Mechanics of metric frustration in contorted filament bundles:
From local symmetry to columnar elasticity
Abstract
Bundles of filaments are subject to geometric frustration: certain deformations (e.g. bending while twisted) require longitudinal variations in spacing between filaments. While bundles are common—from protein fibers to yarns—the mechanical consequences of longitudinal frustration are unknown. We derive a geometrically-nonlinear formalism for bundle mechanics, using a gauge-like symmetry under reptations along filament backbones. We relate force balance to orientational geometry and assess the elastic cost of frustration in twisted toroidal bundles.
Elastic zero modes are a ubiquitous feature of soft materials, from mechanical metamaterials [1, 2] to liquid crystal elastomers [3]. Such systems can undergo large deformations with minimal strain, as geometrically coupled rotations and translations preserve local spacing between microscopic constituents. The smectic and columnar liquid crystalline phases provide paradigmatic examples of zero modes in soft elastic systems, permitting relative “sliding” of 2D layers and 1D columns, respectively. The zero-cost sliding displacements of smectic and columnar phases are characteristic of a much broader class of laminated and filamentous structures, ranging from multi-layer graphene materials [4] and stacked paper [5] to biopolymer bundles [6, 7], nanotube yarns [8], wire ropes [9].
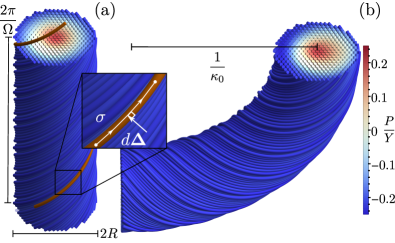
While there are well established frameworks which capture the geometric nonlinearities of smectic liquid crystals (i.e., the strain tensor accurately describes arbitrarily large and complex deformations) [10], no such framework exists for columnar and filamentous materials. The orientations of column backbones impose constraints on inter-filament spacing, generating rich modes of geometric frustration without counterpart in smectic liquid crystals. In the simplest non-trivial case of helical bundles, predictions from a minimally non-linear approximation of columnar elasticity [11] and tomographic analysis of elastic filament bundles [12] show that twist in straight bundles gives rise to non-uniform inter-filament stress and spacing in transverse sections (see Fig 1a). Except for the restrictive classes of straight, twisted bundles [13] and twist-free developable domains [14, 15], bundle textures also generate longitudinal frustration, requiring local spacings to vary along a bundle [16]. Although deformations that introduce longitudinal frustration are the rule rather than the exception—for example, wire ropes or toroidal biopolymer condensates are both twisted and bent (e.g. Fig. 1)—existing frameworks of columnar elasticity fail to capture this effect.
In this Letter, we develop a fully geometrically non-linear Lagrangian elasticity theory of columnar materials, which completely captures the interplay between orientation, and both lateral and longitudinal frustration of inter-filament spacing. We construct this theory by imposing a gauge-like local symmetry under reptations, deformations that slide filaments along their contours without changing the inter-filament spacing. The resultant equilibrium equations point to the role geometrical measures of non-equidistance play in bundles’ mechanics. Within this framework, we compute the energetic costs of longitudinal frustration in twisted, toroidal bundles, and give evidence that 1) optimal configurations generically incorporate splay and 2) the bending cost that derives from non-uniform compression depends non-monotonically on pretwist.
To construct the elastic theory, we divide space into points on curves (i.e. filament backbones) labeled by two coordinates: , a 2D label of filaments; and , a length coordinate along filaments. Hence, the location of each point in the bundle is described by a function , with parallel to the tangent vector . Because they lack positional order along their backbone curves, filament bundles and columnar liquid crystals have a family of continuous zero modes, corresponding to reptations (Fig. 1),
| (1) |
We assume that changes in local spacing can be described by a hyper-elastic energy density function , that depends only on the deformation gradient [17].
To account for reptation symmetry, we demand that depend on a modified deformation gradient, which transforms as a scalar under , depends solely on the deformation, , of the material itself, and recovers the well-established 2D elasticity of developable [14, 15] bundles. Specifically, we construct a covariant derivative , where is the usual covariant derivative on tensors in the material space and determines , such that if two configurations, and , are related by Eq. (1), then . In order for to be reptation invariant, we must have that . Therefore, . To construct an elastic theory of columnar materials, we set , which is manifestly reptation invariant but also leads to a deformation gradient that only measures deformations transverse to the local backbones,
| (2) |
Notably, for two nearby filaments at and in material coordinates, it is straightforward to show that the covariant derivative gives the local distance of closest approach , for which (see again inset of Fig. 1a). As shown explicitly in the Appendix, this covariant deformation gradient captures the standard 2D deformation gradients of developable domains (i.e. parallel arrays).
