Lê numbers and Newton diagram
Abstract.
We give an algorithm to compute the Lê numbers of (the germ of) a Newton non-degenerate complex analytic function in terms of certain invariants attached to the Newton diagram of the function , where is the dimension of the critical locus of and are sufficiently large integers. This is a version for non-isolated singularities of a famous theorem of A. G. Kouchnirenko. As a corollary, we obtain that Newton non-degenerate functions with the same Newton diagram have the same Lê numbers.
Key words and phrases:
Non-isolated hypersurface singularity, Lê numbers, Newton diagram, Modified Newton numbers, Iomdine-Lê-Massey formula2010 Mathematics Subject Classification:
32S25, 14J17, 14J701. Introduction
The most important numerical invariant attached to a complex analytic function with an isolated singularity at is its Milnor number at (denoted by ). By a theorem of A. G. Kouchnirenko [7], we know that if is (Newton) non-degenerate and such that its Newton diagram meets each coordinate axis (so-called “convenient” function), then has an isolated singularity at and coincides with the Newton number of — a numerical invariant attached to the Newton diagram of . Actually, if is a non-degenerate function with an isolated singularity at , then even if is not convenient (see [1]). This provides an elegant and easy way to compute the Milnor number of such functions.
For a function with a non-isolated singularity at , the Milnor number is no longer relevant. However, we can attach to such a function a series of polar invariants which plays a similar role to that of the Milnor number for an isolated singularity. These polar invariants are called Lê numbers. They were introduced by D. B. Massey in the 1990s (see [10, 11, 12]). Then we may wonder whether like for the Milnor number, the Lê numbers of a non-degenerate function with a non-isolated singularity at can also be described with the help of invariants attached to a Newton diagram. In this paper, we positively answer this question. More precisely, we show that the Lê numbers of a non-degenerate function can be expressed in terms of certain invariants (which we shall call modified Newton numbers) attached to the Newton diagram of the function , where is the dimension at of the critical locus of and are sufficiently large integers (see Theorem 4.1).
As an important corollary, we obtain that non-degenerate functions with the same Newton diagram have the same Lê numbers (see Corollary 5.1). In particular, any -parameter deformation family of non-degenerate functions with constant Newton diagram has constant Lê numbers. We recall that families with constant Lê numbers satisfy remarkable properties. For example, in [11], Massey proved that under appropriate conditions the diffeomorphism type of the Milnor fibrations associated to the members of such a family is constant. In [5], J. Fernández de Bobadilla showed that in the special case of families of -dimensional singularities, the constancy of Lê numbers implies the topological triviality of the family at least if .
The paper is organized as follows. In Section 2, we recall the definition of the Lê numbers. In Section 3, following Kouchnirenko’s definition of the Newton number, we introduce our modified Newton numbers. Our main result — the formulas for the Lê numbers of a non-degenerate function in terms of the modified Newton numbers of the function — is given in Section 4. Corollaries of these formulas are given in Section 5. In Section 6, we discuss a complete example. Finally, in Sections 7 and 8, we give the proofs of our main result and main corollary respectively.
2. Lê numbers
Lê numbers are intersection numbers of certain analytic cycles — so-called Lê cycles — with certain affine subspaces. The Lê cycles are defined using the notion of gap sheaf. In this section, we briefly recall these definitions which are essential for the paper. We also recall the notion of “polar ratio” which is involved in so-called Iomdine-Lê-Massey formula. This formula plays a crucial role in the proof of our main theorem.
2.1. Gap sheaves
Let be a complex analytic space, be an analytic subset of , and be a coherent sheaf of ideals in . As usual, we denote by the analytic space defined by the vanishing of . At each point , we want to consider scheme-theoretically those components of which are not contained in . For this purpose, we look at a minimal primary decomposition of the stalk of in the local ring , and we consider the ideal in consisting of the intersection of those (possibly embedded) primary components of such that . This definition does not depend on the choice of the minimal primary decomposition of . Now, if we perform the operation described above at the point simultaneously at all points of , then we obtain a coherent sheaf of ideals called a gap sheaf and denoted by . Hereafter, we shall denote by the scheme (i.e., the complex analytic space) defined by the vanishing of the gap sheaf .
