Goal-Conditioned Predictive Coding for Offline Reinforcement Learning
Abstract
Recent work has demonstrated the effectiveness of formulating decision making as supervised learning on offline-collected trajectories. Powerful sequence models, such as GPT or BERT, are often employed to encode the trajectories. However, the benefits of performing sequence modeling on trajectory data remain unclear. In this work, we investigate whether sequence modeling has the ability to condense trajectories into useful representations that enhance policy learning. We adopt a two-stage framework that first leverages sequence models to encode trajectory-level representations, and then learns a goal-conditioned policy employing the encoded representations as its input. This formulation allows us to consider many existing supervised offline RL methods as specific instances of our framework. Within this framework, we introduce Goal-Conditioned Predictive Coding (GCPC), a sequence modeling objective that yields powerful trajectory representations and leads to performant policies. Through extensive empirical evaluations on AntMaze, FrankaKitchen and Locomotion environments, we observe that sequence modeling can have a significant impact on challenging decision making tasks. Furthermore, we demonstrate that GCPC learns a goal-conditioned latent representation encoding the future trajectory, which enables competitive performance on all three benchmarks. Our code is available at https://brown-palm.github.io/GCPC/.
1 Introduction
Goal-conditioned imitation learning [13, 15, 20] has recently emerged as a promising approach to solve offline reinforcement learning problems. Instead of relying on value-based methods, they directly learn a policy that maps states and goals (e.g. expected returns, or target states) to the actions. This is achieved by supervised learning on offline collected trajectories (i.e. sequences of state, action, and reward triplets). This learning paradigm enables the resulting framework to avoid bootstrapping for reward propagation, a member of the “Deadly Triad” [45] of RL which is known to lead to unstable optimization when combining with function approximation and off-policy learning, and also allows the model to leverage large amounts of collected trajectories and demonstrations. The emergence of RL as supervised learning on trajectory data coincides with the recent success of the Transformer architecture [46, 20] and its applications to sequence modeling, such as GPT [8] for natural language and VPT [3] for videos. Indeed, several recent works have demonstrated the effectiveness of sequence modeling for offline RL [10, 27, 34, 44, 49, 9, 42]. Most of these approaches apply the Transformer architecture to jointly learn the trajectory representation and the policy. When the sequence models are unrolled into the future, they can also serve as “world models” [21, 22] for many RL applications. By leveraging advanced sequence modeling objectives from language and visual domains [11, 4, 24], such methods have shown competitive performance in various challenging tasks [16, 5].
Despite the enthusiasm and progress, the necessity of sequence modeling for offline reinforcement learning has been questioned by recent work [15]: With a simple but properly tuned neural architecture (e.g. a multilayer perceptron), the trained agents can achieve competitive performance on several challenging tasks while taking only the current state and the overall goal as model inputs. In some tasks, these agents even significantly outperform their counterparts based on sequence modeling. These observations naturally motivate the question: Is explicit sequence modeling of trajectory data necessary for offline RL? And if so, how should it be performed and utilized?
To properly study the impact of sequence modeling for decision making, we propose to decouple trajectory representation learning and policy learning. We adopt a two-stage framework, where sequence modeling can be applied to learn the trajectory representation, the policy, or both. The connection between the two stages can be established by leveraging encoded trajectory representations for policy learning, or by transferring the model architecture and weights (i.e. the policy can be initialized with the same pre-trained model used for trajectory representation learning). These stages can be trained separately, or jointly and end-to-end. This design not only facilitates analyzing the impacts of sequence modeling, but is also general such that prior methods can be considered as specific instances, including those that perform joint policy learning and trajectory representation learning [10, 34, 49], and those that learn a policy directly without sequence modeling [15].
Concretely, we aim at investigating the following questions: (1) Are offline trajectories helpful due to sequence modeling, or simply by providing more data for supervised policy learning? (2) What would be the most effective trajectory representation learning objectives to support policy learning? Should the sequence models learn to encode history experiences [10], future dynamics [27], or both [19]? (3) As the same sequence modeling framework may be employed for both trajectory representation learning and policy learning [34, 9, 49], should they share the same training objectives or not?
We design and conduct experiments on the AntMaze, FrankaKitchen, and Locomotion environments to answer these questions. We observe that sequence modeling, if properly designed, can effectively aid decision-making when its resulting trajectory representation is used as an input for policy learning. We also find that there is a discrepancy between the optimal self-supervised objective for trajectory representation learning, and that for policy learning. These observations motivate us to propose a specific design of the two-stage framework: It compresses trajectory information into compact bottlenecks via sequence modeling pre-training. The condensed representation is then used for policy learning with a simple MLP-based policy network. We observe that goal-conditioned predictive coding (GCPC) is the most effective trajectory representation learning objective. It enables competitive performance across all benchmarks, particularly for long-horizon tasks. We attribute the strong empirical performance of GCPC to the acquisition of goal-conditioned latent representations about the future, which provide crucial guidance for decision making.
To summarize, our main contributions include:
-
•
We propose to decouple sequence modeling for decision making into a two-stage framework, namely trajectory representation learning and policy learning. It provides a unified view for several recent reinforcement learning via supervised learning methods.
-
•
We conduct a principled empirical exploration with our framework to understand if and when sequence modeling of offline trajectory data benefits policy learning.
-
•
We discover that goal-conditioned predictive coding (GCPC) serves as the most effective sequence modeling objective to support policy learning. Our overall framework achieves competitive performance on AntMaze, FrankaKitchen and Gym Locomotion benchmarks.
2 Related Work
What is essential for Offline RL? Offline reinforcement learning aims to obtain effective policies by leveraging previously collected datasets. Prior work usually adopts dynamic programming [31, 29, 18] or supervised behavioral cloning (BC) methods [43, 3]. Recent approaches [10, 27] demonstrate the effectiveness of solving decision making tasks with sequence modeling, whereas RvS [15] establishes a strong MLP baseline for conditional behavioral cloning. To further understand what are the essential components for policy learning, researchers have investigated the assumptions required to guarantee the optimality of return-conditioned supervised learning [7], and examined offline RL agents from three fundamental aspects: representations, value functions, and policies [17]. Another concurrent work [6] compares the preferred conditions (e.g. data, task, and environments) to perform Q-learning and imitation learning. In our work, we seek to understand how sequence modeling may benefit offline RL and study the impacts of different sequence modeling objectives.
Transformer for sequential decision-making. Sequential decision making has been the subject of extensive research over the years. The tremendous success of the Transformer model for natural language processing [11, 40] and computer vision [24, 35] has inspired numerous works that seek to apply such architectures for decision making, and similarly motivates our work. Prior work has shown how to model sequential decision making as autoregressive sequence generation problem to produce a desired trajectory [10], while others have explored the applications of Transformer for model-based RL [27, 47] and multi-task learning [41, 9]. Our work aims to utilize Transformer-based models to learn good trajectory representations that can benefit policy learning.
Masked Autoencoding. Recent work in NLP and CV has demonstrated masked autoencoding (MAE) as an effective task for self-supervised representation learning [11, 8, 4, 24]. Inspired by this, Uni[MASK] [9], MaskDP [34], and MTM [49] propose to train unified masked autoencoders on trajectory data by randomly masking the states and actions to be reconstructed. These models can be directly used to solve a range of decision making tasks (e.g. return-conditioned BC, forward dynamics, inverse dynamics, etc.) by varying the masking patterns at inference time, without relying on task-specific fine-tuning. In contrast, we decouple trajectory representation learning and policy learning into two stages. Unlike approaches which perform value-based offline RL (e.g. TD3, Actor-Critic) after pretraining [34, 49], our policy learning stage adopts imitation learning setup where the policy can be learned without maximizing cumulative reward.
Self-supervised Learning for RL. Self-supervised learning has emerged as a powerful approach for learning useful representations in various domains, including reinforcement learning (RL). In RL, self-supervised learning techniques aim to leverage unlabeled or partially observed data to pre-train agents or learn representations that facilitate downstream RL tasks. Prior work mainly focuses on using self-supervised learning to get state representations [51, 38, 36, 50, 10, 34, 9, 49, 32] or world models [22, 23, 44, 27, 12, 37]. In [51], the authors evaluate a broad set of state representation learning objectives on offline datasets and demonstrate the effectiveness of contrastive self-prediction. In this work, we investigate representation learning objectives in trajectory-space with the sequence modeling tool, which enables us to explore the impact of different modalities (e.g. states, actions, goals, etc.) on trajectory representation learning.