From this deformation gradient, we construct an effective metric , which is naturally invariant under rotations of , and which encodes the metric inherited by the local 2D section transverse to the filaments in the bundle 111Equidistant bundles where components of are uniform along are known as Riemannian fibrations, see e.g. [36, 37], and the transverse structure can be mapped on to single 2D base space. Non-equidistant bundles correspond to Sub-Riemannian generalizations [38] where the inherited metric measures distances in the 2-planes perpendicular to at each point.. Because , the effective metric only has components for block , which we denote using index notation , . With these definitions, we construct the Green-Saint-Venant strain tensor, [17, 19, 20]
| (3) |
where is the target metric corresponding to strain-free state, which for this Letter, we take to be developable with uniform spacing, so . For weak deflections from the uniform parallel state, Eq. (3) reduces to the small-tilt approximation to the non-linear columnar strain [21, 22, 11], which captures the lowest-order dependence of spacing on orientation (see Appendix).
Assuming that strains are small though deformations may be large, the Hookean elastic energy takes the usual form,
| (4) |
where is the nominal stress tensor, and is a tensor of elastic constants which depends on both the crystalline symmetries of the underlying columnar order and the target metric, 222We raise and lower indices with , the inverse of , rather than , as a matter of convenience, and note that the difference in the elastic energy is higher order in the strain tensor [20].. Energetics of columnar materials also include other gauge-invariant costs, including the Frank-Oseen orientational free energy and the cost of local density changes along columns 333The symmetry under local reptations in this theory is unlike a related treatment of both the nematic to smectic-A transition [39, 40] and its columnar analog [41, 42, 43] in which the gauge symmetry of a density-wave is explicitly broken by, e.g., the splay elasticity of the underlying nematic order.. Here, for clarity, we focus only on the energetics of columnar strain and detail the combined effects of other contributions elsewhere [25]. Given this gauge-invariant formulation of the columnar strain energy, we first illustrate the mechanical effects of orientational geometry on local forces. This follows from the bulk Euler-Lagrange equations of Eq. (21) (see Appendix for a complete derivation),
| (5) |
The bulk terms represent body forces generated by the columnar strains, which must be balanced by other internal stresses or external forces. To cast them in a more geometrical light, we consider separately the components tangential and perpendicular to , and , respectively.
Making use of the identity, , the tangential forces can be recast simply as
| (6) |
where
| (7) | ||||
is the convective flow tensor that measures longitudinal variations in inter-filament spacing [16]. Just as the second fundamental form measures gradients of a surface’s normal vector [26], measure the symmetric gradients of in its normal plane (i.e. its trace is the splay of filament tangents).
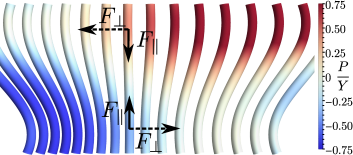
Here, we see that tangent forces couple non-equidistance to the stress tensor much like the Young-Laplace law couples in-plane stresses to normal forces in curved membranes [19]. This analogy becomes exact for zero twist textures: when , filaments can be described by a set of surfaces normal to . In this case, it is possible to choose coordinates so that , and tangential forces give the Young-Laplace force normal to each surface, with reducing to their second fundamental form. This illustrates the intuitive notion, shown schematically in Fig. 2, that columnar strain generates tangential body forces that push material points towards lower-stress locations in the array.
The bulk components of Eq. (30) perpendicular to give the transverse force
| (8) |
This form captures the divergence of stress in the planes perpendicular to backbones. The second term accounts for the corrections arising from material derivatives that lie along the backbone, such as twisted textures, when . Thus, the longitudinal derivatives in are needed to capture transverse mechanics of even equidistant twisted bundles beyond the lowest order geometric non-linearity [11].
