La ecuación de Burgers como un paso previo al estudio de los fluidos incompresibles
Resumen
En este artículo se presentan las ecuaciones de Euler y de Navier-Stokes, las más básicas de las ecuaciones de los fluidos incompresibles, así como unos modelos simplificados de dichos problemas como pueden ser la ecuación quasigeostrófica u otros escalares activos. Las técnicas matemáticas para obtener que estas ecuaciones están bien puestas en el sentido de Hadamard y otras propiedades cualitativas (Principios del Máximo, formación de singularidades…) se ilustran en el caso sensiblemente más sencillo de la ecuación de Burgers con disipación no-local. Se adjunta una sección dedicada a los métodos numéricos usados para aproximar soluciones a estos problemas. Este trabajo tiene su origen en una serie de clases que impartimos en la escuela JAE-Intro del CSIC durante el verano del curso 2010-2011 y por lo tanto se centra en la popularización y divulgación de la física involucrada y en la explicación detallada de las ideas más abstractas en los argumentos puramente matemáticos.
Consejo Superior de Investigaciones Científicas
Instituto de Ciencias Matemáticas (CSIC-UAM-UC3M-UCM)
C/Nicolás Cabrera, 13-15,
Campus de Cantoblanco,
28049 - Madrid22footnotetext: Email: josemanuel.moreno@estudiante.uam.es
Universidad Autónoma de Madrid
Campus de Cantoblanco,
28049 - Madrid
Palabras clave: Ecuaciones de Euler, ecuaciones de Navier-Stokes, ecuación quasi-geostrófica, medios porosos, Ley de Darcy, interfase.
Agradecimientos: R.Granero está financiado por el proyecto MTM2008-03754 del Ministerio de Ciencia e Innovación (MICINN).
1 Introducción y motivación
El estudio de las ecuaciones de los fluidos incompresibles tiene cada vez un mayor interés, tanto desde el punto de vista más teórico (integrales singulares…) como desde el enfoque más aplicado (simulaciones numéricas…).
Las ecuaciones que aparecen modelizando problemas de mecánica de fluidos son variadas, pero las más importantes son las de Euler y Navier-Stokes. De hecho por demostrar (o refutar) la existencia global de solución clásica para Navier-Stokes el Instituto Clay otorga un premio de un millón de dólares.
Consideramos como dominio espacial el plano o el espacio enteros, con y exigimos que la velocidad del fluido sea cero en el infinito. Sea además el campo de velocidades inicial. Entonces las ecuaciones de Euler (1707-1783) para la velocidad de un fluido incompresible son
| (1) |
con y . Este sistema de ecuaciones es la segunda ley de Newton en el caso de un continuo de partículas.
Las ecuaciones de Navier (1785-1836) y Stokes (1819-1903) para un fluido incompresible con densidad son
| (2) |
donde .
En las ecuaciones de Navier-Stokes se ha añadido el rozamiento entre partículas del fluido modelizándolo con un laplaciano.
Observamos que es un sistema de evolución ’extraño’ en el sentido de que la derivada temporal de la presión no aparece. Eso nos indica que la presión se puede obtener de la velocidad . Para ver esto basta tomar la divergencia de la ecuación de conservación del momento,
Ahora podemos utilizar la función de Green para el Laplaciano (que para es conocida) y obtener . Tomamos el gradiente en esta expresión y obtenemos un sistema de ecuaciones no-locales cerrado para (donde ahora nos restringimos a velocidades incompresibles). Además hemos obtenido que la presión actúa como un multiplicador de Lagrange para la restricción . Los resultados de los que se dispone cierran la teoría en . En el plano se conoce la existencia global (en tiempo) de soluciones clásicas. Para el problema completo se tiene un teorema de existencia local (en tiempo) de solución clásica (ver [19]). Esta diferencia es porque las ecuaciones en los casos bidimensional y tridimensional son sensiblemente distintas. Para verlo necesitamos definir una cantidad que nos de información sobre cuánto ’gira’ el fluido. Esta cantidad que denotaremos se llama vorticidad y es el rotacional de la velocidad,
con el campo de velocidades del fluido. En concreto se tiene que las ecuaciones para la vorticidad son distintas: para un fluido no viscoso e incompresible111Estos fluidos se conocen como fluidos ideales., es decir, que sigue las ecuaciones de Euler, en el caso se tiene
| (3) |
que es una ecuación de transporte, mientras que en el caso se tienen las siguientes ecuaciones
| (4) |
En el caso de considerar un fluido viscoso se ha de añadir un término .
