Global bifurcation structure and geometric properties for steady periodic water waves with vorticity
Abstract.
This paper studies the classical water wave problem with vorticity described by the Euler equations with a free surface under the influence of gravity over a flat bottom. Based on fundamental work [5], we first obtain two continuous bifurcation curves which meet the laminar flow only one time by using modified analytic bifurcation theorem. They are symmetric waves whose profiles are monotone between each crest and trough. Furthermore, we find that there is at least one inflection point on the wave profile between successive crests and troughs and the free surface is strictly concave at any crest and strictly convex at any trough. In addition, for favorable vorticity, we prove that the vertical displacement of water waves decreases with depth.
Key Words: water wave; vorticity; analytic global bifurcation; inflection point
1. Introduction
It’s often possible for us to observe water wave while watching the sea or a lake. In fact, the systematic study of irrotational water waves can date back to the 1840s. In 1847, Stokes [14] conjectured the existence of a large amplitude periodic wave with a stagnation point and a corner containing an angle of 120∘ at its highest point. The first rigorous constructions by power series of such waves due to Nekrasov [12], which were local in the sense that the wave profiles were almost flat. Constructions of large-amplitude irrotational waves were begun by Krasovskii [11] which were refined by Keady and Norbury [10] by using the methods of global bifurcation theory. Buffoni, Dancer and Toland [1, 2], Buffoni and Toland [3] used the global analytic bifurcation theory to obtain the existence of waves of all amplitudes from zero up to that of Stokes’ highest wave. Besides, Amick [15] also proved that for any irrotational wave the angle of inclination (with respect to the horizontal) of the profile must be less than 31.15∘.
In recent years, the classical hydrodynamic problem concerning two-dimensional steady periodic travelling water waves with vorticity has attracted considerable interests, starting with the study of Constantin and Strauss[5] for periodic waves of finite depth. In 2004, assuming there is no stagnation points, Constantin and Strauss[5] obtained two-dimensional inviscid periodic traveling waves with vorticity by using bifurcation theory. By local bifurcation theory, Constantin and Vrvruc [7] studied periodic traveling gravity waves with stagnation points at the free surface of water in a flow of constant vorticity over a flat bed. Later, Constantin, Strauss and Vrvruc [6] further extended the result to obtain global bifurcation curve with critical layers via analytic global bifurcation theorem which was obtained by Dancer [9] and improved by Buffoni and Toland [3, Theorem 9.1.1]. Recently, Constantin, Strauss and Vrvruc [18] strictly proved that the downstream waves on a global bifurcation branch are never overhanging and show that the waves approach their maximum possible amplitude. The authors [19] investigated the local behavior of the bifurcation curve at the bifurcation point, determined the linearized stability of the curve when the vorticity is small, and obtained some further qualitative information about the global behavior of the curve. On the other hand, Strauss et al. in [16, 17] established an upper bound of 45∘ on for a large class of waves with favorable and small adverse vorticity.
Note that Constantin and Strauss [5] obtain a global connected set of water waves of large amplitude without stagnation points. However, the global structure and some geometric properties of this set are not very clear. The main aim of this paper is to study global structure and some geometric properties of the connected set obtained in [5]. In Section 2, we recall the governing equations for two-dimensional steady periodic water waves in different formulations and state our main results. The Section 3 is devoted to obtaining two global bifurcation solution curves and analysing its structure. In Section 4, we mainly obtain some geometric properties of water waves to finish the proof of main theorem.
2. Preliminaries and main results
We recall the governing equations for the propagation of two-dimensional gravity water waves. Choosing coordinates so that the horizontal -axis is in the direction of wave propagation, the -axis points vertically upwards, and the origin lies at the mean water level. In its undisturbed state the equation of the flat surface is , and the flat bottom is given by for some . In the presence of waves, let be the free surface and let be the velocity field. Then the problem of traveling gravity water waves in can be formulated as
| (2.1) |
where denotes the pressure, is the gravitational constant of acceleration and being the constant atmospheric pressure.
Given , we are looking for periodic waves traveling at speed . So, the space-time dependence of the free surface, of the pressure, and of the velocity field has the form . Define the stream function by , . Then where is the vorticity function. The relative mass flux is defined by
which is a negative constant if . From now on we always assume there is no stagnation points throughout the fluid, that is to say . Let
have minimum value for .
Define as the closure of the open fluid domain
and let
For an integer and , a domain is a domain if each point of its boundary has a neighborhood in which is the graph of a function with Hölder-continuous derivatives (of exponent ) up to order . Given a domain , define the space of functions with Hölder-continuous derivatives (of exponent ) up to order and satisfying an -periodicity condition in the -variable. We use a similar notation for the case and for Hölder spaces of functions of one variable.