3 Method
We revisit the role of sequence modeling in offline reinforcement learning, from the perspectives of trajectory representation learning and policy learning. Section 3.1 describes the background knowledge on extracting policies from offline trajectories using supervised learning. Section 3.2 introduces a two-stage framework that decouples trajectory representation learning and policy learning, which serves as the basis for our investigation. In Section 3.3, we propose a specific instantiation of the two-stage framework, in which we leverage a self-supervised learning objective – Goal-Conditioned Predictive Coding (GCPC), to acquire performant trajectory representations for policy learning.
3.1 Offline Reinforcement Learning via Supervised Learning
We follow prior work that leverages sequence modeling for offline reinforcement learning, and adopt the Reinforcement learning via Supervised learning (RvS) (e.g. [15]) setting. RvS aims to solve the offline RL problem as conditional, filtered, or weighted imitation learning. It assumes that a dataset has been collected offline, but the policies used to collect the dataset may be unknown, such as with human experts or a random policy. The dataset contains a set of trajectories: . Each trajectory in the dataset is represented as , where is the length of the trajectory, and , refer to the state, action at timestep , respectively. A trajectory may optionally contain the reward received at timestep .
As the trajectories are collected with unknown policies, they may not be optimal or have expert-level performance. Prior work [10, 33, 30] has shown that properly utilizing offline trajectories containing suboptimal data might produce better policies. Intuitively, the suboptimal trajectories may still contain sub-trajectories that demonstrate useful “skills”, which can be composed to solve new tasks.
Given the above trajectories, we denote a goal-conditioned policy as a function parameterized by that maps an observed trajectory and a goal to an action . The goal is computed from , which can be represented as either a target state configuration sampled from or an expected cumulative reward/return-to-go computed from (see Appendix A.6 for details). For simplicity of notation, we write as and as . We consider a policy should be able to take any form of state or trajectory information as input and predict the next action: (1) when only the current observed state and the goal are used, the policy ignores the history observations; (2) when is a sequence model, it can employ the whole observed trajectory to predict the next action . To optimize the policy, a commonly used objective is to find the parameters that fit the mapping of observations to actions using maximum likelihood estimation:
| (1) |
3.2 Decoupled Trajectory Representation and Policy Learning
Sequence modeling can be used for decision making from two perspectives, namely trajectory representation learning and policy learning. The former aims to acquire useful representations from raw trajectory inputs, often in the form of a condensed latent representation, or the pretrained network weights themselves. The latter aims to map the observations and the goal into actions that accomplish the task. To explicitly express the trajectory representation function, we rewrite the goal-conditioned policy function as follows:
| (2) |
where is an arbitrary function, such as a neural network, that computes representation from . can also be an identity mapping such that directly operates on .
Motivated by the recent success of sequence modeling in NLP [11, 40] and CV [24, 14], both the trajectory learning function and the policy learning function can be implemented with Transformer neural networks as and . We hypothesize that it is beneficial for to condense the trajectories into a compact representation using sequence modeling techniques. We also hypothesize that it is desirable to decouple the trajectory representation learning from policy learning. The decoupling not only offers flexibility on the choice of representation learning objectives, but also allows us to study the impact of sequence modeling for trajectory representation learning and policy learning independently. We thus adopt a two-stage framework with a TrajNet and a PolicyNet . TrajNet aims to learn trajectory representations with self-supervised sequence modeling objectives, such as masked autoencoding [24] or next token prediction [40]. PolicyNet aims to obtain a performant policy with the supervised learning objective in Equation 1.
We now describe an overall flow of the two networks, which we will show is general to represent recently proposed methods. In the first stage, we approach trajectory representation learning as masked autoencoding. TrajNet receives a trajectory and an optional goal , and is trained to reconstruct from a masked view of the same. Optionally, TrajNet also generates a condensed trajectory representation , which can be utilized by PolicyNet for subsequent policy learning:
| (3) |
During the second stage, TrajNet is applied on the unmasked observed trajectory – , to obtain . PolicyNet then predicts the action given (or the current observed state ), the goal , and trajectory representation :
| (4) |
Our framework provides a unified view to compare different design choices (e.g. input information, architecture, training objectives, etc.) for representation learning and policy learning, respectively. Many existing methods can be seen as special cases of our framework. For example, prior works [34, 49] instantiate TrajNet with a bi-directional Transformer pre-trained via masked prediction, and re-use it as the PolicyNet in a zero-shot manner. To implement DT [10], is set as an identity mapping function of the input trajectory and is trained to autoregressively generate actions. These methods learn trajectory representations and the policy jointly, with training objectives inspired by MAE [24] and GPT [40]. At last, our framework recovers RvS-G/R [15] by having the output of in Eq. 2 as the last observed state from .
3.3 Goal-Conditioned Predictive Coding
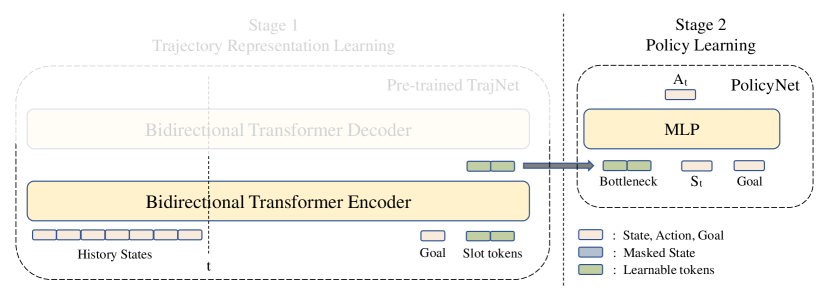
Finally, we introduce a specific design of the two-stage framework, Goal-Conditioned Predictive Coding (GCPC), which is inspired by our hypotheses introduced in Section 3.2. To facilitate the transfer of trajectory representations between the two stages, we compress the trajectory into latent representations using sequence modeling, which we refer to as the bottleneck. With this design, we train the bottleneck to perform goal-conditioned future prediction, so that the latent representations encode future behaviors toward the desired goal, which are subsequently used to guide policy learning.
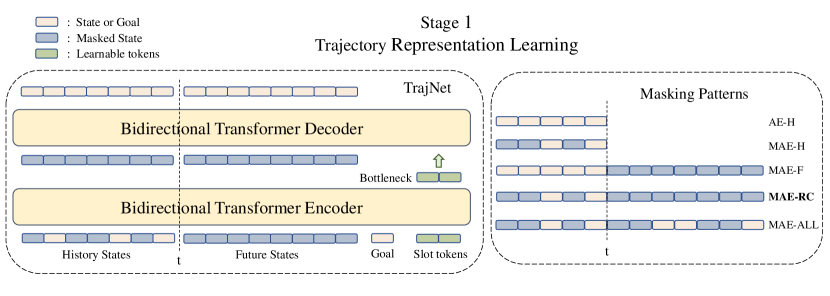
In the first stage (as shown in Figure 1), we use a bi-directional Transformer as TrajNet. The inputs include state tokens, one goal token, and a few learnable slot tokens. The action tokens are ignored. We first embed the goal token and all state tokens with separate linear encoders, then apply sinusoidal positional encoding before all inputs are sent into the Transformer Encoder.
While the full trajectories can be used for trajectory representation learning with TrajNet, only observed states are available during policy learning. For notation consistency, we denote the observed states as “history”, and the states that follow the observed states as “future”. The total number of input states for stage 1 is , and for stage 2 is . Both and are hyperparameters that represent history window length and future window length, respectively.
To perform goal-conditioned predictive coding, the entire future trajectory is masked. The tokens in the observed history are randomly masked (Figure 1 “MAE-RC”). The bottleneck is taken as the encoded slot tokens, which condenses the masked input trajectory into a compact representation. The decoder takes the bottleneck and masked tokens as the input, and aims to reconstruct both the history and the future states. Our intuition is that this will encourage the bottleneck to learn representations encoding the future trajectory and provide useful signals for decision making. The training objective of the TrajNet is to minimize MSE loss between the reconstructed and the ground-truth trajectory.
