have can extend the parallel transport map
defined by
which is also an isometry. The equation also pulls back to , the linearized operator given by
This is what would look like in the coordinates we chose for . The full equation looks like
The previous lemma ensures the coefficient matrices , , as well as are uniformly well behaved (say in norm) as we vary as . And as before the components of that enters can be identified with the component of . Combining the previous discussion, we have:
Proposition 6.16.
The derivative of the operator with respect to is well defined, and satisfies for a fixed constant
Further we have the bound:
In the above, is viewed as an operator , and is viewed as a map from and its derivative is a map over the same space.
The next step is to understand how varies with respect to the variables .
Proposition 6.17.
Fix , let (which for the purpose of this proof we abbreviate ) denote the solution of viewed as an element of . We can take the derivative of where . They satisfy the equations
where the norm is measured in for and in for , and for . See Remark 6.18 for the interpretation of terms .
Proof.
The fixed point equation looks like
This is really a family of equations over .
We first differentiate w.r.t. . Note unlike differentiating w.r.t. , the term is a Frechet derivative which should be viewed as a linear operator
and when we measure its norm it is the operator norm. When we write below we mean the operator defined by multiplication by etc. Differentiating both sides of the fixed point equation we have
where the norms of both sides are operator norms. To make sense of see Remark 6.18. We recall the norm of is bounded above by via the Sobolev embedding theorem, so the above equation can be rearranged to be
and this proves the claim for . We next consider the case , the cases for are analogous. We consider the equation
and differentiate both sides w.r.t. :
| (12) |
rearranging to get
The only new thing we need to estimate is which we calculate as
where and refer to how the functions and themselves depend on . The norms above are all in norm in the domain. Combining the above inequalities we conclude
The same proof works for .
∎
Remark 6.18.
As we mentioned in the course of the proof, the attentive reader might feel uneasy about the appearance of the term . The proper way to take this Frechet derivative is explained in Proposition 5.6 in [HT09]. The idea is to take the fixed point equation
Let and denote the derivative of the right hand side of the above equation with respect to respectively, then the derivative is defined to be , and sends . In light of this the composition is not at all problematic, and our estimates of norms continue to hold.
We take our approach to things because in the case of differentiation with respect to the parameters (say for for definiteness), the resulting derivative is a linear map from , and hence has a right to be viewed as an honest function in . It further satisfies an elliptic PDE as in Equation 12, which gives us estimates on its norms and exponential decay properties, which will be essential for our later purposes.
Remark 6.19.
We can actually show (and likewise for ) belongs in with the help of elliptic regularity. If we recall the form of written in Equation 9, we differentiate with respect to to see weakly satisfies an equation of the form
where is a smooth function. Using elliptic regularity we see that is in with norm bounded above by .
Finally we turn our attention to solving .
Proposition 6.20.
The equation has a solution.
Proof.
Recall we view as an equation with independent variables , and we have the surjective linearized operator
The equation over the entire domain can be written to be of the form
| (13) |
where is supported in the cylindrical neighborhood and the term is quadratic in and supported in and is described by Proposition 6.9 and supported in the cylindrical neck. We let denote a right inverse to . Then to find a solution to it suffices to find a fixed point of the map
Let denote the ball in . It follows from the fact is quadratic, our previous derived expressions for , , and our size estimate that for small enough, maps to itself. It further follows from the fact that and the explicit expressions of that is a contraction mapping, and hence a solution to exists. ∎
Remark 6.21.
The contraction mapping principle actually says the fixed point of is unique. However this does not mean the solution to is unique. If is not injective (which it never is if the curve is nontrivial due to translations in the symplectization direction, and if the curve is a free trivial cylinder there is also a global translation along the Morse-Bott torus), we could have chosen a different right inverse which leads to a (presumably) different solution of . We leave discussions of uniqueness of gluing to after when we glued together general cascades.
We note that even though the previous construction was only for one end, the construction works for arbitrary number of free ends.
Corollary 6.22.
Given a transversely cut out -holomorphic curve with free-end Morse-Bott asymptotics, the ends can be glued with semi-infinite gradient trajectories into -holomorphic curves.
Remark 6.23.
In the above we only glued gradient flows to free ends. We could have also glued in trivial cylinders to fixed ends. The only difference is instead of being spanned by it is only spanned by . The rest of the argument follows exactly the same way.
7 Exponential decay for solution of
Consider, in notation of previous section, for , then it is an equation of the form
where denotes the linearization of operator, and we loosely think of as an quadratic expression in and , see Remark 6.12.
In this section we study the properties of this solution, in particular, it exhibits exponential decay as for sufficiently small (exponential decay beyond what is imposed by the exponential weight ). This property will be crucial for our gluing construction for multiple level cascades.
The idea why undergoes exponential decay is the following: for sufficiently small, the gradient flow cylinder flows so slowly that locally the geometry resembles that of a trivial cylinder, and the usual proof that -holomorphic curve decays exponentially along asymptotic ends can be applied.
The section is organized as follows: We first remove the exponential weights from our Sobolev spaces and work instead in . Next we follow the strategy of [HWZ96a] Section 2(this strategy as far as we know also dates back at least to [Flo88], see Section 4, and is used frequently in various kinds of Floer homologies to prove exponential convergence), using second derivative estimates to derive the exponential decay, and finally we show the various derivatives of also decay exponentially.
7.1 Exponential decay for solutions of
We begin by studying the exponential decay of , then move on to study the exponential decay of its derivatives. First some setup that will be used for both cases.
7.1.1 Change of coordinates and setup
We study for , which takes the form
WLOG we assume and write instead of . It will be clear our analysis holds for any value of and later we will identify sections of with sections of via parallel transport.
Recall takes the form
Here we have made explicit the dependence of this term on the , which controls the background geometry. It also implicitly depends on , which we suppress from our notation. Here the functions satisfy (uniformly in ) , . For we have , . These bounds will be important to us in the subsequent estimates.
Next we change variables to i.e. by conjugation we remove the exponential weights on our space. We use the following diagram:
We use this to define the operator . In terms of actual equations it looks like this: if is the corresponding element of without exponential decay (i.e. ), then is the same as
where . We decompose as follows
where by we denote self adjoint operator associated with linearizing along Morse- Bott orbit plus due to the exponential conjugation
Consequently the eigenvalues of are bounded away from zero, say by a factor of .
Remark 7.1.
We will often change the value of from one line to another, as long as it is bounded away from zero. The choice of above depends somewhat on the choice of , because the operator has zero as an eigenvalue. With more careful estimates we can make the decay rate only depend on local geometry, but this won’t be necessary for us for purpose of gluing.
In the Section 10 we also use a to describe exponential decay behaviour of -holomorphic curve near a Morse-Bott torus, there the is genuinely independent of and only dependent on the local geometry, as will be apparent from our proofs.
is the perturbed correction to due to the fact we are using instead of . It has the form
where we use to denote matrices whose entries are uniformly bounded in (by abuse of notation we will later use them to denote other matrices where each of the coefficient terms is uniformly bounded).
7.1.2 Exponential decay estimates
Let us define
We shall show:
Proposition 7.2.
| (14) |
This proposition combined with the following proposition, will imply exponential decay:
Proposition 7.3 (Lemma 8.9.4 in [AD14]).
If for , then either:
-
•
,
-
•
as .
Proof of Proposition 7.2.
where when we write we implicitly take the integral over . The proof is long and we separate it into steps.
Step 1
Let us first determine .
This is given by
We recall we are not tracking the signs in front of the term since it will eventually be upperbounded. We look at the six terms, which we label by T1-T6, in the above expression one by one, we use bold to remind the reader which term we are referring to since the computation gets very long. Also when we upper bound terms from T1-T6 we are implicitly taking the absolute value of terms. We shall keep this convention for all proofs involving exponential decay.
T1 gives
This is because if we expand , with the collection of eigenbasis for , we have . We see this is greater than .
T2 is given by
The first term above is bounded in absolute value by
The second term satisfies
Hence for the T2 term we have the overall bound by
T3 satisfies
In the last line we used the fact and have norm uniformly bounded above by . T4 satisfies
T5 satisfies
as the second last line follows from previous computation. T6 satisfies
simply because is quadratic. Putting all these terms together we conclude
and this concludes the first step.
Step 2
We next compute
We will need to dissect these terms one by one. We label them T1-T3. For T1 recall
hence its derivative is a uniformly bounded matrix of norm . Here we are using the fact is the standard almost complex structure along the surface of the Morse-Bott torus. We also recall
When we take its derivative we get
Again we have
where denotes matrices with bounded entries. So the T1 term is given by:
The T2 term looks like
We can estimate the above using the same analysis as before ( behaves really similarly to since we only care about the factor in front, technically we will need to take a derivative of but in our case this is still upper bounded by multiplied by a uniformly bounded matrix). This shows all these terms combine to make the T2 term satisfy
Finally we look at the T3 term
where we used the elliptic estimate and (technically the version of elliptic regularity in [AD14] or [MS12] only applies to , but seeing everything we used above is local, that this implies corresponding bounds on is immediate). As before we need to estimate
The third term in the equation above is easily bounded above by
The first term is bounded by
The second term is similarly bounded by
thus the entire T3 term satisfies
then putting all of these terms together globally we have
for small enough and this concludes the proof. ∎
It still requires some work to go from this to exponential decay in the Sobolev spaces we want. The easiest way to do this is to realize our solution has norm bounded above by . Hence for small enough , its norm always below 1. This means norm bounds over intervals of form gives rise to norm bounds over this interval. Using a version of elliptic regularity found in Theorem 12.1.5 in [AD14] (there’s a typo in this version) or appendix B of [MS12], reproduced in Theorem 6.11, we conclude the exponential decay bounds can be improved to , which we can then turn to pointwise bounds. We summarize this in the following theorem:
Proposition 7.4.
For , ,
Note the here is not the same as from before.
More details of the elliptic bootstrapping argument is written up in Corollary 7.7.
7.2 Exponential decay w.r.t.
In this subsection we show the derivative of with respect to also decays exponentially. To explain the notation, we recall for each we can use the parallel transport map to transport to . We remove the exponential weights to view them as vector fields:
(we suppress the dependence on ), and for they satisfy equations
where is of the form
As before and take the form
The nonlinear term takes the form
where and and their derivatives (uniformly with respect to ) satisfy the assumptions listed in Remark 6.12 as well as Proposition 2.2.
We know from the above subsection that for each fixed , the vector field is exponentially suppressed as . In this subsection we show the derivative of this family of vector fields
is exponentially suppressed as , as this will be crucial for our applications in gluing together multiple level cascades. In this subsection we use to make explicit the dependence on , and use subscripts to denote the partial derivative with respect to . For this subsection we define
for small enough. This is comparable to the balls we have chosen (we can take them to be the same), and depends only on the local geometry near the Morse-Bott torus, and is in particular independent of . We write everything in terms of instead of . We next differentiate the defining equation for w.r.t to :
By elliptic regularity we can assume in this region is infinitely differentiable in , and its derivative is also infinitely differentiable in . Further the derivatives of are bounded in norm by norms of and . Now we observe that
because when we are differentiating w.r.t. we are really looking at how the coefficient matrices , behave w.r.t. , and this is determined by the local geometry and hence their variation is uniformly bounded. Hence by our definition of we have
Recalling the form of :
Here we have a dependence on both and since we are shifting the local geometry when we change . Thus
Hence the derivative of looks like
where and denote the derivative with respect to its first variable, namely . The appears because we are differentiating with instead of . The functions and have the same properties as and , i.e.
and has uniformly bounded derivatives with respect to each of its variables; similarly for .
and are the derivatives of and on their second variable. They are just bounded functions whose derivatives are also bounded.
Hence we can write
where
which essentially behaves like , and
Hence is obviously bounded pointwise by , and the derivatives of w.r.t are also bounded by the corresponding derivatives of and .
So the equation satisfied by is
The idea is to let
and repeat the proof of the previous subsection to show:
Proposition 7.5.
.
Proof.
The term involving behaves exactly the same way. So let’s examine
Step 1: The first term looks like
This is equal to
We have as before , we think of the terms in as error terms. We will introduce them one by one and show they are bounded. The first few are of the form (the list continues)
We shall resume our convention of using bold face letters T1-T3 to refer to the above terms. T1 can be bounded
For T2
T3 is bounded by
There are actually several ways to bound this term. The easiest way as above is to observe has norm , hence has norm bounded by , and hence has norm bounded by , hence the second term is bounded above by which implies the overall bound by the form of .
More terms that also appear in are given below:
The common feature with all of the above terms is that both inputs into the inner product are small, hence we can bound all of the terms above by
Using techniques already established when we considered exponential decay in the previous subsection, we can bound each of these above terms by (respectively)
This concludes the first step, in which we bounded all terms appearing in .
Step 2 We next compute
We label the above two terms by T1 and T2 respectively. We first examine T1. In order to make the sizes of various terms more apparent, we shall replace with
where the as it appears in each of the above terms may be different, but they are all uniformly bounded smooth functions of with uniformly bounded derivatives.
Similarly we shall replace with
with the same convention on as before. Finally we shall replace with
We examine various components of the T1 term, starting with
The operator for our purposes looks like , since the derivatives of the coefficient matrices with respect to are bounded by . Similarly behaves like so we have, using these estimates
We next estimate
where we used the fact norm of are all uniformly bounded by using elliptic regularity. The term is bounded by
which concludes the estimates for .
We next examine , which we can bound by
The second term in the above inequality is in turn bounded by
using techniques of the previous step. This concludes all bounds for .
We next turn to , which we bound by
To bound , we use
This concludes the bounds for , and consequently all of T1.
We now turn to T2. We first examine . It can be rewritten as
We recall that . Now in taking the adjoint we had to differentiate the coefficient matrices w.r.t the variable , but in our case would still take the same form. Hence these terms can be handled by entirely similar techniques as before, giving
We consider the remaining term . We can rewrite it as
Noting that essentially takes the same form as , the above term will resemble the terms we computed in step 1. Hence it is equal to
plus an error term which is uniformly bounded by
This gives bounds on all of the terms appearing in , from which we conclude that
for sufficiently small. ∎
We now switch to trying to understand , we can get this simply by rearranging terms in and realizing derivatives w.r.t versus differ by a factor of .
Corollary 7.6.
for (in our case we can take , we are just stating the corollary more generallly to indicate the decay starts at .)
It might seem unpleasant we are dividing by , but in practice by elliptic regularity (and the term we will be working with) we will have , so the decay really is of the form . Also in the cases that interest us the decay will be so large factors of size will become irrelevant.
Using the same argument as before has norm of size so our previous strategy of bounding norm with norm continues to work, so we obtain the bound:
Corollary 7.7.
For , we have
Here is different from the we chose previously. We will abbreviate this by writing as some more careful estimates can show the coefficient in front to be of order , similarly using elliptic regularity we can bound
Proof.
For completeness we explain how elliptic regularity is used. First using , we have
Using the fact norm of is , we have
Given this norm bound, we can use elliptic regularity and the fact satisfies an equation of the form
Here we are differentiating with respect to instead of so we are rescaling some of the above terms so that they have norm instead of .
From elliptic bootstrapping we have
where we used the exponential decay estimate of . Note we have slightly shrunk the domain to to use elliptic regularity. We can iterate this argument to show
and use Sobolev embedding theorems to obtain pointwise bounds as in the proposition. ∎
We also note the could have used the exact same techniques when applied to the asymptotic vector. There we need to identify , and . The result is very similar: we can obtain exponential decay bounds on , given as:
Corollary 7.8.
