Local gaps in three-dimensional periodic media
Abstract
We consider the propagation of acoustic waves in a medium with a periodic array of small inclusions of arbitrary shape. The inclusion size is much smaller than the array period. We show that global gaps do not exist if is small enough. The notion of local gaps which depends on the choice of the wave vector is introduced and studied. We determine analytically the location of local gaps for the Dirichlet and transmission problems.
Keywords: periodic media, Bloch waves, dispersion relation, asymptotic expansion, bandgaps.
1 Introduction
The discovery of photonic and phononic crystals, the creation and advancement of electromagnetic and acoustic metamaterials stimulated the development of efficient numerical methods for calculating their bandgap structure. The main tool for the evaluation of dispersion relations was the plane wave expansion method [1, 2, 3]. Later, other methods such as the finite-difference time-domain [4, 5, 6], the finite element [7, 8, 9] and boundary element methods [10, 11] employed. All these methods reduce the bandgap problem to the solution of an eigenvalue problem from which propagating frequency is determined. Analytic determination of bandgaps is a more challenging problem which becomes possible by introducing small or large parameters. This situation occurs in solid-state physics in the study of the energy bands of electrons when the periodic potential of crystals is small [12, 13]. Other examples are dealing with high contrast materials for inclusions and the matrix, such results were established in [14, 15, 16, 17].
The aim of standard bandgap analysis is the determination of absolute gaps consisting of frequencies for which no waves propagate in any direction. We will show the absence of absolute gaps in our problem and investigate local gaps defined by pairs for which waves with frequency do not propagate for small variations of the Bloch vector . A detailed definition of a local gap is given later.
We study the propagation of Bloch waves in a medium containing a periodic array of identical inclusions. The amplitude of the waves is governed by the equation
| (1.1) |
where is the wave number, is the time frequency, and is the wave propagation speed (different in the host medium and inclusions). Solution of (1.1) is sought in the form
where is the Bloch vector, and function is periodic with the period of the lattice. The representation above is equivalent to
| (1.2) |
where denotes the jump of and its gradient across the opposite sides of the cells of periodicity.
For simplicity, we assume that the fundamental cell of periodicity is a cube . Denote by the domain occupied by the inclusion in (see Figure 1). We select the origin for the coordinate system to be in and suppose that has a small size. Specifically, is produced by compressing an -independent region of arbitrary shape using the factor , . In other words, the transformation maps into . We assume that the boundary belongs to the class , which means that the functions that define the boundary have first-order derivatives that belong to the Hölder space with index .
We consider first the case when homogeneous Dirichlet conditions, which arise for some soft inclusions, are imposed on the boundary. The transmission problem is considered in §6. Then function in the fundamental cell of periodicity obeys the equation
| (1.3) |
and the boundary conditions
| (1.4) |
A non-trivial solution of (1.3),(1.4) with fixed exists not for all values of and . The relation between the parameters , for which there is a non-trivial solution, is called the dispersion relation. The problem (1.3),(1.4) is one-periodic in each component of , and the dispersion relation is a periodic function defined in .
The goal of this work is to find gaps i.e. the values of time frequency such that (1.3),(1.4) has only trivial solutions for all Bloch vectors . Thus, the waves with frequency do not propagate if belongs to a gap. These gaps are also called global or complete gaps. Geometrically, global gaps are empty intervals in the orthogonal projection of the dispersion surface onto the vertical -axis. Global gaps in correspond to the gaps in the spectrum of in with an arbitrary in the boundary condition (1.4). We will also consider local gaps whose rigorous definition will be provided later in this section.