From Bernoulli’s law, we know that
is a constant along each streamline. Therefore, the dynamic boundary condition is equivalent to
where is a constant. According to [4] and [5], then the problem (2.1) can be reformulated as
| (2.2) |
where the constant is the total head. Under the assumption , let , and (see [5]), then problem (2.2) is equivalent to
| (2.3) |
with even and of period in the -variable.
From [5, Lemma 3.2] we know that problem (2.3) has the trivial solution
for with
And the linearized problem of (2.3) at is
| (2.4) |
with even and -periodic in . From [5, Lemma 3.3], there exists and a solution of (2.4) that is even and -periodic in .
Let be the rectangle , be the top and the bottom of its closure . Let
where the subscript ”per” means -periodic and even in . For any , set
Define
with
and
Thus we have that
where
Constantin and Strass [5] established the following milestone result.
Theorem A. Let the wave speed , the wavelength ,
and the relative mass flux be given. For a constant , let the
vorticity function be such that
Consider traveling solutions of speed c and relative mass flux of the water wave problem (2.1) with vorticity function such that throughout the fluid. There exists a connected set of solutions in the space with the following proper
-
•
contains a trivial laminar flow;
-
•
there is a sequence for which .
Furthermore, each nontrivial solution satisfies the following:
(i) , and have period in ;
(ii) within each period the wave profile has a single maximum and a single minimum; say the maximum occurs at ;
(iii) and are symmetric while is antisymmetric around the line ;
(iv) a water particle located at with and has positive vertical velocity ;
(v) on .
Here we further improve Theorem A by showing the following theorem.
Theorem 2.1. Under the assumptions of Theorem A, there exist two continuous curves and of solutions in the space with the following properties
-
•
() contains the trivial laminar flow if and only if for some positive ;
-
•
there is a sequence for which .
Furthermore, each nontrivial solution satisfies the properties (i)-(v) described in Theorem A. In addition, there also holds:
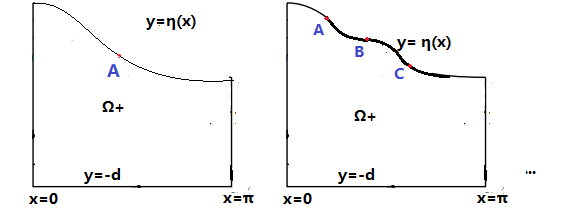
(vi) there is at least one inflection point on the free surface for , and the free surface is strictly concave at any crest and strictly convex at any trough (see Figure 1);
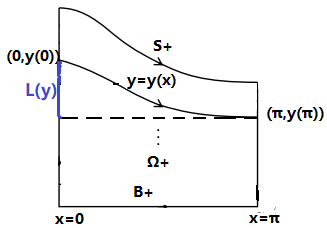
(vii) For favorable vorticity (i.e ), the vertical displacement of water waves on any streamline decreases with depth (see Figure 2).
Compared with Theorem A, we obtain two continuous curves which meet the laminar flow only one time. Note that A. Constantin [4, Theorem 3.5] also obtained a continuous curve , which may form a closed loop. Here does not form a closed loop. Besides, we also obtain new geometric properties and of the solution sets.
3. The global bifurcation structure
To prove Theorem 2.1, we first improve the analytic global bifurcation theorem of Buffoni
and Toland [3, Theorem 9.1.1] as follows.
Theorem 3.1. Let and be Banach spaces, be
an open subset of and be a real-analytic function. Suppose that
(H1) for all ;
(H2) for some , and are -dimensional, with the null space generated by , and the transversality condition
holds, where and denote null space and range space of , respectively;
(H3) is a Fredholm operator of index zero for any such that ;
(H4) all bounded closed subsets of are compact in .
Then there exist in two continuous curve () of solutions to such that:
(C1) ;
(C2) in , as ;
(C3) there exist a neighbourhood of and sufficiently small such that
(C4) has a real-analytic reparametrization locally around each of its points;
(C5) one of the following alternatives occurs:
(1) in as ;
(2) approaches as ;
(3) contains a trivial point with .
Moreover, such a curve of solutions to having the properties (C1)–(C5)
is unique (up to reparametrization).
In [3, Theorem 9.1.1] or [6, Theorem 6], may form a closed loop, that is, there exists such that for all .
Here we further show that contains another bifurcation point if a closed loop occurs, which is coincident with the Rabinowitz Global Bifurcation Theorem [13].
