LIE ALGEBRAS ASSOCIATED WITH LABELED DIRECTED GRAPHS
Abstract.
We present a construction of 2-step nilpotent Lie algebras using labeled directed simple graphs, which allows us to give a criterion to detect certain ideals and subalgebras by finding special subgraphs. We prove that if a label occurs only once, then reversing the orientation of that edge leads to an isomorphic Lie algebra. As a consequence, if every edge is labeled differently, the Lie algebra depends only on the underlying undirected graph. In addition, we construct the labeled directed graphs of all 2-step nilpotent Lie algebras of dimension and we compute the algebra of strata preserving derivations of the Lie algebra associated with the complete bipartite graph with two different labelings.
Key words and phrases:
2-step nilpotent Lie algebras, labeled directed graph, ideals, degree preserving derivations, complete bipartite graphs.2010 Mathematics Subject Classification:
17B30; 17B40; 05C20; 05C251. Introduction
Nilpotent Lie algebras have been an important object of study in many areas of mathematics, such as geometric analysis, representation theory and control theory for many years, for example see [1, 4, 5, 16, 19, 22]. In particular, nilpotent Lie algebras of step 2 have attracted much interest for some time, not only because they are the simplest ones in most senses, but due to several close connections with Clifford algebras, dynamics and differential geometry [12, 13, 14, 15, 17, 18].
In 2005, S. G. Dani and M. G. Mainkar [10] proposed a method for constructing 2-step nilpotent Lie algebras using graphs in a very natural manner. This construction is sufficiently rigid so that one can prove very interesting results relating the combinatorial structure of the graph and the algebraic structure of the Lie algebra, for example see [2] for a deep connection with the notion of degeneration. Moreover, this point of view has been generalized by A. Ray in [26] in a very original manner to certain 3-step nilpotent Lie algebras.
In the present paper, we develop further the construction of the 2-step nilpotent Lie algebra structures associated to labeled directed graphs introduced in [6]. This construction is a generalization from the one presented in [10]. From the definition of the associated Lie bracket, the structure constants are and in an appropriate basis. Examples of these Lie algebras are very important in geometric analysis, see [9, 15], since by a well-known result by Mal’cev if a real or complex Lie algebra admits a basis with respect to which the structure constants are rational, then the unique connected and simply connected Lie group that has as its Lie algebra has a lattice, that is, a discrete co-compact subgroup, see [8, 21]. These objects provide natural settings for the study of compact nilmanifolds, such as in [3].
The structure of the paper is the following. We present the construction of the 2-step nilpotent Lie algebra associated to a labeled directed graph in Section 2. Afterward, in Section 3, we prove a combinatorial relation between certain special subgraphs and subalgebras and ideals of the corresponding Lie algebra. In Section 4, we summarize explicitly some of the ideals and subalgebras presented in the previous section in all 2-step nilpotent Lie algebras of dimensions 4, 5 and 6, according to the classification in [20]. We conclude the paper with Section 5, in which we use the combinatorial description of certain Lie algebras associated to complete bipartite graphs to study the structure of the algebra of strata preserving derivations in these examples.
2. Constructing a Lie algebra from a labeled directed graph
A finite directed graph consists of a finite set of vertices and a finite set of directed edges. We say that is simple if the underlying undirected graph is simple, that is, it has neither loops nor multiple edges.
The directed graphs we will be interested in this paper are edge-labeled, that is, given a finite simple directed graph we will consider a labeling function
where is the set of labels. We denote the label of edge by .
Definition 2.1.
Given a finite simple directed graph with a surjective labeling function , we will denote it by and call it a labeled directed graph.
Given a labeled directed graph , we can associate to it a finite dimensional 2-step nilpotent Lie algebra over a field of characteristic by means of the following procedure:
-
•
as a vector space.
-
•
Define the Lie bracket on the basis as follows
and then extend it linearly. For the rest of the paper, the indices correspond to vertices and correspond to labels.
Taking into account the fact that is simple, this definition includes the identity needed for Lie algebras over fields of characteristic 2. In all other characteristics, this is equivalent to the skew-symmetry of the Lie bracket. Note that the Jacobi identity is satisfied trivially. We consider only fields of characteristic different from 2 due to technical reasons in some of the proofs below.