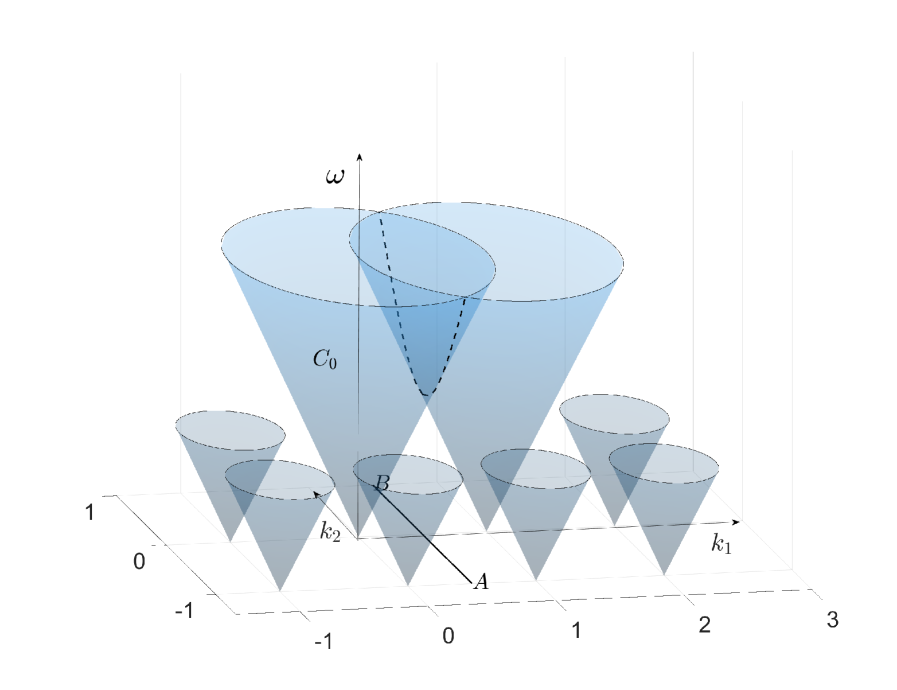
Consider the unperturbed problem. Observe that in the absence of inclusions, function satisfies (1.3),(1.4) with , i.e. . For any vector with integer components, functions are also satisfy the same boundary condition (1.4) and equation (1.3) with . The graph of the infinite-valued periodic in dispersion function for the unperturbed problem consists of the set of all the cones , see Figure 2.
For some values of , the unperturbed problem (1.3),(1.4) with has solutions different from , and the solution space has dimension . All such solutions have the form provided that and is a vector with integer components. The values of for which are called exceptional of order . Geometrically, refers to the number of points in the integer lattice (including the origin) belonging to the Ewald sphere [13] centered at with radius , i.e. equation
| (1.5) |
has solutions for exceptional , and only one solution for non-exceptional . Equation (1.5) can be written as
| (1.6) |
i.e. exceptional points belong to planes in whose distance from the origin goes to infinity as . An exceptional point has order if it belongs to planes (1.6). One can also describe exceptional wave vectors as values of for which cones in Figure 2 interest each other. In particular, in the two-dimensional analog of our problem in Figure 2, the line consists of exceptional points of order at least two.
The set of solutions of the problem (1.3),(1.4) remains the same if the wave vector is changed by a period of the reciprocal lattice. Thus it is enough to study local gaps related to one cone centered at the origin: . This will allow us to define local gaps related to other cones in Figure 2 using the periodicity of solutions in .
Let us fix a wave vector . The local gap corresponding to and associated with consists of frequencies for which Bloch waves do not propagate when wave vector has the same direction as and is sufficiently small. More precisely, Bloch waves with the frequency do not exist when for sufficiently small -independent .
It is not expedient to consider frequencies if the point is located at a positive, -independent distance from the set of cones shown in Fig. 2 (dispersion surfaces of the unperturbed problem). Bloch waves with parameters and do not propagate in the unperturbed problem and the problem with inclusions if is small enough. Thus, we introduce one more requirement in the definition of local gap . We assume that as where , i.e. .
Let tends to . We will show that
-
(a)
If belongs to a cone but not to the intersection of the cones, then , i. e. there are no local gap for wave vector and frequencies near .
-
(b)
If belongs to an intersection of with some other cone shown in Figure 2 then local gap exists in a neighborhood of for small if and only if , where satisfy (1.5). The location of the gap will be specified. We do not consider the points that belong to the intersection of three or more cones and those for which .
-
(c)
We will show that global gaps do not exist in any fixed interval of the time frequency if the size of the inclusion is small enough.
Note that the set of values of omitted from the consideration in item (b) forms a one-dimensional manifold in . Indeed, the set of exceptional vectors of multiplicity is given by the planes (1.6). Omitted from the consideration set of exceptional vectors of order higher than two are lines of intersections of those planes. Also, condition defines curves on planes (1.6), see Figure 3, where these curves are circles that are boundaries of shaded disks.