Figure 2 illustrates the interface between the TrajNet and the PolicyNet. PolicyNet is implemented as a simple MLP network. The trained TrajNet has its weights frozen, and only the TrajNet encoder is used to compute the trajectory representation from unmasked history states. PolicyNet takes the current state , goal , and bottleneck as input, and outputs an action. The training objective of PolicyNet is to minimize MSE loss between the predicted and ground-truth actions.
Discussion. Decoupling trajectory representation learning and policy learning allows us to explore different model’s inputs and sequence modeling objectives. For example, recent work [2, 39] observed that the action sequences could potentially be detrimental to the learned policy in some tasks. In GCPC, we employ state-only trajectories as input and ignore the actions. Different objectives (e.g. masking patterns in the masked autoencoding objective) also have an impact on what is encoded in the bottleneck. Here we introduce five sequence modeling objectives for trajectory representation learning (as shown in Table 1) and study their impacts on policy learning. When using “AE-H” or “MAE-H”, the bottleneck is only motivated to summarize the history states. When using “MAE-F” or “MAE-RC”, the bottleneck is asked to perform predictive coding, and thus encode the future state sequences to achieve the provided goal. By default, we adopt the “MAE-RC” objective in GCPC.
| Input | Reconstruct | |||
|---|---|---|---|---|
| History | Future | History | Future | |
| AE-H | Unmasked | – | ||
| MAE-H | Randomly Masked | – | ||
| MAE-F | Unmasked | Fully Masked | ||
| MAE-RC | Randomly Masked | Fully Masked | ||
| MAE-ALL | Randomly Masked | Randomly Masked | ||
4 Experiments
In this section, we aim to answer the following questions with empirical experiments: (1) Does sequence modeling benefit reinforcement learning via supervised learning on trajectory data, and how? (2) Is it beneficial to decouple trajectory representation learning and policy learning with bottlenecks? (3) What are the most effective trajectory representation learning objectives?

4.1 Experimental Setup
To answer the questions above, we conduct extensive experiments on three domains from D4RL offline benchmark suite [16]: AntMaze, FrankaKitchen and Gym Locomotion. AntMaze is a class of long-horizon navigation tasks, featuring partial observability, sparse reward and datasets that consist primarily of suboptimal trajectories. In this domain, an 8-DoF Ant robot needs to “stitch” parts of subtrajectories and navigates to a particular goal location in partially observed mazes. In addition to three mazes from the original D4RL, we also include a larger maze (AntMaze-Ultra) proposed by [28]. Both large and ultra setup in AntMaze poses significant challenges due to the complex maze layout and long navigation horizon. FrankaKitchen is a long-horizon manipulation task, in which a 9-DoF Franka robot arm is required to perform 4 subtasks in a simulated kitchen environment (e.g. open the microwave, turn on the light). In Gym Locomotion, we evaluate our approach on three continuous control tasks: Walker 2D, Hopper and Halfcheetah. Following [15], we refer to the “goal” of AntMaze and Kitchen as the target state configuration, and that of Gym as the average return-to-go.
Experimental details. For all benchmarks, we use a two-layer transformer encoder and a one-layer transformer decoder as the TrajNet, and a two-layer MLP as the PolicyNet (see detailed hyperparamters in A.3). During policy learning, we use the pre-trained TrajNet that achieves the lowest validation reconstruction loss to generate the bottleneck. For each evaluation run, we follow [29] to take the success rate over 100 evaluation trajectories for AntMaze tasks. For Kitchen and Gym Locomotion, we average returns over 50 and 10 evaluation trajectories, respectively. To determine the performance with a given random seed, we take the best evaluation result among the last five checkpoints (see discussion in A.2). For performance aggregation, we report the mean performance and standard deviation averaged over five seeds for each experiment.
4.2 Impact of Trajectory Representation Pretraining Objectives
In the two-stage framework, the pre-trained TrajNet generates trajectory representations in the form of the bottleneck, which is taken as an input to PolicyNet. To study the impact of trajectory representation learning objectives on the resulting policy performance, we implement five different sequence modeling objectives (as in Table 1) by varying masking patterns in the first stage pretraining.
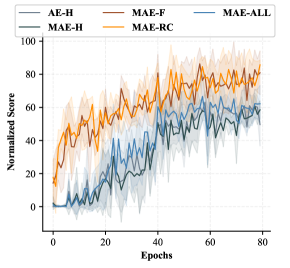
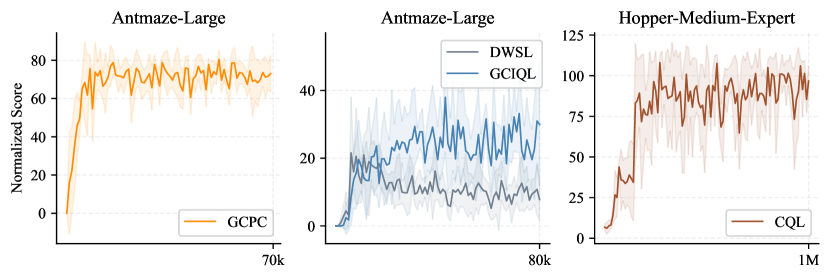
Table 2 compares the performance of policies with different settings and pretraining objectives111For pre-training on AntMaze, when actions (i.e. the torque applied on joints) are considered, the full state space is reconstructed; when state-only trajectories are used, we reconstruct only the locations of the agent.. We note that MAE-F is the only effective masking pattern to perform zero-shot inference. After decoupling representation learning and policy learning, the MLP policy consistently outperforms the zero-shot transformer policy. This suggests good objectives for two stages could be different – by decoupling we can get the best of both worlds. Also, we observe that removing action sequences from trajectory representation pretraining yields performance gains in this task, whereas previous single-stage Transformer policy (e.g. [10]) usually requires action inputs to function, which further demonstrates the flexibility of our decoupled framework. With properly designed objectives, sequence modeling can generate powerful trajectory representations that facilitate the acquisition of performant policies. In both Table 2 and Figure 4, we observe that both MAE-F and MAE-RC outperform the other objectives in both AntMaze-Large and Kitchen-Partial, confirming the importance of the predictive coding objective for trajectory representation learning.
| Large-Play | AE-H | MAE-H | MAE-F | MAE-RC | MAE-ALL |
|---|---|---|---|---|---|
| Zero-shot | - | 0 | 21.2 17.1 | 0 | 0 |
| Two-stage (w/ actions) | 12.6 4.7 | 6.4 3.8 | 57.2 5.5 | 62.0 10.7 | 11.6 6.3 |
| Two-stage (w/o actions) | 30.2 6.6 | 36.6 12.6 | 76.2 4.0 | 78.2 3.2 | 32.0 13.2 |
4.3 The Role of Goal Conditioning in Trajectory Representation Pretraining
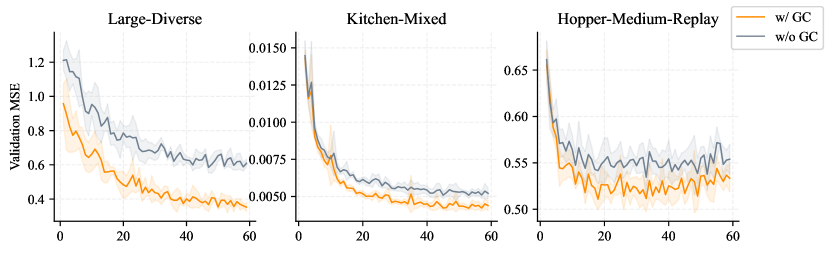
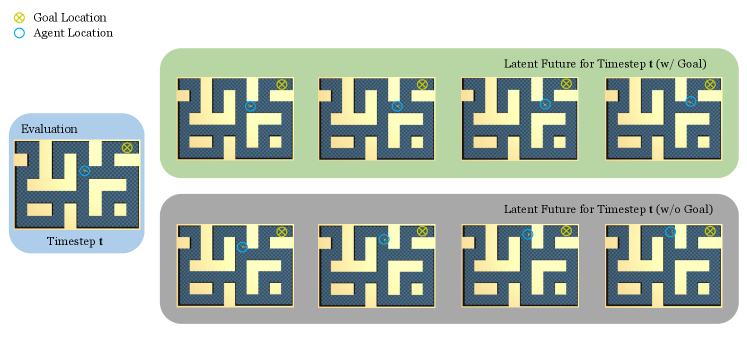
We also investigate whether goal conditioning (i.e. the goal input) in TrajNet is necessary or beneficial for learning trajectory representations. In Table 3, we observe that the objectives without performing future prediction is insensitive to the goal conditioning. For example, the results of AE-H and MAE-H pretraining objectives align with the intuition that merely summarizing the history should not require the goal information. However, goal conditioning is crucial for predictive coding objectives (e.g. MAE-F and MAE-RC). Removing the goal from TrajNet might result in aimless prediction and misleading future representations, which thus harm the policy. Figure 5 shows the curves of validation loss during pretraining with MAE-F objective. We observe that goal conditioning reduces the prediction error and helps the bottleneck properly encode the expected long-term future, which would benefit the subsequent policy learning. One hypothesis is that specifying the goal enables the bottleneck to perform goal-conditioned implicit planning. The planned future may provide the correct waypoints for the agent to reach the distant goal. Figure 6 illustrates a qualitative result of the latent future in AntMaze, which depicts the future states decoded from the bottleneck using the pre-trained Transformer decoder. It demonstrates that the latent future with goal conditioning helps point out the correct direction towards the target location.