We now illustrate the energetics of longitudinal frustration by considering a prototypical non-equidistant geometry: twisted toroidal bundles. Motivated in large part by the morphologies of condensed biopolymers [6, 7], theoretical models of twisted toroids have focused on their orientational elasticity costs [27, 28, 29], ignoring the unavoidable frustration of inter-filament spacing in this geometry. While satisfying force balance in non-equidistant bundles requires physical ingredients beyond the columnar strain energy, which we consider elsewhere [25], for the purposes of this Letter we take advantage of the full geometric-nonlinearity of Eq. (30) to explore the specific costs of longitudinal gradients in spacing required by simultaneous twist and bend.
We construct twisted toroids from equilibrium twisted helical bundles of radius and constant pitch, by bending them such that their central curve is deformed from a straight line into a circle of radius (see Fig. 1b). We then define perturbative displacements relative to the bent, pre-twisted bundles, where and describe the (Eulerian) distance from the central curve and the angular position relative to its normal in the plane perpendicular to its tangent , and where . The small- limit of the force balance equations for the strain energy motivates the following displacements
| (9) |
where , , and are variational parameters. Notably, to linear order in curvature, these parameterize the“almost equidistant” ansatzes considered previously, including splay-free () [27] configurations and [16] ansatzes.
We expand the energy to quadratic order in , holding the center of area at , which constrains , then minimize Eq. (21) with respect to the displacements for a given . Examples of the distribution of pressure are shown in Fig. 1b. Relative to the axisymmetric pressure induced by helical twist in the straight bundle, bending into a twisted toroid requires bunching (spreading) of the filaments at the inner (outer) positions in the toroid, leading to a polarization of the pressure towards the normal.
Because bending and twisting of bundles introduces longitudinal strain variation, bending pre-twisted bundle introduces additional stresses whose elastic cost can be characterized by an effective bending stiffness , defined by , which derives purely from columnar strain, rather than intra-filament deformations. Fig. 3 shows that longitudinal frustration leads to a bending cost that increases with small twist as , but eventually gives way to remarkable non-monotonic behavior at large pre-twist. We note further that the bending cost grows with the 2D Poisson ratio of the columnar array, highlighting the importance of local compressional deformations in optimal twisted toroids.
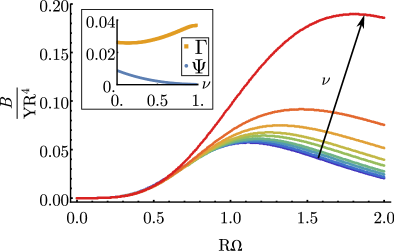
We analyze the optimal modes of deformation via the convective flow tensor, in particular, the trace (splay) and deviatoric components (biaxial splay) [30], which characterize longitudinal gradients of dilatory and shear stress in the columnar array. In contrast to a heuristic view that optimal packings should favor the uniform area per filament of splay-free textures, the inset of Fig. 3 instead shows that optimal toroids incorporate a mixture of both splay and biaxial splay where we define the respective measures of average splay and biaxial splay, and . Only in the incompressible limit, as , does the splay vanish, and only at the expense of additional biaxial splay and energetic cost, implying counterintuitively that splayed textures are in fact energetically favorable in longitudinally frustrated twisted toroids. Indeed, the energetic preference for splay in non-equidistant bundles, can be traced to force balance conditions in this geometry [25].
In summary, we have shown that gauge-theoretic principles underlie the geometrically-nonlinear theory of columnar elasticity, providing a means to quantify the cost of longitudinal frustration in the mechanics of bundles. Unlike phase field models of nonlinear elasticity (such as [31, 32]), this description depends neither on the presence of a planar reference state, nor presupposes uniform crystalline order, allowing us to both accommodate the effective curvature of bundles of constant pitch helices [33], and providing a natural generalization to arbitrary target metrics [19]. Finally, because this approach to elasticity relies only on the existence of local, continuous zero modes, we note that it can be generalized to other liquid crystals, like smectics, and anticipate that it may have applications beyond liquid crystals, including mechanical metamaterials.
Acknowledgements.
The authors gratefully acknowledge useful discussions with R. Kusner, S. Zhou, and B. Davidovitch. M. Dimitriyev, D. Hall, and R. Kamien provided feedback on an early draft of this manuscript. This work was supported by the NSF under grants DMR-1608862 and NSF DMR-1822638; D.A. received additional funding from the Penn Provost’s postdoctoral fellowship and NSF MRSEC DMR-1720530.References
- Mao et al. [2010] X. Mao, N. Xu, and T. C. Lubensky, Physical Review Letters 104, 085504 (2010).