Proof of Theorem 3.1. A distinguished arc is a maximal connected subset of . Let denote the first distinguished arc of which bifurcates from . Here we only show the case of for simplicity. Suppose by contradiction that
forms a closed loop and does not contain another bifurcation point. From [3, Theorem 9.1.1] there exists some constant such that
. So there is a segment of , parameterized by sufficiently
close to , which is a subset of .
Since , there exist positive sequences and with and such that
By [3, Theorem 9.1.1] is an integer multiple of .
That is to say there exists a such that
for all . It follows that . Thus, for all , which is a contradiction.∎
Applying Theorem 3.1 to on , we obtain the following theorem.
Theorem 3.2. There exist two continuous curve () of solutions to . Either
(i) is unbounded in , or
(ii) contains a point .
Moreover, where
and .
Proof of Theorem 3.2. From [5, Lemma 3.7, 3.8 and Theorem 3.1] we have that satisfies (H2) in Theorem 3.1.
By [5, Lemma 4.1 and 4.3], satisfies (H2)-(H3) in Theorem 3.1.
So, by Theorem 3.1, there exist two continuous curve () of solutions to such that
(C1) ;
(C2) in , as , where with ;
(C3) there exist a neighbourhood of and sufficiently small such that
(C4) has a real-analytic reparametrization locally around each of its points;
(C5) one of the following alternatives occurs:
(1) in as ;
(2) approaches as ;
(3) contains a trivial point with .
By [5, Lemmatas 5.1–5.3] the alternative (3) is impossible.
So is unbounded or reach to the boundary of .
∎
The conclusions of Theorem 3.2 are better than the corresponding ones of [5, Theorem 5.4] or [4, Theorem 3.5].
Moreover, the argument here is more concise. Let .
From [5, Section 7], there exists a sequence
such that , where
is the solution of the water wave problem (2.1) corresponding to .
Hence, from the definition of we see that as .
It follows that as .
Therefore, is unbounded in the direction of .
Nodal pattern of solutions on : By the definition of , increase as decreases.
So, and it is closed and continuous, which corresponds a solution set of problem (2.3).
It is enough to show that .
To do it, we study the nodal pattern of solutions on .
We only show the case of for simplicity.
If is the open rectangle , we denote its sides by
We consider the following properties of
| (3.1) |
| (3.2) |
| (3.3) |
By [5, Lemma 5.1] properties (3.1)–(3.3) hold in a small neighborhood of in along the bifurcation curve .
Since on and , we have that . So the condition (5.14) of Serrin’s Maximum Principle [5] is still valid for with . Thus, as that of [5, Lemma 5.2], the nodal properties (3.1)–(3.3) hold along unless there exists such that .
We claim that meets another bifurcation point is impossible. If , there is a sequence of solutions with such that in . Clearly, we have that
for any , where . It follows that
for large enough. Differentiating we have that
So, the linear operators are uniformly elliptic (uniformly in and ) because
Differentiating we have that
From the definition of with we get that
It follows that
for large enough. Thus, the linear boundary operators are uniformly oblique. Then as that of [5, Lemma 5.3] we deduce that .∎
4. The geometric properties
In this section, we aim to finish the proof of Theorem 2.1 by establishing the geometric properties and .
The proof of Theorem 2.1. Suppose for seeking contradiction of that there is no inflection point on for . Then the free surface must be strictly convex (or concave) for . Without loss of generality, we assume that it’s strictly convex, i.e
| (4.1) |
Due to the symmetry and periodic properties of in Theorem A, we have that
| (4.2) |
Based on the mass conservation in (2.1), we obtain that
| (4.3) |
Besides, the fact indicates that
| (4.4) |
the last inequality follows from property in Theorem A. Combining (4.1) with (4.4), we get that
which means that
| (4.5) |
From boundary condition in (2.1), (4.4), (4.5) and the property in Theorem A, we have
which implies
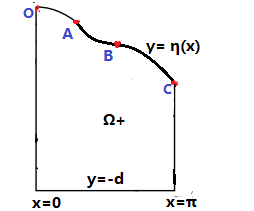
This means decreases strictly along surface from wave crest to trough , which is contradicted with (4.2). Indeed, the number of inflection points on surface must be odd from wave crest to trough due to the fact (4.2) and vertical velocity would decrease along the surface if the free surface is convex, otherwise would increase. For instance, if there are two inflection points on surface from wave crest to trough (see Figure 3), then , is a contradiction.