For , we have
We do not need such a result for the -asymptotic vector since the geometry is invariant in the direction.
8 Gluing multiple-level cascades
We have assembled all the technical ingredients we need to do gluing, which we take up in this section. We note gluing together cascades with finite gradient trajectories is substantially harder than semi-infinite gradient trajectories. We start with a simplified setup of gluing together 2-level cascades, which captures most of the technical difficulty. The generalization to level cascades is then a problem of linear algebra.
Our simplified setup is this: let be two rigid (nontrivial) -holomorphic curves. has one negative end, asymptotic to Reeb orbit ; and has one positive end, asymptotic to Reeb orbit . Both of these ends are on the same Morse-Bott torus, and in fact they are connected by a gradient trajectory of length . We will perturb to near this Morse-Bott torus (and nowhere else), and glue along with the finite gradient trajectory into a -holomorphic curve. This construction ignores the other ends of , which we assume to remain on other Morse-Bott tori, and we only have two levels. The reason for this is that the process of gluing together two -holomorphic curves along a finite gradient trajectory is very technical, and we would like to carry out the heart of the technical construction with as little extra baggage as possible.
This section is organized as follows: we first introduce the general setup and the process of pregluing. We, as before, show gluing can be realized by solving a system of three equations. We then proceed to discuss the linear theory required to describe the linearization of over the finite gradient trajectory. After that we show the feedback terms coming from and going into (defined in the subsection below) depend nicely on the input - this is the most technical step and will take some careful estimates. Finally after this we will be able to solve the three equations as we did in the previous section. Finally, we explain the generalization to -level transverse index one cascades.
8.1 Setup and pregluing
Recall near the Morse-Bott torus we have coordinates . For definiteness we assume is the Reeb orbit with coordinate and is at . To simplify notation we assume we have rescaled the coordinate so that over the interval on connecting and .
We recall for each we choose a cylindrical neighborhood around each of its punctures . We also recall near our punctures has the coordinate form
We assume and . For each we describe a neighborhood of this map as
where is the weighted vector space of vector fields with weight at positive/negative punctures. We use to denote a Teichmuller slice. We use to denote asymptotic vectors at other ends of , and is the end that we are considering, being a 3 dimensional space consisting of vectors .
We recall the important gluing constant
which we think of our gluing parameter.
Let be a gradient trajectory suitably translated so that over the interval , the map corresponds to the gradient flow that connects , in particular this means the component of satisfies
We next construct our preguling, similar to the semi-infinte case our pregluing will depend on our asymptotic vectors .
Given fixed , let (we suppress the that should appear in the subscript to ease the notation) denote the suitably translated gradient trajectory, so that when restricted to satisfies
and
We observe that due to the form of in this region, we have . We preglue this gradient trajectory to the deformed curve at of . This value of over is identified with over . At the other end we consider translated in direction so that . Then we would like to preglue at to at , except there is an issue that since is in general different from , the curve has component , while has component roughly equal to . To remedy this we need to preglue with a different domain so that at we do our usual pregluing (as in the semi-infinite gradient trajectory case), but at we glue with a twist: recall is a cylindrical neighborhood on and is the usual coordinate on , then we construct the domain by identifying at . Then we can construct a preglued map
that depends on the asymptotic vectors .
Remark 8.1.
We first observe that here the domain depends non-trivially on the asymptotic vectors , in fact in the case where the domains for are stable, changing the pregluing in , i.e. “twisting”, or changing the length of the cylindrical neck by changing correspond to changing the complex structure of the domain curve.
We also observe here that if we change by size , then the length of cylindrical length changes by size . Similarly if we change by m in some appropriate sense the complex structure changes within an neighborhood. However when we change by , the length of the neck changes by . This is in some sense the main source of difficulty in studying this degeneration. Since they operate on different scales, and care must be taken to ensure all the vectors we encounter have the right sizes.
Remark 8.2.
Here because we only have one end the pregluing is rather simple, when there are multitple ends and/or when we talk about degeneration into cascades more care must be taken to into pregluing, which we defer to subsection 8.5.
8.2 Linear theory over
In this subsection we take a detour to study the linearization of over . In particular we find a suitable Sobolev space with suitable exponential weights so that for given , the said linearization denoted by is surjective with uniformly bounded right inverse as .
After fixing , we consider
Here is a piecewise linear function that is zero at and , has a peak at , and has slope . Explicitly it is given by
It looks like an inverted . The space is a weighted Sobolev space with exponential weight . As is with the case for semi-infinite ends these vector fields have exponential growth as , but we do not care about them because those regions do not make an appearance in our construction.
Remark 8.3.
Observe with our choice of , which we sometimes denote by for brevity, over the preglued curve , the pregluing takes place at and , and at these two values of where the pregluing takes place, the exponential weight profile of agrees with the exponential weight profile over .
Theorem 8.4.
as defined above is surjective of index 3. It has a uniformly bounded right inverse as .
Proof.
We can view as the gluing of two operators and . The operators are both defined over , except they use different exponential weights. We let , and We glue and together at to recover . By results in Section 5, are both surjective with uniformly bounded right inverse , hence as before we can construct approximate right inverse of via , hence is surjective with uniformly bounded right inverse as .
The index computation is done by conjugating to via multiplication by . There we observe by shape of there are 3 eigenvalues that cross as goes from to , hence by spectral flow this operator has index 3. ∎
We now proceed to describe the kernel of and a codimensional subspace of its domain so that is an isomorphism with uniformly bounded inverse as . This will be crucial for us when we try to solve equations over .
Consider the vector fields
They are asymptotically constant, but they live in because as the Sobolev norm is exponentially suppressed (written as is they still have very large norm, of order .) Also observe they live in the kernel of . Recall from the differential geometry section
This vector field also lives in the kernel of , and is linearly independent of , we modify it to have more palatable form. Consider
This still lives in the kernel of , and we see from Taylor expansion that the coefficient in front of is bounded above as . We defined the vector field to be where are constants (both of order 1, bounded above and away from 0) chosen so that . Thus the kernel of is spanned by . We construct a complement of this space. Consider the linear functionals defined by
We define the complement subspace of , which we write as , via
We next show:
Proposition 8.5.
The projection map
has uniformly bounded norm as . The map also commutes with .
Proof.
We first observe is defined by
We now estimate the norm of this operator. By the Sobolev embedding theorem
In view of the fact we have exponential weights, we have the upper bound
Hence to estimate the norm of it suffices to calculate
We only integrated from because the integral over takes the same form. And hence we see readily the operator norm of is uniformly bounded above independently of .
The fact that commutes with follows from the fact subtracts off elements that are in the kernel of .
Hence we conclude is a uniformly bounded inverse to restricted to . ∎
8.3 Deforming the pregluing
Recall that given a pair of asymptotic vectors over , which we denote by , we constructed a preglued map . Next given vector fields with exponential decay, , and , we use them to deform . Technically the space of deformations of also includes , but we suppress them from our notation because these deformations happen away from the region where the pregluing takes place. For considered over , we define the cut off functions
We would like to deform by , however there is one subtlety that when we constructed there was a twist at when we identified when we glued with . Since cuts off within the interior of , the only effect of this is that when we view the equation over instead of seeing , the term we see is . Aside from this point, as before we can add the vector field to , and apply the operator. Using the same “splitting up the equations” trick as we did for semi-infinite trajectories we get:
Proposition 8.6.
The deformed curve , where implicitly includes the variations of complex structure away from the gluing region, is -holomorphic iff the following 3 equations are satisfied
where is of the form
Here is of the same form as semi-infinite case (except at the end near we see effects of and near we see the effect of ). The equations take the form
where the scripted expressions taking the same form as they did in the semi-infinite case. Implicit in the above notation is also the variation of the domain complex structure , which we denote by when we need to make them explicit.
8.4 Solving the equations
8.4.1 Preamble
In this very lengthy subsection we show the system has a solution with nice properties. Since this is a long process we give a preamble:
-
•
We first show as before given fixed tuple of input data there exists a unique solution to .
-
•
Then we verify that when we vary the input, the solution behaves nicely (in the sense that its input into the equations into varies differentiably, as was the case for the gluing of semi-infinite gradient trajectories.)
-
•
Then we verify as we change the solution is well behaved. This is the crux of the matter, because when we vary what is actually happening is that we are drastically changing the pregluing by dramatically lengthening/shortening the length of the neck. We do this via the following process:
-
–
We make sense of what it means for to be well behaved when we vary .
-
–
We translate into the vector space by removing exponential weights.
-
–
We write the solution as a sum of two terms: an approximate solution to that behaves nicely when we vary and a correction to this approximate solution , we show is extremely small. Here are cut off functions (and definitely not Reeb orbits).
-
–
We consider the behaviour of as we vary . We consider two ways can vary called “lengthening/stretching” and “translation”. We show varies nicely with , hence the entire solution varies nicely with .
-
–
-
•
We finally show as a much easier step varies nicely with .
-
•
Using all of the above steps, we solve with the contraction mapping principle.
8.4.2 Solution to
Proposition 8.7.
For sufficiently small, for all sufficiently small, for fixed tuple with norm less than , there exists a unique solution to of size . Moreover the regularity of can be improved to with its norm similarly bounded above by .
Proof.
Let denote the uniformly bounded right inverse to . Consider . We observe this operator has uniformly bounded norm as . Further we claim this is an inverse to . To see this first oberseve is an isomorphism, as it has the same image as and has index 0. Hence it suffices to show is a right inverse for . This follows from
Hence we consider the map defined by
(For ease of notation we will write when both and appear in similar ways). It is apparent that a solution to is equivalent to a fixed point of . We show that a fixed point in an epsilon ball exists and is unique via the Banach contraction mapping principle. Since has norm , we have hence it sends to itself. That satisfies the contraction property follows from the fact is quadratic in , as well as the fact . Hence it follows from contraction mapping principle there exists unique solving in . We can use the equation itself to estimate the size of as before and get the size estimate of . The improvement to and its norm bound follows from elliptic regularity. ∎
8.4.3 How varies with
For fixed we consider the variation of as above with respect to . As we recall from the above the expression is a linear operator and has its sized measured via the operator norm. When we write below we really mean the multiplication map operating between Sobolev spaces. As in the case of semi-infinite gradient trajectories, we have:
Proposition 8.8.
.
Proof.
Consider the fixed point equation
We differentiate both sides w.r.t to get (see Remark 6.18 for this kind of operation)
Since we know is a polynomial expression of , we can bound (norm wise)
where in the above equation, the norm for and are operator norms, and and are norms.
Since have bounds of size , we can move the term to the left and get
which implies our conclusion. ∎
8.4.4 Variation of w.r.t.
In this subsubsection we study the variation of w.r.t. . When we change , we are considerably changing the pregluing. So we need to make sense of what kind of result that we want. We recall from previous section we already found a solution to in for every choice of , so our next order of business is to solve , and in order to do that we need to show as we vary , the part of that enters into equations varies nicely w.r.t. . We recall is an equation defined over . What is happening is as we vary , the maps are translated further/closer to each other, but since our equations are invariant in the symplectization direction, we can identify all those translates of and consider one set of equations as we vary . Thus we need to understand how behaves near the pregluing region. We make this a definition.
Definition 8.9.
Let , recall if we let denote coordinates near the cylindrical neighborhoods of punctures of , then we have identified and . Then for (resp. ), the vector field can be viewed as a vector field in (resp. ), as we noted in the pregluing section. We say is well behaved w.r.t. if over ,
and
where is viewed as a vector field over , and the norm is the weighted Sobolev norm in .
Remark 8.10.
Actually because no derivatives of appears in , only the norm is enough for our purposes.
The main theorem of this subsubsection is then:
Proposition 8.11.
is well behaved w.r.t. .
To do this we need to very carefully analyze the solutions to . It turns out it is not so convenient to analyze this equation with exponential weights, because the weights themselves depend on . So we first remove the exponential weights via conjugation. We use the following convention:
The exponential weights are removed and is rewritten using the following diagram:
| (15) |
Then the equation can be rewritten as
where . We use to denote the subspace in corresponding to . To better understand , let us focus our attention near . For this range of , the equation is exactly the same equation as we had solved for semi-infinite gradient trajectories since we do not see the effects of . Then by previous result we have a (uniquely constructed) solution for subject to exponential weight (which for our range of agrees with ). Defining
we see is a solution to for .
There is a slight subtlety in that near there is a twist in the coordinate as we constructed the pregluing domian, . By the construction in the semi-infinite gradient trajectory case, should depend on input variables , which we write as , but when we view it as a vector field over , using coordinates it should be written as . This won’t make a difference for us as we consider variations in the direction, and for the most part we will suppress the coordinate for brevity of notation. We will take up variations in the variables after considerations of .
We similarly construct . The point is:
Proposition 8.12.
is well behaved w.r.t. . i.e. the part of that enters into has derivative w.r.t. bounded above by .
Proof.
This follows from our results on when we proved this property for semi-infinite trajectories. ∎
The next step is to actually construct from approximate solutions . Consider the cut off functions defined by
Then we consider the approximate solution
We also observe by construction that . We plug this into , we observe by definition this produces zero for all except . In this interval the takes the form:
| (16) |
which equals
Observe so the error term takes the form
We can estimate the size of this term (say in norm), by elliptic regularity it is easily bounded by the norm of restricted to . (We actually see derivatives of in but this is fine, we can bound them by elliptic regularity). We know the norm of undergoes exponential decay as moves into this center region, so the size of the error term is bounded above by
where in the above equation denotes the full norm of over , or equivalently the norm of .
From the above we conclude the error term to the approximate solution is very small-exponentially suppressed in fact. We now perturb it by adding a small term to make it into a solution to . We state this in the form of a proposition:
Proposition 8.13.
We can choose so that . Further, the norm of , as measured in is bounded above by
The vector field also lives in , and its norm is similarly bounded above by
Remark 8.14.
We remark in the term , the term appears because we can only start the exponential decay after the effects of in disappear. (Technically we could have used but this will not make a difference).
Proof.
We plug into and solve for using the contraction mapping principle. We are now looking at an equation of the form:
We examine the term , recall generally takes the form:
Hence our expression can really be expanded as
The functions (the functions themselves, ignoring its inputs such as ) have uniformly bounded smooth derivatives and are bounded in the following way:
for small. Recalling our choice of cut off functions we always have , so this assumption is always satisfied. Recalling the elliptic regularity results on above we can actually bound the norm of and by . Then our equation for simplifies to
where was defined as the error term above. We now apply the contraction mapping principle to this equation, let denote the right inverse to (where corresponds to projection to as we have removed exponential weights). Consider the linear functional :
Let denote a ball of size , then it follows from the form of as well as the size estimate of that maps to itself. It follows similarly from above that is a contraction mapping, hence it follows from the contraction mapping principle that such is unique. It follows from uniqueness of in previous theorem that this from this contraction mapping is the we constructed earlier.
The norm estimate of follows directly from the norm estimate of . The improvement from to is as follows: we first realize lives in , the same is true for , hence also lives in . To get the actual norm estimates, we recall the fixed point equation
We first realize actually lives in by previous elliptic regularity results. We then realize restricts to a bounded operator from with image in by applying elliptic regularity to . Finally we observe the norm of is similarly bounded above by owing to the fact in the region where is supported, is smooth. Then to get the norm of we just measure the norm of both side of the fixed point equation and conclude. ∎
We now investigate how varies w.r.t. , because we already understand is well behaved w.r.t. . Instead of varying individually, we find it is more convenient to change basis and distinguish two kinds of variations. We introduce the new variable .