2.2. Lê cycles and Lê numbers
Consider an analytic function , where is an open neighbourhood of in , and fix a system of linear coordinates for . Let be the critical locus of . For , the th (relative) polar variety of with respect to the coordinates is the scheme
The analytic cycle
is called the th Lê cycle of with respect to the coordinates . (We always use brackets to denote analytic cycles.) The th Lê number of at with respect to the coordinates is defined to be the intersection number
| (2.1) |
provided that this intersection is -dimensional or empty at ; otherwise, we say that is undefined.111As usual, denotes the analytic cycle associated to the analytic space defined by . The notation stands for the intersection number at of the analytic cycles and . For , the relation (2.1) means
For any , the Lê number is always defined and equal to zero. For this reason, we usually only consider the Lê numbers
Note that if is an isolated singularity of , then (which is the only possible non-zero Lê number) is equal to the Milnor number of at .
2.3. Polar ratios
As already mentioned above, a key ingredient in the proof of our main result is the Iomdine-Lê-Massey formula (see [12, Theorem 4.5]). Roughly, this formula says that if the Lê numbers of at with respect to exist and if , then for any integer large enough, and the Lê numbers of at with respect to the rotated coordinates exist and they can be described in terms of the Lê numbers of the original function . Moreover, the formula says that any is suitable, where is the maximum “polar ratio” of at with respect to . In this section, we recall the definition of polar ratios (see [12, Definition 4.1]).
The notation is as in Section 2.2. Suppose that . Let be an irreducible component of (with its reduced structure) such that . The polar ratio of at is the number defined by
If , then we say that the polar ratio of at is equal to . A polar ratio for at with respect to is any one of the polar ratios at of any component of .
For example, if is a homogeneous polynomial and if , then each component of is a line, and hence the polar ratios for at with respect to are all equal to or to the degree of the polynomial (see [12, Remark 4.2]).
In [13, Section 3.2], M. Morgado and M. Saia gave an upper bound for the maximal polar ratio for a semi-weighted homogeneous arrangement.
3. Newton diagram and modified Newton numbers
Let be a system of coordinates for , let be an open neighbourhood of the origin in , and let
be an analytic function, where , , and is a notation for the monomial .
3.1. Newton diagram
Here, the reference is Kouchnirenko [7]. The Newton polyhedron of (at the origin and with respect to the coordinates ) is the convex hull in of the set
For any , put
where denotes the standard inner product in . A subset is called a face of if there exists such that . The dimension of a face of is the minimum of the dimensions of the affine subspaces of containing . The Newton diagram (also called Newton boundary) of is the union of the compact faces of . It is denoted by . We say that is convenient if the intersection of with each coordinate axis of is non-empty (i.e., for any , the monomial , , appears in the expression with a non-zero coefficient).
For any face , define the face function by
We say that is Newton non-degenerate (in short, non-degenerate) on the face if the equations
have no common solution on . We say that is (Newton) non-degenerate if it is non-degenerate on every face of .
3.2. A bound for non-degeneracy of certain functions
Another important ingredient in the proof of our main theorem is Lemma 3.7 of [1]. This lemma asserts that if is a non-degenerate function with a singularity at , then there exists a constant such that for any , the function is non-degenerate too. Such a (non unique) number is defined as follows. For each face with maximal dimension (i.e., is not contained in any other face), choose a vector such that , and define
where the union is taken over all maximal dimensional faces . Clearly, is a compact set and it intersects each coordinate axis of in a closed interval, say for some . Then define
Of course, depends on the choice of the vectors . It is possible to define a “smallest” number that also guarantees the non-degeneracy of the functions with (see [6, Section 2]). However, for our purpose, we shall not need it.
3.3. Newton number
Again, the reference for this section is [7]. Throughout the paper, for any subsets and , we shall use the following notation:
In particular, for any , the set is nothing but the intersection of with the th coordinate axis of .
Let denote the cone over with the origin as vertex. If is convenient, then the Newton number of is defined by
| (3.1) |
where is the cardinality of and is the -dimensional Euclidean volume of . For , the subset reduces to , and we set .