2 Outline of the approach
In [18, 19] we devised a new approach to determining the dispersion relation which allowed us to find the asymptotic expansion of the dispersion relation as . The expansions have a form of power series in which are different for non-exceptional and exceptional wave vectors . The expansion depends analytically on when is not exceptional, see a discussion below. To study gaps, we need to develop further these results in the present paper to obtain asymptotics in which is uniform in in a neighborhood of exceptional points.
As before, we enclose the inclusion in a ball of radius centered at the origin and split into the ball and its complement (see Figure 1). Next, we consider the following two problems in these two regions:
| (2.1) | ||||
| (2.2) |
where
| (2.3) |
will be determined below, . The unperturbed problems with are uniquely solvable for smooth enough for all except a countable set , and we choose }. Then solutions of (2.1),(2.2) defines two Dirichlet-to-Neumann operators , : , i.e.
| (2.4) |
The existence of a non-trivial solution to the problem (1.3),(1.4) is equivalent to the existence of a zero eigenvalue (EZE) for the operator . This abbreviation pertains specifically to the operator . Hence, the dispersion relation is given by (2.3) with determined from the EZE condition. In [18, 19], the reduction of the dispersion relation to the EZE problem enabled us to use regular perturbation techniques to study dispersion relations for each .
Observe that the choice of and therefore the definition of operators depend on . Since is an analytic function of and since is chosen in such a way that the problem (2.2) is uniquely solvable when is fixed and , the operator is analytic in and when . We will call this property the local analyticity in and small . Similarly, the operator is locally analytic in and small . The smoothness of the operator in is not obvious, because problem (2.1) is a singular perturbation of the corresponding problem without the inclusion (), and solutions of (2.1) do not have uniform limits as . However, the solution of (2.1) is infinitely smooth in when is small and is outside of a fixed neighborhood of the origin, and it was shown in [18, 19] that the interior DtN operator is infinitely differentiable in . We summarize these properties in the Lemma.
Lemma 2.1.
The Lemma reduces the study of the dispersion relation to the EZE problem for a smooth operator function. Special matrix representations of operators were constructed in [18, 19] that allowed us to solve the EZE problem and find the asymptotics of the dispersion relation as which is analytic in for non-exceptional and is valid for fixed exceptional . The gaps are related to exceptional points, and the study of gaps requires a uniform in asymptotics of . The main goal of the present paper is to construct a matrix representation of the operator , allowing to obtain uniform in asymptotics of the dispersion relations near the exceptional points and use them to study the gaps.
The study of the operator is simplified if we subtract from both terms of the difference above.
3 Necessary prerequisites
This section provides the results from [18, 19] needed to understand the goal and approach of the present paper.
The dispersion surface for the inclusionless () problem (1.3), (1.4) consists of the cone and its shifts shown in Fig. 1,2. Since the solutions of (1.3), (1.4) and of the corresponding transmission problem are periodic in and their dispersion surfaces are close to the surface for the inclusionless problem, it is enough to study the dispersion surface of the problems with inclusions only in a small neighborhood of . The information about other parts of the surface can be obtained simply by the shift in . Thus, similar to the approach used in [18, 19], we will assume first that is located in a small neighborhood of .
Non-exceptional wave vectors.
Let be a non-exceptional wave vector. Then solution space of the unperturbed problem (1.3),(1.4) () is one-dimensional and consists of functions proportional to . Respectively, the kernel of the operator consists of functions proportional to
which is the restriction of the exponent on . We present the domain and the range of the operator
as a direct sum of the one-dimensional space of functions proportional to and spaces ,, respectively, of functions orthogonal in to . Here subindexes “” and “” stay for the domain and the range.
We represent each element in the domain and the range of operator in the vector form where is the projection in of the function on , and is orthogonal to in , and use matrix representation of all the operators in the basis Due to Green’s formula, the operators are symmetric and therefore
| (3.1) |
where is an isomorphism.
Since operator depends smoothly on , we have
| (3.2) |
where is a constant, and is defined in (2.3). In [18] it was shown that .