| Large-Play | AE-H | MAE-H | MAE-F | MAE-RC | MAE-ALL |
|---|---|---|---|---|---|
| w/o GC | 32.8 4.3 | 33.2 11.9 | 10.0 2.2 | 16.0 5.3 | 36.2 10.4 |
| w/ GC | 30.2 6.6 | 36.6 12.6 | 76.2 4.0 | 78.2 3.2 | 32.0 13.2 |
4.4 Latent Future versus Explicit Future as Policy Conditioning Variables
Prior work [27, 26] has demonstrated that planning into the future is helpful for solving long-horizon tasks. These work performs planning on the explicit future by sampling desirable future states (or transitions), while GCPC leverages goal-conditioned latent representations that encode the future state sequence. In this experiment, we examine how the implicit encoding of future information affects policy performance when it serves as a conditioning variable of PolicyNet. Specifically, we obtain the bottleneck from a TrajNet, which is pre-trained with -length future window. The bottleneck encodes latent representations of future states. Correspondingly, we acquire the same number of explicit future states using the pre-trained transformer decoder (see Appendix A.4). Either the bottleneck or explicit future states are taken as auxiliary inputs to the PolicyNet. In Table 4, we evaluate the policy with in large AntMaze and in Kitchen. The results illustrate that the bottleneck is a powerful future information carrier that effectively improves the policy performance. Different from previous approaches that estimate explicit future states with step-by-step dynamics models [27], using latent future representations can mitigate compounding rollout errors. Compared to diffusion-based planning methods [2], which require iterative refinement to obtain a future sequence, latent future avoids the time-consuming denoising step and reduces the decision latency.
| Large-Play | Large-Diverse | Kitchen-Mixed | Kitchen-Partial | |
|---|---|---|---|---|
| Explicit Future | 67.9 9.3 | 70.0 4.6 | 72.4 4.5 | 73.9 9.3 |
| Latent Future | 78.2 3.2 | 80.6 3.9 | 75.6 0.8 | 90.2 6.6 |
| Dataset | BC | CQL | IQL | DT | TAP | WGCSL | GCIQL | DWSL | RvS-G | GCPC |
|---|---|---|---|---|---|---|---|---|---|---|
| Umaze | 63.4 9.4 | 88.2 2.3 | 92.8 3.4 | 55.6 6.3 | - | 90.8 2.8 | 91.6 4.0 | 71.2 4.2 | 70.4 4.0 | 71.2 1.3 |
| Umaze-Diverse | 63.4 4.4 | 47.4 2.0 | 71.2 7.0 | 53.4 8.6 | - | 55.6 15.7 | 88.8 2.2 | 74.6 2.8 | 66.2 5.6 | 71.2 6.6 |
| Medium-Play | 0.6 0.5 | 72.8 5.7 | 75.8 1.3 | 0 | 78.0 | 63.2 13.7 | 82.6 5.4 | 77.6 3.0 | 71.8 4.7 | 70.8 3.4 |
| Medium-Diverse | 0.4 0.5 | 70.8 10.3 | 76.6 4.2 | 0 | 85.0 | 46.0 12.6 | 76.2 6.3 | 74.8 9.3 | 72.0 3.7 | 72.2 3.4 |
| Large-Play | 0 | 36.4 10.3 | 50.0 9.7 | 0 | 74.0 | 0.6 1.3 | 40.0 16.2 | 15.2 7.7 | 35.6 7.6 | 78.2 3.2 |
| Large-Diverse | 0 | 36.0 8.3 | 52.6 5.9 | 0 | 82.0 | 2.4 4.3 | 29.8 6.8 | 19.0 2.8 | 25.2 4.8 | 80.6 3.9 |
| Ultra-Play | 0 | 18.0 13.3 | 21.2 7.5 | 0 | 22.0 | 0.2 0.4 | 20.6 7.6 | 25.2 3.0 | 25.6 6.7 | 56.6 9.5 |
| Ultra-Diverse | 0 | 9.6 14.6 | 17.8 4.0 | 0 | 26.0 | 0 | 28.4 11.8 | 25.0 8.6 | 26.4 7.7 | 54.6 10.3 |
| Average | 16.0 | 47.4 | 57.3 | 13.6 | - | 32.4 | 57.3 | 47.8 | 49.2 | 69.4 |
4.5 Effectiveness of GCPC
Finally, we show the effectiveness of GCPC by evaluating it on three different domains: AntMaze, Kitchen and Gym Locomotion.
Baselines and prior methods. We compare our approach to both supervised learning methods and value-based RL methods. For the former, we consider: (1) Behavioral Cloning (BC), (2) RvS-R/G [15], a conditional imitation learning method that is conditioned on either a target state or an expected return. (3) Decision Transformer (DT) [10], a return-conditioned model-free method that learns a transformer-based policy, (3) Trajectory Transformer (TT) [27], a model-based method that performs beam search on a transformer-based trajectory model for planning, and (4) Decision Diffuser (DD) [2], a diffusion-based planning method that synthesizes future states with a diffusion model and acts by computing the inverse dynamics. For the latter, we select methods based on dynamic programming, including (5) CQL [31] and (6) IQL [29]. Additionally, we include three goal (state)-conditioned baselines for AntMaze and Kitchen: (7) Goal-conditioned IQL (GCIQL), (8) WGCSL [52] and (9) DWSL [25]. AntMaze-Ultra is a customized environment proposed by [28], therefore we include TAP’s performance on the v0 version of AntMaze for completeness. When feasible, we re-run the baselines with our evaluation protocol for fair comparison [1].
Our empirical results on AntMaze and Kitchen are presented in Table 5 and Table 6. We find our methods outperform all previous methods on the average performance. In particular, on the most challenging large and ultra AntMaze environments, our method achieves significant improvements over the RvS-G baseline, demonstrating the efficacy of learning good future representations using sequence modeling in long-horizon tasks. Table 7 shows the results on Gym Locomotion tasks. Our approach obtains competitive performance as prior methods. We also notice that compared to Decision Transformer, RvS-R can already achieve strong average performance. This suggests that for some tasks sequence modeling may not be a necessary component for policy improvement. With a large fraction of near-optimal trajectories in the dataset, a simple MLP policy may provide enough capacity to handle most of the locomotion tasks.