- Sun et al. [2012] K. Sun, A. Souslov, X. Mao, and T. C. Lubensky, Proceedings of the National Academy of Sciences 109, 12369 (2012).
- Warner et al. [1994] M. Warner, P. Bladon, and E. M. Terentjev, Journal de Physique II 4, 93 (1994).
- Xu et al. [2013] Z. Xu, H. Sun, X. Zhao, and C. Gao, Advanced Materials 25, 188 (2013).
- Poincloux et al. [2020] S. Poincloux, T. Chen, B. Audoly, and P. Reis, arXiv:2012.01335 [cond-mat] (2020), arXiv:2012.01335 [cond-mat] .
- Hud and Downing [2001] N. V. Hud and K. H. Downing, Proceedings of the National Academy of Sciences 98, 14925 (2001).
- Leforestier and Livolant [2009] A. Leforestier and F. Livolant, Proceedings of the National Academy of Sciences 106, 9157 (2009).
- Zhang et al. [2004] M. Zhang, K. R. Atkinson, and R. H. Baughman, Science 306, 1358 (2004).
- Costello [1990] G. A. Costello, Theory of Wire Rope, Mechanical Engineering Series (Springer-Verlag, New York, 1990).
- Grinstein and Pelcovits [1982] G. Grinstein and R. A. Pelcovits, Physical Review A 26, 915 (1982).
- Grason [2012] G. M. Grason, Physical Review E 85, 10.1103/PhysRevE.85.031603 (2012).
- Panaitescu et al. [2017] A. Panaitescu, G. M. Grason, and A. Kudrolli, Physical Review E 95, 10.1103/PhysRevE.95.052503 (2017).
- Grason [2015] G. M. Grason, Reviews of Modern Physics 87, 401 (2015).
- Bouligand [1980] Y. Bouligand, Journal de Physique 41, 1297 (1980).
- Kléman [1980] M. Kléman, Journal de Physique 41, 737 (1980).
- Atkinson et al. [2019] D. W. Atkinson, C. D. Santangelo, and G. M. Grason, New Journal of Physics 21, 062001 (2019).
- Ciarlet [2005] P. G. Ciarlet, Journal of Elasticity 78, 1 (2005).
- Note [1] Equidistant bundles where components of are uniform along are known as Riemannian fibrations, see e.g. [36, 37], and the transverse structure can be mapped on to single 2D base space. Non-equidistant bundles correspond to Sub-Riemannian generalizations [38] where the inherited metric measures distances in the 2-planes perpendicular to at each point.
- Efrati et al. [2009] E. Efrati, E. Sharon, and R. Kupferman, Journal of the Mechanics and Physics of Solids 57, 762 (2009).
- Dias et al. [2011] M. A. Dias, J. A. Hanna, and C. D. Santangelo, Physical Review E 84, 036603 (2011).
- Selinger and Bruinsma [1991] J. V. Selinger and R. F. Bruinsma, Physical Review A 43, 2910 (1991).
- Grason and Bruinsma [2007] G. M. Grason and R. F. Bruinsma, Physical Review Letters 99, 10.1103/PhysRevLett.99.098101 (2007).
- Note [2] We raise and lower indices with , the inverse of , rather than , as a matter of convenience, and note that the difference in the elastic energy is higher order in the strain tensor [20].
- Note [3] The symmetry under local reptations in this theory is unlike a related treatment of both the nematic to smectic-A transition [39, 40] and its columnar analog [41, 42, 43] in which the gauge symmetry of a density-wave is explicitly broken by, e.g., the splay elasticity of the underlying nematic order.
- Atkinson et al. [2020] D. W. Atkinson, C. D. Santangelo, and G. M. Grason, in preparation (2020).
- Millman and Parker [1977] R. S. Millman and G. D. Parker, Elements of Differential Geometry (Englewood Cliffs, N.J. : Prentice-Hall, 1977).
- Kulić et al. [2004] I. M. Kulić, D. Andrienko, and M. Deserno, Europhysics Letters 67, 418 (2004).
- Charvolin and Sadoc [2008] J. Charvolin and J. F. Sadoc, The European Physical Journal E 25, 335 (2008).
- Koning et al. [2014] V. Koning, B. C. v. Zuiden, R. D. Kamien, and V. Vitelli, Soft Matter 10, 4192 (2014).