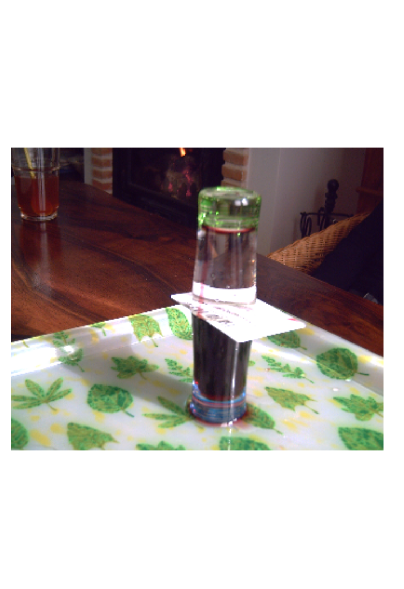
La diferencia entre ambos casos aparece también en las longitudes de onda que están íntimamente relacionadas con el fenómeno de la ’turbulencia’ (ver [13]). La turbulencia tiene como efecto principal facilitar que dos fluidos se mezclen, por lo tanto, llegados a este punto podemos ’experimentar’ un teorema. Para este pequeño juego necesitamos dos vasos pequeños llenos hasta arriba uno de ellos de agua y el otro de vino. La cuestión es: ¿cómo conseguimos cambiar los líquidos de vaso sin usar un tercer recipiente y sin que se mezclen? Para responder a esta pregunta hemos de conocer cómo es la turbulencia en tres dimensiones y qué diferencia hay con dos dimensiones. Así, si conseguimos una manera de reducir el problema tridimensional a uno bidimensional hemos acabado, porque en dos dimensiones ’no hay turbulencia’ y ésta es la culpable de que los líquidos se mezclen. Para conseguir esta reducción en las dimensiones lo que hacemos es tapar el vaso de agua con un carné y colocarlo con cuidado encima del vaso de vino. Si lo hemos hecho bien no se ha salido ni una gota. Ahora abrimos una rendija minúscula entre los vasos y el carné. El agua es más densa, por lo tanto comenzará a bajar mientras que el vino subirá…¡y todo esto sin mezclarse! (ver Figura 1)

Tras esta excursión por las ciencias experimentales volvamos a las matemáticas. La vorticidad es una cantidad que aparece en el conocido criterio de existencia global de Beale-Kato-Majda (ver [4]).
Teorema 1 (Beale-Kato-Majda).
Sean y dos constantes tales que
entonces una solución clásica de las ecuaciones de Euler (1) existe al menos hasta tiempo . Además, si es el tiempo máximo de existencia (es decir, aparece una singularidad), entonces
Este teorema nos dice que si controlamos ’lo que gira’ el fluido entonces no hay singularidades, por lo tanto conocer cómo se comporta la vorticidad es crucial para intentar entender qué hace el fluido. En efecto, también es interesante porque si la conocemos podemos recuperar la velocidad gracias a la fórmula de Biot-Savart (ver [3]). En el caso bidimensional la ley de Biot-Savart es
| (5) |
con
Ahora bien, con lo que acabamos de mencionar podemos ver que el problema de las ecuaciones de Euler (1) en el caso bidimensional podemos formularlo de manera equivalente como un ’escalar activo’, es decir, un escalar que es transportado por el fluido de manera que además podemos recuperar la velocidad del fluido si conocemos el escalar. En efecto: recordemos que teníamos la ecuación para la vorticidad (que en dos dimensiones es un escalar) (3), esto unido a cierra el problema para la vorticidad. Además si asumimos que nuestro dato inicial está acotado, usando el Teorema 1, tenemos que la solución clásica del sistema (1) existe globalmente.
El estudio matemático de los escalares activos tiene una gran relevancia en cuanto que son sistemas sencillos que conservan el carácter no local de un fluido incompresible. Además de que hay multitud de aplicaciones donde el problema físico se puede modelizar con un escalar activo. Por ejemplo tenemos el caso de la ecuación Quasigeostrófica (ver [5], [8], [16], [7] y las referencias allí expuestas) o de la Ley de Darcy (ver [10],[11], [12], [9], [1], [20]). La ecuación quasigeostrófica modeliza la evolución de la temperatura de grandes masas de aire en grandes escalas espaciales y es muy estudiada como modelo de la ’frontogénesis’ (la formación de frentes de aire a distinta temperatura). Este problema es de interés en meteorología, porque ya se sabe que
La falta de acierto de quienes predicen el tiempo se ha hecho ya proverbial, y sin embargo no hay ningún meteorólogo competente que no opine que los procesos atmosféricos están causalmente determinados.
Max Planck (extraído de [21])
La ecuación quasigeostrófica en dos dimensiones espaciales es
| (6) |
donde es la transformada de Riesz ésima (ver [22]) y es la temperatura del aire.