| Dataset | BC | CQL | IQL | DT | DD | WGCSL | GCIQL | DWSL | RvS-G | GCPC |
|---|---|---|---|---|---|---|---|---|---|---|
| Mixed | 48.9 0.7 | 52.4 | 53.2 1.6 | 50.7 7.1 | 65.0 | 77.8 3.6 | 74.6 1.9 | 74.6 0.6 | 69.4 4.2 | 75.6 0.8 |
| Partial | 41.3 3.7 | 50.1 | 59.7 8.3 | 48.6 9.5 | 57.0 | 75.2 6.4 | 74.7 4.1 | 74.0 5.8 | 71.7 7.9 | 90.2 6.6 |
| Average | 45.1 | 51.3 | 56.5 | 49.7 | 61.0 | 76.5 | 74.7 | 74.3 | 70.6 | 82.9 |
| Dataset | Environment | BC | CQL | IQL | DT | TT | DD | RvS-R | GCPC |
| Medium-Expert | HalfCheetah | 61.9 5.8 | 87.7 7.0 | 92.4 0.4 | 88.8 2.6 | 95 | 90.6 | 93.4 0.3 | 94.0 0.9 |
| Medium-Expert | Hopper | 55.1 2.8 | 110.5 2.9 | 104.2 8.7 | 108.4 2.0 | 110 | 111.8 | 111.3 0.2 | 111.7 0.4 |
| Medium-Expert | Walker2d | 100.4 13.4 | 110.4 0.6 | 110.2 0.7 | 108.6 0.3 | 101.9 | 108.8 | 109.6 0.4 | 109.0 0.2 |
| Medium | HalfCheetah | 43.0 0.4 | 47.1 0.3 | 47.7 0.2 | 42.9 0.2 | 46.9 | 49.1 | 44.2 0.2 | 44.5 0.5 |
| Medium | Hopper | 55.8 2.8 | 70.1 1.6 | 69.2 3.2 | 67.8 4.2 | 61.1 | 79.3 | 65.1 5.2 | 68.0 4.4 |
| Medium | Walker2d | 74.1 3.2 | 83.5 0.5 | 84.5 1.5 | 76.5 1.6 | 79 | 82.5 | 78.4 2.6 | 78.0 2.4 |
| Medium-Replay | HalfCheetah | 37.2 1.3 | 45.4 0.3 | 44.9 0.3 | 37.8 0.9 | 41.9 | 39.3 | 40.2 0.2 | 40.7 1.5 |
| Medium-Replay | Hopper | 33.7 8.5 | 96.2 1.9 | 93.9 9.1 | 78.0 11.6 | 91.5 | 100 | 88.5 12.9 | 94.2 3.5 |
| Medium-Replay | Walker2d | 19.2 7.3 | 79.8 1.6 | 78.6 5.7 | 72.5 3.3 | 82.6 | 75 | 71.0 5.1 | 77.6 9.8 |
| Average | 53.4 | 81.2 | 80.6 | 75.7 | 78.9 | 81.8 | 78.0 | 79.7 |
5 Conclusion
In this work, we aim to investigate the role of sequence modeling in learning trajectory representations and its utility in acquiring performant policies. To accomplish this, we employ a two-stage framework that decouples trajectory representation learning and policy learning. This framework unifies many existing RvS methods, enabling us to study the impacts of different trajectory representation learning objectives for sequential decision making. Within this framework, we introduce a specific design – Goal-conditioned Predictive Coding (GCPC), that incorporates a compact bottleneck to transfer representations between the two stages and learns goal-conditioned latent representations modeling the future trajectory. Through extensive experiments, we observe that the bottleneck generated by GCPC properly encodes the goal-conditioned future information and brings significant improvement over some long-horizon tasks. By empirically evaluating our approach on three benchmarks, we demonstrate GCPC achieves competitive performance on a variety of tasks.
Limitations and Future work. GCPC models the future by performing maximum likelihood estimation on offline collected trajectories, which may predict overly optimistic future behaviors and lead to suboptimal actions in stochastic environments. Future work includes discovering policies that are robust to the environment stochasticity by considering multiple possible futures generated by GCPC. Another limitation of our work is that GCPC may not be sufficient to maintain high accuracy for long-term future prediction when high-dimensional states are involved, which may potentially be tackled by leveraging foundation models to acquire representations for high-dimensional inputs.
Acknowledgments and Disclosure of Funding
We appreciate all anonymous reviewers for their constructive feedback. We would like to thank Calvin Luo and Haotian Fu for their discussions and insights, and Tian Yun for the help on this project. This work is in part supported by Adobe, Honda Research Institute, Meta AI, Samsung Advanced Institute of Technology, and a Richard B. Salomon Faculty Research Award for C.S.
References
- [1] Rishabh Agarwal, Max Schwarzer, Pablo Samuel Castro, Aaron C Courville, and Marc Bellemare. Deep reinforcement learning at the edge of the statistical precipice. In Advances in neural information processing systems, 2021.
- [2] Anurag Ajay, Yilun Du, Abhi Gupta, Joshua B. Tenenbaum, Tommi S. Jaakkola, and Pulkit Agrawal. Is conditional generative modeling all you need for decision making? In International Conference on Learning Representations, 2023.
- [3] Bowen Baker, Ilge Akkaya, Peter Zhokov, Joost Huizinga, Jie Tang, Adrien Ecoffet, Brandon Houghton, Raul Sampedro, and Jeff Clune. Video pretraining (vpt): Learning to act by watching unlabeled online videos. In Advances in Neural Information Processing Systems, 2022.
- [4] Hangbo Bao, Li Dong, and Furu Wei. Beit: Bert pre-training of image transformers. In International Conference on Learning Representations, 2022.
- [5] Marc G Bellemare, Yavar Naddaf, Joel Veness, and Michael Bowling. The arcade learning environment: An evaluation platform for general agents. Journal of Artificial Intelligence Research, 2013.
- [6] Prajjwal Bhargava, Rohan Chitnis, Alborz Geramifard, Shagun Sodhani, and Amy Zhang. Sequence modeling is a robust contender for offline reinforcement learning. arXiv preprint arXiv:2305.14550, 2023.
- [7] David Brandfonbrener, Alberto Bietti, Jacob Buckman, Romain Laroche, and Joan Bruna. When does return-conditioned supervised learning work for offline reinforcement learning? In Advances in Neural Information Processing Systems, 2022.
- [8] Tom Brown, Benjamin Mann, Nick Ryder, Melanie Subbiah, Jared D Kaplan, Prafulla Dhariwal, Arvind Neelakantan, Pranav Shyam, Girish Sastry, Amanda Askell, et al. Language models are few-shot learners. In Advances in neural information processing systems, 2020.
- [9] Micah Carroll, Orr Paradise, Jessy Lin, Raluca Georgescu, Mingfei Sun, David Bignell, Stephanie Milani, Katja Hofmann, Matthew Hausknecht, Anca Dragan, and Sam Devlin. Uni[MASK]: Unified inference in sequential decision problems. In Advances in Neural Information Processing Systems, 2022.
- [10] Lili Chen, Kevin Lu, Aravind Rajeswaran, Kimin Lee, Aditya Grover, Michael Laskin, Pieter Abbeel, Aravind Srinivas, and Igor Mordatch. Decision transformer: Reinforcement learning via sequence modeling. arXiv preprint arXiv:2106.01345, 2021.
- [11] Jacob Devlin, Ming-Wei Chang, Kenton Lee, and Kristina Toutanova. Bert: Pre-training of deep bidirectional transformers for language understanding. arXiv preprint arXiv:1810.04805, 2018.
- [12] Yiming Ding, Ignasi Clavera, and Pieter Abbeel. Mutual information maximization for robust plannable representations. arXiv preprint arXiv:2005.08114, 2020.
- [13] Yiming Ding, Carlos Florensa, Pieter Abbeel, and Mariano Phielipp. Goal-conditioned imitation learning. In Advances in neural information processing systems, volume 32, 2019.
- [14] Alexey Dosovitskiy, Lucas Beyer, Alexander Kolesnikov, Dirk Weissenborn, Xiaohua Zhai, Thomas Unterthiner, Mostafa Dehghani, Matthias Minderer, Georg Heigold, Sylvain Gelly, et al. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv preprint arXiv:2010.11929, 2020.
- [15] Scott Emmons, Benjamin Eysenbach, Ilya Kostrikov, and Sergey Levine. Rvs: What is essential for offline RL via supervised learning? In International Conference on Learning Representations, 2022.
- [16] Justin Fu, Aviral Kumar, Ofir Nachum, George Tucker, and Sergey Levine. D4rl: Datasets for deep data-driven reinforcement learning. arXiv preprint arXiv:2004.07219, 2020.