- Selinger [2018] J. V. Selinger, Liquid Crystals Reviews 6, 129 (2018).
- Chaikin and Lubensky [1995] P. M. Chaikin and T. C. Lubensky, Principles of Condensed Matter Physics (Cambridge University Press, Cambridge, 1995).
- Stenull and Lubensky [2009] O. Stenull and T. C. Lubensky, private communication (2009).
- Bruss and Grason [2012] I. R. Bruss and G. M. Grason, Proceedings of the National Academy of Sciences 109, 10781 (2012).
- Kléman and Oswald [1982] M. Kléman and P. Oswald, Journal de Physique 43, 655 (1982).
- Grason [2013] G. M. Grason, Soft Matter 9, 6761 (2013).
- O’Neill [1966] B. O’Neill, The Michigan Mathematical Journal 13, 459 (1966).
- Gromoll and Walschap [2009] D. Gromoll and G. Walschap, Submersions, foliations, and metrics, in Metric Foliations and Curvature (Birkhäuser Basel, Basel, 2009) pp. 1–44.
- Agrachev et al. [2019] A. Agrachev, D. Barilari, and U. Boscain, A Comprehensive Introduction to Sub-Riemannian Geometry, Cambridge Studies in Advanced Mathematics (Cambridge University Press, 2019).
- de Gennes [1972] P. G. de Gennes, Solid State Communications 10, 753 (1972).
- Lubensky et al. [1982] T. C. Lubensky, G. Grinstein, and R. A. Pelcovits, Physical Review B 25, 6022 (1982).
- Giannessi [1986] C. Giannessi, Physical Review A 34, 705 (1986).
- Kamien and Nelson [1995] R. D. Kamien and D. R. Nelson, Physical Review Letters 74, 2499 (1995).
- Kamien [1996] R. D. Kamien, Journal de Physique II 6, 461 (1996).
Appendix A The form of the deformation gradient
To construct the covariant derivative in Eq. (2), we demand, in addition to reptation symmetry and dependence only on gradients of the deformation, that reduce to the usual 2D deformation gradient for the well studied developable bundles [34, 35], where the cross-sectional geometry is Euclidean [14, 15]. This constrains the value of in Eq. (2). Here, we illustrate that this reduces to the expected 2D planar elasticity of developable bundles.
In a developable bundle, all curves are everywhere to a common set of planes and therefore, share a common tangent in those planes. Choosing a curve in the bundle with tangent vector , this condition requires that . Introducing a “twist-free”, right-handed, orthonormal frame ,
| (10) | ||||
We can now see that a deformation yields a developable bundle (up to reptations) when it can be written as
| (11) |
where and are deformation fields depending only on the orthogonal () position, as the tangent field is independent of and .
The most generic form of the covariant deformation gradient invariant under reptations is
| (12) |
where is an unknown function of (i.e. a potential non-zero value of ). From eq. (11) we find that
| (13) | ||||
| (14) | ||||
| (15) |
Namely, is the only term remaining in the component, while in the and components, is subtracted from the standard 2D deformation gradient in the planes normal to . Hence, in order that strains recover the elastic distortions of transverse distances in the columnar structure, for developable structure we must have .
A similar argument constrains . Again, because we expect that well established descriptions of 2D elasticity hold for developable bundles, we have that should be independent of independent displacements , as well as reptations, and that . This leaves , where is independent of the deformation. Since, at the level of metric, is independent of the deformation, no matter what is, it will not appear in the strain tensor, which has by definition of eq. (3) components only for . For simplicity, we take .