Matrix representation for the interior operator has the form
| (3.3) |
where depends on the shape of and is equal to its electrical capacitance, i.e. total charge of when its potential is unity. In particular, for a sphere. Thus
| (3.4) |
This matrix representation allows one to find for which the kernel of the operator is not empty. Using (3.4), we write the equation in the form
| (3.5) |
Due to the invertibility of , we solve equation above for , and reduce (3.5) to a simple equation for . This implies that function can be found by equating the top left element in (3.5) with a different remainder term to zero. Thus, the implicit function theorem implies the following statement:
Lemma 3.1.
Let be an arbitrary non-exceptional wave vector and . Then
-
1.
The dispersion relation is uniquely defined in a neighborhood of the point if is sufficiently small. Function is infinitely smooth in and analytic in when .
-
2.
The following asymptotics holds
(3.6)
Exceptional wave vectors of order two. Let the Bloch vector in (1.4) be exceptional of multiplicity two, and therefore there exists a non-zero vector with integer components such that for . Then solution space of the unperturbed problem (1.3),(1.4) is spanned by functions . Respectively, the kernel of the operator is two-dimensional and consists of linear combinations of functions . Once again we present the domain and the range of the operator as a direct sum of space and its orthogonal in complements, and write all the operators in corresponding matrix form.
The formula (3.1) remains valid when is an exceptional wave vector of order two if zeroes of the matrix on the right-hand side of (3.1) are understood as the zero elements of the first two rows and first two columns of the matrix. In addition, formulas (3.2) and (3.3) remain valid if constants and are replaced by and , respectively, where and are identity and all-ones matrices, respectively. The analogue of (3.4) has the following block in the top left corner of the matrix:
| (3.7) |
and therefore, (3.5) now takes the form
| (3.8) |
The arguments after (3.5) imply that the dispersion relation at is defined by the equation where and have the same asymptotics with different specific values of the remainders. Since the eigenvalues of are distinct, the implicit function theorem can be applied to the equation for the variable . This leads to the existence of the following two roots:
| (3.9) |
4 Asymptotics of the DtN operators in the neighborhoods of exceptional points
The results concerning non-exceptional points described above are valid for all non-exceptional points. In particular, the function (3.6) is analytic in . On the contrary, formulas (3.9) were obtained for fixed exceptional points whose neighborhoods contained mostly non-exceptional points. We need to extend (3.1)-(3.4) in such a way that the corresponding asymptotics would be valid in the neighborhood of fixed wave vector of multiplicity two.
We do not consider the whole neighborhood of . It will be sufficient to focus only on the values of that belong to the ray through . Thus , . We will denote this segment by . It contains one exceptional point , and other points in are non-exceptional if is small enough. Matrix representation (3.1)-(3.4) in the previous section was based on one-dimensional space when and two-dimensional space when . Our next goal is to obtain the dispersion relation for the entire interval using the two-dimension space spanned by functions and . This will allow us to obtain the asymptotics of the dispersion relation as , , which is uniform in .
We start with a matrix representation of for similar to (3.1)-(3.2). As mentioned at the end of the previous section, if then formula (3.1) remains valid for the two-dimensional space . Since all the operators involved depend infinitely smoothly on small and the space is independent on the matrix representation of for sufficiently small and has the form
| (4.3) |
where is a matrix which is linear in and , and the entries of the matrix on the right-hand side are infinitely smooth in and . The next Lemma reveals the dependence of on and .
We will prove the lemma after we prove the following theorem.
Theorem 4.1.
Proof.
To obtain (4.7) we need to subtract the matrix representation of the operator , , from (4.3). depends infinitely smoothly on and and can be considered as an infinitely smooth operator-function of and . Obviously, the operator is zero when , and therefore can be written as , where operator does not depend on . This formula, (4.3) and Lemma 4.6 will justify (4.7) if we show that the upper left block of the matrix representation for is equal to . This block of coincides with the linear in part of a similar block of the matrix representation for with . The latter one was obtained in [19] when the matrix representation was studied for a fixed exceptional wave vector of multiplicity two, see §2, and it equals . ∎
Proof of Lemma 4.3.
Since and formula (4.3) when coincides with the matrix representation constructed in the previous section when , we have . Thus we need to justify only the form of in (4.6) and therefore we set in the calculations below.
The entries of are given by
| (4.11) |
where are two related exceptional wave vectors of multiplicity two, i.e., and .