-
•
We call the transformation of this type: a stretch.
-
•
We can transformation of the type a translation.
We shall vary w.r.t. with these kind of transformations. In both cases we shall show is well behaved w.r.t. differentiating via .
8.4.5 Stretch
Observe in our region of interest we assumed , and that . The effect of stretch will be thought of as keeping the same gradient trajectory prescribed by but lengthen the interval to over with the peak of exponential weight profile still at . We translate and in opposite directions along symplectization coordinate. We then think of equation as taking place over the same gradient cylinder, but various terms like being translated as we stretch along . (There is some abuse in notation here, refers to the gradient flow length for original pair , and is how much we stretched).
The distance between and also changes but not in a linear fashion since but this is fine since none of our operators depend on .
We make the following important observation about . In our section dealing with semi-infinite trajectories when we moved the asymptotic vector ( here as in an element among the tuple ) we preglued to a different gradient trajectory. To be specific, let’s focus on . In the case of semi-infinite trajectories, after changing gradient trajectories, no matter the value of the pregluing always happened at . We denote the resulting function of by so that in this system preluing always happened at . Now in the stretch picture we are taking a different perspective, that when we deform by we are pregluing to a different segment of the same gradient trajectory , so and are related via translation, to be precise
Here we only consider variations in the directions and have suppressed the variable - there should be some identification of and . Variations in will be considered in a subsequent section. The feedback into is given precisely by for . And we understand how depends on , and by our previous sections its feedback into equation is well behaved w.r.t. . A similar relation also holds to , and .
Here we see the advantage of working in instead of since our norms are independent of . Observe similarly our definition of is independent of . The only dependence in comes from terms of the form (we include, where relevant, the subscript into our exponential weight profiles), which we will be able to describe explicitly. The formulate the following proposition:
Proposition 8.15.
In the case of a stretch,
where the norm of is measured w.r.t. . We are taking the derivative at , but it is obvious a similar formula holds for all small values of uniformly.
Proof.
We already know for every there is a (we suppress the dependence on ) satisfying
which we may rewrite as
We next proceed to differentiate both sides w.r.t. . We see that the result is an expression of the form
See Remark 6.18 for this kind of differentiation.
Step 1. We first differentiate w.r.t. . Recall over takes the form:
after we remove the exponential weights the corresponding operator takes the form:
For stretch is independent of , so the only dependence we see is on . We realize , but we realize that is independent of , so we conclude is independent of .
We next consider . We observe this is a map from . It is the inverse of , so we can instead differentiate the relation
where , to get
We already know is uniformly bounded w.r.t. , now recall that
Of course we know that has a “kink” where the absolute value bends (see definition equation for ) but we can smooth it. Noting that is independent of and is independent of , we conclude that
where we use the operator norm. (In this case it’s in fact zero).
Step 2 We next examine the term . There are two kinds of dependencies, one on how the function depends on , which we denote by , and second how its arguments and depend on . We first recall comes about from the expansion
The function only depends on the geometry, so the only dependence of the function on is given by :
Next we try to understand the dependence of through its dependence on terms like and . From previous remark by the semi-infinite trajectory case we understand , and . Similarly we have . Noting doesn’t depend on , we have
thus estimates:
Note taking the derivative of has cost us a derivative, hence the above norm can only be measured in . Thankfully this is enough for our purposes because brings back another derivative.
Now in this computation lives naturally in , by elliptic regularity lives in , so its derivative lives in . Hence the above inequality can at most hold in , which suffices for our purposes.
Next we need to consider the norm of , which we re-write as
We first make a remark about commutativity of derivatives, e.g. we have commuted . We know is in , hence we can commute the derivatives using the following version of Clairut’s theorem:
Proposition 8.16.
If is so that exists everywhere (here denotes the partial derivative of w.r.t the first variable), is continuous, then exists and is equal to .
Hence we can commute the derivative, measure the norm of , and bound it by the norm of , which is bounded above by . The norm of is bounded by the norm of , which is also bounded by by elliptic regularity.
But observe the expression involving is multiplied by or , so overall we have the estimate:
| (17) |
The last term coming from the dependence of on .
We remark in the above the term we have a product of functions, which remains in . This is where we justify our use of instead of . See Remark 3.2.
Step 3
The next term is . Note we have bound on , which is bounded by , so after we apply the norm of this term is overall bounded by
, and we move this term to the left hand of the equation.
Step 4 We finally estimate how the error term depends on , and here we shall use the exponential decay estimates proved in Section 7. Recall takes the form
The important feature of this expression is that it has support in , the term and its derivative over can be upper bounded by the terms:
where for both equations size refers to norm. Since this is supported over , bounds on the uniform norm imply bounds on Sobolev norms. Furthermore we know by elliptic regularity and its derivative are smooth over this region so it make sense to talk about norms. We first note
So the only terms we need to worry about are
over the interval . We recall by our convention so we have
By the constraint that , the terms on the right hand side have already decayed substantially, hence they are bounded by
which quickly decays to zero as . Finally we compute the derivative for . We can also break this down into
The exponential decay estimates in Corollary 7.7, as well as exponential decay in Proposition 7.4, say in the interval the above is also bounded by
Step 5 Combining all of the above estimates we see that
as claimed. ∎
Now we use the above to show is well behaved in the sense we originally described.
Proposition 8.17.
, and hence is well behaved with respect to when controls a stretch.
Proof.
Note what we feed into are vector fields with exponential weights, so we put back into we need to turn it back to via
but note that from above we have
And we know terms like behave nicely with respect to . So it suffices to understand how feeds back into . For simplicity we focus on . For fixed , and for , if we define , then from the perspective of , the vector field we see is for equipped weighted norm . We observe over the region , the weight function coming from , so when we calculate how the variation feeds back into we are really looking at
for with respect to the norm , which is equivalent to the expression:
with the unweighted norm over the interval . We observe
Here we have used elliptic regularity on to control its norm by its norm. The by the preceding proposition both of the above expressions are bounded above by , hence the proof. ∎
8.4.6 Translation
The case of translation is much easier than the case of stretch, as it bears many similarities with the case of semi-infinite trajectory. We don’t even need to remove exponential weights. The only salient difference is we now have to work in a subspace .
Let us first recall/set up some notation. Fix tuples , and they determine a pregluing between and . We use to denote the intermediate trajectory that connects between and in the pregluing. As before we define as our exponential weight profile, and we have the codimension 3 subspace . We fix coordinates over , with gluing happening at and . Let be a small number denoting the size of the translation, let , and let denote the gradient trajectory between the pregluing determined by . We equip vector fields over with Sobolev norms as previous described and it also has a subspace . On we choose coordinates and because we assumed the function is locally linear (after maybe a change of coordinates) we have that pregluing happens at and . Observe there is a parallel transport map using the flat metric
such that if is a vector based at , it is transported to over . Note the parallel transport map send to . And the solution to over can be identified with to an equation of the form
and the feedback term from into can be identified with the feedback of which corresponds to regions for and for . Then it suffices to calculate the norm of in .
Proposition 8.18.
.
Proof.
Observe that when measured in the operator norm because the coefficient matrices in this operator only depend on the background geometry. The same is true for . We recall is an isomorphism from
hence has an inverse whose operator norm is uniformly bounded over and as . The same is true for the derivative in of this inverse. To see this, we recall has a right inverse uniformly bounded in and , which we denote by . We also recall the inverse for is obtained by . Hence it suffices to show has uniformly bounded norm as changes in a translation.
Recall
as an operator we see that the terms involving are independent of , the vector field depends on but we see in norm that , so we see has uniformly bounded norm as varies, which in turn implies has uniformly bounded norm. We now investigate , which we can understand by differentiating the expression
w.r.t. , which yields
which implies as an operator has uniformly bounded norm. Next we recast the equation:
as a fixed point equation
using the exact same procedure as we did for for semi infinite gradient trajectories, we differentiate this equation in to show . Observe after parallel transport there was no translation of involved. ∎
Since in this case we worked directly with weighted norms we can directly conclude:
Corollary 8.19.
With respect to translations, the vector field is well behaved.
With this and the previous subsection, we conclude that is well behaved with respect to variations of . In the next part we examine how varies when we change .
8.4.7 Variations in ,
In this subsection we show that when we vary the parameters and the solution is well behaved.
Proposition 8.20.
The solution to is well behaved w.r.t. .
Proof.
Observe that changing can also have the effect of lengthening and shortening the gradient trajectory we need to glue between and , though the process is substantially less dramatic than when we changed . For instance when we change by size , the connecting gradient trajectory may lengthen/shrink by size , instead of . In particular we can redo all of the previous subsection. We separate the change to stretch and translation. We first observe in case of translation the equation actually stays invariant, because all of our background geometry is invariant in the direction. In the case of stretch, we remove the exponential weights, and repeat the above proof. The difference is that no factor of ever appears, so we don’t even need the exponential decay estimates. The rest follows as above. ∎
Proposition 8.21.
is well behaved as we vary .
Proof.
Recall for in the pregluing construction we are rotating the entire gradient trajectory along with it, so we can again use parallel transport in to turn it into a family of equations over the same space, which we denote by as before, and the resulting family of PDEs over by . We use to denote the solution to . By assumption, the almost complex structure , when restricted to the surface of the Morse-Bott torus, is invariant, however, the local geometry is not necessarily invariant. Therefore, the linearized operator as well as nonlinear term picks up a dependence, so the equation solved by has a linear operator and a nonlinear term with dependence. Also observe is invariant under changing , so we denote it by the same letter when viewed as subspace in .
We now recall what happens to the pregluing near the end, the domain Riemann surface is constructed at with the identification . So we see this effect in the equation via the dependence of on , in particular the term in should be instead . Hence after parallel transport we see is the unique solution to the equation in :
Again, following the same procedure as we did for semi-infinite gradient trajectories we recast this as a fixed point equation
and differentiate both sides with respect to , observing that as in Remark 6.12. However, it is important to note that taking an derivative of the above equation will produce a derivative of , which will produce a function in (we neglect any mention of weights for now). But since we are not taking any further derivatives of , this is fine as will send this to , then the same argument as before shows that
as desired. ∎
8.4.8 Solution of
In this subsection we use the results from previous section to finally solve and hence conclude gluing exists. Recall deformations of are given by the elements , and the linearized Cauchy Riemann operator
is surjective with right inverse . Then are equations of the form
where is a quadratic expression in each of its variables, implicit in are quadratic terms depending on responsible for variation of domain complex structure away from the punctures. And implicit in term are error terms uniformly bounded by in the interior of responsible for the fact that are -holomorphic, instead of -holomorphic.
Theorem 8.22.
The system of equations has a solution, and hence 2 level cascades with one intermediate end can be glued. Furthermore, for specific choices of , which are right inverse to , there is a unique solution in the image of .
Proof.
We consider the system of as a map from
We solve this via a fixed point theorem by finding a fixed point to the map
We show it maps the ball to itself. This follows from the size estimates we had of relative to , as well as the fact is quadratic, and the size of the terms that appear in are very small. We next argue this map has the contraction property as we vary ; this follows directly from the previous subsection in which we showed is well behaved with respect to these input variables, plus the fact is quadratic (see remark 6.12).The sizes of terms that appear in are also uniformly small, as we derived in the pregluing section. Hence the contraction mapping principle shows there is a unique solution in the image of . ∎
Remark 8.23.
Relation to obstruction bundle gluing. We remark we could have proved a gluing exists via obstruction bundle gluing methods in [HT07],[HT09]. This is more similar to how the gluing of 1 level cascades was constructed in [CGH]. We explain this in the simplified setting as above, and the general case of multiple level cascade can be done analogously. Recall is index 1 (i.e. is rigid), we let be a 1 dimensional vector space in spanned by image of asymptotically constant vector field under , and let denote a fixed complement given by the image of under . The fact is closed follows from the fact our operators are Fredholm, and it form a complement for index reasons (as long as neither is a trivial cylinder).
Then we form the (trivial) obstruction bundle with base and fiber . Then instead of solving on the nose we introduce projections that project to . Then for fixed input data in an epsilon ball, we solve the equation for
Its (unique) solution , which depends on all input data , will have norm uniformly bounded by (the is uniform as we vary ). Then the solution to the system of equations is equivalent to the solution of the following system of equations
We observe for fixed the equations can always be solved via contraction mapping principle, essentially because the nonlinear term under the projection always lands in the image of by construction, and we have estimates . The other two equations in the language of [HT09] define an obstruction section to the obstruction bundle, as
and the vanishing of corresponds to gluing. In the above expression we think of as real numbers (because we have projected to the one dimensional spaces ). But we observe by the size estimates of , the size of the nonlinear term under is uniformly bounded above by . However the linear term varies freely from to . The nonlinear term is clearly continuous with respect to variations in . Hence from topological considerations the obstruction section must have at least one zero, hence we have at least one gluing.
The difficulty with the above approach, is of course there is at least one gluing, but it is unclear how many there are in total. One could improve the above conclusion by trying to argue that is not only close to the but also close, and this would imply the zero is unique. In fact what we proved about “ being well behaved w.r.t. ” is tantamount to showing is close to . This required we do very careful exponential decay estimates as well as another contraction mapping principle. That we previously proved gluing via contraction mapping and here phrased it here as obstruction bundle gluing is purely a matter of repackaging.
Remark 8.24.
Another possible approach to obstruction bundle gluing might be to show for generic choice of we can arrange to have the zeros of the obstruction section be transverse to the zero section. This will show there is only one gluing up to sign. This is more in line with the strategy taken in [HT09]. However, it’s unclear whether we can choose generic enough since here we have a family of degenerating as as opposed to some fixed generic .
Remark 8.25.
We shall later prove surjectivity of gluing. The appendix of [CGH] used a different strategy for surjectivity, hence did not need to prove the solution obtained via obstruction bundle gluing is unique. Conceivably the methods there could also be applied here, but the construction would be difficult for two reasons: one they used stable Hamiltonian structures as opposed to contact structures, therefore their equation is nicer than ours. Two it seems their methods would be difficult to carry out in multiple level cascades where the dimensions of moduli spaces that appear could be very high. Instead in what follows we use an approach in Section 7 of [HT09].
8.5 Gluing multiple level cascades
In this subsection we generalize gluing to multiple cascade levels. Given what we have proved above, this is mostly a matter of linear algebra. However there are still subtle details we need to take care of, we first take care of the simple case where we are still gluing together a 2-level cascades, except now with multiple ends meeting in the middle. This contains all the important features required for the gluing. Then we will simply generalize this situation to level cascades.
8.5.1 2-level cascade meeting at multiple ends
We consider a 2-level cascade built out of two -holomorphic curves and meeting along free ends along an intermediate Morse-Bott torus. It does not matter how many intermediate Morse-Bott tori are there, so for simplicity we assume there is only one. We assume all ends of and landing on this Morse-Bott torus avoid critical points of , and we have chosen coordinates so that the Morse function looks like . We assume this cascade is rigid, and and are separated by gradient flow of for time . We also assume the coordinates of the positive asymptotic Reeb orbits of are labelled by .
In this example, for simplicity of exposition, we only focus on gluing finite gradient cylinders, and ignore gluing for semi-infinite trajectories. Hence we assume no positive end of nor negative end of lands on the Morse-Bott torus that appear in the intermediate cascade level, and we only perturb the contact form to be nondegenerate in a neighborhood of this torus.