The Newton number can also be defined even if is not convenient. More precisely, if is the non-empty subset of such that meets the th coordinate axis of if and only if , then the Newton number of is defined as
where of course the Newton number of the (convenient) function is given by (3.1).
3.4. Modified Newton numbers
Following Kouchnirenko’s definition of the Newton number, we now introduce our modified Newton numbers.
Let be a non-empty subset of such that . By [3, Theorem 1], choose a simplicial decomposition of in which the vertices of a simplex are -dimensional faces of (such a decomposition is not unique). The cones spanned by the origin and such simplexes give a simplicial decomposition
of . Note that
| (3.2) |
Clearly, each simplex may be identified to a simplex (still denoted by ) of , and with such an identification, the volume of a simplex with maximal dimension (i.e., with dimension ) is given by
| (3.3) |
where are the column vectors representing the coordinates of the vertices of the simplex . Note that each such column vector has components, so that the matrix in (3.3) has dimension .
Let be another subset of . We suppose that for any the Newton boundary meets the th coordinate axis of . Then to each , we associate a subset of (depending on , and ) as follows. If , then we define as the set of all simplexes (as simplexes in ) with maximal dimension such that for any the following property holds true:
(As usual, by an “edge” of a simplex we mean a -dimensional face.) If (in particular if ) or if , then we set .
By definition, if is a simplex of , then it has maximal dimension and possesses a vertex with coordinates of the form (for some located at the th place). To each such a simplex , we associate a (unique) “reduced” simplex defined by the same vertices as those of with the exception of the vertex which we replace by . We denote by the set of such reduced simplexes.
By convention, for the next definition and all the statements hereafter, we agree that if is a non-empty subset of such that is empty, then the corresponding “simplicial decomposition” is the empty set.
Definition 3.1.
For each , , and each collection as above, we define a modified Newton number for the function by
(If or if , then , and the corresponding term in the above sum is zero by convention.)
Similarly, we introduce the subset of consisting of those simplexes with maximal dimension and such that for any the intersection is not an edge of .
Definition 3.2.
For each and each as above, we define a special modified Newton number for the function by
Let us emphasize the fact that the simplexes involved in the definition of the modified Newton number are reduced simplexes, while those used to define the special modified Newton number are not reduced.
4. Formulas for the Lê numbers of a non-degenerate function
Let be a system of linear coordinates for , let be an open neighbourhood of the origin in , and let be a non-degenerate analytic function. We denote by the critical locus of , and we suppose that . We also assume that the Lê numbers
of at with respect to the coordinates are defined. For example, if the coordinates are “prepolar” for (see [12, Definition 1.26]), then the corresponding Lê numbers do exist. In particular, this is the case if has an “aligned” singularity at (e.g., a line singularity) and the coordinates are “aligning” for at (see [12, Definition 7.1]).
For any , we consider the function
| (4.1) |
where are integers such that, for any ,
Here, is the maximum polar ratio for at with respect to the rotated coordinates
and is a bound which guarantees the non-degeneracy of the function (see Sections 2.3 and 3.2). (By and we mean and respectively.) For example, if is a homogeneous polynomial such that , then we can take , where .
Hereafter, we are mainly interested in the modified Newton numbers of the function . For each non-empty subset , we choose a simplicial decomposition
of as in Section 3.4 (again, if , then ), and we write . Since throughout this section we shall only consider modified Newton numbers of the form
() where is the dimension at of the critical locus , we may simplify the notation as follows:
Here is our main result.
Theorem 4.1.
Suppose that is non-degenerate, and the Lê numbers of at with respect to the coordinates are defined for any . Then the following two assertions hold true.
-
(1)
The modified Newton numbers and of the function do not depend on the choice of . Therefore, we may further simplify the notation as follows:
-
(2)
The Lê numbers are given by the following formulas:
-
;
-
for (if );
-
.
-
Theorem 4.1 is a version for non-isolated singularities of the Kouchnirenko theorem mentioned in the introduction. It will be proved in Section 7. The formulas given in item (2) reduce the calculation of the Lê numbers of a non-degenerate function to a simple computation of volumes of simplexes. Certainly, these formulas are well suited for computer algebra programs.