Consider the solution of the problem in which is a union of the exterior problem in and the problem in without the inclusion:
| (4.12) |
with the Bloch boundary conditions on
| (4.13) |
Here we replaced by since . We write (4.11) in terms of :
| (4.14) |
Similar to solutions of (2.1), (2.2), functions are infinitely smooth function of and therefore
| (4.15) |
Then are solutions of the following problems:
| (4.16) | ||||
| (4.17) |
and (4.14) takes the form
| (4.18) |
In what follows we omit subscript “” from and add subscripts “” and “” to the restriction of to the domains and , respectively.
To evaluate the integral , where is solution of (4.16)-(4.17) in we apply Green’s second identity to the functions and in the domain , :
| (4.19) |
From here we have
| (4.20) |
Evaluation of the similar integral for yields
| (4.21) |
Thus,
| (4.22) |
In the middle integral, we make the substitution
| (4.23) |
Then satisfies the homogeneous condition (4.17) and the middle integral in (4.22) with instead of vanishes, and (4.22) becomes
| (4.24) |
Using again Green’s second identity we obtain
| (4.27) |
Thus, the latter formula with equality and (4.18) implies (4.6). ∎
5 Local and global gaps in the Dirichlet problem
To find bands and gaps, it is necessary to construct a dispersion surface which we view as the graph of a periodic infinite-valued function of the Bloch vector in the entire space. The arguments at the beginning of §3 imply that it is enough to study this surface only in a neighborhood of the cone .
The following statement justifies the item (a) from the introduction.
Theorem 5.1.
If belongs to the cone but not to the intersection of the cones of the dispersion surface of the unperturbed problem (see Figure 2), then , i. e. there is no local gap for wave vector and frequencies near .
Proof. We need to show that local gap cannot contain points such that as . Let us consider the segment in , where with some -independent . This segment intersects the cone when where as . The same remains true with a different if is replaced by the dispersion surface of the problem with inclusions since the latter surface depends smoothly on and when points are not exceptional and is small, see Lemma 3.1. Hence there is a Bloch wave with parameters as , and therefore . ∎
We fix an interval ) of frequencies with an arbitrary small .
To prove item (b) we need the following Lemma concerning the dispersion surface located above the interval with some -independent . For simplicity of the formulas below, we introduce in (4.10) new variables
| (5.1) |
Lemma 5.1.
There is such that the dispersion surface in the neighborhood of the point above the interval , , is split into the two branches determined by
| (5.2) |
where
| (5.3) |
Proof. The dispersion relation near the point is determined by the equation , where can be obtained from the EZE condition for the operator , see Lemma 2.1. We studied this EZE problem in §3 when by using the matrix representation (3.8) of the operator , and this representation allowed us to reduce the calculation of the function to the equation where is a matrix that differs from the matrix given by (3.7) only by the values of the remainder terms. The smoothness of the remainder terms of matrices and was established using Lemma 2.1.
Theorem 4.1 provides analogues of the matrix representation (3.8) and formula (3.7) on the whole interval , . The same arguments used to find for in §3, now allow us to find on the whole interval. These arguments lead to
| (5.6) |
where and the remainder term is infinitely smooth.
In new variables (5.1) equation (5.6) is equivalent to
| (5.8) | ||||
| (5.9) |
where . If the term in the remainder is omitted, then the roots of the simplified equation (5.9) are
| (5.10) |
The same is true without the simplification of the equation but there is a difficulty to justify this fact because the equation degenerates at the point of interest , and we cannot apply the implicit function theorem to determine . The same difficulty is present in equation (5.6) if we view as the eigenvalue of the remaining terms of the matrix (5.6). Then the zero eigenvalue of the matrix has multiplicity two when . Therefore we cannot guarantee a smooth dependence of the eigenvalue on the parameters. In our case the situation is even worse since the remainder depends on the eigenvalue.
We will proceed as follows. We rewrite (5.9) in the form
| (5.11) |
divide this equation by , introduce polar coordinates in the plane :
| (5.12) |
and replace by . In the new variables (5.11) reads
| (5.13) |
Now we can apply the implicit function theorem and solve (5.13) for . This leads to (5.10). Since and here can be replaced by , see (2.3), equation (5.10) can be rewritten as
To complete the proof of the lemma, it remains to use the relation between and :
∎
Theorem 5.2.
Remark 1.
The location of the Bloch vector on the surface of the first Brillouin zone for which waves cannot propagate is shown in Figure 3 by shaded unit disks.
