Metric thickenings, Borsuk–Ulam theorems, and orbitopes
Abstract.
Thickenings of a metric space capture local geometric properties of the space. Here we exhibit applications of lower bounding the topology of thickenings of the circle and more generally the sphere. We explain interconnections with the geometry of circle actions on Euclidean space, the structure of zeros of trigonometric polynomials, and theorems of Borsuk–Ulam type. We use the combinatorial and geometric structure of the convex hull of orbits of circle actions on Euclidean space to give geometric proofs of the homotopy type of metric thickenings of the circle.
Homotopical connectivity bounds of thickenings of the sphere allow us to prove that a weighted average of function values of odd maps on a small diameter set is zero. We prove an additional generalization of the Borsuk–Ulam theorem for odd maps . We prove such results for odd maps from the circle to any Euclidean space with optimal quantitative bounds. This in turn implies that any raked homogeneous trigonometric polynomial has a zero on a subset of the circle of a specific diameter; these results are optimal.
Key words and phrases:
Metric thickening, Vietoris–Rips complexes, Borsuk–Ulam theorems, orbitopes, trigonometric polynomials, moment curves, optimal transport1. Introduction
A compact metric space admits a canonical isometric embedding into , the dual space of real-valued continuous functions on . If is equipped with a Wasserstein metric, then convex combinations of nearby points of in give a canonical thickening of the space that exhibits local connectivity properties of . In particular, if is a sufficiently dense sample of points in an ambient space , and satisfies additional conditions such as being a closed Riemannian manifold with certain curvature bounds, then these metric thickenings of recover the homotopy type of at small scale parameters [30, 3].
In the present manuscript we relate metric thickenings of the circle (and more generally the -sphere ) to convexity properties of orbits of circle actions on Euclidean space, to Borsuk–Ulam type theorems, and to the structure of zeros of trigonometric polynomials with a prescribed spectrum. We will briefly introduce these notions here and state our main results.
Borsuk–Ulam theorems for higher-dimensional codomains.
The classical Borsuk–Ulam theorem states that any continuous map identifies some point with its antipode: for some . Equivalently, any odd map , namely a map satisfying for all , must have a zero: for some . For lower-dimensional codomains, Gromov’s “waist of the sphere” theorem gives quantitative bounds for size of the preimage of some point: for any map with , there is a point such that -neighborhoods of have volume bounded below by the volume of the -neighborhood of an -dimensional equator of [22, 23, 35]. Here we investigate quantified generalizations of the Borsuk–Ulam theorem for maps to Euclidean space of dimension greater than ; see [33] for a different generalization. While a generic odd map for does not have a zero, we will show that a convex combination of function values must achieve zero for points contained in a set of diameter strictly less than . Further, the diameter bounds obtained are sharp for maps of the form , , and .
In the following, denotes the diameter of a regular -simplex inscribed into , where carries the standard spherical metric and where each great circle has length .
Theorem 1.
If is odd and continuous, then there is a subset of diameter at most such that contains the origin.
This result generalizes, with the same diameter bound, to odd maps . When , we recover the classic Borsuk–Ulam theorem.
Theorem 2.
If is odd and continuous, then there is a subset of diameter at most such that contains the origin.
We remark that the diameter bound obtained in Theorem 2 also applies to odd and continuous maps ; indeed, restricted to the equator is odd and continuous with the same codomain.
Theorem 3.
If is odd and continuous, then there is a subset of diameter at most such that contains the origin.
The diameter bounds in Theorems 1 and 3 are optimal. In the case of the circle, there exist odd maps already into one dimension lower such that misses the origin for any set of diameter less than . Constructing such an example map also proves a result about the structure of zeros of raked trigonometric polynomials, which we explain next.
The structure of zeros of raked trigonometric polynomials.
A trigonometric polynomial is an expression of the form , inducing a map . In the case that we call a homogeneous trigonometric polynomial. The set of integers with or is called the spectrum of , and the largest integer in is the degree of . The spectrum of constrains the set of roots of ; for example, if is homogeneous of degree then it has a root on any closed circular arc of length ; see [9, 20]. Kozma and Oravecz in [29] give upper bounds on the length of an arc where a trigonometric polynomial with spectrum bounded away from zero (that is, ) is non-zero. If the spectrum of consists only of odd integers, then is called a raked trigonometric polynomial. We show the following structural result about the roots of raked trigonometric polynomials:
Theorem 4.