- [17] Yuwei Fu, Di Wu, and Benoit Boulet. A closer look at offline RL agents. In Advances in Neural Information Processing Systems, 2022.
- [18] Scott Fujimoto and Shixiang Gu. A minimalist approach to offline reinforcement learning. In Advances in Neural Information Processing Systems, 2021.
- [19] Hiroki Furuta, Yutaka Matsuo, and Shixiang Shane Gu. Generalized decision transformer for offline hindsight information matching. In International Conference on Learning Representations, 2022.
- [20] Dibya Ghosh, Abhishek Gupta, Ashwin Reddy, Justin Fu, Coline Manon Devin, Benjamin Eysenbach, and Sergey Levine. Learning to reach goals via iterated supervised learning. In International Conference on Learning Representations, 2021.
- [21] David Ha and Jürgen Schmidhuber. World models. arXiv preprint arXiv:1803.10122, 2018.
- [22] Danijar Hafner, Timothy Lillicrap, Mohammad Norouzi, and Jimmy Ba. Mastering atari with discrete world models. arXiv preprint arXiv:2010.02193, 2020.
- [23] Nicklas Hansen, Yixin Lin, Hao Su, Xiaolong Wang, Vikash Kumar, and Aravind Rajeswaran. Modem: Accelerating visual model-based reinforcement learning with demonstrations. arXiv preprint arXiv:2212.05698, 2022.
- [24] Kaiming He, Xinlei Chen, Saining Xie, Yanghao Li, Piotr Dollár, and Ross Girshick. Masked autoencoders are scalable vision learners. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022.
- [25] Joey Hejna, Jensen Gao, and Dorsa Sadigh. Distance weighted supervised learning for offline interaction data. In Proceedings of the 40th International Conference on Machine Learning, 2023.
- [26] Michael Janner, Yilun Du, Joshua Tenenbaum, and Sergey Levine. Planning with diffusion for flexible behavior synthesis. In Proceedings of the 39th International Conference on Machine Learning, 2022.
- [27] Michael Janner, Qiyang Li, and Sergey Levine. Offline reinforcement learning as one big sequence modeling problem. In Advances in Neural Information Processing Systems, 2021.
- [28] Zhengyao jiang, Tianjun Zhang, Michael Janner, Yueying Li, Tim Rocktäschel, Edward Grefenstette, and Yuandong Tian. Efficient planning in a compact latent action space. In International Conference on Learning Representations, 2023.
- [29] Ilya Kostrikov, Ashvin Nair, and Sergey Levine. Offline reinforcement learning with implicit q-learning. arXiv preprint arXiv:2110.06169, 2021.
- [30] Aviral Kumar, Joey Hong, Anikait Singh, and Sergey Levine. Should i run offline reinforcement learning or behavioral cloning? In International Conference on Learning Representations, 2022.
- [31] Aviral Kumar, Aurick Zhou, George Tucker, and Sergey Levine. Conservative q-learning for offline reinforcement learning. In Advances in Neural Information Processing Systems, 2020.
- [32] Michael Laskin, Aravind Srinivas, and Pieter Abbeel. Curl: Contrastive unsupervised representations for reinforcement learning. In International Conference on Machine Learning, pages 5639–5650. PMLR, 2020.
- [33] Kuang-Huei Lee, Ofir Nachum, Sherry Yang, Lisa Lee, C. Daniel Freeman, Sergio Guadarrama, Ian Fischer, Winnie Xu, Eric Jang, Henryk Michalewski, and Igor Mordatch. Multi-game decision transformers. In Advances in Neural Information Processing Systems, 2022.
- [34] Fangchen Liu, Hao Liu, Aditya Grover, and Pieter Abbeel. Masked autoencoding for scalable and generalizable decision making. In Advances in Neural Information Processing Systems, 2022.
- [35] Ze Liu, Yutong Lin, Yue Cao, Han Hu, Yixuan Wei, Zheng Zhang, Stephen Lin, and Baining Guo. Swin transformer: Hierarchical vision transformer using shifted windows. In Proceedings of the IEEE/CVF international conference on computer vision, 2021.
- [36] Suraj Nair, Aravind Rajeswaran, Vikash Kumar, Chelsea Finn, and Abhinav Gupta. R3m: A universal visual representation for robot manipulation. arXiv preprint arXiv:2203.12601, 2022.
- [37] Tung D Nguyen, Rui Shu, Tuan Pham, Hung Bui, and Stefano Ermon. Temporal predictive coding for model-based planning in latent space. In International Conference on Machine Learning, pages 8130–8139. PMLR, 2021.
- [38] Simone Parisi, Aravind Rajeswaran, Senthil Purushwalkam, and Abhinav Gupta. The unsurprising effectiveness of pre-trained vision models for control. In International Conference on Machine Learning, pages 17359–17371. PMLR, 2022.
- [39] Alexander Pashevich, Cordelia Schmid, and Chen Sun. Episodic Transformer for Vision-and-Language Navigation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021.
- [40] Alec Radford, Karthik Narasimhan, Tim Salimans, Ilya Sutskever, et al. Improving language understanding by generative pre-training. 2018.
- [41] Scott Reed, Konrad Zolna, Emilio Parisotto, Sergio Gómez Colmenarejo, Alexander Novikov, Gabriel Barth-maron, Mai Giménez, Yury Sulsky, Jackie Kay, Jost Tobias Springenberg, Tom Eccles, Jake Bruce, Ali Razavi, Ashley Edwards, Nicolas Heess, Yutian Chen, Raia Hadsell, Oriol Vinyals, Mahyar Bordbar, and Nando de Freitas. A generalist agent. Transactions on Machine Learning Research, 2022. Featured Certification.
- [42] Machel Reid, Yutaro Yamada, and Shixiang Shane Gu. Can wikipedia help offline reinforcement learning? arXiv preprint arXiv:2201.12122, 2022.
- [43] Stéphane Ross, Geoffrey Gordon, and Drew Bagnell. A reduction of imitation learning and structured prediction to no-regret online learning. In Proceedings of the fourteenth international conference on artificial intelligence and statistics. JMLR Workshop and Conference Proceedings, 2011.
- [44] Younggyo Seo, Danijar Hafner, Hao Liu, Fangchen Liu, Stephen James, Kimin Lee, and Pieter Abbeel. Masked world models for visual control. In Conference on Robot Learning, pages 1332–1344. PMLR, 2023.
- [45] Richard S Sutton and Andrew G Barto. Reinforcement learning: An introduction. MIT press, 2018.
- [46] Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need. In Advances in neural information processing systems, volume 30, 2017.
- [47] Kerong Wang, Hanye Zhao, Xufang Luo, Kan Ren, Weinan Zhang, and Dongsheng Li. Bootstrapped transformer for offline reinforcement learning. In Advances in Neural Information Processing Systems, 2022.
- [48] Jialong Wu, Haixu Wu, Zihan Qiu, Jianmin Wang, and Mingsheng Long. Supported policy optimization for offline reinforcement learning. In Advances in Neural Information Processing Systems, 2022.
- [49] Philipp Wu, Arjun Majumdar, Kevin Stone, Yixin Lin, Igor Mordatch, Pieter Abbeel, and Aravind Rajeswaran. Masked trajectory models for prediction, representation, and control. In International Conference on Machine Learning, 2023.
- [50] Tete Xiao, Ilija Radosavovic, Trevor Darrell, and Jitendra Malik. Masked visual pre-training for motor control. arXiv preprint arXiv:2203.06173, 2022.
- [51] Mengjiao Yang and Ofir Nachum. Representation matters: offline pretraining for sequential decision making. In International Conference on Machine Learning. PMLR, 2021.
- [52] Rui Yang, Yiming Lu, Wenzhe Li, Hao Sun, Meng Fang, Yali Du, Xiu Li, Lei Han, and Chongjie Zhang. Rethinking goal-conditioned supervised learning and its connection to offline RL. In International Conference on Learning Representations, 2022.