The fact the cascade is rigid and transverse implies the following operator is surjective
denotes asymptotic vectors associated to ends away from glued ends. denotes asymptotic vector fields at glued ends except they only include components. is a dimensional vector space that consists of asymptotic vectors that satisfy relations , where is a positive real number that varies freely. is our shorthand for the linearization of the Cauchy Riemann operator, which implicitly also depends on the complex structure of the domain.
We next do a much more careful pregluing. The main difficulty is for fixed , suppose we start at , and connect to a lift of a gradient trajectory that flows for distance in the direction, if we used coordinates on this gradient flow cylinder, the coordinate has range which is independent of . But the distance (i.e. distance in the symplectization direction) traveled by this gradient trajectory for the same from to varies depending on , fundamentally this is because the coordinate satisfies the ODE
which depends on the value of . Hence in the pregluing, instead of using the vector field where , there would be some nonlinear relations between the asymptotic vectors and .
Fix cylindrical coordinates around each of the punctures of that hits the intermediate cascade level (i.e. the Morse Bott torus) and likewise for punctures of . Near each of the punctures the maps takes the form
We use for to denote the relevant component of a map, i.e. denotes the component of at its th end. We use the following notation to denote the various evaluation maps
We observe the deformation with respect to the asymptotically constant vector field is constructed the same way as before, so we focus our attention on the vector spaces consisting of the tuples .
Let . Consider the submanifold in defined as follows
where is defined as follows: let denote the gradient trajectory connecting the ends between and . We endow it with the following specification: its coordinate at starts at , and its coordinate at starts at . It follows the gradient flow for length . We then translate in the direction so that . Further we have .
Then for , we define to be the amount of displacement in the direction required so that a gradient flow of -length flows from to at the th end between and . By -length we mean for a finite segment of gradient cylinder, after having chosen coordinates on the gradient cylinder, the amount by which needs to change to go from one end of the gradient cylinder to the other end. We see immediately that
and
From this it follows immediately that is a submanifold. And that for small enough the operator
is surjective with uniformly bounded right inverse. By we mean the subspace of that only includes the components of the asymptotic vectors. Then it follows immediately that any element in gives rise to a pregluing, since the and components of and the intermediate gradient trajectories match.
Remark 8.26.
Our operator
has a two dimensional “kernel”. The kernel is in quotations because is a submanifold instead of a vector subspace, but as we have seen it is exceedingly close to a linear subspace, so we gloss over this point. The two dimensional “kernel” consists of two kinds of elements, they both come from the fact are -holomorphic curves in symplectizations and hence there is a translation symmetry. The first kind of kernel element comes from translating and by the same amount in the sympletization direction. This is an genuine kernel element of . The other kernel element is translation and in opposite directions, so that they become closer/farther away from each other. This is no longer in the kernel because of the nonlinearities of , but as we see the corrections are small. For the purposes of this section choosing a right inverse for doesn’t matter, since we only need to show a gluing exists. Later when we need to prove surjectivity of gluing we will choose specific right inverses for , which amounts to saying we consider vector fields where there are approximately no translations over the curves and .
We can now state the gluing construction.
Theorem 8.27.
2-level cascades of the form above can be glued. The gluing is unique up to choosing a right inverse for when we restrict the allowed asymptotic vectors corresponding to ends that meet on the intermediate cascade level on the Morse-Bott torus to as above.
Proof.
Given a tuple of elements , as well as as twist parameters, we can define a preglued curve by pregluing gradient trajectories between and a translated . Then, just as how we proved gluing for two curves with a single end meeting at intermediate cascade level, we deform the pregluing with appropriate vector fields, i.e. starting with vector fields and . We also implicitly deform the domain complex structures of using ; we also deform using asymptotic vectors at other ends in , they live in and we denote them by ; since they are not super relevant to our construction we suppress them from our notation. We construct the perturbation
And as before, the deformation is holormophic iff the system of equations can be solved:
Then we follow the same strategy of proof as before, given the tuples of input along we can define subspaces such that there exists unique solution to , . It follows immediately from previous theorems that has norm bounded above by and is nicely behaved with respect to variations of all input data . We then view the system as looking for a zero of a map
It follows from our previous calculations of how looks like in these coordinates, as well as the fact the operator restricted to being surjective that can be solved simultaneously for via the contraction mapping principle. Such a solution is unique provided we fix a right inverse for . ∎
We now turn to gluing -level cascades. It will follow the same strategy as above as long as we introduce some new notations so we will be brief. The main purpose of the ensuing proof is to introduce some useful notations.
Theorem 8.28.
-level tranverse and rigid cascades can be glued, and the solutions are unique up to choosing a right inverse, as specified in the proof.
Proof.
Let be an level cascade that is transverse and rigid. For each we let denote the vector space and the vector space and let denote the submanifold consisting of asymptotic vectors in directions corresponding to free ends that meet each other between and , analogous to for the 2 level case, so that pregluing makes sense. Then the fact that the cascade exists, is transversely cut out, and of Fredholm index 0 implies the operator
is surjective with uniformly bounded right inverse. Hence for each element in we preglue together and by inserting a collection of gradient trajectories in the middle. In case and have components consisting of trivial cylinders that begin and end on critical points, we recall such chains of trivial cylinders will eventually meet a non-trivial holomorphic curve with fixed end at the critical point. We replace such chains of trivial cylinders with a single fixed trivial cylinder as in the case of gluing fixed trivial cylinders in the case of semi-infinite trajectories. We add marked points to unstable components in cascade levels to make them stable, see Convention 3.3. For the positive ends of and negative ends of , if it a free end we glue in a semi-infinite gradient trajectory, and if it is a fixed end we glue in a trivial cylinder. This constructs for us a preglued curve . Then we deform this preglued curve using vector fields over and over the gradient flow lines we preglued. We require that lives in the vector space , which is defined analogously to in the case of 2 level cascades, if corresponds to a finite gradient flow trajectory, and no such requirement is imposed if is over a semi-infinite gradient trajectory. As before the entire preglued curve can be deformed to be holomorphic iff the system of equations
can be solved. We use bold to denote a system of equations. corresponds to equations over , and corresponds to equations over gradient flow trajectories, which implicitly includes semi-infinite trajectories. As before for fixed epsilon ball in , the equations have unique solutions in that are well behaved w.r.t. input. Then the equations have unique solutions follow from the fact is surjective with uniformly bounded inverse and the contraction mapping principle. The solution is unique to a choice of right inverse for the operator . ∎
Remark 8.29.
We note here by elliptic regularity all of our solutions are smooth, with their higher norms bounded by their norm.
Remark 8.30.
We note by the additivity of the relative first Chern class and the Euler characteristic, the resulting glued curve has Fredholm index one.
9 Behaviour of holomorphic curve near Morse-Bott tori
In this section we prove a series of results concerning how -holomorphic curves behave near Morse-Bott tori. This is part of the analysis that is needed to prove the degeneration result from -holmoprhic curves to cascades in Bourgeois’ thesis [Bou02]. We redo this part of the analysis, not only to prove the degeneration result in our case in the Appendix, but we will also need them to later show that the gluing we construct is surjective. The analysis here is very similar to the analysis performed in the Appendix of Bourgeois and Oancea’s paper [BO09], the only major difference is we are working in symplectizations where they work near a Hamiltonian orbit. We start with a series of analytical lemmas.
9.1 Semi-infinte ends
Recall the neighborhood of Morse-Bott torus we have coordinates , with chosen so that at the surface of the Morse-Bott torus . The linearized Cauchy Riemann operator along trivial cylinders that land on this Morse-Bott torus takes the form , where
is a symmetric matrix that only depends on and . The kernel of is spanned by . Let denote the projection to its kernel, and let denote the projection .
Theorem 9.1.
Let be a -holomorphic map that converges to a simply covered Reeb orbit corresponding to a critical point of as . We also assume for , the map stays away from all other Reeb orbits corresponding to other critical points of , uniformly as . Assume for we have
where , and is sufficiently small (but independent of ). We also assume all other derivatives are uniformly bounded above by . There is some independent of and only depending on the local geometry of Morse-Bott tori so that
where inheriting previous notation, we use to denote a gradient trajectory of , the definition of is given in the proof. Further, inequalities of the above form continue to hold after we differentiate both sides with respect to , in other words the inequalities hold in the norm.
Proof.
In the course of this proof we first perform some important calculations which we will later reuse for decay estimates over finite gradient trajectories.
Step 0 In our coordinates system the equation looks like (we will drop the subscript from )
Following the Appendix of [BO09], let’s change variables
where and . Then the equation changes to
We simplify this as
We clarify is the Morse-Bott complex structure evaluated at , and is the standard complex structure, which coincides with the Morse-Bott almost complex structure on the surface of the Morse-Bott torus. is the difference between the Morse-Bott complex structure and the perturbed almost complex structure, and as a matrix is has norm bounded above by (its derivatives are also bounded above by) the expression . The term is a 4 by 4 matrix coming from the linearization of on the surface of the Morse-Bott torus, and hence it only depends on .
In the above expansion, we have the estimates
and
We implicitly assume we have taken absolute values of both sides. Similar expressions hold for their derivatives (lowering orders in as we differentiate).
Next consider the term
where is some matrix whose norm is bounded above by . We further observe doesn’t depend on since at the surface of Morse-Bott torus it is rotationally symmetric.
We further examine
where we used the fact restricted to the surface of the Morse-Bott torus is invariant in the direction.
Now we recall our assumptions about the form of . In particular we assume with (this can always be achieved via a reparametrization of the neighborhood around the puncture), so if we plug that in to the above expression it is equal to:
Having performed these computations we return to the overall equation of the form
For later elliptic regularity purposes it will be useful to write the above in the following form:
Step 1 As before consider the operator
Note this operator as it appears in the above equation depends on the coordinates of , but we observe it remains true there exists a so that for all functions ,
As a matter of bookkeeping we observe our vector field is smooth, hence has a well defined restriction to for any value of .
We define
as before for our decay estimates we compute
We observe both and commute with .
Step 2 Examining the first term above
Let’s dissect these terms one by one. First since commutes with we have
for some independent of .
We next consider
which warrants special treatment. For fixed we denote by the average value of over .
Then we can write terms like
and for we have . Therefore we observe and hence we have the estimate
The same also applies to other functions built out of , hence we have
Here we also note that the equation satisfied by is of the form
| (18) |
where is just a function of whose derivatives are uniformly bounded.
Aside from the two terms we calculated above, applying to does not have a major impact on other terms. To consider the rest of the terms appearing in let’s estimate their norms (since later we can just use the triangle inequality to either estimate their cross term with themselves or with terms involving ).
The norms of the terms below after we apply
are respectively bounded by the norms
The key observation is as part of our assumption, as well as the fact all occurrences of are upper bounded by . Another key observation is , so every time we see we replace it by hence the appearance of the many in the above expression.
Step 3 We look at the next term
Note for terms we think of being small, we are not careful about their signs. We introduce some more convenient notation. We write the -holomorphic curve equation as
Then we have
To obtain the first term in the above expression we used the fact that
is a 4 by 4 matrix whose only nonzero entry is the diagonal entry corresponding to , so
The only term we don’t know how to control is the last one , the previous ones follow from computation in previous steps. Let’s recall the terms in :
We need to compute the norm of these terms after we take their derivative. We first only consider the derivatives on , by assumption that , when we take the derivatives of , they are still operators of the same form. For example is of the form , and the norm of each term can be bounded above by . The same can be said about , , so by abuse of notation we use the same symbols. Then techniques from previous steps immediately show the norm of these terms are upper bounded by
We next consider the derivative of . We first observe commutes with so we are evaluating . Recalling the previous form of this vector field, the components are essentially built out of , so we need to take its derivative and projection via . Using the previous trick of introducing
Observe because this term doesn’t depend on . Hence pointwise
Hence:
and we have seen above how to bound the norm of . Next:
We assumed this term can be upper bounded by
Finally we turn our attention to terms of the form
which appear once the derivative hits . Here denotes a matrix whose norm is uniformly upper bounded by the real number . We can insert a factor of after the derivative and get
The terms in the last line are already well understood by previous computations. In particular was worked out in the previous step and was worked out in this step. Hence putting all of these terms together we have
hence from previous lemma we have , hence the norm of undergoes exponential decay. That this extends to pointwise norm follows from elliptic regularity, using equation 18.
Step 4 In this step we look at what equation satisfies. Let’s recall the original equation
We split and plug into the above equation to get the pointwise bound:
where we used the previous bound on the norm of . We remind ourselves might change from previous parts because of various changes in norm. We can replace with because is bounded by , which decays exponentially, so we can take the error term to the right hand side to get
Observe that the function only depends on , and the above are pointwise inequalities. Differentiability of comes from bootstrapping and observing the differentiability of in the variable. The decay estimates of the higher order derivatives follow as well. We let , where denote the various components of . The equations in these coordinates are
We now solve the above inequalities. For brevity we denote by the expression on the right hand side for , and the only property we will need about is that it is asymptotically of the form . The inequality
integrates to
Next , we pick a coordinate neighborhood so that . We can do this because we know eventually limits to a critical point of as and stays away from all other critical points of , the choice of corresponds to whether we are in a neighborhood of maximum or minimum of . Then this is an equation of the form
Then we have
We can write
where satisfies the equation
Since we known decays quickly when , the function must have a limit as , call this limit . Then we have
hence
We recognize as the gradient flow we identified earlier and is considered the error term, and by the form of the error term has the decay we needed.
We note in the case the gradient flow converges to zero, and this corresponds to “free” ends converging to the maximum of on positive punctures. In the case where , the gradient flow segment , if we have , will actually flow away from the critical point , so it will eventually leave the neighborhood where the expression is valid, and instead flow to the other critical point/maximum of , for which we can use the above analysis directly. The exception is if , and this end will converge to the , or the minimum of . This corresponds to the case of a “fixed” end converging to the minimum of . Implicit in the above discussion is the assumption that stays away from all except one critical point of uniformly as . This, in the language of our equations, means (this constant implicitly depends on ), is either bounded away from zero for all small enough, or is identically zero for small enough. These correspond respectively to the above two cases. The case where and as corresponds to the -holomorphic curves breaking into a cascade of height , and is outside the scope of our discussion.
Finally we consider the equation
Now by the above estimate on , there is a gradient trajectory whose component, is approximated by , in the sense that
Then for small enough , we have the estimate
hence we can write
where we absorbed the error term into since they are of the same form. Then we integrate both sides to get:
Using the same trick as before we write , recognizing is the component of a lift of a gradient trajectory, we arrive at the desired bound. ∎
Remark 9.2.
In the above proof and what follows we assume that stays uniformly away from all but one critical point of . The estimates for is largely unaffected by this assumption, the main reason we use this is so that we could have nice exponential decay estimates for (this is where we used local form of ). In general (and in manifolds where the critical Morse-Bott manifolds are higher dimensional) we could have degenerate into a broken trajectory of along the critical set, and the estimate there is more involved. Fortunately our transverse rigid constraint means our assumption about being away from except at most one critical point of will be sufficient for our purposes.
9.2 Finite gradient segments
We now extend these exponential decay estimates to finite gradient trajectories.
Theorem 9.3.
Consider an interval and a -holomorphic curve so that when restricted to the map is close to the Morse-Bott torus, i.e. in a neighborhood of the Morse-Bott torus has coordinates and the functions satisfy
for some depending only on the local geometry and independent of , then
for some only depending on the local geometry.
If is uniformly bounded away from all critical points of except maybe one, there is a lift of a gradient trajectory, which we denote by , so that
Proof.