Let be such that . Then there is a raked homogeneous trigonometric polynomial of degree that is positive on . Moreover, there is a set of diameter such that no raked homogeneous trigonometric polynomial of degree is positive on .
The symmetric moment curve and the Barvinok–Novik orbitope.
The relation between Theorems 1 and 4 is explained by choosing to be the symmetric moment curve
which is an odd function. The convex hull of the curve is referred to as the Barvinok–Novik orbitope . Now, Theorem 1 implies that there is a set of diameter such that captures the origin. Thus, for any given , the inner product changes sign in since no hyperplane can separate from the origin. For varying , these inner products range over all possible raked homogeneous trigonometric polynomials, giving the second part of Theorem 4.
The geometry of the Barvinok–Novik orbitope also shows that the bound in Theorem 1 is optimal:
Theorem 5.
Let be such that . Then the convex hull does not contain the origin if , and this bound is sharp.
This also shows that, given with , there is a raked trigonometric polynomial of degree that is positive on .
Metric thickenings of the circle.
For any metric space , we get a continuum spectrum of metric spaces , , of Vietoris–Rips metric thickenings that capture the local connectivity of [3]. Note that the superscript is used here to denote the metric thickening of the Vietoris–Rips complex, as opposed to the geometric realization, and is not a numerical parameter. A point in is a probability measure on with finite support of diameter at most . Recently, Vietoris–Rips thickenings have been used in topological data analysis and persistent homology [15, 16]; specifically, they allow for a growing filtration of topological spaces associated to a finite collection or sampling of data. Conjecturally, for the circle , this spectrum ranges over all odd-dimensional spheres until eventually becoming contractible.111These homotopy types are known for the Vietoris–Rips simplicial complexes [2], but not yet for the more natural Vietoris–Rips thickenings .
Conjecture 6.
For , the metric thickening is homotopy equivalent to the boundary of the Barvinok–Novik orbitope , i.e. to the odd-dimensional sphere .
As partial evidence towards this conjecture, we explain how Theorem 5 implies that, for scale parameter in this range, the -dimensional homology, cohomology, and homotopy groups of are nontrivial.
In Section 5, we show that Conjecture 6 is true up to , the side-length of an inscribed equilateral triangle, where . More importantly, we provide a geometric picture of why this homotopy equivalence is plausible for , as follows. For we define a continuous map via the centrally symmetric moment curve . We relate to the facial structure of the Barvinok–Novik orbitope by composing with the radial projection map . Finally, for we obtain the homotopy equivalence via a linear homotopy. This is the only step that we are currently unable to extend to large and ; the missing ingredient is a “diameter non-increasing” property for higher-dimensional Barvinok–Novik orbitopes (Conjecture 22).
To our knowledge, this is the first approach to determine the homotopy type of a Vietoris–Rips thickening by mapping the underlying metric space into a higher-dimensional Euclidean space. This technique is analogous to the “kernel trick” of machine learning, in which data is mapped into a higher dimensional space to illuminate the underlying structure of the data.
As a step towards understanding the relationship between metric thickenings of the circle and the Barvinok–Novik orbitopes, we show that given arbitrary , there exists a raked homogeneous trigonometric polynomial of degree with a root at each and its antipode. Further, the polynomial alternates signs between these roots, has no other roots in , and may be written down explicitly in terms of the parameters (Theorem 26).
We remark that there is an analogous connection between the Čech thickenings of the circle and the Carathéodory orbitopes, i.e. the convex hull of the curve [38].
A preliminary version of several results in this paper appeared in the second author’s master’s thesis [14].
2. Preliminaries and related work
In this section we review notation and related work on topology, Vietoris–Rips simplicial complexes, metric thickenings, convex geometry, moment curves, and orbitopes.
Topological and metric spaces
We say two continuous maps are homotopic, written , if there exists a continuous map such that and for all [24]. Such a map is called a homotopy. We say and are homotopy equivalent, denoted , if there exist continuous maps and such that and . We furthermore write if spaces and are homeomorphic.