La Ley de Darcy modeliza un fluido incompresible que se mueve a bajas velocidades por un medio poroso. Así si es la densidad del fluido se tiene el problema
Este problema puede reducirse a un escalar activo tomando el rotacional dos veces en la ecuación, obteniendo
| (7) |
Podemos modelizar la transferencia de calor interno del fluido en un medio poroso con la misma ecuación (7) si a le damos el sentido de una temperatura (ver [2]). Por lo tanto, tanto en el caso de la ecuación (6) y de (7) puede interesarnos añadir un término de difusión del calor. Sin embargo estos términos de difusión no tienen por qué ser el típico laplaciano, puede ser necesario añadir una ’potencia fraccionaria del laplaciano’. El laplaciano en el espacio de Fourier (con variables ) tiene una expresión sencilla, es un multiplicador:
Podemos definir el operador de la siguiente manera
| (8) |
y equivalentemente
| (9) |
Notemos que también podemos escribir el resultado de aplicar el laplaciano fraccionario como la siguiente convolución:
| (10) |
donde es una constante de normalización. Los operadores (8) y (9) (o su versión (10)) son lo que nosotros entendemos por ’potencias fraccionarias del laplaciano’. Así las ecuaciones (6) y (7) con difusión no local son
| (11) |
y
| (12) |
Para irnos aproximando a estos problemas podemos plantearnos otros más sencillos o simplificados. Por ejemplo, consideremos un escalar activo
| (13) |
donde es un operador integral singular que además nos garantiza que . Queremos simplificar este problema de manera que sea fácilmente abordable, pero no tiene que estar tan simplificado que no nos de ninguna información. Lo primero que hacemos es reducir el número de variables espaciales a una, por lo tanto . Además podemos simplificar tomándolo igual a la identidad, es decir, pierde su carácter integral singular. La ecuación resultante de estas simplificaciones es la ecuación de Burgers viscosa si y la ecuación de Burgers no viscosa si (ver [17] y [14]):
| (14) |
Como la condición en una dimensión no tiene sentido físico (en una dimensión no hay choques) con esta ecuación tenemos un modelo unidimensional de las ecuaciones (1) y (2). Así nuestra ecuación (14) es el modelo más sencillo que nos da información tanto sobre las ecuaciones (1), (2) como (13).
Este texto está organizado de la siguiente manera: en la sección 2 probaremos la existencia local de solución clásica para toda la familia de ecuaciones (14). En la sección 3 obtendremos una ley de conservación y unos principios del máximo que se tienen para las soluciones clásicas de la ecuación (14). En la sección 4 daremos un criterio de existencia de solución clásica análogo al de Beale-Kato-Majda. En la sección 5 veremos que hay blow up para en (14) y en la sección 6 haremos simulaciones numéricas de la solución de (14).
2 Existencia local de la solución clásica
El problema que estudiaremos en esta sección y las siguientes es la ecuación (14) (donde cambiamos la notación por la más corriente ):
| (15) |
donde es el tiempo de existencia, y . Sobre el dato inicial impondremos las condiciones necesarias cuando veamos el teorema de existencia local, pero por el momento podemos suponer que . Nos restringiremos a las soluciones clásicas o soluciones fuertes. Este tipo de soluciones es tan suave como sea necesario para dar el sentido usual a las derivadas parciales que aparecen en la ecuación. Así para la ecuación de Burgers queremos que tenga al menos una derivada en y dos en . Es decir, queremos que .
En esta sección probaremos la existencia local de solución clásica para la ecuación (15) con y si el dato inicial está en un cierto espacio de funciones. Para ello utilizaremos el método de la energía de Leray (ver [19]). El argumento de Leray ya es un argumento clásico. Nosotros trataremos de aplicarlo con todo detalle en el ejemplo sencillo de la ecuación (15).
La idea del método es conseguir una sucesión de problemas regularizados para la ecuación (15). Para todos los problemas regularizados se demuestra la existencia utilizando el Teorema de Picard en un espacio de Banach adecuado. Se concluye el argumento observando que la familia de soluciones regularizadas forma una sucesión de Cauchy, y por lo tanto convergente en algún espacio. El espacio de Banach que vamos a usar es , porque utilizando la inmersión de Sobolev tenemos que entonces .
2.1 Estimaciones a priori
Para utilizar el método de Leray hemos de conseguir unas cotas a priori para ciertas cantidades. Es decir, suponiendo que hay solución.
Si pensamos en como en la velocidad de un fluido incompresible nos interesa conocer qué ocurre con la ’energía cinética’ del fluido, es decir, la norma de .