The proof will follow the general thread of the semi-infinite case. We recall our convention may change from line to line, but not in a fashion that depends on . Recall we defined the function
then we have the inequality
We define the auxiliary function
then we have the inequality
Then cannot have positive maximum, and by construction at . Hence globally for .
With elliptic regularity as before, we obtain the pointwise bound
which by elliptic regularity can be improved to bound the derivatives of . Using the inequalities
We then obtain inequalities:
where we have of course changed the definition of . We also have
where for brevity we have defined
We try to integrate this inequality as before: . There are various components to this equation, which we examine one by one. For the easiest case we have:
Integrating both sides we get
Identifying as a constant, we obtain the required estimate. We next examine:
For segments of gradient flow uniformly away from all critical points of , then we can choose our coordinates so that locally . Then the above equation takes the form:
Using the exact same techniques as above, we conclude
Identifying as the component of a lift of the gradient flow, the conclude the required estimate.
If is uniformly bounded away from all critical points of except one, then we can only choose coordinates so that (the case for is similar), then the above equation takes the form
Recyling notation from the previous proof we get
where Using integration factors as before we obtain
Integrating both sides, from to
where . Then
Here we need be a bit careful about this integral, by our assumptions on it is upper bounded by:
WLOG we assume and , then we have the inequalities:
Then the integral
which is exactly our estimate. The same works for .
Finally we consider . As before we replace with , which introduces an error of the same form as due to our above estimate, so we simply absorb it into on the right hand side, we then integrate both sides to get
from this we conclude the proof. ∎
10 Surjectivity of gluing
In previous sections we proved every transverse rigid cascade glues to a -holomorphic curve of Fredholm index 1. In this section we show this gluing is unique, i.e. if a -holomorphic curve is sufficiently close to the cascade, then it must have come from our gluing construction. The main strategy is to consider a degeneration of a -holomorphic curve into a cascade . Using the compactness results stated in Section 11.2 of [Bou+03] (See also Chapter 4 of [Bou02]) and proved in our appendix, we know the convergence is , using our local estimates we show corresponds to a solution of our tuple of equations
Here we use to denote the system of equations over the -holomorphic curves in the cascade, and denotes the system of equations over each gradient trajectory (finite or semi-infinte) that appear in the cascade. Furthermore, we show we can arrange that vector fields among the equations in that correspond to finite gradient trajectories all live in , the codimension 3 subspace we fixed for each finite gradient trajectory (we abuse notation slightly, there is a different for each different finite gradient trajectory). We showed in the gluing section such vector fields in are unique. We also make a choice of right inverse for for the system , and show we can arrange so that the vector field producing lands in the image of said right inverse for . Therefore from the uniqueness of our gluing construction there is a 1-1 correspondence between -holomorphic curves and cascades.
The outline of this section is as follows. We will first focus on the simplest possible case: a two level cascade meeting along a single Reeb orbit in the intermediate cascade level. Even in this simplified setting there are several stages to our construction: we first use the previous decay estimates to show that is in an neighborhood of a preglued curve constructed from the cascade . Then we adjust the pregluing using the asymptotic vectors so that the vector field over the finite gradient trajectory lives in , and the part of the vector field living over lives in the preimage of our specified right inverse, while maintaining the fact the vector field still lives in the ball. Finally we extend the vector fields over all of and so that they become solutions to and , using tools from Section 7 of [HT09]. We also develop some properties of linear operators for this purpose.
Then after the 2-level cascades case has been thoroughly analyzed and proper tools developed, we introduce some more elaborate notation to set up the more general -level cascade case.
10.1 Notation and setup, for 2-level cascades
We note here that we are not proving the SFT compactness statement, we are simply using it. For ease of exposition, we first describe the case with degenerating into a 2 level cascade consisting of and and such that they only have 1 intermediate end meeting in the cascade level. We let , and denote the Reeb orbits on the Morse-Bott torus. We fix domains and for and . We fix cylindrical neighborhoods near punctures of , and let denote coordinates near the puncture that meet along the intermediate Morse-Bott torus. We let also let denote the cylindrical coordinates on that are on punctures away from the Morse-Bott torus that appear in the intermediate cascade level. Recall a neighborhood of the maps is given by
We let denote the domain for . Then by the analog of SFT compactness, for each we can break down the domain into 3 regions,
where we think of as regions that converge to , and the thin region biholomorphic to a very long cylinder that converges to the finite (yet very long) gradient trajectory connecting and . To be more precise, we can translate globally so that over the map converges in to , and there exists a sequence of translations, we denote by , so that after we translate by , which we denote by , the map when restricted to converges in to . Technically the convergences to and are over compact subsets of , near the other punctures there are additional convergences to semi-infinite gradient trajectory. Here we only concern ourselves with convergences near , and worry about semi-infinite gradient trajectories in a later section.
10.2 Finding appropriate vector fields
We first consider the degeneration in the intermediate cascade level. We will later consider degeneration to the configuration of a semi-infinite gradient trajectory.
10.2.1 Finding a global vector field
Let , the specific size of will be specified in the course of the construction. We fix a large real number , then we consider the region as subsets of . We denote this compact subset of the domain by . We take large enough so that for the maps are in a small enough neighborhood of , that up to derivatives, we can think of as exponentially decaying to trivial cylinders, with exponential decay bounded by .
This choice of also determines a decomposition of the domain of , to wit
Then the convergence statement in implies there are vector fields of norm and variation of complex structure of size so that
and
We shall for now suppress the variation of complex structure and simply write . When later we want to include it in the notation we shall write . We also recall that our metric is flat around Morse-Bott tori, so for small enough , we have near Morse-Bott tori.
We here simply note the norm of is then bounded above by . For fixed , as , by convergence we can take to make this expression as small as we please. We also observe for fixed and small enough the deformations are within an ball of . We next consider the behaviour of when restricted to the neck region . We first informally write as the cylinder . We start with the following lemma:
Lemma 10.1.
By our assumption as (which would take with it in order to satisfy our previous assumptions) we have converges in to trivial cylinders. This is also true uniformly, i.e. for given , there is a large enough so that for every small enough values of , is within (in the norm) of a trivial cylinder of the form for all values of so that .
Proof.
Step 1 We claim for large enough for all of . Suppose not, then we can find a sequence where , by Gromov compactness a holomorphic plane bubbles off. But a holomorphic plane must have energy bounded below, by the Morse-Bott assumption. However as the energy of goes to zero, which in particular is less than the minimum energy required to have a holomorphic plane, this is a contradiction.
Step 2 We argue by contradiction, Suppose for all there exists an interval so that the distance of and any trivial cylinder is . However we observe as the energy of goes to zero uniformly in , then by Azerla-Ascoli this converges to a holomorphic curve of zero area, which must be a segment of a trivial cylinder. Hence we have a contradiction. ∎
Then the previous convergence estimate implies the following:
Proposition 10.2.
We take small enough so that previous convergence estimates near Morse-Bott tori apply. Then there is a large enough , and small enough (which depends on ), so that if we choose small enough (which depends on the choice of and but can always be achieved), there is a gradient trajectory defined over the cylinder so that there is a vector field over so that
and the norm of satisfies
and in particular, if we choose small enough, by convergence
We estimate the norm of for later use. With some foresight we realize we need to use a weighted norm for , where
Then we measure the norm of with respect to , but by the previous proposition the norm of undergoes exponential decay as it enters the interior of . Hence we have
We now come to the main result of this subsection. We combine and into a vector field over some preglued curve built from , the curve and some asymptotic vector fields. We first recall that
Now we have the norm of and are both bounded above by , then we can deform by asymptotic vectors all of which are of size so that
There are naturally several possible choices possible for . In anticipation of our later constructions, we make the following important specification.
Recall for , for the map converges to a parametrized trivial cylinder
whose image is of course the trivial cylinder . The key property is that decays exponentially to :
We also recall properties of , which is the finite gradient trajectory converges to. For small enough , the gradient flow is extremely slow, so for , there is another trivial parametrized cylinder
so that for
which goes to zero as . By the comparison result above there are vectors so that:
Then we choose this particular choice of . There is some free choice of up to size , which for our purpose is extremely small. We will always make a choice so that the end of and of can be preglued together, in the sense we preglued them together in Section 8. (Also see below).
Similarly we recall that
By the same reasoning there is a parametrized trivial cylinder that decays exponentially to:
And we can find parametrized trivial cylinder so that for we have
Hence by comparison we choose asymptotic vectors of size bounded above by over so that
The trivial cylinders satisfy the relation
Observe since as a parametrized cylinder does not rotate in the direction, here we have . We note this here because in our gluing construction earlier where we identified . We shall see where this is used in a later section.
Then we construct the preglued domain by gluing together
by we mean the domain of with removed. In other words . (We ignore the ends of glued to semi-infinite trajectories for now). A similar expression holds for . By we mean with complex structure deformed by and the cylindrical neck twisted/stretched/translated by asymptotic vector fields . We specify the gluing as follows. We glue together
Using the same pregluing interpolation as we did in our pregluing construction. At end we are making the identification
and this determines our preglued domain, . In constructing this preglued domain, we have identified:
Since , here the is identified with without any twist. It carries a natural preglued map into by defining it to be on and on , and interpolated in the pregluing region the same way we preglued in Section 8. We call the preglued map . Then we can form the interpolation of the vector fields and into a vector field we call so that
We should at this stage measure the size of . We need to measure it with exponential weights. The weight in question takes the form over and of the form over .
Proposition 10.3.
The norm of measured over with weights as specified above is bounded above by
For small enough we can make this bound be as small as we please. For convenience we use another letter , informally thought of as , and say given , we can take small enough so that norm of is bounded above by . With some foresight, we will need to make it a bit smaller than , we can take small enough so that the vector field is bounded above by .
Proof.
The norm of measured over is upper bounded by as we discussed earlier.
Next consider the segment of over for . Recall we glued at the end points of this interval, hence by previous estimates the norm of it is bounded above by . Next we address the remaining region. WLOG we focus on for . In this region, the distance between and is bounded above (even when integrated against weights) by . The distance between and the trivial cylinder is bounded above by after integrating with the exponential weights. The distance between and in pointwise norm is bounded above by
so when we integrate this pointwise difference over with weight , we have the upper bound
and hence our overall bound on is as claimed in the proposition.
To explain how we make the vector field smaller than , we first choose fixed large enough so that , then by choosing small enough we can make much less than , and we recall as , . Finally as by the definition of . ∎
10.2.2 Separating global vector field into components
After we have obtained the preglued map and vector field , there are a few more steps to complete our construction. They are:
-
a.
Truncate the vector field into
where
-
b.
Adjust the asymptotic vectors in the pregluing so that the vector fields live in images of and respectively, where the definition of these conditions will be specified below.
-
c.
Show and can be extended to (unique) solutions of the equations and , subject to our choice of right inverse in the previous step.
In this subsection we address the first two bullet points, and the third bullet point will conclude the surjectivity of gluing, which we will take up after a technical detour.
To address the first bullet point we introduce the cut off functions over . We define
The obvious inference is that if we imagine we constructed from a prelguing construction by deforming with and gluing to it a finite gradient segment, the cut off functions listed above should correspond to the cut off functions we used for our gluing construction. In fact this is exactly the case, ought to be identified with . The only difference is a change in notation where our coordinates are shifted by a factor of .
Then to address the first bullet point, we take some care to specify what we mean in our definition of in anticipation of our upcoming proof of surjectivity of gluing. In particular we must define so that they satisfy the following properties:
-
•
-
•
Their norms satisfy
as measured in with weighted norm (we ignore the other ends of for now). As well as the fact
as measured in .
-
•
The vector fields have support as follows. Using coordinates over for . The vector field for , and for and . (These supports are not too significant as we will find some other way to extend them later).
We observe such extensions are always possible. We note the previous theorem on the norm of the global vector field implies analogous statements on the individual vector fields . The bullet point about support follows from choice of cut off functions .
To address the second bullet point, we specify what we mean by the “right spaces”. Assume are nontrivial with stable domains, recall for and (or rather a suitable translate of in the symplectization direction) with domain the space of deformations is given by
The operators with domain are defined as the linearization of along with variations of complex structure of . By assumption have index with kernel , i.e. global translation in the direction. Recall to define the equations we needed to fix a right inverse to . We choose as follows, consider the codimension 1 subspace defined by
| (19) |
where is the compact subset of with all cylindrical neighborhood around punctures removed. Then restricted to is an isomorphism with inverse , and we take this to be the right inverse used in the contraction mapping principle we use to solve . In the case where the domain is not stable, we note the following convention.
Convention 10.4.
For definiteness say the domain of is either a plane or a cylinder, then the act of placing marked points in the domain presents us a subspace so that the restriction of to is an isomorphism: we simply take to be vector fields that preserve the condition that marked points remain on the auxiliary surfaces we chose in Convention 3.3. If has several connected components, some of which are stable, and some of which are unstable prior to adding marked points, then we impose the integral condition 19 for vector fields over the domains that are stable without adding marked points, and the marked point condition in Convention 3.3 for domains are stable only after adding marked points. This picks out the subspace .
We now explain our definition of . Recall is a segment of a gradient trajectory that has coordinates , with the segment of interest being , with exponential weight with peak at . We recall the functionals, analogous to previous section: defined by
and we define
We now deform the pair to ensure our vector fields lie in the correct subspace. We first observe we can ensure lives in the image of by using the global translation of , i.e. when we first started talking about the degeneration of into and , we translate by so that always converges to in via a vector field that lives in image of . This degree of freedom is afforded to us by the fact that the problem is invariant. Hence we next focus on vector fields and . We imagine is fixed in place. To make live in the image of , we change . This changes the pregluing domain: as well as the associated map into , which is given by
The effect of changing changes the length of the finite gradient trajectory that is glued between and . Naturally changing the preglued map also deforms the global vector field and its cutoffs. (Adjusting our cut off functions accordingly). We observe to make live in the image of we need to lengthen/shorten the glued cylinder by -length , this corresponds to a of size . After this adjustment, if we take sufficiently small, the global vector field still has size bounded above by (or in the case we will need, ), and hence the same is true of its cut offs.
Finally we turn our attention to . To do this we need the following lemma:
Lemma 10.5.
for .
Proof.
Follows directly from exponential decay estimates ∎
Observe this upper bound is extremely small in the following sense. If we consider the vector field where and measured the size of this vector field over with domain , with the exponential weight , we would still get an extraordinarily small number, of size , which goes to zero as . This means we can apply a constant translation of form over to the vector field to try to make it land in while still keeping its overall norm . In practice this is done by further adjusting the pair of asymptotic vectors used in the pregluing, which we take up in the next lemma.
Lemma 10.6.
By adjusting the pair of asymptotic vectors we can make while keeping its norm . We can also maintain the vector fields are still within the image of .
Proof.
We examine for one by one, as the different cases are relatively independent of each other.
Let us consider . The idea is to change both and in the same direction, which we denote by , and preglue to a different gradient trajectory , but the trouble is as we change to , the new gradient trajectory connecting to travels a different amount of distance as (the variable for ) ranges from to , hence there must be a corresponding deformation in the pair of asymptotic vectors and to make the curves still match up and glue. Further we must also choose the deformation of and so that . Said differently we deform and so that there is no induced global translation of or that enters the pregluing. This is always possible. The exact expressions for these quantities are not so important, the important information is their sizes. The size of is , to make the new evaluate to under , the corresponding change to is also of size , which we absorb into our notation . It is also apparent after this deformation all vector fields are still small. Next we adjust both and by to make . We adjust and by the same amount in the same direction so as to maintain . It is clear this will land in and keep the norm of small.