Appendix A Experimental Details
A.1 Additional Baseline Details
We provide additional information on the baseline methods and their performance we present in the main paper. We compare our proposed method with (1) supervised learning methods, including Behavioral Cloning (BC), RvS, Decision Transformer (DT), Trajectory Transformer (TT), and Decision Diffuser (DD). We also compare with (2) value-based methods, including Conservative Q-Learning (CQL) and Implicit Q-Learning (IQL). DT uses a transformer encoder to model offline-RL as an autoregressive sequence generation problem in a model-free way, which predicts future actions based on previous states, actions, and returns-to-go. Similarly, The model-based TT also adopts transformer structure for sequence prediction but uses beam search for planning during execution. Inspired by conditional generative model, DD adopts a diffusion model to sample future state sequence based on returns or constraints and extract actions between the states by using a inverse dynamics model with relyng on value estimation. Similar to our PolicyNet, RvS-G and RvS-R take the current state and the goal (return or state) as input, and train a two-layer MLP to predict the actions via supervised learning. For value-based methods, in order to solve the problem of overestimating values induced by distributional shift, CQL adds value regularization terms to the standard Bellman error objective to learn a lower bound of the true Q-function. IQL approximates the policy improvement step implicitly instead of updating the Q-function with target actions sampled from the behavior policy. For the additional goal (state)-conditioned baselines, GCIQL is a goal-conditioned version of IQL. WGCSL enhances GCSL with an advanced compound weight, which optimizes the lower-bound of the goal-conditioned RL objective. DWSL first models the distance between states and the goal, and extracts the policy by imitating the actions that reduce the minimum distance metric.
Baseline Performance Source. For AntMaze, we use v2 version for D4RL environments and v0 version for the additional AntMaze-Ultra environments. For Gym Locomotion and Kitchen, we use v2 and v0 version of the datasets from the D4RL benchmark, respectively. For all baselines except TT, DD and TAP, we obtain their performance by re-running author-provided (CQL, IQL, DT, WGCSL, GCIQL, DWSL) or our replicated (BC, RvS-G/R) implementations with our evaluation protocol. For CQL’s performance on Kitchen, we are unable to reproduce the previously reported performance with the default hyperparameters, so we take the corresponding results from [2]. For additional goal (state)-conditioned baselines (i.e. WGCSL, GCIQL and DWSL), we take the implementations provided by DWSL authors111https://github.com/jhejna/dwsl/, and use the same goal specification (see details in A.6) for AntMaze and Kitchen as ours. For TT, DD and TAP’s performance, we take the results from the original papers.
A.2 Evaluation Protocol
Many prior work [48, 18] reports their performance by taking the final checkpoint’s evaluation results and averaging them over multiple seeds. However, in some cases we observe that this evaluation protocol can lead to large oscillations in the policy performance when gradient steps (or training epochs) are slightly perturbed or the random seeds are changed (as in Figure A1). As different methods may use various number of training steps, seeds and evaluation trajectories, it hampers drawing robust conclusions by comparing these results. To faithfully capture the performance trend, which is crucial for ablation analysis, for each seed we take the best evaluation result among the last five checkpoints as its performance, where each evaluation result is the average return over evaluation trajectories (e.g. ) achieved by a given checkpoint, and then we calculate the mean performance and standard deviation over five seeds. Empirically we find this evaluation protocol yields results that are less sensitive to the above factors and usually have smaller error bounds, facilitating the comparisons in ablation studies. Meanwhile, we observe that in some cases this evaluation protocol might lead to results that are higher than those reported in previous papers, especially when the policy has more drastic performance fluctuations during training. We re-run most baselines using the same evaluation protocol for fair comparisons.
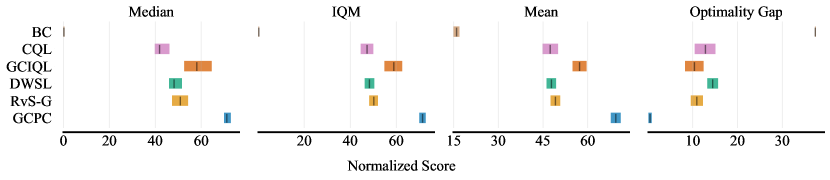
To investigate the impact of different aggregation metrics, we follow [1] to compare performance aggregation using mean, median, IQM and optimality gap on the AntMaze tasks. In Figure A2, we observe that GCPC consistently outperforms compared baselines across all metrics.
A.3 Hyperparameter
We list hyperparameters for BC and RvS-G/R replication in Table A1 and GCPC implementation in Table A2. For RvS-G/R and PolicyNet in GCPC, we use a two-layer feedforward MLP as the policy network, taking the current state and goal (state or return-to-go) as input, the only difference is that PolicyNet takes the bottleneck as an additional input. All experiments are performed on a single Nvidia RTX A5000.
| Hyperparameters | Value |
|---|---|
| Hidden Layers | 2 |
| Embedding Dim | 1024 |
| Nonlinearity | ReLU |
| Epochs | 80 AntMaze, Kitchen |
| 100 Gym Locomotion | |
| Batch Size | 1024 AntMaze, Gym Locomotion |
| 256 Kitchen | |
| Dropout | 0 |
| Optimizer | Adam |
| Learning Rate | 1e-3 |
| Hyperparameters | Values | |
| Optimizer | Adam | |
| TrajNet | Encoder Layers | 2 |
| (Bidirectional Transformer) | Decoder Layers | 1 |
| Attention Heads | 4 | |
| Embedding Dim | 256 | |
| Nonlinearity | GELU | |
| Slot Tokens | 4 | |
| (History Window , Future Window ) | (10, 70) AntMaze | |
| (5, 30) Kitchen | ||
| (5, 20) Locomotion | ||
| Epochs | 60 AntMaze, Locomotion | |
| 20 Kitchen | ||
| Batch Size | 1024 | |
| Dropout | 0.1 | |
| Learning Rate | 1e-4 | |
| PolicyNet | Hidden Layers | 2 |
| (Multi-Layer Perceptron) | Embedding Dim | 1024 |
| Nonlinearity | ReLU | |
| Epochs | 80 AntMaze, Kitchen | |
| 100 Gym Locomotion | ||
| Batch Size | 1024 AntMaze, Gym Locomotion | |
| 256 Kitchen | ||
| Dropout | 0 | |
| Learning Rate | 1e-3 AntMaze, Gym Locomotion | |
| 1e-4 Kitchen |
A.4 Explicit future
Existing methods, like TT and DD, utilize future information by sampling future states (or transitions) and planning on the explicit future. TT learns a world model that autoregressively generates states, actions, rewards and return-to-go estimates, then uses beam search to select future trajectories with highest cumulative rewards. DD leverages the diffusion process with classifier-free guidance to generate future states that satisfy reward maximization or other constraints, and uses inverse dynamics to extract actions between future states.
In GCPC, we compress the goal-conditioned future into latent representations and use them to support policy learning. In Section 4.4, we study the effect of explicitly leveraging the decoded future states. We adapt our framework as follows: During the policy learning and evaluation, we first freeze transformer encoder and decoder trained in the first stage. Instead of directly passing the encoded bottlenecks to the PolicyNet, we leverage the pre-trained transformer decoder to decode the bottleneck into goal-conditioned futures. The new PolicyNet is modified to take the observed states, the goal, and the concatenation of the decoded future states. The bottleneck is discarded and not used by the modified PolicyNet.
A.5 Future window length
We further investigate the effect of future window length on policy performance, which decides how far the bottleneck can look into the future during the first stage pretraining. In Table A3, we show that predicting further future would generally bring bigger improvements in AntMaze-Large, emphasizing that planning into long-term future can largely benefit policy performance. We also observe that the improvements brought by enlarging future window are specific to both datasets and the range of future window length. The improvements become marginal once the future window expands beyond a certain size.
| Future window length | 20 | 40 | 70 |
|---|---|---|---|
| Large-Diverse | 62.4 5.6 | 78.2 4.8 | 80.6 3.9 |
| Large-Play | 49.6 6.7 | 76.6 5.0 | 78.2 3.2 |
| Average | 56.0 | 77.4 | 79.4 |
A.6 Goal Sampling and Specification
To perform goal-conditioned imitation learning, we follow [15] to sample an outcome from the future trajectory as the goal. When the goal is in the form of a target state (e.g. in AntMaze and Kitchen tasks), we randomly sample a reachable future state from and keeps the task-related subspace as . Specifically, for AntMaze we take the ant’s location as the goal, which are the first two dimensions of the state space; for Kitchen’s goal, we keep the dimensions that indicate the position of the target object in all 7 subtasks and zero out other dimensions (e.g. dimensions that indicate the robot proprioceptive state) in the 30-dimensional state space222In the Kitchen experiments, we found it important to zero-out redundant dimensions, such as robot proprioceptive dimensions, when specifying the task goal for goal (state)-conditioned methods. We use this specification for all goal (state)-conditioned methods.. When the goal is represented as the expected return-to-go (e.g. in Gym Locomotion tasks), we use the average return achieved over some number of timesteps into the future as (i.e. , where we follow [15] to set to the constant maximum episode length).