According to the construction described before, these algebras are naturally stratified, that is, they admit a grading
for which . In the cases and , Lie algebras satisfying this condition are particularly important, either for geometric, algebraic or analytic reasons, for example, see [4, 24, 29].
From the definition of , with respect to the basis the structure constants are and . As mentioned in the introduction, in the real and complex cases, these Lie algebras admit a lattice. Moreover, given such an algebra with a basis as before, then one can easily construct an appropriate labeled directed graph.
Remark 2.2.
The real Lie algebra in [27] with irrational, is an example of a -step nilpotent Lie algebra cannot be obtained from a labeled directed graph because its structure constants are not rational in any basis.
Example 2.3.
Consider the labeled directed graph
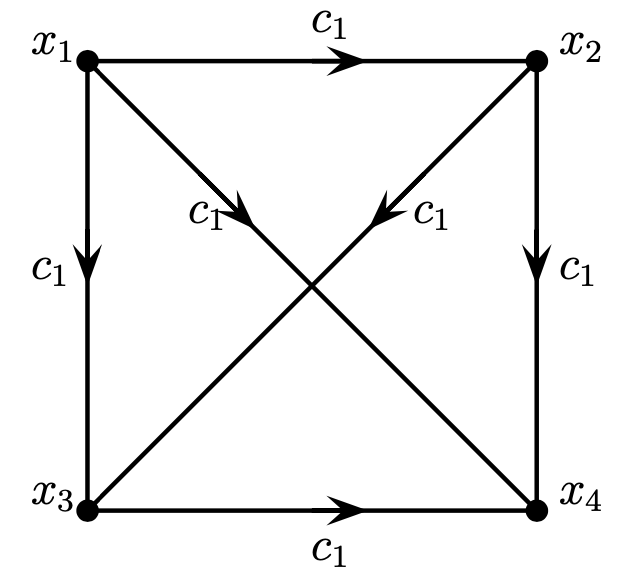
According to the construction, this graph corresponds to the 5-dimensional 2-step nilpotent Lie algebra with non-trivial Lie brackets
It is important to observe that, in fact, this Lie algebra is isomorphic to the Lie algebra in [20], which corresponds to the graph
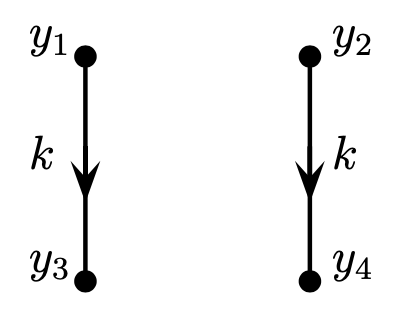
This graph will appear again in this paper in Table 1, when listing the graphs of all low-dimensional real nilpotent Lie algebras. An explicit graded isomorphism is given in the bases by
3. Graph-ideals of
In this section we will study how certain aspects of the combinatorics of the graph are related to the algebraic structure of the Lie algebra . In order to proceed initially, we need to recall a couple of concepts of graph theory.
Definition 3.1.
Assume the vertices of an undirected graph are numbered as .
-
•
The adjacency matrix, given by
where if and are connected, and otherwise.
-
•
The valency matrix, given by
is a diagonal matrix, where the diagonal entry corresponds to the degree of the vertex , that is, the number of vertices connected to .
-
•
The Laplacian matrix is the difference .
Following well-known results in spectral graph theory, the first natural question to ask concerns the connectedness of the graph (see [7]).
Proposition 3.2.
Let be a stratified 2-step nilpotent Lie algebra admitting a stratified basis with structure constants and . The associated labeled directed graph has connected components.
Proof.
The connected components of a graph are in one-to-one correspondence with the linearly independent eigenvectors of with eigenvalue zero (see [23]).
The Laplacian matrix can be easily found from , since the adjacency matrix of the graph can be directly found from the structure constants of , forgetting the signs. The result follows. ∎
We study the relation between certain special subgraphs of and the subalgebras and ideals of . Note that any vector subspace of is an ideal of , in particular, the algebra is not simple.
Definition 3.3.
The following subalgebras and ideals of are considered trivial:
-
•
The Lie algebra .