Given a set of points in a metric space , let the diameter of be ; this value may be infinite.
Conventions regarding
We equip with the geodesic metric (of total circumference ), though our results also hold when is instead equipped with the restriction of the Euclidean metric on . Unless otherwise stated, we will always take a representative as belonging to . Let , where , and where and are each identified with a point in . Define the open arc as
Define the closed arc similarly.
Vietoris–Rips simplicial complexes
We identify an abstract simplicial complex with its geometric realization, which is a topological space.
Definition 7.
Let be a metric space and fix . The Vietoris–Rips simplicial complex of with scale parameter , denoted , has as its vertex set and a finite subset as a simplex whenever .
A point in can be written in barycentric coordinates as , with . We emphasize that in this paper we are using the convention instead of the convention.
While the theorems of [25, 30] describe conditions under which the homotopy type of a manifold is recoverable from a Vietoris–Rips complex for sufficiently small , much less is known about the topological behavior of these constructions for large values of , even though large values of commonly arise in applications of persistent homology [16]. However, more is known in the specific case when the underlying manifold is the circle. The following theorem from [2] is based on [1, 4].
Theorem 8.
Let . There are homotopy equivalences
where , and where denotes the cardinality of the continuum.
Related papers include [19] which studies the 1-dimensional persistence of Čech and Vietoris–Rips complexes of metric graphs, [46] which extends this to geodesic spaces, [47] which studies approximations of Vietoris–Rips complexes by finite samples even at higher scale parameters, and [49] which applies Bestvina–Brady discrete Morse theory to Vietoris–Rips complexes.
Metric thickenings and optimal transport
When a metric space is not finite, it is often impossible222A simplicial complex (for example ) is metrizable if and only if it is locally finite [37, Proposition 4.2.16(2)]. to equip with a metric without changing the homeomorphism type. In such instances the simplicial complex destroys the metric information about the underlying space . This motivates the consideration of the Vietoris–Rips metric thickening, , which preserves metric information.
Let denote the Dirac delta mass at a point .
Definition 9 ([3]).
Let be a metric space and let . The Vietoris–Rips thickening is the set
equipped with the -Wasserstein metric.
This metric is also called the Kantorovich, optimal transport, or earth mover’s metric [42, 43, 44]; it provides a notion of distance between probability measures defined on a metric space. Although it exists much more generally [17, 27, 28], the -Wasserstein metric on can be defined as follows. Given with and , define a matching between and to be any collection of non-negative real numbers such that and . Define the cost of the matching to be . The -Wasserstein distance between is then the infimum, varying over all matchings between and , of the cost of .
Note that is isometric to . Contrary to the situation for an arbitrary Vietoris–Rips complex, the embedding into the Vietoris–Rips metric thickening given by is continuous. In fact, more is true: is an -thickening of [21, 3]. For this reason, we identify with the measure in the image of this embedding.
If is a complete Riemannian manifold with curvature bounded from above and below, then is homotopy equivalent to for sufficiently small [3, 6]. This property provides an analogue of Hausmann’s theorem [25] for metric thickenings.
Given a measure with , we denote the support of by .
Convex geometry
Convex geometry is the study of convex sets, especially polytopes and their facial structures [50]. Given an arbitrary subset , we let
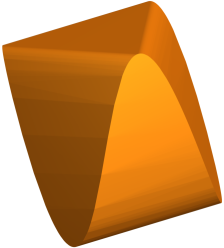
denote the convex hull of . For example, Figure 1 shows the convex hull of the image of the map defined by . Similarly, the conical hull of is
Let be convex. Define a face of to be any convex set such that, given , if for some and , then .
The centrally symmetric trigonometric moment curve
The centrally symmetric moment curve is analogous to the trigonometric moment curve, with the additional property that it is symmetric under reflecting through the origin.
Definition 10.
For , the centrally symmetric moment curve is defined by
Here we identify the domain with . Since , we say that is centrally symmetric about the origin. Interestingly, this curve is closely related to the multidimensional scaling (MDS) embedding of the geodesic circle [5, 12, 26, 48]; multidimensional scaling is a way to map a metric space into Euclidean space in a way that distorts the metric (in some sense) as little as possible.
