HEAT EQUATION ON THE HYPERGRAPH CONTAINING VERTICES WITH GIVEN DATA
Abstract
This paper is concerned with the Cauchy problem of a multivalued ordinary differential equation governed by the hypergraph Laplacian, which describes the diffusion of “heat” or “particles” on the vertices of hypergraph. We consider the case where the heat on several vertices are manipulated internally by the observer, namely, are fixed by some given functions. This situation can be reduced to a nonlinear evolution equation associated with a time-dependent subdifferential operator, whose solvability has been investigated in numerous previous researches. In this paper, however, we give an alternative proof of the solvability in order to avoid some complicated calculations arising from the chain rule for the time-dependent subdifferential. As for results which cannot be assured by the known abstract theory, we also discuss the continuous dependence of solution on the given data and the time-global behavior of solution.
1 Introduction
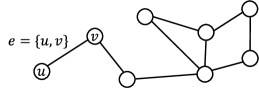
Let be a finite set, be a family of subsets consisting of two or more elements of , and . The triplet , which is called hypergraph, can be interpreted as a model of a network structure in which vertices are connected by each hyperedge (see Fig. 1).
In order to investigate the structure of network represented by a hypergraph, Yoshida [16] introduced a nonlinear set-valued operator on (the family of mappings ) as follows. Define with respect to each and
| (1) |
These are convex functionals with domains and then subdifferentiable at every . By the chain rule (see, e.g., [2]) and the maximum rule (see, e.g., [13, Proposition 2.54]), the subdifferential of coincides with
| (2) |
where , called base polytope for , is defined by
| (3) |
and with stands for
| (4) |
This operator is called hypergraph (-)Laplacian, where (see also [7]).
When and every consists of two elements of , then becomes a linear operator on , i.e., a square matrix of order and represents the movement of “particles” on a vertex to another adjacent vertex through an edge in the random walk model on the graph. By analogy with this, we can regard the ODE with respect to as a diffusion model of “heat” or “particles” on each vertex , which is described by . In fact, the time-global behavior of solution to this ODE (studied in [7]) quite resembles those to the PDE . In information science, this ODE is used to investigate the eigenvalues of , prove the Cheeger like inequality, and analyze the cluster structure of network represented by hypergraph (see, e.g., [3, 6, 12, 15]).
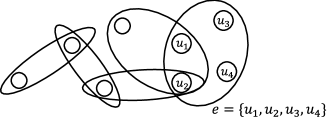
Here let the heat on two vertices be fixed as and (). Under this situation, the final state of the diffusion process might describe the thermal gradient in each path and then indicate the optimal path of heat flux from vertex to . As a generalization of this problem, we deal with the case where the heat at vertices are determined by some given functions (), i.e., the heat equation governed by under the condition
| (5) |
(see Fig. 2). This can be interpreted as a situation where the observer internally manipulates the heat of the network. As another example, the graph Laplacian (2) and its energy functional (1) on the usual graph can be found in the definition of Laplacian on the fractal (see, e.g., [10, 11]). In this case, the assumption corresponds to a homogeneous Dirichlet boundary condition on the fractal.
We here state the setting of our problem more precisely. Without loss of generality, we assume the hypergraph is connected, i.e., for every there exist some and such that holds for any , where and (if is disconnected, we only have to divide into connected components and consider the problem on each component, see [7]).
By letting , we can identify (the family of mappings from onto ) with the Euclidean space ((4) coincides with a unit vector of the canonical basis). In this sense, is a Hilbert space endowed with the standard inner product and the norm . For , we shall write for the same reason.
For convenience, the given data in (5) will be unified by as
| (6) |
Let be a constraint set which corresponds to the condition (5) such that the former components are chosen freely and the latter components are fixed by given data . Namely, define
Note that is a closed convex subset in and the projection onto can be defined by
| (7) |
Moreover, let stand for the indicator on :
| (8) |
We can define the subdifferential of on . Here when is a proper () lower semi-continuous and convex function, its subgradient at is defined by
| (9) |
Then the diffusion process on the hypergraph with the condition (5) and the initial state can be represented by the following Cauchy problem of an evolution equation with constraint condition:
where is the given external force.
Since holds for every (i.e., ), we have . Therefore (P) can be reduced to a problem of evolution equation governed by a subdifferential operator of time-dependent functional , which has been investigated in numerous papers, e.g., [4, 5, 8, 9, 14]. In this paper, however, we aim to introduce a simpler method for the constraint problem (P) by focusing on features of and stated in the next section. We prove the existence of solution to (P) in §3. As for a result which cannot be assured by the known abstract theory, we discuss the continuous dependence of solution on the given data in §4. Finally, we consider the time-global behavior of solution in §5 by using the facts given in previous parts.