Proof. Local gap consists of frequencies such that as and the interval defined by equations with some -independent value of does not intersect the branches of the dispersion surface described in Lemma (5.1).
We start the proof with the second part. Let . Then for defined in Lemma (5.1) we have . Using the inequality , we obtain the following estimates for function defined in (5.2) with small, -independent and :
Hence, the range of the function contains the segment if is small enough. Thus, for any close enough to , there exists such that and . In other words, the ray intersect the graph of the dispersion surface when , the Bloch wave propagates with the frequency and , and therefore . Note that the same result can be obtained using instead of .
Let now , and therefore . Denote by functions defined in (5.2) with the remainder terms omitted. The minimum of is attained at with the value . Similarly, the maximum of is attained at with the value . Thus, the gap between the ranges of these two functions is the interval . If with a large, but fixed -independent constant , then (5.2) implies that the gap between ranges of functions is the interval . When and is small enough, the gap between functions can be estimated through and this gap includes interval . Hence, is the exact interval such that the segment introduced at the beginning of the proof does not intersect the dispersion surface when . This completes the proof of the theorem. ∎
Finally, we prove the theorem on the absence of global gaps under small perturbations.
Theorem 5.3.
Global gaps do not exist in any fixed interval of the time frequency if the size of the inclusion is sufficiently small.
Proof. We will provide two proofs: the first one is geometrical and the second is shorter but more formal. For clarity, we explain the first proof in the two-dimensional case shown in Figure 2.
For to be in a global gap, the plane must not intersect the dispersion surface of the problem with inclusions. Hence the surface in Figure 2 must break when and create a gap allowing the plane to go through without intersection with the surface. It could happen only near the intersection of with other cones where the dispersion surface could split and move apart when . This splitting takes place, and the line of intersection of the cones where the splitting occurs is shown in Figure 2 by the dashed curve. Its projection on is the line consisting of exceptional points of multiplicity two given by (1.6). However, the plane intersects the cone along the circle and the splitting when is on the circle may occur only in a small neighborhood of exceptional points near the circle. The plane intersects the dispersion surface in the neighborhood of other points on the circle and therefore does not belong to a global gap.
6 Local and global gaps in the transmission problem
The amplitude of the Bloch solution of the transmission problem satisfies the equation
| (6.1) |
with the boundary conditions on
| (6.2) |
where , is the speed of the wave propagation in the medium and inclusion, respectively, is the adiabatic bulk compressibility modulus, and is the mass density. Here and on the subscript refers to the value of the quantity outside/inside of the inclusion. The brackets denote the jump of the enclosed quantity across .
The analysis of gaps in the transmission problem is similar to that in the Dirichlet problem. In particular, Lemma 4.1 about matrix representation of remains valid with the same representation of matrix . Also, Theorem 5.1 about the absence of local gaps near simple points of the cone still holds for the transmission problem.
While the exterior operators of the Dirichlet and transmission problems coincide, the interior operators have a different form. For the exceptional wave vector of order such that its integer-valued shifts , are also satisfy (1.1), (1.2), the asymptotics of the quadratic form
| (6.3) |
is given by the matrix obtained in [18]. For simplicity, we provide the form of this matrix in the case of spherical inclusions
| (6.4) |
where
| (6.5) |
Here and is the volume fraction of the inclusions. Matrix plays the role of the matrix in (4.10) for the Dirichlet problem. Therefore, if is an exceptional vector of multiplicity two, the matrix in (4.10) has the form
| (6.10) | ||||
| (6.11) |
Equating the leading term of the determinant of to zero we obtain a quadratic equation for
| (6.12) |
The analog of Lemma 5.1 is
Lemma 6.1.
There is such that the dispersion surface in the neighborhood of the point above the interval , , is split into the two branches determined by
| (6.13) |
where and are given by (5.1) and (5.3). This expression is similar to (5.2) and we can use the same analysis to find the location of local gaps. The result is given by
Theorem 6.1.