Barvinok–Novik orbitopes
The Barvinok–Novik orbitope is defined by [11]. This convex body is not the convex hull of a finite set of points; it is an orbitope instead of a polytope [38].
The faces of are known for ; a subset of these faces are visible in Figure 1 (which is in instead of ).
Theorem 11 ([11, 40]).
The proper faces of are
-
•
the 0-dimensional faces (vertices) for ,
-
•
the 1-dimensional faces (edges) where are the edges of an arc of of length at most , and
-
•
the 2-dimensional faces (triangles) for .
Though the facial structure of the Barvinok–Novik orbitopes is not known for , certain neighborliness results have been established [10]. Sinn has shown that the orbitopes are simplicial [39]. Additionally, Vinzant proved that the edges of consist of all line segments with [45]. In other words, the edges of are the same as the edges of . The following is an immediate corollary of the work of Sinn and Vinzant.
3. A generalization of the Borsuk–Ulam theorem
The Borsuk–Ulam states that if is continuous, then there exists a point with [34]. For maps into lower-dimensional Euclidean space, there is a generalization due to Gromov called the “waist of the sphere” theorem [22, 23, 35]. The theorem says that if is continuous with , then there is some point such that the -neighborhoods of have volume at least as large as the volume of the -neighborhood of an -dimensional equator of . There are also versions in which the size of a preimage is measured by its diameter; this is called the Urysohn width [7, 32, 41]. In this section, we ask: what can be said for maps with ?
We say a map is odd or centrally-symmetric if for all . An equivalent formulation of the Borsuk–Ulam states that if is continuous and odd, then there exists a point with [34, Theorem 2.1.1].
More generally, given topological spaces and equipped with -actions and respectively, we say a map is odd or -equivariant if . Additionally, we always equip with the standard antipodal -action specified by . For our purposes, we consider another useful reformulation of the Borsuk–Ulam theorem as follows. Given an -connected space , [34, Proposition 5.3.2(iv)] states that there is no -equivariant map from into . Hence, any odd map must hit the origin, because otherwise we would obtain an odd map .
In Theorems 1, 2, and 3 we prove the generalizations of the Borsuk–Ulam thoerem for maps with . The first result is for .
Theorem 1.
If is odd and continuous, then there is a subset of diameter at most such that contains the origin.
Equivalently, if is continuous, then there exists a subset of diameter at most such that , for some choice of convex coefficients .
For example, if , then this set is easy to find: we can let be evenly-spaced points on the circle. Theorem 5 shows that the above diameter bound is sharp, both for maps and for maps . Indeed, is an odd map in which the convex hull of the image of every set of diameter strictly less than misses the origin.
Proof.
Fix ; this ensures . The induced map given by is odd with domain by Theorem 8. By the Borsuk–Ulam theorem, this map has a zero, giving a subset of diameter at most with containing the origin. Furthermore, by Carathéodory’s theorem, we can take the size of to be at most . It remains to reduce the diameter to by a compactness argument.
For each integer , we obtain a subset of diameter bounded above by , of size , and with . If , then duplicate an arbitrary point in to obtain a multi-set of size exactly . Arbitrarily order these points so that can be thought of as a point in the torus . By compactness of the torus, the sequence has a subsequence converging to a limit configuration of diameter at most and with . Removing duplicate points (and ignoring the ordering) gives us the desired subset . ∎
We remark that Theorem 1 may also be proven using the Barvinok–Novik orbitopes and Corollary 12, though this perspective does not generalize as nicely for the proofs of Theorems 2 and 3. In particular, an odd and continuous map defines a continuous map obtained by extending linearly to convex combinations of points in . Then, induces an odd and continuous map factoring through the well-defined inclusion (this inclusion exists by Corollary 12). Since is homeomorphic to a -sphere and hence -connected, we may apply [34, Proposition 5.3.2(iv)] to obtain the result. This approach depends crucially on known properties of the boundary of the Barvinok–Novik orbitope and does not immediately generalize to maps from higher-dimensional spheres.