Proposición 1 (Principio del máximo para ).
Sea una solución clásica de (15). Entonces se tiene que:
-
a)
Si ,
-
b)
Si ,
Demostración.
Observamos que
De aquí se concluye la parte a) del resultado. Para obtener la parte b) hemos de utilizar el Teorema de Plancherel:
De esta última igualdad (que no es más que la prueba de que el operador es simétrico) se concluye el resultado. ∎
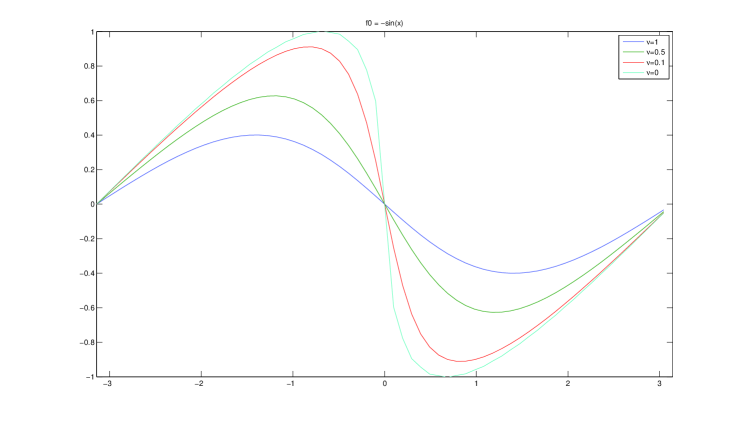
En el caso de que la solución no sea lo bastante regular como para ser solución clásica entonces la norma no se conserva. Esto en las ecuaciones de Euler es una serie de celebrados artículos (ver [18]). Las soluciones débiles de (1) en tres dimensiones o de (15) con no siempre tienen sentido físico. Lo que implica físicamente es que un fluido perfecto que estuviese inicialmente en reposo puede comenzar a agitarse a lo loco sin haber mediado fuerza externa alguna, siempre y cuyo la velocidad no tenga la suficiente regularidad como para ser solución clásica. Matemáticamente esta ’paradoja’ física se traduce en que no hay unicidad de soluciones débiles para el sistema de ecuaciones (1) en tres dimensiones. En el caso de (15) sin viscosidad () lo que ocurre es que se da un choque de curvas características y después no hay una manera única de continuar la solución. Enlaza esto con las condiciones de Rankine-Hugoniot y las soluciones de entropía (ver [15]). Además, si consideramos el problema viscoso
pero tomamos recuperamos la solución de entropía para la ecuación de Burgers no viscosa como límite, es decir, (ver Figura 2).
Ya tenemos una cota a priori para la norma . Como mencionamos antes queremos que nuestra solución esté en el espacio de Sobolev , por lo que sólo falta estimar la norma de .
Proposición 2.
Sea una solución clásica del problema (15) con un dato inicial . Entonces se tiene la siguiente cota
| (16) |
Demostración.
Se tiene que
por lo que hemos de derivar tres veces la ecuación (15), obteniendo
Introducimos esta expresión en nuestra expresión y logramos
Usando el Teorema de Plancherel se obtiene que
La segunda integral se anula por las condiciones de borde impuestas
Las integrales que faltan son las más singulares por tener el mayor número de derivadas, sin embargo sólo nos hemos de preocupar de , porque es igual. En efecto
Por lo tanto sólo hemos de acotar la integral . Se tiene que
y concluímos que
Usando la Proposición 1 obtenemos
Sin más que integrar la EDO se concluye la primera parte del resultado. ∎
Comentario 1 Es más, si , se tiene la siguiente cota
| (17) |
2.2 Regularización del problema
Consideremos una función , , y . Un ejemplo de tal puede ser la función
Ahora, para cualquier positivo, consideramos las funciones
| (18) |
Observamos que siguen teniendo las mismas propiedades que . Dada una función , si ahora hacemos la convolución , obtenemos que y, gracias a la desigualdad de Young:
| (19) |
tenemos que
Además . Pueden verse más propiedades de estos núcleos en [3].
El primer paso del método es regularizar el problema de manera que podamos demostar existencia de los problemas regularizados y también podamos usar las estimaciones a priori. Para ello utilizarmos la convolución con . Así consideramos la familia de problemas
| (20) |
Esta regularización particular se ha elegido pensando en obtener las mismas estimaciones de la Proposición 17. Por ser una función radial tenemos que
e integrando por partes tenemos unas estimaciones para como las de la Proposición 17.
Proposición 3.