5. Corollaries
Let be linear coordinates for . The first important corollary of Theorem 4.1 is the invariance of the Lê numbers within the class of non-degenerate functions with fixed Newton diagram. More precisely we have the following statement.
Corollary 5.1.
Let be two non-degenerate analytic functions, where is an open neighbourhood of the origin of . Suppose that the dimensions at of the critical loci and of and , respectively, are greater than or equal to . If furthermore and the Lê numbers of and at with respect to the coordinates exist, then , and for any , we have
Corollary 5.1 will be proved in Section 8. In particular, it implies that any -parameter deformation family of non-degenerate functions with constant Newton diagram has constant Lê numbers, provided that these numbers exist. Here is a more precise statement.
Corollary 5.2.
Let be a -parameter deformation family of analytic functions defined in an open neighbourhood of and depending analytically on the parameter . If for any sufficiently small (say for some ), the function is non-degenerate, and all the Lê numbers are defined, then and for all small .
By combining Corollary 5.2 with [12, Theorem 9.4] and [5, Theorem 42], we obtain a new proof of the following result, which is a special case of a much more general theorem of J. Damon [2].
Corollary 5.3 (Damon).
Let be a family as in Corollary 5.2, that is, such that for any sufficiently small , the function is non-degenerate, and all the Lê numbers are defined. Under these assumptions, the following two assertions hold true.
-
(1)
If for all small , the coordinates are prepolar for and , then the diffeomorphism type of the Milnor fibration of at is independent of for all small .
-
(2)
If and for all small , then the family is topologically trivial.
Indeed, by Corollary 5.2, the family has constant Lê numbers with respect to the coordinates . Item (1) then follows from [12, Theorem 9.4] while item (2) is a consequence of [5, Theorem 42].
In fact, in [2], Damon obtains the topological triviality without the restrictions or . A third proof (based on so-called “uniform stable radius”) of item (2) for line singularities is also given in [4].
Finally, combined with [12, Theorem 3.3], Theorem 4.1 has the following corollary about the Euler characteristic of the Milnor fibre associated to a non-degenerate function.
Corollary 5.4.
Again, assume that is non-degenerate, and the Lê numbers of at with respect to the coordinates are defined for any . If furthermore the coordinates are prepolar for , then the reduced Euler characteristic of the Milnor fibre of at is given by
where is defined by (4.1).
6. Example
Consider the homogeneous polynomial function
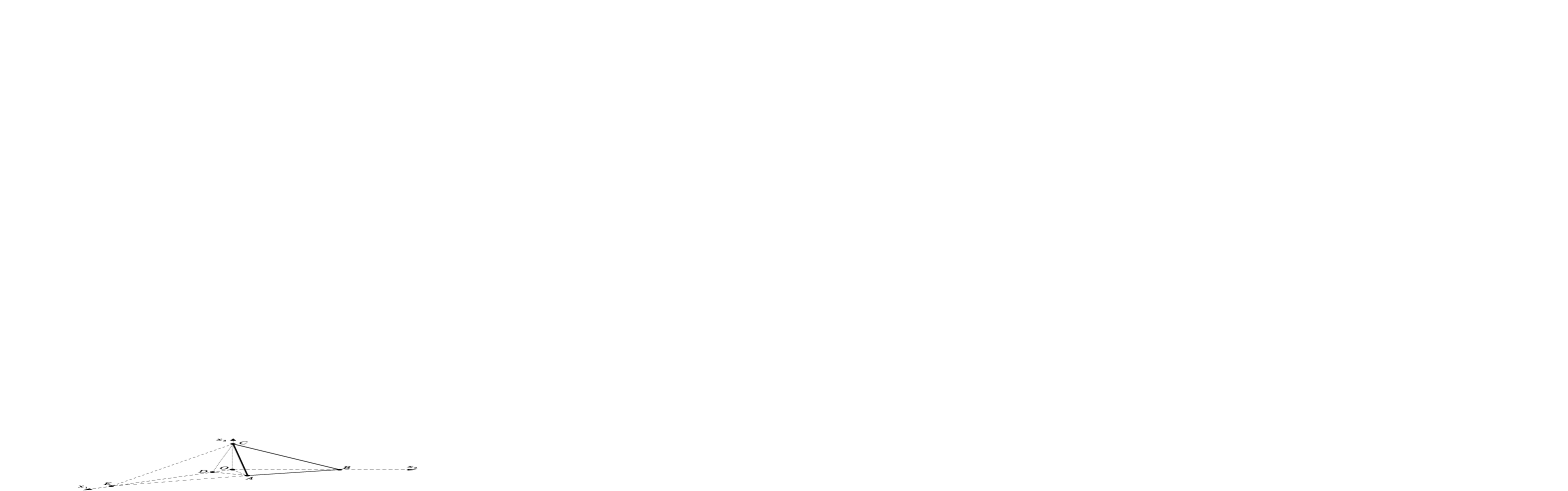
The Newton diagram of is nothing but the triangle in (with coordinates ) defined by the vertices , and (see Figure 1). We easily check that is non-degenerate. The critical locus of is given by the -axis, and the restriction of to the hyperplane defined by has an isolated singularity at . In other words, has a line singularity at in the sense of [9, §4]. Then, by [12, Remark 1.29], the partition of given by