Finally we consider . We shift by size , and twist the segment of gradient trajectory along with it. But we do not change , hence there is an new identification near the end. The result is a new , denoted by the same symbol by abuse of notation, so that . We also observe by the previous discussion the norm of changed at most by .
It is also clear that this process will keep in the image of because the regions in which we are performing these deformations are disjoint. ∎
To summarize:
Proposition 10.7.
We can choose suitable asymptotic vectors , , from which to construct a preglued domain that decomposes as
where represents variation of complex structure on , and we let denote the segment of gradient trajectory whose domain is . There is a preglueing map that agrees with our prescription for constructing pregluing maps in Section 8, so that there exists a vector field so that
If we split into components that live over , using cut off functions as we did in our gluing sections. The resulting vector fields satisfy
and they all have norm when measured with exponential weights. For this means and . We remark here we are bounding the size of our vector fields by , but it practice we can make them as small as we please, by , for instance.
Now we are in the position to extend and to solutions of , but before that we need to take a detour on linear operators.
10.3 A detour on linear operators
In this detour of a subsection we prove several key facts about linear operators to be used later. Naturally, very similar lemmas appear in Section 3 of [HT09] since we are using their strategy for surjectivity of gluing.
We shall first consider the case for semi-infinite trajectories, then we will do the case for finite gradient trajectories.
We shall first work out the case for , then deduce the necessary results from Morrey’s embedding theorem. For this section we shall work with Sobolev regularity , this will not make a difference to us since elliptic regularity will afford us all the regularity we need.
Let
be a semi-infinite gradient trajectory, equipped with linearized operator
| (20) |
where corresponds to the linearized operator of the Morse-Bott contact form, and is a operator of the form is the correction due to having used the almost complex structure.
We equip it with the weighted Sobolev space where
We conjugate this over to at which point it becomes
| (21) |
Let’s first consider the restriction of to , which we shall denote by . By the spectral theorem there exists an orthonormal basis of given by eigenfunctions of , which we write as with eigenvalue . By assumption is not an eigenvalue of , and by convention we say for and vice versa.
Theorem 10.8.
There is a continuous trace operator given as follows, if :
The norm in is given as follows, every has a Fourier expansion
then the norm is equivalent to following expression:
Proof.
This is a standard theorem in analysis, for a description of this see for instance proof of Lemma 3.7 in [HT09]. ∎
Then we come to the first main theorem of this detour.
Theorem 10.9.
Let denote the subspace of such that for all , let denote the projection. Then the map taking
is an isomorphism.
Proof.
We can solve this equation explicitly. Given a pair , we can write
where
The usual Sobolev norms are equivalent to the expressions we’ve written above. Comparing term by term we see that satisfies the following ODE:
with boundary condition for all . They have solutions
where the term only appears for . We need to verify several things:
-
a.
The terms and are in .
-
b.
.
The first item says our constructed solution lives in our Sobolev space, the second item says its norm is upper bounded by our input.
First consider , its norm in is given by
and that this is finite after we sum over follows from our assumptions on . Similarly consider , its norm as measured in is given by
We have
and we need to take derivatives up to . We remind ourselves we need to place upper bounds on terms of the form , hence from above it suffices to bound terms of the form
The first term is bounded by the norm of . The second term really is the norm of multiplied by . We use a technique (probably much more well known) we found in [Don02], Chapter 3. We first observe by Sobolev embedding our functions are at least , so we can use the fundamental theorem of calculus. We then consider the defining equation for
from which we get
Integrate both sides from to get
where we used continuity to apply fundamental theorem of calculus. We also used the fact for any fixed , we have . Hence we get
From which we deduce the second term is also bounded by norm of and . Combining the above computations we see that our solution is indeed in , and the inequality
holds, from which we conclude the theorem. ∎
Corollary 10.10.
Let denote the operator restricted at , i.e. , then for small enough , the map is an isomorphism with inverse whose operator norm is uniformly bounded as .
Using the above results we come to the theorem we will really need later on:
Theorem 10.11.
For small enough , the operator is an isomorphism whose inverse has operator norm uniformly bounded with respect to .
Proof.
The proof is reminiscent of our original proof that (which we earlier denoted by ) has uniformly bounded inverse over the entire gradient trajectory, i.e. we approximate it by a sequence of operators over trivial cylinders.
Let be a large integer, choose for so that is the coordinate on the Morse-Bott torus of , we have , and is distance away from the critical point on the Morse-Bott torus corresponding to . We let denote the linearization of at the trivial cylinder located at on the Morse-Bott torus, and conjugated by exponential weights to remove exponential weight. In formulas we have
Uniformly in and and independently of , the are isomorphisms with uniformly bounded inverses . Then similar to previous section we construct the glued operator which satisfies
As before we construct an approximate inverse to , which we call via the following diagram:
where we clarify
The subscripts under denote the copies of Sobolev spaces in the direct sum. And the splitting map and the gluing map are defined exactly the same way we did in section 8. We observe as before this is uniformly bounded as . Let’s verify that this constructs an approximate inverse to . We first observe away from the gluing region
and near the gluing region as before we have
Hence we can construct a right inverse of with uniformly bounded norm. Next since is a uniformly bounded small perturbation of , it also has a uniformly bounded right inverse.
To see that this operator is injective, since we don’t have index calculations (versions of index theorems probably exist but we cannot find an easy reference) we take a more direct approach, in part inspired by the appendix of [CGH]. Suppose is of norm 1, consider , for definiteness we first assume for all the norm of restricted to is . Let , and consider . Then we can consider it to lie in the domain of . To estimate its image under , first consider
Observing that over we have , we have
where , but then the element
has norm , but lies in the kernel of , which is a contradiction.
Similarly, if the norm of when restricted to is for all , then we use a similar cut off function to view as element of and use the same process to produce a nonzero kernel of , which cannot exist since is an isomorphism.
∎
We now state the finite interval analogue of the above theorems for later use.
Theorem 10.12.
Let be a gradient trajectory. Let be the linearization of over with exponential weight removed via conjugation as above. We consider its restriction to , and the Sobolev space . Consider the two projections , where they project to the positive/ negative eigenvalues of . Then the map
defined by
is an isomorphism whose inverse has uniformly bounded norm as .
Proof.
As before we first show the map is an isomorphism with uniformly bounded inverse . This is essentially the same proof as before, i.e. if with , and then we still have the formulas
for and
for . This already implies injectivity. The same proof shows exists and is uniformly bounded as . To elaborate a bit further, we still need to estimate sizes of 3 kinds of terms. For definiteness we focus on the case . The terms we need to consider are of forms
-
a.
-
b.
-
c.
.
The first two terms work exactly the same way as before with replacing . The third term requires a bit more care in that when we tried to estimate the norm of , the domain of integration is different giving us an extra term via integration by parts. So instead we have
The additional term we need to estimate is . This is upper bounded by
The first term above, after multiplying by , is upper bounded by the norm of with the correct weight of . To examine the second term note it is bounded above by
by Cauchy-Schwartz, and this has the right weight of so that when we multiply by it is upper bounded by the norm of . This concludes the discussion of the third bullet point. Putting all of these together as in the semi-infinite case we see that the inverse is well defined, and its norm is uniformly bounded above as .
To conclude has uniformly bounded inverse we need to be slightly careful, since as the domain changes. Since the actual operator is a size perturbation of , then by the above we can construct a right inverse with uniform bound for and this implies surjectivity. To show injectivity we proceed similarly as before, we assume has norm and lives in the kernel of , then , then the element
is an element of norm in the kernel of , contradiction. ∎
10.4 Surjectivity of gluing
In this subsection we finally prove surjectivity of gluing in our simplified setting. The idea is that we shall extend our vector fields so that they satisfy the set of equations , subject to our choice of right inverses, which we constructed in the pregluing section. Then this shows our holomorphic curve can be realized as a solution of . Since we proved such solution is unique, this shows gluing is surjective. We will first focus on extending the vector fields over the intermediate finite gradient trajectory. The extension to semi-infinte trajectories is similar but independent of this process so will be treated separately.
We remark additionally since there are exponential weights in place, we clarify our notation: when we write a vector field without ′, we think of it as living in some exponentially weighted Sobolev space, when we write we think of it as living in an unweighted space where the weight has been removed by multiplication with the exponential weight. When we write we will always mean the exponential weight ; we will write if a more complicated weight is used.
Finally we remark that we will work with Sobolev exponent , then extend our result for , since all of our linear theory was only worked out for . We first observe by virtue of being -holomorphic, the vector fields already satisfy at most places. We focus on what happens around and where is glued to the finite gradient cylinder simply for ease of notation. Entirely analogous statements hold for .
Proposition 10.13.
For , the vector field satisfies .
For , the vector field satisfies . An entirely analogous statement is true near .
Because of our choice cut off functions, the global vector field agrees with at and at . Here we use coordinates, and see next proposition for using coordinates.
Proposition 10.14.
There exists a unique vector field of norm less than over where that satisfies
and is -holomorphic. An entirely analogous statement holds near the ends of .
Proof.
The -holomorphicity condition amounts to solving a equation of the form
where is an expression bounded above in by . We next remove the exponential weights to get an equation
where we also have . Then finding a solution to this equation with prescribed boundary conditions amounts to finding a fixed point of the map
defined by
where is inverse of the operator , and is multiplied with the inverse of the exponential weight. That exists, is an isomorphism with uniformly bounded norm follows from previous section on linear analysis. That is a contraction mapping principle follows the fact is quadratic, the images of projection maps are independent of the input , as well as the fact that the norm of is uniformly bounded as . The fact that sends ball to itself is inherited in the fact is quadratic. We also need to recall from previous estimates that the norms of (hence its norm) can be made arbitrarily small as we take and the norms of and are uniformly bounded, which ensure the image of the contraction map land easily in the ball in the codomain (in our previous propositions we used to bound the norms, and this is where it comes in). The theorem now follows from contraction mapping principle. ∎
We next extend and to solutions of and for and . We recall there is a slight subtlety in that near the pregluing at there is a twist in the domain, i.e. an identification , and the vector fields over have coordinates . We will be careful to make this identification, though we remark it doesn’t cause any difficulties.
Proposition 10.15.
There are vector fields , defined over and respectively, both of norm so that
where the exponential weight looks like over and over . Further, we have the boundary conditions that
Proof.
We immediately switch to primed coordinates by removing the weight. In these primed coordinates the equations look like
where can be upper bounded by quadratic expressions of , , and their derivatives, as in Remark 6.12. Likewise for
We remark for , the operator is the linearization of the along , with exponential weight removed via conjugation. The dependence on of the linearization appears in the quadratic term . The term is the corresponding error term which takes the form in pregluing section (it is slightly different since we are using as the linear operator, but this is of no consequence). For , is the linearization of along with exponential weights removed.
Then finding an solution to the equation is tantamount to finding a fixed point of the operator
defined by:
Where is the inverse to the pair where take place at . is the inverse to where takes place at . It follows as in the previous proposition that is a contraction, from the ball to itself, and translating back to the weighted Sobolev spaces proves our theorem. ∎
It follows from the above proposition and uniqueness that the extensions extend smoothly past and , and they recover :
Proposition 10.16.
The concatenation of at with at is of class , we denote the resulting vector field by , with slight abuse in notation. A similar story holds for . The resulting vector fields and are in and respectively, and satisfy the pair of equations .
Proof.
By Proposition 10.14 there exists a unique vector field over satisfying the boundary conditions imposed by , and by whose deformation of makes the resulting surface -holomorphic. But observe satisfy these conditions as well by virtue of the defining conditions for the pair , and : that they are solutions of the pair of equations . Hence we conclude agrees with over , and by our choice of cut off functions this implies the concatenation of with is smooth, and likewise for with . That we can take when we only constructed for follows from the fact that the vector fields and their first order derivatives have norm , and in which case we have their norm bounded above by powers of their norm. Hence in this case the extended parts and have their norm (over and respectively) bounded above by , and for small enough this lands in the ball in and respectively. ∎
We make one additional remark that the equations and also depends on the asymptotic vectors , but from our constructions these vectors have norm .
10.5 Extension of solutions near semi-infinite gradient trajectories
In this subsection we briefly outline how to carry out the above in the case where is glued to a semi-infinite gradient trajectory. This is simpler than the finite gradient case because we don’t need our vector fields to lie in .
Recall our conventions, we assume degenerates into the cascade . We focus on what happens near a positive puncture of , which has coordinate . For large we can recall the decomposition of the domain of
We will not worry about the other punctures of and only talk about . Similarly we can break down the domain of into
As above we will only care about and neglect other parts of .
Following our previous conventions, we take to be the that controls the size of balls we use in the contraction mapping principle and it is fixed for any choice of . Let the parameter depend on and go to zero as . We further introduce which we consider to be of the form to help bound various norms of vector fields as in the previous discussion.
The convergence to cascade implies for given , we can choose small enough so that there exists a vector field and variation of complex structure of so that
and for given , as , the norm of (we will take small enough so that it is bounded by ). We now turn our attention to the cylindrical end of , which is of the form .
Proposition 10.17.
For large, (which would take with it in order to satisfy our previous assumptions) we have converges in to trivial cylinders. This is also true uniformly, i.e. for given , there is a large enough so that for every small enough values of , is within (in the norm) of a trivial cylinder of the form for all values of so that .
Proof.
The same proof as Proposition 10.1. ∎
Therefore we can choose a large enough so that when is restricted to the conditions for asymptotic estimates are met, namely we have the following:
Proposition 10.18.
We take small enough so that previous convergence estimate near Morse-Bott torus applies. Then there is a large enough , so that for small enough (which depends on ), and for small enough (which depends on ), there is a gradient trajectory defined over the cylinder so that there is a vector field over so that
and the norm of measured in satisfies the bound
Retracing our footsteps we now construct a preglued curve . There is a trivial cylinder so that over the interval the difference between and is bounded above by , then choose so that for , the difference between
then using this choice of we construct a pregluing, by gluing together to as we did in the section for gluing. This constructs for us a preglued map
so that there exists a vector field so that over
We also have estimates of the size of :
Proposition 10.19.
Over the semi-infinite interval we impose the exponential weight , Then with respect to this exponential weight the norm of is bounded above by:
which can be made arbitrarily small by taking large and as . In particular for given we can upper bound its norm by by taking .
Proof.
The same proof as Proposition 10.3. ∎
Then we truncate into so that the pair solves the equations near the cylindrical end. Here is the equation living over the gradient cylinder , and lives over . This process is entirely analogous to the previous section, to wit, we apply the contraction mapping principle over domains of the form to show can be extended to solutions of . We note that we no longer need to worry whether lands in because there is no such requirement over . Further already lands inside image of because we arranged this when we preglued the finite gradient trajectories, and that conclusion is unaffected by extensions of near the cylindrical neck. Hence we apply the above to each of the ends of and in conjunction with the extension of vector fields along the finite gradient trajectories, we conclude :
Proposition 10.20.
The gluing construction is surjective in the case of 2-level cascades with one finite gradient cylinder segment in the intermediate cascade level. To be more precise, suppose degenerates into a transverse and rigid 2-level cascade , with only one finite gradient trajectory in the intermediate cascade level, then corresponds (up to translation) to the unique solution of the system of equations with our given choice of right inverses.
10.6 Multiple level cascades
In this subsection we generalize our result to multiple level cascades. The main subtlety is when two consecutive levels meet along multiple ends on an intermediate cascade level. Hence we take that up first in what follows. The main difficulty will be setting up notation.