2 Preliminary
In this section, we check and review some basic facts for later use. First, the subgradient of (8) can be written specifically as follows:
Lemma 2.1.
For any and , the subdifferential of is characterized by
Proof..
Let . By the definition of subdifferntial (9), holds for every . When , we have
Hence it is necessary that holds for any (). This implies that should be equal to zero and can be chosen arbitrarily. ∎
We next check the following Poincaré type inequality by repeating the argument in [7]. Here and henceforth, in (1) will be abbreviated to .
Theorem 2.2.
Let the hypergraph be connected and . Then there exists some constant depending only on and such that
| (10) |
Proof..
Let the index satisfy . Since is assumed to be connected, for every fixed () there exist some and s.t. () holds, where and . By and Hölder’s inequality, we have
where is the Hölder conjugate exponent. Then we obtain (10) with the positive constant . ∎
Note that (see [7, Theorem 2.4])
| (11) |
In addition, we can easily show that by definition and for any since can be identified with a unit vector of . Hence as for the boundedness of and ,
| (12) |
hold for every and , where is the number of hyperedges.
We also recall a variant of Gronwall’s inequality as follows (see [1, Lemme A.5]). Let () and denote the family of which satisfies and , respectively. Moreover, implies that and its derivative belong to .
Lemma 2.3.
Let be continuous and satisfy
with some constant and non-negative function . Then satisfies
3 Existence of Solution
We begin with the solvability of (P):
Theorem 3.1.
Let and . Then for any and , (P) possesses a unique solution .
This result can be assured by known results for abstract theory of nonlinear evolution equations with time-dependent subdifferential. Indeed, we can apply [9, Theorem 1.1.2] since satisfies the condition (H)2 in [9, §1.5] if . In this section, however, we shall give an alternative proof which only relies on the basic properties of subdifferential in order to avoid some complicated calculations arising from the chain rule of .
Proof..
Remark that the Moreau-Yosida regularization of and its subdifferential (the Yosida approximation of ) coincide with
We first replace in (P) with and consider the following approximation problem:
By the Lipschitz continuity of , the abstract theory (see e.g, [1, Théorème 3.6]) yields the existence of a unique solution to (P)λ for every and .
We establish a priori estimates independent of . Since
multiplying
by and using (9), we have
Hence if , we obtain
| (13) |
From this and (12), there exists some constant independent of such that
| (14) |
where is the section of (P)λ, i.e., fulfills
for a.e. . We next test (P)λ by . Since does not depend on the time, the standard chain rule is valid (see [1, Lemme 3.3]). Moreover, from
and (14), we can derive
By , we get
| (15) |
By (14) and (15), we can apply the Ascoli-Arzela theorem and extract a subsequence of which converges uniformly in (we omit relabeling since the original sequence also converges as will be seen later). Let be its limit. Furthermore, (14) and (15) also lead to
and the demiclosedness of maximal monotone operators implies that the limit satisfies for a.e. . Since (15) yields
we have , i.e., for every . By the equation,
and (a.e. ) hold. Then it follows from (9) that for every satisfying ,
By taking its limit as , we obtain
which entails a.e. . Thus the limit fulfills all requirements of the solution to (P).
The uniqueness of solution can be guaranteed by the monotonicity of and . Therefore the limit is determined independently of the choice of subsequences and then the original sequence also converges to . ∎
Remark 3.2.
We can find several abstract results for the case where the movement of the constraint set is not smooth (see, e.g., [4, §4]). However, it seems to be difficult to mitigate our assumption since does not possess any interior point and the smoothness of movement of must exactly coincide with the regularity of the solution.
4 Continuous Dependence of Solutions on Given data
We next consider the dependence of solutions with respect to the given data.
Theorem 4.1.
Let and let be the solution to (P) (). Then there exists a constant depending only on and such that
| (16) |
Proof..
Let and be the sections of (P) (), namely, satisfy
for a.e. . Multiply the difference of equations, which is equivalent to
by
(recall ). According to Lemma 2.1, can be represented as and then fulfill
For the same reason, also holds by . Therefore we can derive
| (17) |
which provides (16) by Lemma 2.3 with
and (12). ∎
Remark 4.2.
Remark 4.3.