is a “good stratification” for in a neighbourhood of , and the hyperplane is a “prepolar slice” for at with respect to (see [12, Definitions 1.24 and 1.26]). In other words, the coordinates are prepolar for . In particular, combined with [12, Proposition 1.23], this implies that the Lê numbers and are defined. We can compute these numbers either using the definition or by applying Theorem 4.1.
6.1. Calculation using the definition
We need to compute the polar varieties and and the Lê cycles and . By definition,
while
It follows that the Lê cycles are given by
and
Finally the Lê numbers are given by
6.2. Calculation using Theorem 4.1
Consider a polynomial function
such that . Since is a homogeneous polynomial of degree , the maximum polar ratio for at with respect to the coordinates is (see Section 2.3), and clearly, we can take . So, let us take for instance . Clearly, is the union of two tetrahedra and . For each subset , take the “natural” simplicial decomposition of generated by the vertices of the set as suggested in Figure 1 (at this level, we ignore the point mentioned in the figure). For example, is defined by the simplexes and . By Theorem 4.1,
The data to compute the modified Newton numbers and are given in Table 1. In this table, , , and , , are as above. Each pair in the third and fourth columns of the table consists of a simplex together with its volume. For example, in the first row of the third column, the pair consists of the simplex and its volume . The calculation shows that and , and therefore the Lê numbers are given by
6.3. Euler characteristic
Since the coordinates are prepolar for , Corollary 5.4 says that to calculate the reduced Euler characteristic of the Milnor fibre of at , it suffices to compute the special modified Newton number . Precisely, is given by
7. Proof of Theorem 4.1
Applying the Iomdine-Lê-Massey formula (see [12, Theorem 4.5]) successively to shows that for any :
-
(1)
in a neighbourhood of the origin;
-
(2)
;
-
(3)
the Lê numbers of at with respect to the rotated coordinates
exist for all and are given by
where is the th Lê number of at with respect to the rotated coordinates
and where is an integer satisfying
In particular (see [12, Corollary 4.6]) has an isolated singularity at and its Milnor number (which, in this case, coincides with its th Lê number ) is given by
| (7.1) |
Let be the subset of consisting of all indices for which does not meet the th coordinate axis of . Then, by [1, Lemmas 3.6–3.8 and Corollary 3.11] and [7, Théorème I], for any sufficiently large, the function
is non-degenerate, convenient, and the following equalities hold true:
| (7.2) |
The expression (7.1) for the Milnor number can be viewed as a polynomial in the variables . Its linear part is given by
| (7.3) |
Now we need the following lemma.
Lemma 7.1.
The function has no term of the form , where , .
We postpone the proof of this lemma to the end of this section, and we first complete the proof of Theorem 4.1.