Appendix B Pseudocode of GCPC
Appendix C Pre-training mask ratio
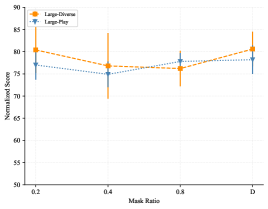
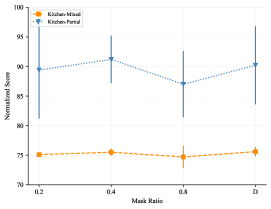
In the first stage of GCPC, we randomly mask history states with a masking ratio . We compare using fixed masking ratios (20%, 40%, 80%) and dynamic masking ratio “D” uniformly sampled from 0%, 20%, 40%, 60% and 80%. Figure A3 shows the influence of different masking ratios on AntMaze and FrankaKitchen. We found that low masking ratios (e.g. 20%) would usually perform worse except on the Kitchen-Mixed dataset, and a high masking ratio (80%) turns out to be more effective, which is similar to the observation in MAE [24]. However, the optimal masking ratio is not consistent across environments. In order to achieve the best overall performance, we adopt dynamic masking ratio “D” in our implementation.
Appendix D Additional Experiments on FrankaKitchen
In Table A4, we present how different pretraining objectives affect policy performance on the FrankaKitchen benchmark. MAE-F and MAE-RC are the only valid objectives in zero-shot setting. In two-stage setting, we observe that action inputs would generally cause larger variance and harm the performance of two predictive coding objectives. Similar to our observations on AntMaze, predictive coding objectives can consistently generate powerful trajectory representations, which yield performance gains on Kitchen tasks.
| Kitchen-Partial | AE-H | MAE-H | MAE-F | MAE-RC | MAE-ALL |
|---|---|---|---|---|---|
| Zero-shot | – | 0 | 4.4 9.8 | 4.4 6.5 | 0 |
| Two-stage (w/ actions) | 76.9 23.9 | 73.6 16.6 | 86.4 12.5 | 80.4 18.0 | 66.8 14.5 |
| Two-stage (w/o actions) | 66.4 5.9 | 72.7 7.0 | 92.5 4.9 | 90.2 6.6 | 68.0 4.9 |
Appendix E Visualizing the Latent Future
In this section, we visualize the latent future by decoding the bottlenecks back into the state space using the pre-trained decoder. We visualize the currently observed state and the decoded future states inside the maze environment. Figure A4 includes two examples extracted from successful evaluation rollouts. The blue part on the left shows the actual position of the agent at a certain timestep during the evaluation and the green part on the right is the latent future predicted based on history states and the goal . We find in the latent future, the agent gradually move towards the goal, which demonstrates that bottlenecks can encode meaningful future trajectories that provide the correct waypoints as subgoals and bring the agent from the current location to the final goal.
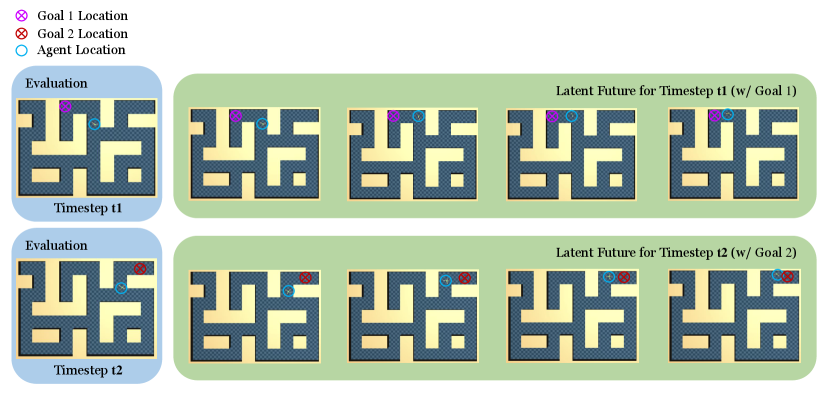
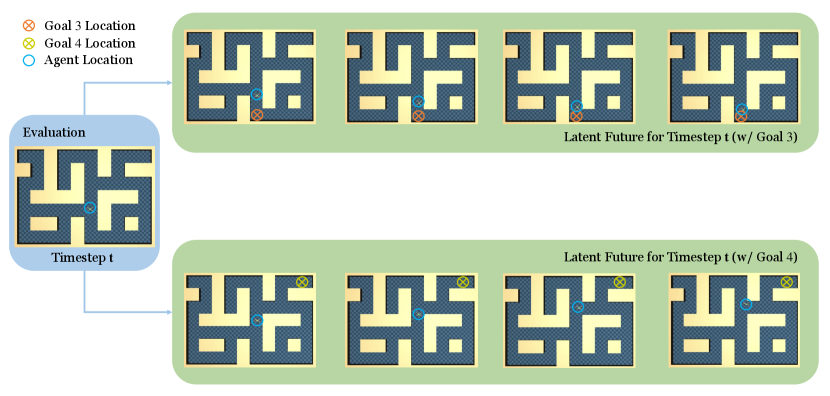
Figure A5 illustrates how latent future vary depending on different goal conditions for the same current state. By specifying different goals, the latent future would change correspondingly and point out the right direction for the agent. These visualizations suggest that the bottlenecks have the ability to provide the correct intermediate waypoints based on history states and the goal, which is crucial for long-horizon goal-reaching tasks. In the second example of Figure A5, multiple paths connect the agent and the goal, but bottlenecks encode the shortest one for the agent, which also demonstrates the bottleneck’s ability to stitch sub-optimal trajectories and compose the optimal path.
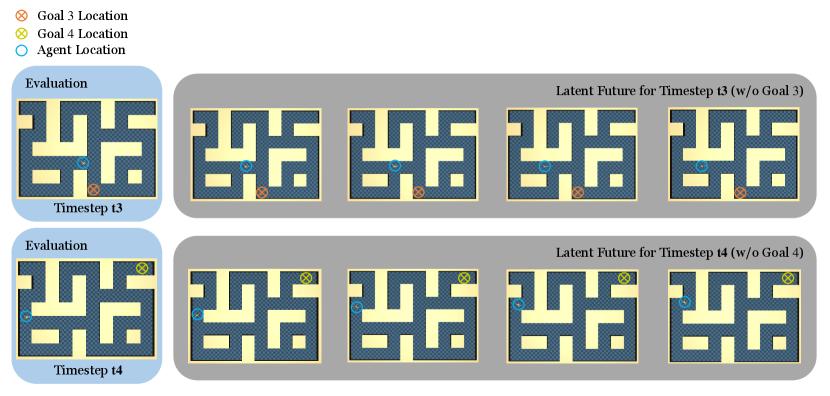
In Section 4.3, we found that removing the goal from TrajNet input would seriously harm the performance on large AntMaze. In Figure A6, we visualize the latent future without goal conditioning. In both examples, bottlenecks encode latent futures that either move in the opposite direction to the goal or enter a dead end and cause tasks to fail. It again demonstrates that the quality of the encoded future would significantly affect how policy performs, and providing goal information can prevent misleading future.
Appendix F Slot tokens ablation
Table A5 shows how changing the number of slot tokens would affect policy performance on large AntMaze. We observed that using different numbers of slot tokens would not have big impacts on the performance. In our implementation, we uniformly use 4 slot tokens for both trajectory representation learning and policy learning.
| # Slot Tokens | 1 | 2 | 4 |
|---|---|---|---|
| Large-Diverse | 80.6 3.5 | 77.2 4.9 | 80.6 3.9 |
| Large-Play | 81.2 4.4 | 78.8 4.7 | 78.2 3.2 |