-
•
Vector subspaces of .
-
•
Abelian factors, that is, spanned by disconnected single vertices in .
Recall that a subgraph of a directed graph is induced if it is formed from a subset of the vertices of and all of the edges of connecting pairs of vertices in that subset.
Proposition 3.4.
Let be a labeled directed graph and a induced subgraph of . Then
-
(1)
is a subalgebra of
-
(2)
If for each pair of adjacent vertices of we have or is a label of , then is an ideal of .
Proof.
-
(1)
Let be two connected vertices in . If is a induced subgraph, then and
-
(2)
We need to prove that if is a vertex of and is a vertex of , then
-
•
If are not adjacent, then
-
•
If are adjacent, then
Therefore, is an ideal of ∎
-
•
For the rest of the paper we will refer to the ideals in point above as graph-ideals.
Corollary 3.5.
Let be a labeled graph and a connected component of . Then is a graph-ideal of
The following technical lemma gives a condition under which a change of the direction of a single directed edge of leads to isomorphic Lie algebras. Recall that the neighborhood of a vertex of a directed graph is the set of all vertices of connected to or from .
Lemma 3.6.
Let be a labeled directed graph and the graph obtained changing the direction of an edge . Assume the edge is the only edge with label . Then is isomorphic to
Proof.
Define by
Consider the function by
and
We need to prove that .
- Case 1:
-
and
Let Then and
- Case 2:
-
and .
In this case
and
- Case 3:
-
and
In this case and
We conclude that is an isomorphism. ∎
Remark 3.7.
Notice that if there is another edge in with the same label as the edge , then the previous proof does not work. As can be easily seen from Example 2.3, this is by no means a sufficient condition.
Corollary 3.8.
Let be a labeled directed graph such that each appears at most once in each connected component of Let be the graph obtained inverting the direction of all the edges with the same label simultaneously. Then
Proof.
Define as before in each connected component of ∎
The following is the main theorem of this paper. We use inductively the technical Lemma 3.6 to find a general criterion to perform direction changes and obtain isomorphic Lie algebras.
Theorem 3.9.
Let be a labeled directed and connected graph such that , that is, each edge is uniquely labeled. Let be the labeled directed graph obtained by changing the direction of any subset of edges in Then
Proof.
Enumerate the edges that change direction by
For define inductively by and as the graph obtained by changing the direction of in Using the Proposition 3.6 we have and by construction
We conclude that ∎
This theorem connects our construction to the one in [10]. Since in that reference all labels are considered different, then the Lie algebras are defined regardless of the direction of the edges of the graph.
Example 3.10.
The Lie algebras associated to the complete graphs , with different labels correspond to the free 2-step nilpotent Lie algebras generated by elements. See [25].
4. Graphs for Magnin’s classification and their graph-ideals
In [20] it is possible to find a careful description of all real nilpotent Lie algebras of dimensions and a classification of certain nilpotent algebras of dimension 7. The classification of real nilpotent algebras is still undergoing active research.
Applying directly the results from the previous section, we can present complete tables for the graphs of the 2-step nilpotent real Lie algebras shown in [20] in dimension. For the sake of clarity, we divide this classification in dimensions 4 and 5, and dimension 6.
For brevity, we will not include as separate cases the inclusion of Abelian factors of , that is, those Abelian factors coming from disconnected vertices.
For the sake of notation, we denote by the 3-dimensional Heisenberg Lie algebra and by the 1-dimensional Abelian Lie algebra. The Lie algebras and in Table 1 appear named as such in [20].
| Dimension | Lie algebra | Graph | Subalgebras | Graph-ideals |
|---|---|---|---|---|
| 4 |
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/hxg1.png)
|
|||
| 5 |
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g51.png)
|
|||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g52.png)
|
— | |||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/hxg12.png)
|
The Lie algebras , and in Table 2 only appear listed in [20], and we named them as such to make both tables coherent. The Lie algebra does not exactly fit our theory, since it corresponds to a family of Lie algebras depending on a parameter and not a square. As such, we do not mention either subalgebras nor graph-ideals, but we add it to the table for completeness.