Theorem 4.1 implies that the solution to (P) is -Hölder continuous with respect to the given data . This seems to be optimal and it is difficult to derive better estimate in general. Indeed, let , be a solution to (P) (), and be the section of (P). Moreover, we assume the initial data for satisfies
with some and for fulfills
with some . By the continuity of solutions and , there exists some such that the solutions still satisfy and (, ) on . Then we can see by (2) that with can be represented by
Hence we can obtain
which appears in the estimate above. It is not obvious whether we can deduce the term from this.
5 Asymptotic Behavior of Global Solution
Throughout this section, let stand for a unique solution to (P). According to Theorem 3.1, the solution can be globally extended if
| (18) |
We discuss the global behavior of solution. In addition to the above, we assume
| (19) |
so that and can be determined uniquely.
We first consider the case where is independent of the time. Henceforth, is abbreviated to when is a constant vector.
Proposition 5.1.
Proof..
We can apply [1, Théorème 3.11], since is time-independent. ∎
Remark 5.2.
Let be a constant vector. By the definition of subdifferential (9), holds if and only if the closed convex set is not empty, where is a proper lower semi-continuous convex function defined by
From this and , we can derive for every . Since Theorem 2.2 implies
there exists a global minimizer for every , i.e., holds if . When , however, we can see that . Indeed,
satisfy as (see (12)).
We next deal with the case where depends on and as .
Theorem 5.3.
Proof..
Henceforth, let denote general constants independent of . Note that the assumptions lead to and .
Testing (P), which is equivalent to
by (recall (6)), we obtain
| (21) |
Here we use the fact that holds for every by Lemma 2.1 and by . By Lemma 2.3, we have for arbitrary
| (22) |
Since is assumed and holds by (12), it follows that is bounded. This together with (12) implies that the section of (P) satisfies . Moreover, Theorem 2.2 yields
Hence integrating (21) over , we also get .
Next multiplying (P) by and using the boundedness of , we have
We here used Lemma 2.1 and . From and , we can derive .
Define the -limit set of the solution to (P) by
By the global boundedness of given above, holds under the assumptions of Theorem 5.3. Let and satisfy and as . Note that since and .
From , it follows that for every
as , that is, holds uniformly with respect to .
We here define by . Then it is easy to see that uniformly in and is a solution to
Let be the section of this inclusion, then
Hence in by .
Choose arbitrarily and define
Obviously, converges to as uniformly with respect to . By the definition of subdifferential (9) and , we obtain
Since and (12), the dominated convergence theorem is applicable to this and
holds for every , which implies that attains its minimum at . When , the minimum of coincides with . From this fact and (11), we can derive . Since the limit is determined independently of the choice of subsequences , the whole trajectory also tends to . Therefore we can conclude that .
We next consider that case where . When , there exists some subsequence such that and , which together with (11) leads to . This implies that can not be deduced via a priori estimate (22). We here give another way to establish uniform estimates by using Theorem 4.1.
Theorem 5.4.
Proof..
Let satisfy , which means that is a solution to (P). By Theorem 4.1 with , we obtain
where is a general constant independent of . Then when , we can obtain . Otherwise, let , which satisfies from above. Hence if , we obtain . By the arbitrariness of , it follows that , which leads to . Testing (P) by , we have
Here is uniformly bounded by (19) and . Hence also holds.
Fix and let satisfy and as . As above, define , which is the solution to
Then the section of this inclusion satisfies
namely, in . For every we can obtain
where . Therefore attains its minimum at , which implies that .
Again, choose arbitrarily and let satisfy . Since is a solution to (P), we can derive from Theorem 4.1 with replaced by
for every . Hence can be assured regardless of the choice of subsequences, that is, the limit is determined uniquely. ∎
Remark 5.5.
Under the same assumptions for and as in Theorem 5.4, we can use [5, Theorem 2] and show the uniform boundedness of without any restriction for (see also [8, Theorem 2.2] and [14, Theorem 2.2] for global boundedness of solution). Hence we can derive Theorem 5.4 for every by referring known abstract results. We here mention that, however, the convergence of whole sequence without extraction specific subsequence can be obtained in our result thanks to the continuous dependence of solutions (Theorem 4.1), which can not be assured only by [5, 8, 14]. Moreover, we recall that the decay estimate (20) in Theorem 5.3 is derived from the Poincaré type inequality (Theorem 2.2), that is, the nature of the hypergraph Laplacian.