10.6.1 2-level cascade meeting along multiple ends
Let converge to a 2 level cascade . Each is not necessarily connected. As before we first consider the finite gradient trajectories. The maps and meet along free ends in the middle. Consider the tuple where label the specific end, and denotes whether the end belongs to or . We fix cylindical ends around each puncture of the form (we won’t bother labelling these with to avoid further clutter of notation). Recall the vector spaces with asymptotic vectors we associate to each end that meets the intermediate cascade level of , which we denote by . Each of these vector spaces are spanned by asymptotic vectors , we denote an element of these vector spaces by triples . Recall there is a submanifold
within an ball of the origin of so that if we used elements in we would be able to construct a pregluing from the domains of and . Recall the reason we have to do this is that, as we recall, moving each affects the distance between and , and we need to make sure that the ends can be matched together.
Now given the degeneration of a -holomorphic curve to the cascade , let be large enough, for each end there is a gradient flow trajectory so that when restricted to the segment , we have that
and is very close to the gradient flow . Then as before we can constructed a preglued curve so that over the domain of the preglued curve, we have
for a global vector field whose norm can be taken to be arbitrarily small by picking large enough and (consequently) and small enough. Again here we are only worrying about the finite gradient trajectories, we will worry about the semi-infinite trajectories later.
Then we can split into a sum of several other vector fields as before, namely we can write
where for , and for . Using global translation of entire cascade we can ensure , and using a global increase in inside we can ensure also . Here the definition of is as before: we take compact neighborhoods of and require the integral of over these neighborhoods is zero. This defines a codimension one subspace which we take to be the image of .
Finally to ensure . As before by exponential decay estimates the actual size of vector fields to make are negligible compared to . The difference from the previous case is that now there are multiple ends to worry about. To do this we need some understanding of as a manifold.
Recall for near any point , its tangent space is spanned by
the functions have uniformly bounded norm. The reason they appear is because ends meeting at different values of travel different amounts of distance for the same change of , so a correction term is needed so the preglued curve can be constructed.
Recall that for we must have the functionals
For , this can be adjusted for each by a change in . For , we first repeat the previous construction for verbatim to get vector fields while keeping . I.e. we take so that it does not induce global translations in direction of the thick parts of as they enter the pregluing to ensure . For any other , the only constraint is , hence as before we first change simultaneously by to make and in this process we adjust to make the pregluing condition still hold. Finally we change by the same amount to make while preserving the previous equalities.
Using the same kind of machinery to extend the vector field to solutions of , and using the exactly the same set up for semi-infinite gradient trajectories, we arrive at the follow proposition:
Proposition 10.21.
If a sequence of -holomorphic curves degenerates into a transverse and rigid 2-level cascade , then comes from the unique solution to our gluing construction, namely, , subject to our choice of right inverses.
10.6.2 General case
The general case proceeds largely analogously to the 2-level case. We shall be very brief in sketching it out. Assuming degenerates into an -level transverse and rigid cascade, , then we use the notation to denote a finite gradient trajectory connection between and , connecting between the th end in that intermediate cascade level. As before we can find a pregluing depending on the data so that there is a global vector field so that
where has very small norm. and as before we split
for the intermediate cascade levels. by adjusting the asymptotic vector fields we can ensure , and using the same kind of adjustments as above we make sure . Finally using the same analysis we extend them to solutions of - here we just mean the system of equations we used in the gluing construction, using the same kind of analysis to take case of semi-infinite gradient ends. Hence we have proved:
Theorem 10.22.
The gluing construction is surjective in the following sense: if converges to a -level transverse and rigid cascade . Then for each such cascade after our choice of right inverses we constructed a unique glued curve for small enough, and agrees with this glued curve up to translation in the symplectization direction.
Remark 10.23.
We note our theorem about correspondence between transverse rigid cascades and rigid -holomorphic curves studies the correspondence of a single cascade and a single curve. Usually in Floer theory one needs to show the collection of all transverse and rigid cascades is in bijection with the collection of all rigid holomorphic curves. To apply our results in these circumstances one usually needs some finiteness assumptions on the cascades and the holomorphic curves. For more details see [Yao].
Appendix A Appendix: SFT compactness for cascades
In this appendix we outline the SFT compactness result required for the degeneration of holomorphic curves to cascades.
We borrow heavily the results and notation from the original SFT compactness paper [Bou+03]. In fact our compactness theorem will follow from their setup in combination with our estimates of how -holomorphic curves behave near Morse-Bott tori. The behaviour of holomorphic curves near a Morse-Bot torus is already discussed in Chapter 4 of [Bou02], and is implicit in [BO09], for example their Section 4.2 and Appendix. Hence this appendix is more of an expository nature for the sake of completeness, and we will point out the differences and similarities between our results and theirs in the course of proving our version of SFT compactness theorem.
A.1 Deligne-Mumford moduli space of Riemann surfaces
We begin with a review of the Deligne- Mumford compactification of stable Riemann surfaces. Most of the material in this section is taken directly from Section 4 of [Bou+03], but is repeated for the convenience of the reader.
Let denote a closed Riemann surface with complex structure with marked points set . The surface is called stable if , where is the genus and is the number of marked points. Stability implies the automorphism group of the surface is finite.
The uniformization theorem equips with a unique complete hyperbolic metric of constant curvature and finite volume, which we denote by . Each puncture in corresponds to a cusp in the metric. We let denote the moduli space of Riemann surfaces of signature .
A.1.1 Thick-Thin decomposition
Fix , given a stable Riemann surface , for let denote the injectivity radius of at . As in Section 4 of [Bou+03], we denote by and its -thin and thick parts where
It is a fact of hyperbolic geometry that there is a constant so that for all we have each component of is conformally equivalent to either a finite cylinder of the form or semi-infintie cylinder . Each compact component of the form contains a unique closed geodesic of length equal to , which we denote by . Here we set .
A.1.2 Oriented blow up of punctured Riemann surface
Given , let , then as in [Bou+03] we can define the oriented blow up as the circle compactification of with boundary . The complex structure defines an action on . The surface comes equipped with a map which collapses the blown up circle. Given a finite set we can similarly define the blown up space with boundary circles , with projection that collapses the boundary circles.
A.2 Stable nodal Riemann surface
See Section 4.4 in [Bou+03]. Let be a possibly disconnected Riemann surface, where are both marked points, and the cardinality of is even. We write . The nodal Riemann surface is the tuple under the additional equivalence relations so that each pair and the set of all such special pairs are unordered.
From a given nodal Riemann surface we can construct the following singular surface
| (22) |
The arithmetic genus of a nodal Riemann surface is defined to be , where is the number of connected components of . The signature of a nodal Riemann surface is given by the pair , where is the arithmetic genus and is the number of marked points in .
A stable Riemann surface is called decorated if for each pair we include the information of orientation reversing orthogonal map
| (23) |
We also consider partially decorated Riemann surfaces where such maps are only given for a subset .
We consider the moduli space of nodal Riemann surfaces and decorated nodal Riemann surface of signature . The moduli space of smooth Riemann surfaces of signature , which we write as , includes naturally in the above spaces. We refer the reader to Section 4.5 in [Bou+03] for detailed topologies of these spaces. For us we only need the notion of convergence, which we summarize below.
Given a decorated stable nodal Riemann surface ( denotes the decoration), which we write as , we first take its oriented blow up along points of , to obtain boundary circles and associated to the pair , then using the orthogonal maps , we glue the resulting pieces together along and call the resulting surface . The glued copy of and is called . The surface has the same genus as the arithmetic genus of , and inherits a uniformizing metric from , which we write as . The metric is defined away from the and points of . We can talk about the thick/thin components of and view them as subsets of . Every compact component of is a compact annulus, it has either a closed geodesic which we denote by , or one of the special circles constructed above, which we will also denote by .
Let be a sequence of decorated stable nodal Riemann surfaces. We say converges to a nodal stable Riemann surface if for large enough there are diffeomorphisms with , and the following conditions hold (Section 4.5 in [Bou+03]):
-
•
For all , the images of the special circles for are special circles or closed geodesics of the metrics on . Moreover, all special circles on are among these images.
-
•
in where .
-
•
Given a component of , which contains a special circle , and given a point , we consider for every the geodesic arc for the induced metric , which intersects orthogonally at (even though the distance is infinite it still makes sense to talk about geodesics intersecting orthogonally at infinity), and whose ends are contained in the -thick parts of . Then converges as in as a continuous geodesic for which passes through the point .
We note that is equivalent to in . The topology on is defined to be the weakest topology for which the forgetful map defined by forgetting the is continuous. Finally the compactness theorem.
Theorem A.1 (Theorem 4.2 in [Bou+03]).
The spaces and are compact metric spaces that contain , and are equal to the closure of the inclusion of (i.e. they are compactifications of ). As we are in a metric space, sequential compactness suffices.
We now state a proposition which we will later need to find all components of a holomorphic building/cascade.
Proposition A.2 (Proposition 4.3 in [Bou+03]).
Let be a sequence of smooth marked nodal Riemann surfaces of signature which converges to a nodal curve of signature . Suppose for each we are given a pair of points so that
| (24) |
where is with respect to the hyperbolic metric . Suppose in addition there is a sequence such that there exists injective holomorphic maps where is the disk in with radius ,satisfying . Then there exists a subsequence of the new sequence which converges to a nodal curve of signature , which has one or two additional spherical components. One of these components contains the marked points , which corresponds to the sequence . The possible cases are illustrated in Fig 5 of [Bou+03].
Stated in words (and also explained in Section 4 of [Bou+03]), the scenarios are as follows. Let and be decorations on stable nodal Riemann surfaces and respectively, and we have in the sense specified above, and be the corresponding diffeomorphism. Let be the singular nodal Riemann surface obtained from by gluing together the nodal points , and the associated projection. Let . Then the following can happen:
-
•
The points converge to a point , which does not belong to or . Then the limit of has an extra sphere attached at on which lie two extra points .
-
•
The points converge to a marked point . In this case the limit is with two extra sphere and attached. The sphere is attached at to the original , and has at its zero. The sphere has its point attached to and lie on .
-
•
The points converge to a double point corresponding to pair of points . Then we insert a sphere between nodes , with attached to on and attached to . We insert a second sphere whose point is attached to in , and the two points and lie on .
A.3 SFT compactness theorem for Morse-Bott degenerations
We are now ready to state the SFT compactness theorem for degeneration of holomorphic curves to cascades. We first state a more careful definition of holomorphic cascades of height 1, taking into account of decorations. This is also taken directly out of [Bou+03].
Recall is a Morse-Bott contact form, and is its perturbation defined by . Fix , then for all small enough all Reeb orbits with action come from critical points of on each Morse-Bott torus.
Definition A.3 (Section 11.2 in [Bou+03]).
Suppose we are given:
-
•
nodal stable -holomorphic curves
(25) where is a -holomorphic map from to . The map goes from to , the symplectization direction; and is the map to . The sets correspond to punctures that are asymptotic to Reeb orbits hit by at and respectively. Let denote the corresponding boundary circle after blowing up the marked points , respectively.
-
•
collections of cylinders that are lifts of gradient trajectories of along the Morse-Bott tori, which we write as
(26) In the above, indexes which collection the cylinder is in, and indexes specific element in that collection. Said another way, indexes the specific level in the cascade, and refers to which gradient flow segment in the level. The numbers denotes the flow time along gradient flow of , with , , for . Denote the domain of the cylinders by , and their boundary circles corresponding at positive/negative ends. Even though the gradient flows may be finite, we think of these domain cylinders as infinitely long, and will think of them as living in the thin part of the glued domain Riemann surface. We do this even if the flow time is zero.
-
•
Each positive puncture of (with ) is matched with a negative puncture of , where they cover Reeb orbits on the same Morse-Bott torus of the same multiplicity. Between these two matched pair of punctures there is a unique gradient trajectory that connects between them after gradient flow of time . Then there are orientation reversing diffeomorphisms and which are orthogonal on each boundary component.
-
•
We glue the domains and via the maps and , to obtain a surface
(27) The maps and fit together to define a continous map from . Here for defining , on the gradient segment parts we use the literal gradient flow of without re-scaling by .
-
•
For the surface , we describe its complex structure. The idea is to keep the thin parts corresponding to , and insert between them an infinite cylinder corresponding to the connecting gradient trajectory (with one marked point added to make it stable), with now viewed as nodal points which comes with their own special circles. In our case, two points among are viewed as nodal points for each gradient segment we are gluing in. Then the new decorated Riemann surface underlying the cascade can then be written as
(28) (29) We note this does not necessarily guarantee the stability of the underlying domain , since the definitions of stability of Riemann surface and holomorphic curves are distinct (see remark below). However we can always add several marked points to make the underlying nodal Riemann surface stable.
Then we say we have defined a level holomorphic cascade of curves of height 1.
Remark A.4.
In the above definition by stable we mean stable in the sense of - holomorphic curves, i.e. no level consists purely of trivial cylinders, and if a component of holomorphic curve is constant, then the underlying domain for that component is stable in the sense of Riemann surfaces. We will treat the issue of stability of domain separately.
The definition of height holomorphic cascade is very similar, we stack height 1 cascades on top of one another, and identify the edge punctures with maps like and . The definition of when two cascades are equivalent to one another is identical to the definition in Section 7.2 of [Bou+03] of when two SFT buildings are equivalent to one another, with the addition that we think of gradient flow trajectories in the cascade as extra levels with marked points.
Then we are ready to state the SFT compactness result.
Definition A.5 (Section 11.2 of [Bou+03]).
Let be a sequence of -holomorphic curves. And let be a height holomorphic cascade (we allow infinite flow times), and let be the underlying decorated nodal Riemann surface. We say converges to if we can find an extra set of marked points on , and an extra sequence of marked points on to make the underlying nodal Riemann surfaces stable, with diffeomorphisms with and satisfying the convergence definition of stable decorated Riemann surfaces in , and suppose in addition the following conditions hold:
-
•
For every component of which is not a cylinder coming from a gradient flow, identify the corresponding component in , and if we write and similarly for . Then converges to in
-
•
If is the union of components of which correspond to the same level of height of , (recall specifying height specifies a height 1 cascade, and labels the level within that height 1 cascade), then there exists sequences so that in
Then we say the sequence of -holomorphic curves are convergent to the -holomorphic cascade .
Theorem A.6.
[Theorem 11.4 in [Bou+03]] Let and , let denote a sequence of -holomorphic curves of fixed signature and asymptotic to the same Reeb orbits (recall as long as and all orbits have energy , the orbit themselves do not depend on ), then there exists a subsequence that converges to a -holomorphic cascade of height .
The rest of this appendix is dedicated to the proof of this theorem. First a theorem on gradient bounds:
Theorem A.7.
(Gradient Bounds, Lemma 10.7 in [Bou+03]) Let and be a sequence of -holomorphic curves with fixed signature, and the curves have a uniform energy bound . Then by Deligne-Mumford compactness the domain converges in the sense of to a decorated Riemann surface
Then there exists a constant which only depends on the upper energy bound so that if we add to each an additional collection of marked points
we have the following uniform gradient bound
| (30) |
Here the gradient is measured with respect the fixed invariant metric in in conjunction with the hyperbolic metric on , and is the injectivity radius of the hyperbolic metric at .
Proof.
The same proof as in for Lemma 10.7 in [Bou+03] goes through. The only two observations needed are: first the analogue of lemma 5.11 continues to hold even as we take . The second observation is that due to Morse-Bott assumption each plane or sphere that bubbles off also has a lower nonzero bound on energy, so the set of points that bubbles off is finite. ∎
Proof of Theorem A.6.