Appendix B Small tilt limit
We can recover the small-tilt approximation of the strain tensor from [21, 22, 11] starting from Eq. (3), where the fully geometrically-nonlinear strain, , is
| (16) |
We break the deformation up into the unstrained, cartesian coordinates and a displacement field in the plane, taking the arc-coordinate . Then,
| (17) |
where and , and . Subtracting off the Euclidean target metric, , we have
| (18) |
Now substituting for and in the last term, and grouping terms by power of the displacement field , we have:
| (19) |
Expanding the denominator for small displacement fields, and keeping only terms which are quadratic in recovers the rotationally invariant strain tensor,
| (20) |
Appendix C Derivation of the force-balance equations
We are looking for local extrema of the elastic energy
| (21) |
with respect to the deformation, , where , is the target metric, as in Eq. (3), is the strain tensor, as in Eq. (3), and is the nominal stress tensor, as defined following Eq. (5). As such, we consider arbitrary variations of the energy around these local extrema, so that the restoring force on a small material volume is given by:
| (22) |
What remains then is to work out , and apply the divergence theorem to derive the conditions of force balance. First, we note that and that the covariant derivative is just the usual partial derivative on scalars in the material space, so . We then have
| (23) |
Since , only two terms in contribute to :
| (24) |
and
| (25) |
All together, we have that
| (26) |
where again we use that . Substituting this back into our integral, we find that
| (27) |
Now we apply the divergence theorem, finding that
| (28) | ||||
| (29) |
where is the vector normal to the boundary of the material. Eq. (29), gives the boundary forces associated with residual stresses at the boundary, either directly from the stress tensor (first term), or from a non-zero flux of filament ends (second term). Now noting that for a vector in the material space, , and that, since is an arbitrary variation, everything dotted into it must vanish, Eq. (28) reduces to Eq (5):
| (30) |
We obtain Eq (6)–(8) by projecting Eq. (30) along and perpendicular to . The component is
| (31) |
Because , , and because the stress tensor is symmetric, we can rewrite this in terms of the convective flow tensor of the bundle,
| (32) |
as
| (33) |
recovering Eq. (6).
The orthogonal forces follow straightforwardly by projecting out the tangent component and the definition of the gauge covariant derivative, as , from which we recover Eq. (8).
Appendix D The energetics of twisted-toroidal bundles with small curvatures
From Eqs. (6) and (8), we can solve for the stable configurations of bundles of helices with constant pitch (i.e., the twist axis is unbent). For a hexagonal columnar phase, the tensor of elastic constants in the material frame is
| (34) |
where and are the 2D Young’s modulus and Poisson ratio, respectively. The deformation field for a bundle of helices with uniform pitch is
| (35) |
where here is a central reference curve which we take to be a straight line with , is the usual radial unit vector in cylindrical coordinates in the target space, , and , , and are the radial, polar, and cylyndrical coordinates in the material space. The tangent field then lies along , so . In the absence of external forces, Eqs. (6) and (8) now reduce to a nonlinear boundary value problem (BVP) for :
| (36) | ||||
| (37) | ||||
| (38) |
Solving this BVP numerically gives the equilibrium deformation field for the straight helical bundle, as shown in Fig. 1.
To find the low energy configurations of weakly curved twisted-toroidal bundles, we now introduce a perturbation at to Eq. (35) by taking and , with
| (39) |
and expand the elastic energy in Eq. (4) to quadratic order in . The linear correction to the elastic energy vanishes because the constant pitch helical bundles are in force balance, and so the resulting elastic energy takes the form
| (40) |
Scaling analysis of the force balance equations shows that, at small , the components of are
| (41) | ||||
as in Eq. (9). To stop the bundle from unbending and effectively decreasing its curvature, we fix the average position along the normal vector, , at , so that
| (42) |
This constrains , since
| (43) |
Having found from Eq. (36), we can subtitute the ansatz from Eq. (9) into the elastic energy in Eq. (4) and integrate over the volume for a given Young’s modulus, , 2D Poisson’s ratio, , and reciprocal pitch, , to obtain an elastic energy
| (44) |
Eq (44) is quadratic in and and has a minima at , whenever and are nonzero. These energy minimizing displacements, and the resultant pressure in the cross-section, are shown in Fig. 1 for a given . The resultant elastic energy per unit length takes the form of an effective bending modulus, as shown Fig. 3.
Twisted toroidal bundles are non-equidistant, and we can calculate the components of the convective flow tensor from the perturbative displacements in Eq. (41). Since the uniform pitch helices are equidistant, the leading contribution to the convective flow tensor is linear in :
| (45) | ||||
By substituting Eq (41) into the above expression for , and using the lowest energy values of and , we can calculate the elasticity-mediated response of twisted-toroidal bundles to the geometric constraints on constant spacing. The contributions to non-equidistance can be broken up into the splay, , and biaxial splay, , of the tangent field, . To measure the contributions to these two modes from the linear displacements driven by elastic interactions of twisted-toroidal bundles, we compare their integrated, dedimensionalized contributions to the Frank free energy,
| (46) | ||||
| (47) |
where , as shown in the inset of Fig. 3.