7 Conclusions
We considered the propagation of acoustic waves in a medium containing a simple cubic array of small inclusions of arbitrary shape. We show that global gaps do not exist in each fixed interval of the time frequency if the size of inclusions is small enough. The notion of local gaps defied by wave vectors is introduced and studied. We calculate the location of local gaps analytically for the Dirichlet and transmission problems. The width of the local bandgaps in the Dirichlet problem is proportional to the size of the inclusions while in the transmission problem problem, it is proportional to the volume fraction of the inclusions. Although the bandgaps in the two problems were different, they exist for the same values of the Bloch vector . In particular, local gaps exist on the boundary of the first Brillouin zone which is the unit cube in our scaling if belongs to the unit disks on the faces of the cube.
References
- [1] Kushwaha MS, Halevi P, Martínez G, Dobrzynski L, Djafari-Rouhani B. 1994 Theory of acoustic band structure of periodic elastic composites. Physical Review B 49, 2313–2322.
- [2] Johnson S, Joannopoulos J. 2001 Block-iterative frequency-domain methods for Maxwell’s equations in a planewave basis. Optics Express 8, 173–190.
- [3] Wu T, Huang Z, Lin S. 2004 Surface and bulk acoustic waves in two-dimensional phononic crystal consisting of materials with general anisotropy. Physical Review B 69.
- [4] Fan S, Villeneuve P, Joannopoulos J. 1996 Large omnidirectional band gaps in metallodielectric photonic crystals. Physical Review B 54, 11245–11251.
- [5] Tanaka Y, Tomoyasu Y, Tamura S. 2000 Band structure of acoustic waves in phononic lattices: Two-dimensional composites with large acoustic mismatch. Physical Review B 62, 7387–7392.
- [6] Taflove A, Hagness SC. 2005 Computational Electrodynamics: The Finite-Difference Time-Domain Method. Artech House Publishers, 3rd edition.
- [7] Axmann W, Kuchment P. 1999 An efficient finite element method for computing spectra of photonic and acoustic band-gap materials - I. Scalar case. Journal of Computational Physics 150, 468–481.
- [8] Dobson D. 1999 An efficient method for band structure calculations in 2D photonic crystals. Journal of Computational Physics 149, 363–376.
- [9] Giani S, Graham IG. 2012 Adaptive finite element methods for computing band gaps in photonic crystals. Numerische Mathematik 121, 31–64.
- [10] Joannopoulos JD, Johnson SG, Winn JN, Meade RD. 2011 Photonic Crystals: Molding the Flow of Light. Princeton, NJ: Princeton University Press.
- [11] Li FL, Wang YS, Zhang C, Yu GL. 2013 Bandgap calculations of two-dimensional solid-fluid phononic crystals with the boundary element method. Wave Motion 50, 525–541.
- [12] Ashcroft NW, Mermin ND. 1976 Solid state physics. New York: Holt, Rinehart and Winston.
- [13] Kittel C. 2004 Introduction to Solid State Physics. Wiley 8th edition.
- [14] Figotin A, Kuchment P. 1996 Band-gap structure of spectra of periodic dielectric and acoustic media. 2. Two-dimensional photonic crystals. SIAM Journal on Applied Mathematics 56, 1561–1620.
- [15] Ammari H, Kang H, Lee H. 2009 Asymptotic Analysis of High-Contrast Phononic Crystals and a Criterion for the Band-Gap Opening. Archive for Rational Mechanics and Analysis 193, 679–714.
- [16] Lipton R, Viator, Jr. R. 2017 Creating band gaps in periodic media. Multiscale Modeling and Simulation 15, 1612–1650.
- [17] Lipton R, Viator, Jr. R, Bolanos SJ, Adili A. 2022 Bloch waves in high contrast electromagnetic crystals. ESAIM-Mathematical Modelling and Numerical Analysis 56, 1483–1519.
- [18] Godin YA, Vainberg B. 2022 Clusters of Bloch waves in three-dimensional periodic media. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences 478, 20220519.
- [19] Godin YA, Vainberg B. 2023 Propagation and dispersion of Bloch waves in periodic media with soft inclusions. eprint arXiv: 2207.08296.
- [20] Kafesaki M, Penciu RS, Economou EN. 2000 Air Bubbles in Water: A Strongly Multiple Scattering Medium for Acoustic Waves. Phys. Rev. Lett. 84, 6050–6053.
- [21] Kushwaha M, Djafari-Rouhani B, Dobrzynski L, Vasseur J. 1998 Sonic stop-bands for cubic arrays of rigid inclusions in air. European Physical Journal B 3, 155–161.