Step 1. We first discuss convergence in the thick parts. The discussion largely mirrors the discussion of [Bou+03] Section 10.2.2. Following the setup in Theorem A.7, we assume we have added enough marked points to the converging Riemann surfaces so that the gradient bound holds everywhere away from the marked points. We call the limit of the sequence . We let denote the special circles on , then we may assume
where is the diffeomorphism from (defined away from the nodes) given by the definition of convergence. Then by Azerla-Ascoli and Gromov-Schwarz we can extract a subsequence that over the thick parts of converges in to a holomorphic map defined on thick parts of .
Step 2. Next we consider what happens on the thin parts near a node, following [Bou+03] Section 10.2.3. Let denote the connected components of , we have from the above discussion that converges to -holomorphic maps in over each of . Call these maps . The point is in this description there may be levels missing near the nodes that connect between , and by examining closely what happens near the nodes we recover the entire cascade.
The first case is if is bounded in near one of the nodes, then by the removal of singularities theorem then extends continuously to the node. If is unbounded near a node then it must converge to a Reeb orbit, and extend continuously to the circle at infinity which compactifies the puncture.
Given a pair of components of , call them and , that are adjacent to each other. The behaviour of and could be quite different. The maps and may be asymptotic to either a point or a Reeb orbit at their connecting node, and even if they are both asymptotic to Reeb orbits they might not even be asymptotic to the same one (not even Reeb orbits that land on the same Morse-Bott torus). The reason for this, as explained above, is that there may be further degenerations of the curve near this node. To capture this idea, let denote the the asymptotic limit of and (which could be either a point or a Reeb orbit), then there is a component of the -thin region of the hyperbolic metric on , with conformal parametrization
such that in
Note that can be chosen to satisfy
where the norm on the left hand side is measured with respect to the flat metric on the source and the hyperbolic metric on the target. Then under this parametrization we have
and if we take a subsequence of (also denoted by ), then we have
and hence obtain a homotopically unique map satisfying and .
Sinice we have a uniform bound on , by Azerla-Ascoli it converges in to holomorphic curves (which specfic curve it converges to might depend on which shift we are considering on the domain, this is akin to the degeneration of a gradient flow line to a broken gradient flow line in the Morse case). We break it down in to cases:
-
•
-
•
.
Case 1: We first consider when . If both are points, then they are connected by a sequence of -holomorphic spheres touching each other at nodes, however in symplectizations all holomorphic sphere are points, so in this case are the same point.
If one of the ends (say ) is a Reeb orbit, and is a point. The fact that converges in implies we can find a holomorphic plane with as its positive puncture. But then this holomorphic plane must have zero energy, which contradicts the Morse-Bott assumption.
The last case is if both are Reeb orbits. Then they must lie on the same Morse-Bott Torus, because the energy of the segment approaches zero as , and there is not enough energy to support a cylinder connecting Reeb orbits from one Morse-Bott torus to another, hence the Reeb orbits must lie on the same Morse-Bott torus.
Then by Lemma 10.1 for large enough the derivatives of are pointwise bounded by , then by Propositions 9.3, 9.1, there is a number , a segment of gradient trajectory of of time , lifted to be a -holomorphic curve, which we denote by , such that after taking a subsequence, over , is close to .
To elaborate a bit more, we note Propositions 9.3, 9.1 only apply when we can establish the segment of -holomorphic cylinder is uniformly bounded away from all except at most one critical point of . If this is not the case, then necessarily . We assume approaches the minimum of and approaches the maximum of . Then we can choose so that restricted to is uniformly bounded away from the maximum of , and its restriction to is uniformly bounded away from the minimum of . Then we apply Proposition 9.1 to find two semi-infinite gradient cylinders and to which the restriction of to (resp. converges in norm. By local convergence the restriction of and to are close to each other, so for our purposes666Establishing exponential decay estimates for gradient flow lines that go from critical point of to another critical point requires more careful analysis, and is outside the scope of this work. Incidentally this is related to the problem of gluing cascades of height greater than 1 - we need to think more carefully about how we choose our Sobolev spaces and place our exponential weights. 777We mention here our work is simplified because our critical manifold (the manifold that parametrizes the space of Reeb orbits) is , hence there are no broken gradient trajectories. In the case where the critical manifold is higher dimensional the analysis near broken trajectories is more delicate, and is outside the scope of the current work. However it is probably within the convex span of current technology. we can take to be either or .
The estimate we proved for its local behaviour also tells us how to define the relevant gluing maps and . We should also attach a marked point to this cylindrical segment to make the domain stable.
Case 2: We consider the second case . We first observe that there is a lower bound on by the Morse-Bott assumption. We shall see that over the map converges to a sequence of holomorphic cylinders (and in the case where is a point, a collection of cylinders followed by a -holomorphic plane) connected by gradient cylinders along Morse-Bott tori similar to the previous case. We first observe by the gradient bounds that there is no bubbling off of holomorphic planes, and that over any compact domain of the sequence converges uniformly to a holomorphic curve. We note this is very similar to the case in Morse theory where a gradient trajectory converges to a broken gradient trajectory.
Let denote the minimal energy of a nontrivial holomorphic curve in the Morse-Bott setting, after successively taking subsequences, we pick out numbers which partition the interval so that the following holds:
-
•
, .
-
•
converges uniformly to a nontrivial holomorphic curve over .
-
•
restricted to has energy . We shall show that in fact the energy goes to zero as .
We first observe by our assumptions there must be an interval of the form , because otherwise the entire interval the curve has energy less than , hence over each compact subset the curve converges to trivial cylinders, then this implies that and are on the same Morse-Bott torus, which is the situation in case 1.
We note in the second bullet point we required uniform convergence over the interval , as opposed to the usual convergence over compact set. The reason is that if we had convergence over an interval of the form , and by looking at different compact subsets in the domain we got convergence in into two different curves, we could have inserted more partitions into the interval until the three bullet points above are achieved.
We also observe that the evaluation maps and land in the same Morse-Bott torus, since over the energy is too small to cross from one Morse-Bott torus to the next, hence in fact the energy of over converges to zero. As in the proof of the previous case, over the interval , the map converges uniformly to a gradient flow trajectory , as was shown in the previous case. As a technical point, once we have found and , we should identify the region when they first enter the Morse-Bott torus, and perform the analysis as we did in propositions 9.3, 9.1 to identify the correct length of the gradient trajectory (this may result in us moving the partition points to lengthen the segment that we think of as being the gradient trajectory). We add marked points to both domains of and to make the domain stable, and the gluing map and are naturally supplied by considerations of convergence.
Step 3: We remark that the behaviour of near a puncture (either symptotic to a Reeb orbit or to a point), around which the hyperbolic metric produces another thin region, is entirely analogous to the analysis we performed above: we can choose a cylindrical neighborhood of the form or , and along this neighborhood the curve reparametrized as above degenerates into a cascade of cylinders connected by Morse flow lines. The only additional piece of information which follows readily is that if in the original is asymptotic to near this puncture, then the end of the chain of holomorphic cylinders and gradient trajectories also is also asymptotic to .
Step 4: Finally we discuss the level structure.
Recall that after the previous modifications the domain of converges to a stable Riemann surface so that each connected component of is assigned either a -holomorphic curve , or a gradient cylinder . We label the components of the domain associated with -holomorphic curves and those labeled with gradient flow cylinders . Now for each we pick a point and define an ordering that
if
and if and , we say . This ordering defines a level structure as in the SFT picture, then we add in the gradient flow by hand at each of the levels. We note that if a gradient flow flows across multiple levels of holomorphic curves, then it will appear at these levels as a trivial cylinder. With this convention we see that then the flow time at each intermediate cascade level is the same for all Morse-Bott tori on that level (if a gradient flow needed to flow longer it would simply appear as a trivial cylinder). Then we have the SFT compactness result as desired. ∎
References
- [AD14] Michèle Audin and Mihai Damian “Morse theory and Floer homology” Translated from the 2010 French original by Reinie Erné, Universitext Springer, London; EDP Sciences, Les Ulis, 2014, pp. xiv+596
- [AB95] D.. Austin and P.. Braam “Morse-Bott theory and equivariant cohomology” In The Floer memorial volume 133, Progr. Math. Birkhäuser, Basel, 1995, pp. 123–183
- [BH13] Augustin Banyaga and David E. Hurtubise “Cascades and perturbed Morse-Bott functions” In Algebr. Geom. Topol. 13.1, 2013, pp. 237–275
- [BC] Paul Biran and Octav Cornea “Quantum Structures for Lagrangian Submanifolds” arXiv:0708.4221 [math.SG]
- [Bou02] Frederic Bourgeois “A Morse-Bott approach to contact homology”, 2002
- [Bou+03] Frederic Bourgeois, Yakov Eliashberg, Helmut Hofer, Kris Wysocki and Eduard Zehnder “Compactness results in symplectic field theory” In Geometry & Topology 7.2, 2003, pp. 799–888
- [BO09] Frédéric Bourgeois and Alexandru Oancea “Symplectic homology, autonomous Hamiltonians, and Morse-Bott moduli spaces” In Duke Math. J. 146.1, 2009, pp. 71–174
- [Che21] Guanheng Chen “On cobordism maps on periodic Floer homology” In Algebr. Geom. Topol. 21.1, 2021, pp. 1–103
- [Cho16] Keon Choi “Combinatorial embedded contact homology for toric contact manifolds”, 2016 arXiv:1608.07988 [math.SG]
- [Cho+14] Keon Choi, Daniel Cristofaro-Gardiner, David Frenkel, Michael Hutchings and Vinicius Gripp Barros Ramos “Symplectic embeddings into four-dimensional concave toric domains” In J. Topol. 7.4, 2014, pp. 1054–1076
- [CM07] Kai Cieliebak and Klaus Mohnke “Symplectic hypersurfaces and transversality in Gromov-Witten theory” In J. Symplectic Geom. 5.3, 2007, pp. 281–356
- [CGH] Vincent Colin, Paolo Ghiggini and Ko Honda “Embedded contact homology and open book decompositions” arXiv:1008.2734 [math.SG]
- [Don02] S.. Donaldson “Floer homology groups in Yang-Mills theory” With the assistance of M. Furuta and D. Kotschick 147, Cambridge Tracts in Mathematics Cambridge University Press, Cambridge, 2002, pp. viii+236
- [Far11] David Farris “The embedded contact homology of nontrivial circle bundles over Riemann surfaces”, 2011
- [Flo88] Andreas Floer “The unregularized gradient flow of the symplectic action” In Comm. Pure Appl. Math. 41.6, 1988, pp. 775–813
- [Fra04] Urs Frauenfelder “The Arnold-Givental conjecture and moment Floer homology” In Int. Math. Res. Not., 2004, pp. 2179–2269
- [Fuk96] Kenji Fukaya “Floer homology of connected sum of homology -spheres” In Topology 35.1, 1996, pp. 89–136
- [Ger20] Chris Gerig “Taming the pseudoholomorphic beasts in ” In Geom. Topol. 24.4, 2020, pp. 1791–1839
- [Ger] Chris Gerig “Seiberg-Witten and Gromov invariants for self-dual harmonic 2-forms” arXiv eprint: 1809.03405
- [Gut14] Jean Gutt “Generalized Conley-Zehnder index” In Annales de la faculté des sciences de Toulouse Mathématiques 23.4 Université Paul Sabatier, Toulouse, 2014, pp. 907–932
- [Her98] David Hermann “Non-equivalence of Symplectic Capacities for Open Sets with Restricted Contact Type Boundary”, 1998
- [HWZ96] H. Hofer, K. Wysocki and E. Zehnder “Properties of pseudoholomorphic curves in symplectisation. IV. Asymptotics with degeneracies” In Contact and symplectic geometry (Cambridge, 1994) 8, Publ. Newton Inst. Cambridge Univ. Press, Cambridge, 1996, pp. 78–117
- [HWZ96a] Helmut Hofer, K. Wysocki and E. Zehnder “Properties of pseudoholomorphic curves in symplectisations. I : asymptotics” In Annales de l’I.H.P. Analyse non linéaire 13.3 Gauthier-Villars, 1996, pp. 337–379
- [Hur13] David E. Hurtubise “Three approaches to Morse-Bott homology” In Afr. Diaspora J. Math. 14.2, 2013, pp. 145–177
- [Hut16] Michael Hutchings “Beyond ECH capacities” In Geom. Topol. 20.2, 2016, pp. 1085–1126
- [HN16] Michael Hutchings and Jo Nelson “Cylindrical contact homology for dynamically convex contact forms in three dimensions” In J. Symplectic Geom. 14.4, 2016, pp. 983–1012
- [HN19] Michael Hutchings and Jo Nelson “-equivariant contact homology for hypertight contact forms” arXiv, 2019 eprint: 1906.03457
- [HN20] Michael Hutchings and Jo Nelson “Axiomatic Morse-Bott theory” In Algebr. Geom. Topol. 20.4, 2020, pp. 1641–1690
- [HS05] Michael Hutchings and Michael Sullivan “The periodic Floer homology of a Dehn twist” In Algebr. Geom. Topol. 5, 2005, pp. 301–354
- [HS06] Michael Hutchings and Michael Sullivan “Rounding corners of polygons and the embedded contact homology of ” In Geom. Topol. 10, 2006, pp. 169–266
- [HT07] Michael Hutchings and Clifford Henry Taubes “Gluing pseudoholomorphic curves along branched covered cylinders. I” In J. Symplectic Geom. 5.1, 2007, pp. 43–137
- [HT09] Michael Hutchings and Clifford Henry Taubes “Gluing pseudoholomorphic curves along branched covered cylinders. II” In J. Symplectic Geom. 7.1, 2009, pp. 29–133
- [Lin18] Francesco Lin “A Morse-Bott approach to monopole Floer homology and the triangulation conjecture” In Mem. Amer. Math. Soc. 255.1221, 2018, pp. v+162
- [MS12] Dusa McDuff and Dietmar Salamon “-holomorphic curves and symplectic topology” 52, American Mathematical Society Colloquium Publications American Mathematical Society, Providence, RI, 2012, pp. xiv+726
- [Nel20] Jo Nelson “Automatic transversality in contact homology II: filtrations and computations” In Proc. Lond. Math. Soc. (3) 120.6, 2020, pp. 853–917
- [NW] Jo Nelson and Morgan Weiler “Embedded contact homology of prequantization bundles” arXiv:2007.13883 [math.SG]
- [OW18] Yong-Geun Oh and Rui Wang “Analysis of contact Cauchy-Riemann maps II: Canonical neighborhoods and exponential convergence for the Morse-Bott case” In Nagoya Math. J. 231, 2018, pp. 128–223
- [OZ] Yong-Geun Oh and Ke Zhu “Partial collapsing degeneration of Floer trajectories and adiabatic gluing” arXiv eprint: 1103.3525v3
- [Par19] John Pardon “Contact homology and virtual fundamental cycles” In J. Amer. Math. Soc. 32.3, 2019, pp. 825–919
- [Roo] Jacob Rooney “Cobordism maps in embedded contact homology” arXiv:1912.01048 [math.SG]
- [Wen10] Chris Wendl “Automatic transversality and orbifolds of punctured holomorphic curves in dimension four” In Commentarii Mathematici Helvetici, 2010, pp. 347–407
- [Yao] Yuan Yao “Computing Embedded Contact Homology in Morse-Bott Settings” In preparation
- [Zho] Zhengyi Zhou “Morse-Bott Cohomology from Homological Perturbation Theory” arXiv:1902.06587 [math.SG]