By the way, considering the stability of wave profile, we conjecture that there should be one inflection point on surface from wave crest to trough . In fact, this is also open problem for Stokes wave. As Constantin [4, Section 4.4] mentioned that ”The qualitative description of the flow beneath a smooth Stokes wave with no underlying current is almost complete. The only missing major aspect (other than understanding the wave of greatest height) is the behavior of the vertical velocity component : we know how its sign depends on the location within the fluid domain, but how about its monotonicity? One would conjecture that along each streamline, between crest and trough, first increases with positive values away from the crest line and then decreases toward zero beneath the wave trough.”, which means it was conjectured that for Stokes wave there should be one inflection point on surface from wave crest to trough . Here we only answer the question partially but our proof holds for any vorticity.
Now it remains to prove the property in Theorem 2.1. Base on the result of Lemma 5.2 of Basu [20], we can state that for , the horizontal fluid velocity is a strictly decreasing function of along any streamline in . (Note that the definition of vorticity function differs by a minus sign in this paper.) That is to say,
| (4.6) |
In addition, ( is a constant) due to is a streamline. We have , hence
| (4.7) |
Thus, (4.6), (4.7) and the assumption imply that
| (4.8) |
Define the vertical displacement of water waves on streamline by
| (4.9) |
| (4.10) |
Up to now, we finish the proof of Theorem 2.1. ∎
References
- 1. B. Buffoni, E.N. Dancer and J.F. Toland, The regularity and local bifurcation of steady periodic water waves, Arch. Rational. Mech. Anal. 152, 207–240 (2000)
- 2. B. Buffoni, E.N. Dancer and J.F. Toland, The sub-harmonic bifurcation of Stokes waves, Arch. Rational. Mech. Anal. 152, 241–271 (2000)
- 3. B. Buffoni and J.F. Toland, Analytic Theory of Global Bifurcation. Princeton University Press, Princeton, 2003.
- 4. A. Constantin, Nonlinear water waves with applications to wave-current interactions and tsunamis, CBMS-NSF Regional Conference Series in Applied Mathematics, 81. SIAM, Philadelphia, PA, 2011.
- 5. A. Constantin and W. Strauss, Exact steady periodic water waves with vorticity, Comm. Pure Appl. Math. 57 (2004), 481–527.
- 6. A. Constantin, W. Strauss and E. Vrvruc, Global bifurcation of steady gravity water waves with critical layers, Acta Math. 217 (2016), 195–262.
- 7. A. Constantin and E. Vrvruc, Steady periodic water waves with constant vorticity: regularity and local bifurcation, Arch. Ration. Mech. Anal., 199 (2011), 33–67.
- 8. Crandall M.G. and Rabinowitz P.H.: Bifurcation from simple eigenvalues. J. Funct. Anal. 8, 321–340 (1971).
- 9. E.N. Dancer, Bifurcation theory for analytic operators, Proc. London Math. Soc., 26 (1973), 359–384.
- 10. G. Keady and J. Norbury, On the existence theory for irrotational water waves, Math. Proc. Cambridge Philos. Soc. 83 (1978), no. 1, 137–157.
- 11. J.P. Krasovskii, On the theory of steady-state waves of finite amplitude, Z. Vycisl. Mat. i Mat. Fiz. 1 (1961), 836–855. Translation in U.S.S.R. Comput. Math. and Math. Phys. 1 (1961), 996–1018.
- 12. A.I. Nekrasov, On steady waves, Izv. Ivanovo-Voznesenk. Politekhn. 3, 1921.
- 13. P.H. Rabinowitz, Some global results for nonlinear eigenvalue problems, J. Funct. Anal. 7 (1971), 487–513.
- 14. G.G. Stokes, On the theory of oscillatory waves, Trans. Camb. Philos. Soc. 8 (1847), 441–473.
- 15. C.J. Amick, Bounds for water waves, Arch. Ration. Mech. Anal. 99 (1987), 91–114.
- 16. W.A. Strauss and M.H. Wheeler, Bound on the slope of steady water waves with favorable vorticity, Arch. Ration. Mech. Anal. 222 (2016), 1555-1580.
- 17. S.W. So and W.A. Strauss, Upper bound on the slope of steady water waves with small adverse vorticity, J. Differential Equations 264 (2018), 4136-4151.
- 18. A. Constantin, W. Strauss and E. Vrvruc, Large-amplitude steady downstream water waves, Commun. Math. Phys. 387 (2021) 237–266.
- 19. G.W. Dai, F.Q. Li and Y. Zhang, Bifurcation structure and stability of steady gravity water waves with constant vorticity.
- 20. B. Basu, On some properties of velocity field for two dimensional rotational steady water waves, Nonlinear Anal. 184 (2019) 17–34.