Sea solución de (20) con dato inicial , . Entonces se tiene la siguiente cota
| (21) |
2.3 Existencia para los problemas regularizados
Para demostrar la existencia de los problemas regularizados (20) vamos a utilizar el teorema de Picard en el espacio . Hemos de ver entonces que para todo se tiene que
es localmente (es decir, si para cierto ) Lipschitz con respecto a la norma . Para empezar hemos de asegurarnos que no perdemos derivadas al aplicar . Esto se consigue porque en lugar de derivar derivamos el núcleo , de manera que no pierde derivadas. Veamos que es Lipschitz:
Lema 1.
Sea , entonces para todo es una función Lipschitz en con .
Demostración.
Se tiene que
Vamos a agrupar las partes difusivas de con la de :
Queda probar la estimación para la parte convectiva:
Utilizamos ahora que, si , es un álgebra de Banach, es decir, que se cumple
Gracias a esta propiedad de los espacios de Sobolev tenemos que
Para concluir hemos de elegir . ∎
Por lo tanto, dado un dato inicial , si aplicamos el Teorema de Picard tenemos que existe una sucesión . Además, por las propiedades de los núcleos , se puede demostrar que
Tenemos así el siguiente resultado:
Lema 2.
Dado una dato inicial con el problema (20) tiene una única solución .
2.4 Paso al límite
Veremos que forma una sucesión de Cauchy en el espacio , donde (ver Proposición 21). Para ello tenemos que ver que en es Cauchy y entonces utilizando las estimaciones de la Proposición 21 concluiremos que es una sucesión de Cauchy en con . El caso extremo de lo trataremos al final.
Lema 3.
es una sucesión de Cauchy en , con .
Demostración.
Veremos primero que es Cauchy en . Sean dos números positivos. Entonces se tiene
Veamos el caso de los operadores difusivos:
Integrando por partes el segundo sumando obtenemos que
y por lo tanto, usando las propiedades de las suavizaciones (ver [3])
Recordemos que, fijo , tenemos la cota uniforme y por lo tanto tenemos que
Para la integral se hace igual. Hay que sumar y restar los términos
y aplicar las mismas desigualdades (Sobolev, Cauchy-Schwartz…).
Además podemos mejorar el resultado para cubrir el caso extremo . Así hemos de ver que está en el espacio .222Podemos elegir la noción de límite de cualquier espacio con .
Lema 4.
La función definida como el límite anterior está en .
Demostración.
Para probarlo hemos de razonar con análisis funcional. Como está acotada en (Proposición 21) tiene una subsucesión que converge débilmente en este espacio. Es decir
En principio no podemos asegurar que . Para concluir la igualdad utilizamos las convergencias débiles, pues la convergencia fuerte implica la convergencia débil, en los espacios con además del hecho de que y obtenemos que si tenemos una contradicción. ∎
2.5 Regularidad de
Gracias a los lemas anteriores podemos demostrar el siguiente resultado:
Teorema 2 (Existencia local de solución clásica).
Sea , . Entonces existe una única , definida como el límite uniforme en compactos de de , solución clásica del problema (15) con y .
Demostración.
Existencia: De los lemas anteriores se obtiene la existencia de como límite uniforme en compactos de . Para obtener la regularidad temporal necesaria para observamos que tiende como distribución a la derivada débil de (que denotamos por ). En efecto, para toda función test , se tiene que
Además en (y por lo tanto también en sentido distribucional). Esto es una consecuencia de las propiedades de los núcleos suavizantes.
Ahora estamos en condiciones de conseguir una mejor estimación para :
En particular si con se concluye que es solución clásica de la ecuación de Burgers.
Para concluir que tenemos que obtener una cota para :
y entonces
donde en la última desigualdad hemos usado (17).
Unicidad: Supongamos que hubiese dos soluciones, y en el espacio con del problema (15) con el mismo dato inicial. Entonces
y usando Gronwall se obtiene la unicidad. ∎
3 Propiedades de las soluciones
En esta sección encontraremos algunas propiedades básicas que deberá tener una solución de la ecuación de Burgers.
Como la ecuación (15) modeliza un escalar que es transportado por un fluido donde la velocidad del fluido la hemos hecho proporcional al escalar (14) es de esperar que la masa total, i.e. se conserva. En efecto,
Proposición 4 (Conservación de la masa).
Sea una solución clásica de la ecuación (15) entonces se tiene que
Demostración.
Para ver que la integral se anula razonamos utilizando la transformada de Fourier. Dada un función se cumple que
Como en el espacio de Fourier es el multiplicador de la definición (9) obtenemos que
∎
Otra cantidad de la que es interesante ver la evolución es la norma de la solución:
Proposición 5 (Principio del máximo para ).