Since has no term of the form , the Newton number can be viewed as a polynomial in the variables and . Its linear part with respect to has the form
| (7.4) |
where are polynomials in . Taking the difference gives a polynomial
in the variables . Then it follows from (7.2) that for any sufficiently large (equivalently, for any in the set which appears in Lemma A.1 of the appendix, with the appropriate coefficients and for ), we have
Thus applying Lemma A.1 shows that identically vanishes. In particular, comparing the coefficients of the linear parts (7.3) and (7.4) of and , respectively, shows that the polynomials are independent of (i.e., is constant) and are given by
Theorem 4.1 is now an immediate consequence of the following lemma.
Lemma 7.2.
For each non-empty subset , choose a simplicial decomposition
of as in Section 3.4 such that its restriction to coincides with the simplicial decomposition . (We can always achieve this condition by taking sufficiently large.) Write and set . Then the following equalities hold true:
To complete the proof of Theorem 4.1, it remains to prove Lemmas 7.1 and 7.2. We start with the proof of Lemma 7.2.
Proof of Lemma 7.2.
By (3.1) and (3.2), the Newton number is (up to coefficients of the form ) a sum of volumes of the form , where and is a simplex of with maximal dimension , plus the number
which corresponds to in the definition of (see Section 3.3). If for any the matrix used to compute the volume (see (3.3)) does not have any column of the form
then contributes to the term which appears in (7.4). (Here, the letter “” stands for the transposed matrix.) On the other hand, if it contains such a column for some , then necessarily the ’s are zero, and the column is of the form
(because intersects the th coordinate axis of precisely at the point by Lemma 7.1). If the matrix has two columns and of the above form, with and , then is not involved in the linear part (7.4) of . Now, if it has one column for some and no any other column for , then contributes to the term which appears in (7.4). Note that in the latter case, the matrix cannot have any column of the form with (as otherwise the constant polynomial would depend on ). Altogether, for any , the volume contributes to the term if and only if the corresponding matrix has a column of the form and no column of the form for any other . In other words, contributes to the term if and only if . Thus,
where denotes the reduced simplex associated to (see Section 3.4). Since is obtained from only by “adding” the vertices
(with at the th place) for large (), if a simplex of with maximal dimension is not a simplex of (in particular this is the case if ), then necessarily it intersects the th coordinate axis of for some (). It follows that
and hence,
Since the choice of is arbitrary and is a constant independent of , it follows that the modified Newton number is also independent of . The notation is therefore quite relevant.
Since the volume contributes to the term if and only if the simplex belongs to (we recall that is constant, independent of ), a similar argument shows that
Now we prove Lemma 7.1.
Proof of Lemma 7.1.
We argue by contradiction. Suppose that has a term of the form for some (). To simplify, without loss of generality, we may assume (the other cases are similar). By the Iomdine-Lê-Massey formula again and by Lemmas 3.7 and 3.8 of [1], for any sufficiently large (in particular so that ), the function
is non-degenerate and has an isolated singularity at . Then, by [1, Corollary 2.9], its support (denoted by ) satisfies so-called Kouchnirenko condition (see [8] or Section 2 of [1] for the definition; see also Section 3 of [14] and the references mentioned therein for equivalent formulations and historical comments). Now, since , the Newton diagrams of and of the function
coincide. It follows that is also non-degenerate and such that its support satisfies the Kouchnirenko condition. Theorem 3.1 of [1] then implies that has an isolated singularity at . If , then this is already a contradiction, because in this case . If , then define
Define similarly (replacing by ). Clearly, . Therefore, we have , but since has an isolated singularity at , we must also have , a new contradiction. ∎
8. Proof of Corollary 5.1
First, we show that . The argument is similar to that given in the proof of Lemma 7.1. We argue by contradiction. Put and , and suppose for instance . By the Iomdine-Lê-Massey formula and by Lemmas 3.7 and 3.8 of [1], for any integers sufficiently large222Precisely, ., the functions
are non-degenerate, has an isolated singularity at , and . Then, by [1, Corollary 2.9], the support of satisfies the Kouchnirenko condition. Since and have the same Newton diagram, it follows that too. Thus the support of also satisfies the Kouchnirenko condition, and by [1, Theorem 3.1], the function must have an isolated singularity at — a contradiction.