| Lie algebra | Graph | Subalgebras | Graph-ideals |
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g61.png)
|
— | ||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g62.png)
|
|||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g63.png)
|
— | — | |
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/hh.png)
|
|||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/hg13.png)
|
|||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g51g1.png)
|
|||
![[Uncaptioned image]](https://cdn.awesomepapers.org/papers/8a52b5b7-748a-4f00-b109-0332f7c8045d/g52g1.png)
|
5. The algebra of graded derivations for
When studying Lie algebras in different contexts, it is common to ask oneself firstly about isomorphisms, and immediately after about derivations. If the Lie algebra being studied is graded, then the natural question is to try to compute the space of graded derivations . In this section, we present some computations associated to the complete bipartite graph . As it will be mentioned a the end of this section, this space is related to infinitesimal symmetries in the case of real and complex Lie algebras, according to the theory of Tanaka prolongation, see [28].
Recall that the complete bipartite graph is the undirected graph in which all vertices from the set are connected to all vertices from the set . As such, the set is the disjoint union of and , and contains edges.
In what follows, we will direct all edges going from to . In subsection 5.2, this orientation is irrelevant, according to Theorem 3.9.
5.1. Labeling with a single label
Let be the complete bipartite graph with edges
and labeled by a unique label . As before, recall that is naturally stratified as , where and .
In order to study the space of graded derivations of the Lie algebra associated to , it is convenient to think of an element as a matrix in the obvious basis, namely
where we have the linear maps
and is a scalar.
Proposition 5.1.
The dimension of is
Proof.
Let . Then there are constants (where and ), such that
Thus, for and , we have
As a consequence, we have the following homogeneous system
of independent linear equations. Considering the following simple computation
we conclude with the expected result. ∎
5.2. Labeling with different labels
Let be the complete bipartite graph with edges
and labeled by the set . We will consider that all labels are different, that is, we assume has elements. Once again, we stratify as , where and .
As in the previous subsection, we write an element as a matrix in the obvious basis, namely
where we have the linear maps
Proposition 5.2.
The dimension of is .
Proof.
Let . Then there are constants (where and ), such that
Thus, for and , we have
If , then the first equality reduces to
that is, it is satisfied trivially for any .
On the other hand, if then and as is a linearly independent set, then for all and Similarly, we obtain for all and
Note that
and we have linearly independent equations. The result follows. ∎
Remark 5.3.
For a real or complex stratified Lie algebra , there is an important object called its Tanaka prolongation
which helps computing infinitesimal symmetries of certain differential systems, see [28]. Each of the subspaces for can be computed explicitly using a simple induction procedure. In particular, it follows directly from the construction that
This equality has been successfully in [29] to completely characterize the Tanaka prolongations of free Lie algebras.
6. Acknowledgments
The second author would like to thank professor María Alejandra Álvarez from Universidad de Antofagasta, Chile, for her hospitality and her comments regarding earlier versions of this paper. Both authors would like to thank professor Andrew Clarke from Universidade Federal do Rio de Janeiro, Brazil, for his hospitality.
References
- [1] Agrachev, Andrei; Barilari, Davide; Boscain, Ugo. A comprehensive introduction to sub-Riemannian geometry. From the Hamiltonian viewpoint. With an appendix by Igor Zelenko. Cambridge Studies in Advanced Mathematics, 181. Cambridge University Press, Cambridge, 2020.
- [2] Alfaro Arancibia, B.; Alvarez, M. A.; Anza, Y. Degenerations of graph Lie algebras. Linear Multilinear Algebra 70 (2022), no. 1, 91–100.
- [3] W. Bauer, K. Furutani, C. Iwasaki, A. Laaroussi, Spectral theory of a class of nilmanifolds attached to Clifford modules. Mathematische Zeitschrift, volume 297, pages 557–583 (2021)
- [4] A. Bonfiglioli, E. Lanconelli and F. Uguzzoni. Stratified Lie groups and potential theory for their sub-Laplacians. Springer Monogr. Math. Springer, Berlin, 2007.
- [5] Čap, A., Slovak, J. Parabolic geometries. I. Background and general theory. Mathematical Surveys and Monographs, 154. American Mathematical Society, Providence, RI, 2009.