Sea una solucion clásica de (15) tal que , y , entonces se tienen los siguientes resultados
-
a)
Si ,
-
b)
Si ,
Demostración.
Observamos que la función es Lipschitz. En efecto:
de donde
| (22) |
Para concluir que la función es Lipschitz observamos que debemos restringirnos a un intervalo temporal con fijo. Ahora nos aseguramos de que y obtenemos
Usando el Teorema de Radamacher tenemos que es derivable en casi todo punto,
De manera que, si ,
donde en la última igualdad hemos usado que es máximo. En el caso en el que tenemos que dar signo al término . Usaremos la expresión como una convolución (10). Se tiene que
En el caso en el que el resultado se reduce a conocer qué signo tiene la segunda derivada en un punto de máximo.
Para el mínimo se hace de manera análoga. ∎
4 Un resultado análogo al de Beale-Kato-Majda
El lector atento se habrá percatado de que la ecuación de Burgers (15) tiene una especie de Teorema de Beale-Kato-Majda. Recordemos que en una dimensión espacial lo más parecido a es la primera derivada espacial . Entonces tenemos el siguiente resultado:
Proposición 6.
Demostración.
En la prueba de la proposición de las estimaciones a priori (Proposición 17) logramos la cota
De esta expresión obtenemos
y aplicando la desigualdad de Gronwall (es decir, integramos la EDO) conseguimos el resultado. ∎
5 Buscando singularidades
Consideramos la ecuación (15) con . Esta ecuación es una ecuación de transporte unidimensional no-lineal, por lo tanto es susceptible de aplicarle el método de las características. Esa técnica aplicada a esta ecuación se puede encontrar en casi todos los manuales de ecuaciones diferenciales. Nosotros utilizaremos una técnica similar a la que utilizamos para probar el Principio del Máximo en la sección 2. Queremos encontrar una singularidad para . Por la Proposición 5 tenemos que no explota, por lo tanto si hay una singularidad debe estar en alguna de las derivadas espaciales de . Como estamos en el caso no viscoso solamente tenemos una derivada espacial, así que es nuestra candidata a cantidad que explota.
Así sea una solución clásica de (15). Por la inmersión de Sobolev se tiene que . Ahora la idea es aplicar el Teorema de Rademacher a . De manera análoga a la de la demostración de la Proposición 5 se demuestra que si se tiene que
Como es el punto de máximo de tenemos que , por lo que la ecuación para la evolución del máximo es
Si ahora resolvemos la EDO obtenemos que
| (23) |
Hemos obtenido el siguiente resultado
Proposición 7 (Singularidad).
Sea tal que . Entonces solución clásica de (15) con desarrolla una singularidad en tiempo finito.
5.1 Interpretando la singularidad
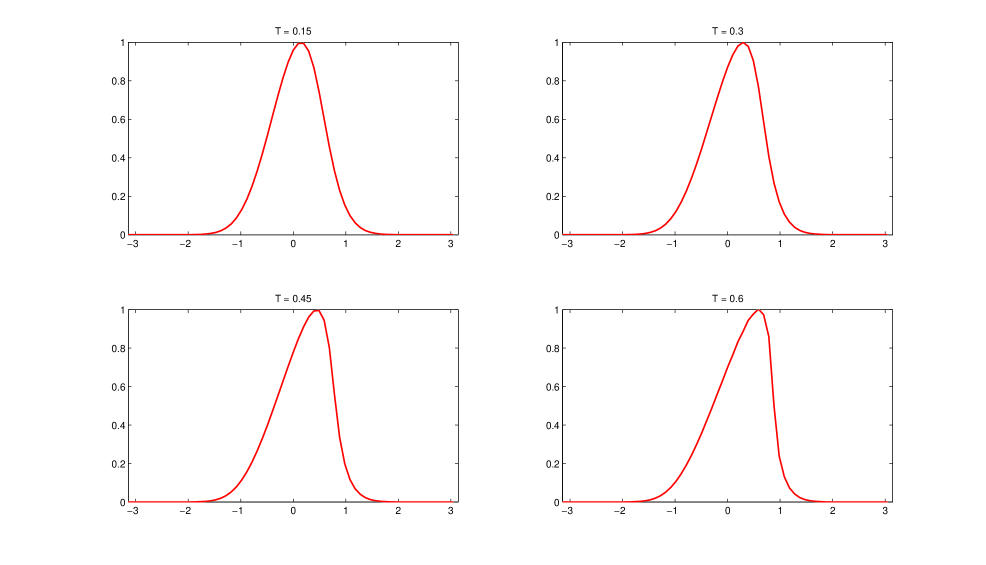
El tipo de singularidad que se produce se conoce como ’choque’333Del inglés ’shock’. y es una discontinuidad en , o lo que es lo mismo . Si pensamos en como la altura de la superficie de una ola unidimensional lo que ocurre es que las partículas del fluido que integran la ola se mueven más rápido cuanto más altas estén, por lo que las más altas van a acercarse a las más bajas. Entonces cuando las alcancen se produce este choque. Esta discontinuidad previene que nuestra interfase deje de ser un grafo, porque si pensamos en la física de la ola tenemos que las partículas más rápidas sobrepasan a las más lentas (ver Figura 3).