Now, to show that the Lê numbers of and at with respect to the coordinates are equal, we apply Theorem 4.1. By this theorem, these Lê numbers are described in terms of the modified (and special modified) Newton numbers of the functions and . Then the result follows immediately from the equality .
Appendix A
For completeness, in this appendix, we give a proof of a useful elementary lemma which we have used in the proof of Theorem 4.1.
Let be a positive integer. Consider the following system of integral inequalities with variables :
Here, is a constant, and for , is a number depending on . For each , let be the system consisting only of the first inequalities of the system . Finally, let be the set of (integral) solutions of the system .
Lemma A.1.
For any , if is a polynomial function that vanishes on , then it is identically zero.
Proof.
By induction on . For , the lemma immediately follows from the fundamental theorem of algebra. Now suppose the lemma holds true for some integer (with ), and let us show that it also holds true for the integer . So, let be a polynomial function such that for any . Note that implies . Expand with respect to the variable :
(Here, denotes the degree of .) Then for all ,
By the fundamental theorem of algebra, it follows that for each ,
for every fixed . Now, by the induction hypothesis, this implies that the polynomial identically vanishes. ∎
References
- [1] Sz. Brzostowski and G. Oleksik, On combinatorial criteria for non-degenerate singularities, Kodai Math. J. 39 (2016), 455–468.
- [2] J. Damon, Newton filtrations, monomial algebras and nonisolated and equivariant singularities, pp. 267–276 in Singularities, I (Arcata, CA, 1981), edited by P. Orlik, Proc. Sympos. Pure Math. 40, American Mathematical Society, Providence, RI, 1983.
- [3] A. Edmonds, Simplicial decompositions of convex polytopes, Pi Mu Epsilon J. 5 (1970), 124–128.
- [4] C. Eyral, Uniform stable radius, Lê numbers and topological triviality for line singularities, Pacific J. Math. 291 (2017), no. 2, 359–367.
- [5] J. Fernández de Bobadilla, Topological equisingularity of hypersurfaces with -dimensional critical set, Adv. Math. 248 (2013), 1199–1253.
- [6] T. Fukui, Łojasiewicz type inequalities and Newton diagrams, Proc. Amer. Math. Soc. 112 (1991), no. 4, 1169–1183.
- [7] A. G. Kouchnirenko, Polyèdres de Newton et nombres de Milnor, Invent. Math. 32 (1976), no. 1, 1–31.
- [8] A. G. Kouchnirenko, A criterion for the existence of a nondegenerate quasihomogeneous function with given weights, Uspekhi Mat. Nauk 32 (1977), no. 3 (195), 169–170 (in Russian).
- [9] D. B. Massey, The Lê-Ramanujam problem for hypersurfaces with one-dimensional singular sets, Math. Ann. 282 (1988), no. 1, 33–49.
- [10] D. B. Massey, The Lê varieties, I, Invent. Math. 99 (1990), no. 2, 357–376.
- [11] D. B. Massey, The Lê varieties, II, Invent. Math. 104 (1991), no. 1, 113–148.
- [12] D. B. Massey, Lê cycles and hypersurface singularities, Lecture Notes Math. 1615, Springer-Verlag, Berlin, 1995.
- [13] M. Morgado and M. Saia, On the Milnor fibre and Lê numbers of semi-weighted homogeneous arrangements, Bull. Braz. Math. Soc. (N.S.) 43 (2012), no. 4, 615–636.
-
[14]
G. Oleksik, On combinatorial criteria for isolated singularities, pp. 81–94 in Analytic and algebraic geometry, Faculty of Math. & Computer Sci., Univ. of Łódź, 2013.
Christophe Eyral
Institute of Mathematics, Polish Academy of Sciences
Śniadeckich 8, 00-656 Warszawa, Poland
E-mail: ch.eyral@impan.pl Grzegorz Oleksik
Faculty of Mathematics and Computer Science, University of Łódź
S. Banacha 22, 90-238 Łódź, Poland
E-mail: oleksig@math.uni.lodz.pl Adam Różycki
Faculty of Mathematics and Computer Science, University of Łódź
S. Banacha 22, 90-238 Łódź, Poland
E-mail: rozycki@math.uni.lodz.pl