Acknowedgements
T. Fukao is supported by JSPS Grant-in-Aid for Scientific Research (C) (No.21K03309). M. Ikeda is supported by JST CREST Grant (No.JPMJCR1913) and JSPS Grant-in-Aid for Young Scientists Research (No.19K14581). S. Uchida is supported by JSPS Fund for the Promotion of Joint International Research (Fostering Joint International Research (B)) (No.18KK0073) and Sumitomo Foundation Fiscal 2022 Grant for Basic Science Research Projects (No.2200250).
References
- [1] H. Brézis, Opérateurs maximaux monotones et semi-groupes de contractions dans les espaces de Hilbert, North-Holland, Amsterdam, 1973.
- [2] C. Combari; M. Laghdir; L. Thibault, A note on subdifferentials of convex composite functionals, Arch. Math. 67 (1996), 239–252.
- [3] K. Fujii; T. Soma; Y. Yoshida, Polynomial-Time Algorithms for Submodular Laplacian Systems, Theoret. Comput. Sci. 892 (2021), 170–186.
- [4] T. Fukao; N. Kenmochi, Parabolic variational inequalities with weakly time-dependent constraints, Adv. Math. Sci. Appl. 23(2) (2013), 365–395.
- [5] H. Furuya; K. Miyashiba; N. Kenmochi, Asymptotic behavior of solutions to a class of nonlinear evolution equations, J. Differential Equations 62(1) (1986), 73–94.
- [6] M. Ikeda; A. Miyauchi; Y. Takai; Y. Yoshida, Finding cheeger cuts in hypergraphs via heat equation, Theoret. Comput. Sci. 930, (2022), 1–23.
- [7] M. Ikeda; S. Uchida, Nonlinear evolution equation associated with hypergraph Laplacian, preprint (https://arxiv.org/abs/2107.14693).
- [8] A. Ito; N. Yamazaki; N. Kenmochi, Attractors of nonlinear evolution systems generated by time-dependent subdifferentials in Hilbert spaces, 327–349, in Dynamical Systems and Differential Equations Vol. 1, Southwest Missouri State University, Springfield, 1998.
- [9] N. Kenmochi, Solvability of nonlinear evolution equations with time-dependent constraints and applications, Bull. Fac. Edu. Chiba Univ. 30 (1981), 1–87.
- [10] J. Kigami, A harmonic calculus on the Sierpinski spaces, Japan J. Appl. Math. 6 (1989), 259-290.
- [11] J. Kigami, Analysis on fractals, Cambridge Tracts in Mathematics 143, Cambridge University Press, Cambridge, 2001.
- [12] P. Li; O. Milenkovic, Submodular hypergraphs: -Laplacians, Cheeger inequalities and spectral clustering, Proc. 35th Internat. Conf. on Machine Learning, PMLR 80 (2018), 3014–3023.
- [13] B. S Mordukhovich; N. M. Nam, An Easy Path to Convex Analysis and Appli- cations, Morgan and Claypool Publishers, Williston, VT, 2014.
- [14] K. Shirakawa; A. Ito; N. Yamazaki; N. Kenmochi, Asymptotic Stability for Evolution Equations Governed by Subdifferentials, 287–310, in Recent Developments in Domain Decomposition Methods and Flow Problems, Gakuto Intern. Ser., Math. Sci. Appl. Vol. 11, Gakkotosho, Tokyo, 1998.
- [15] Y. Takai; A. Miyauchi; M. Ikeda; Y. Yoshida, Hypergraph clustering based on PageRank, Proc. 26th ACM SIGKDD Internat. Conf. on Knowledge Discovery & Data Mining (2020), 1970–1978.
- [16] Y. Yoshida, Cheeger Inequalities for Submodular Transformations, Proc. 2019 Annu. ACM-SIAM Symp. on Discrete Algorithms (SODA) (2019), 2582–2601.
Fukao Takeshi
Department of Mathematics,
Kyoto University of Education,
1 Fujinomori, Fukakusa,
Fushimi-ku, Kyoto,
612-8522, JAPAN.
E-mail address: fukao@kyokyo-u.ac.jp
Masahiro Ikeda
Department of Mathematics,
Faculty of Science and Technology,
Keio University,
3-14-1 Hiyoshi Kohoku-ku, Yokohama,
223-8522, JAPAN/
Center for Advanced Intelligence
Project, RIKEN, Tokyo,
103-0027, JAPAN.
E-mail address: masahiro.ikeda@keio.jp/
masahiro.ikeda@riken.jp
Shun Uchida
Department of Integrated Science and Technology,
Faculty of Science and Technology,
Oita University,
700 Dannoharu, Oita City, Oita Pref.,
870-1192, JAPAN.
E-mail address: shunuchida@oita-u.ac.jp