- [6] D. Chakrabarti, M. Mainkar, S. Swiatlowski, Automorphism groups of nilpotent Lie algebras associated to certain graphs. Comm. Algebra 48 (2020), no. 1, 263–273.
- [7] F. Chung. Spectral Graph Theory. American Mathematical Society (1997).
- [8] L. J. Corwin, F. P. Greenleaf, Representations of nilpotent Lie groups and their applications. Part I. Cambridge Stud. Adv. Math., 18, 1990,
- [9] G. Crandall, J. Dodziuk, Integral structures on H-type Lie algebras. J. Lie Theory 12 (2002), no.1, 69–79.
- [10] S. G. Dani and M. G. Mainkar. Anosov automorphisms on compact nilmanifolds associated with graphs. Trans. Amer. Math. Soc., vol. 357, no. 6, 2235–2251, 2005.
- [11] R. DeCoste, L. DeMeyer, M. Mainkar and A. Ray. Abelian factors in 2-step nilpotent Lie algebras constructefd from graphs. Comm. Algebra, vol. 51, no. 5, pp. 2155–2175, 2023.
- [12] P. Eberlein. Geometry of 2-step nilpotent groups with a left invariant metric. Ann. Sci. École Norm. Sup. (4), vol. 27, no. 5, pp. 611–660, 1994.
- [13] P. Eberlein. Geometry of 2-step nilpotent groups with a left invariant metric. II. Trans. Amer. Math. Soc., vol. 343, no. 2, pp. 805–828, 1994.
- [14] K. Furutani, M. Godoy Molina, I. Markina, T. Morimoto and A. Vasilev. Lie algebras attached to Clifford modules and simple graded Lie algebras. J. Lie Theory 28 (2018), no. 3, 843–864.
- [15] K. Furutani and I. Markina. Complete classification of pseudo H-type Lie algebras: I. Geom. Dedicata, vol. 190, pp. 23–51, 2017.
- [16] V. Jurdjevic. Geometric control theory. Cambridge Studies in Advanced Mathematics, 52. Cambridge University Press, Cambridge, 1997.
- [17] A. Kaplan. Fundamental solutions for a class of hypoelliptic PDE generated by composition of quadratic forms. Trans. Amer. Math., vol. 258, no. 1, pp. 147–153, 1980.
- [18] A. Kaplan. Riemannian nilmanifolds attached to Clifford modules. Geom. Dedicata, vol. 11, no. 2, pp. 127–136, 1981.
- [19] A. Kushner, V. Lychagin and V. Rubtsov. Contact geometry and non-linear differential equations. Encyclopedia of Mathematics and its Applications, 101. Cambridge University Press, Cambridge, 2007.
- [20] L. Magnin. Sur les algèbres de Lie nilpotentes de dimension . Journal of Geometry and Physics, vol. 3, no. 1, 1986.
- [21] A.I. Malcev, On a class of homogeneous spaces, Amer. Math. Soc. Translation, no. 39, 1951.
- [22] R. Montgomery. A tour of subriemannian geometries, their geodesics and applications. Mathematical Surveys and Monographs, 91. American Mathematical Society, Providence, RI, 2002.
- [23] B. Nica, A Brief Introduction to Spectral Graph Theory. EMS Textbooks in Mathematics (2018).
- [24] S. Nicolussi, A. Ottazzi, Polarised Lie groups contactomorphic to stratified groups. arXiv:1807.03854.
- [25] C. Reutenauer. Free Lie algebras. Handbook of algebra, Vol. 3, 887–903, Handb. Algebr., 3, Elsevier/North-Holland, Amsterdam, 2003.
- [26] A. Ray. Two-step and three-step nilpotent Lie algebras costructed from Schreier graphs. J. Pure Appl. Algebra, vol. 28, no. 2, pp. 479–495, 2016.
- [27] J. Scheuneman. Two-step nilpotent Lie algebras. J. Algebra, vol. 7, pp. 152–-159, 1967.
- [28] N. Tanaka. On differential systems, graded Lie algebras and pseudogroups. J. Math. Kyoto Univ. 10, (1970), 1–82
- [29] B. Warhurst. Tanaka prolongation of free Lie algebras. Geom. Dedicata 130 (2007), 59–69.