Hemos mencionado que la ecuación de Burgers podía ser entendida como una ola, lo que no es completamente descabellado.
Si es la superficie del agua (entonces la ola viene dada por la curva ), y es el campo de velocidades del agua, entonces la ecuación de la interfase entre el agua y el aire es
Ahora observamos que en las olas la parte más alta se mueve a mayor velocidad que la parte más baja. Por lo tanto parece natural (al menos como primera aproximación) hacer la hipótesis (la constante podemos tomarla igual a 1 si hacemos un cambio de variables). Así si despreciamos la velocidad vertical, , tenemos la ecuación de Burgers no viscosa como modelo del perfil de una ola. Podemos razonar también que la curva cambia según sea su curvatura, de manera que con la curvatura de la curva . Además si suponemos curvas suaves de amplitud pequeña podemos linealizar la curvatura obteniendo el operador . Así, con hipótesis razonables al menos en primera aproximación, obtenemos la ecuación de Burgers viscosa como modelo simplificado del perfil de una ola.
Una ola unidimensional con unas ciertas características (longitud de onda, amplitud…) puede modelizarse en un mejor nivel de aproximación con la ecuación KdV siguiente:
| (24) |
Veamos de manera muy resumida cómo puede derivarse formalmente esta ecuación. Para describir una ola consideramos que el agua bajo la superfie tiene un flujo irrotacional, para cierta función escalar . Si suponemos válidas las ecuaciones de Euler para el agua bajo la superficie tenemos que sigue la ley
Además, por la incompresibilidad se tiene .
La coordenada se distingue de la en que actúa la gravedad, por lo tanto parece natural hacer un desarrollo de en potencias de , . Si consideramos olas pequeñas en amplitud con respecto a la longitud de onda, entonces tenemos que despreciar los términos de orden grande en en nuestra expresión para .
Si además suponemos que podemos concluir la ecuación (24). Esta hipótesis se motiva por los desarrollos en serie de potencias anteriores.
Observamos que la hipótesis para obtener la ecuación de Korteveg-de Vries es menos restrictiva que para obtener la ecuación de Burgers, pues exclusivamente suponemos que no que . Consideramos por lo tanto discrepancias en los ordenes mayores.
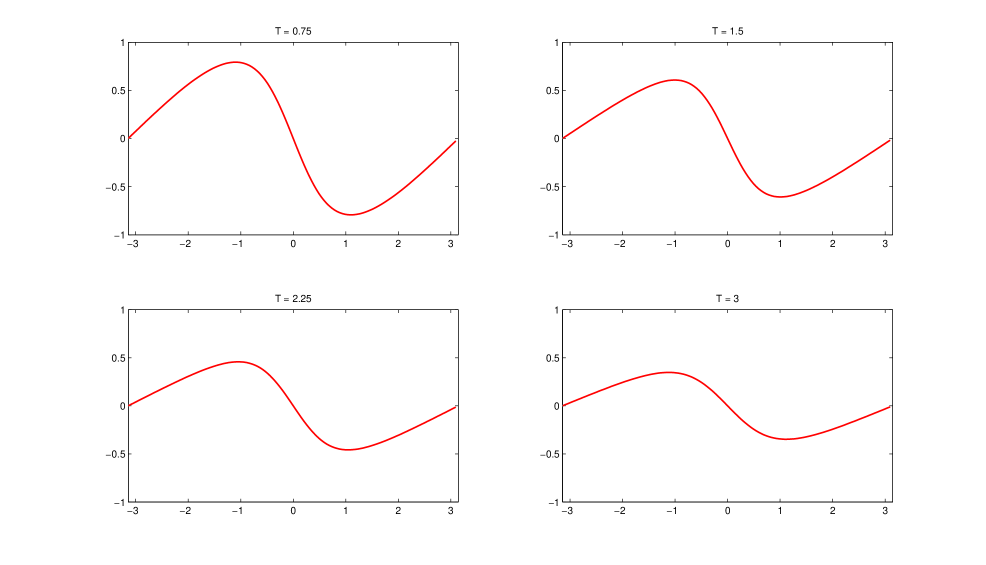
6 Método numérico
En la siguiente sección nos proponemos dar una aproximación numérica al problema (14) propuesto en .
6.1 Discretización espacial
La forma natural de abordar el problema es usando la transformada de Fourier discreta (DFT) (ver [6] y [23]). Sea una discretización de , con un número par de puntos, dada por,
La idea es sustituir el valor de en los nodos, , por su interpolante trigonométrico,
Es decir, dado un vector con los valores nodales de , , la DFT nos proporciona . Estos coeficientes vienen dados por,
y puede demostrarse que están relacionados con los coeficientes de la serie de Fourier de mediante,
Sabiendo como aproximar , es importante saber como aproximar . Para ello derivamos el interpolante trigonométrico anterior obteniendo,
Nuestra aproximación de en vendrá dada por lo que nosotros llamaremos,
De la misma forma, parece apropiado aproximar el operador mediante,
6.2 Discretización temporal
Para la aproximación de la derivada temporal en la ecuación utilizaremos el método de Runge-Kutta explícito de orden , también denominado RK4.
Sea una discretización del dominio temporal . Así si es la aproximación de la solución a nuestro problema en tiempo se tiene que verifica la ecuación
con .
Entonces,
donde,
|
Referencias
- [1] J. Bear, Dynamics of Fluids in Porous Media, American Elsevier, New York, 1972.
- [2] A. Bejan y D. Nield, Convection in Porous Media, Springer, New York, 1992.
- [3] A.L. Bertozzi y A.J. Majda. Vorticity and the Mathematical Theory of Incompresible Fluid Flow. Cambridge Press, 2002.
- [4] J.T. Beale, T. Kato y A. Majda Remarks on the breakdown of smooth solutions for the 3-D Euler equations. Comm. Math. Phys. 94, no. 1, 61-66, 1984.
- [5] L. Cafarelli y A. Vasseur. Drift diffusion with fractional diffusion y de quasi-geostrophic equation. To appear in Annals of Mathematics,
- [6] C. Canuto, M.Y. Hussaini, A. Quarteroni, T.A. Zang, Spectral Methods, Springer-Verlag, 2006
- [7] P. Constantin, D. Córdoba y J. Wu, On the critical dissipative quasigeostrophic equation, Indiana Univ. Math., 50, 97-107, 2001.
- [8] A. Córdoba y D. Córdoba, A maximum principle applied to Quasi-geostrophic equations, Comm. Math. Phys. 249, no. 3, 511-528, 2004.
- [9] A. Córdoba, D. Córdoba y F. Gancedo, Interface evolution: the Hele-Shaw y Muskat problems. To appear in Annals of Math.
- [10] D. Córdoba y F. Gancedo, Contour dynamics of incompressible 3-D fluids in a porous medium with different densities. Comm. Math. Phys. 273 (2007), no. 2, 445–471.
- [11] D. Córdoba y F. Gancedo, A maximum principle for the Muskat problem for fluids with different densities. Comm. Math. Phys. 286 (2009), no. 2, 681–696.
- [12] D. Córdoba, F. Gancedo y R. Orive, A note on the interface dynamics for convection in porous media. Physica D 237 (10-12), (2008), pp. 1488–1497.
- [13] C.R. Doering y J.D. Gibbon Applied Analysis of the Navier-Stokes Equations, Cambridge text in applied mathematics.
- [14] H. Dong, D. Du, y D. Li,. Finite time singularities and global well-posedness for fractal Burgers equations. Indiana University Math. J., Vol 58, No.2, 807–821, 2009.
- [15] L.C. Evans, Partial Diferential Equations, AMS, 2008.
- [16] F. Gancedo. Existence for the -patch model and the QG sharp front in Sobolev spaces. Adv. Math., Vol 217/6: 2569-2598, 2008.
- [17] A. Kiselev, F. Nazarov, y R. Shterenberg,. Blow up and regularity for fractal Burgers equation. Partial Differ. Equ., Vol 5, 211–240, 2008.
- [18] C. De Lellis y L. Székelyhidi Jr. The Euler equations as a differential inclusion. Ann. Math., Vol 170, 3, 1417-1436, 2009.
- [19] J. Leray. Sur le mouvement d’un liquide viscoux emplissant l’espace. Acta. Math., Vol 63,No.1,193-248, 1934.
- [20] M. Muskat, The flow of homogeneous fluids through porous media. New York, 1937.
- [21] M. Planck Autobiografía científica y últimos escritos, Nivola, 2000.
- [22] E.M. Stein Singular integrals y differentiability properties of functions, Princeton University Press, 1970.
- [23] L.N. Trefethen Spectral methods in Matlab, SIAM, 2000.