Corollary 13.
Fix a list of odd continuous functions for . Let be the set of functions of the form defined by with . Then there is a subset of diameter at most such that no function in is positive on .
Proof.
Consider the odd map given by . Note that each function is specified by a vector , in the sense that for all . By Theorem 1, there exists a subset of diameter at most such that contains the origin. Hence, if we write with for , then . In particular, must be non-positive for at least some . ∎
Corollary 14.
Fix a list of odd degrees for , and fix a list of trigonometric functions or . Let be the set of all polynomials of the form with . Then there is a subset of diameter at most such that no polynomial in is positive on .
For example, the above corollary applies if is the set of all raked homogeneous trigonometric polynomials of degree at most , namely
after noting that we are considering the special case in which one of the constants defining is zero.
We also show the sharpness of the above result: the number of summands defining the trigonometric polynomial cannot be increased, and the upper bound on the diameter of can not be decreased, giving the first part of Theorem 4.
Corollary 15.
Given a subset of diameter less than , there exists a raked homogeneous trigonometric polynomial of degree that is positive on all of the points in .
Proof.
This result is a corollary of Theorem 5 in Section 4, which says that the convex hull does not contain the origin. Hence, there is a separating hyperplane with orthogonal vector given by such that . Therefore, the raked homogeneous trigonometric polynomial of degree given by is positive on all of the points in . ∎
We give two versions of the Borsuk–Ulam theorem for maps with , now also with . Our results would be strengthened if we better understood the homotopy types of Vietoris–Rips thickenings of -spheres for at all scale parameters.
The first version generalizes Theorem 1 (take ) to maps from odd-dimensional spheres into Euclidean spaces of higher dimensions.
Theorem 2.
If is odd and continuous, then there is a subset of diameter at most such that contains the origin.
Proof.
The case of follows from the standard Borsuk–Ulam theorem.
For , we will think of as a join of circles . Explicitly, if is viewed as the unit sphere in , then the subset of with all coordinates zero, with the (possible) exception of coordinates and , is a circle. The distance between any two points in distinct such circles is in the geodesic metric. Let . Since implies , this will allow us to construct a -equivariant embedding of into . In barycentric coordinates, a point in can be written as , where the vertex set of the simplex containing this point has diameter at most and where the positive coefficients sum to one. Hence, a point in consists of collections of such points for , along with non-negative numbers that add up to one. We map the points in to the -th copy of in , and we multiply their weights by . This gives the barycentric coordinates of a well-defined point in ; the diameter of the supporting simplex is at most since . Furthermore, this map respects the antipodal -actions on and ; these actions are free since antipodal points are at distance apart. By Theorem 8 we have
It follows from [34, Proposition 5.3.2(iv)] that any odd map from , and hence also from , into hits the origin. This gives a subset of diameter at most such that contains the origin. By a compactness argument as in the proof of Theorem 1, we can reduce this diameter to exactly . ∎
In the following theorem, is the diameter of an inscribed regular -simplex in .
Theorem 3.
If is odd and continuous, then there is a subset of diameter at most such that contains the origin.
This diameter bound is sharp, both for maps and maps . Indeed, the standard inclusion is an odd map that satisfies for all of diameter less than [31, Proof of Lemma 3].
Proof.
The space has a free -action that maps the convex combination of Dirac measures for points on to , that is, to the measure that is supported on the antipodal point set with the same weights . This action is free since antipodal points on are farther than apart.
Let be odd and continuous. Because is bounded, [3, Lemma 5.2] implies that induces a continuous map defined by . Notice that commutes with the antipodal action on and :
Next, fix a regular -simplex inscribed in , and let denote the group of rotational symmetries of , that is, the alternating group on elements. In a noncanonical fashion, we may identify as a subgroup of by associating to each the matrix such that for each vertex of . In this way, we obtain the orbit space of under the action of by left multiplication. Theorem 5.4 of [3] states that the homotopy type of is , and because is connected, its -fold suspension is -connected. Thus, the map , as a -equivariant map from an -connected space to , has a zero [34, Proposition 5.3.2(iv)]. That is, there are points that are pairwise at distance at most and such that for some with . ∎
4. Diameter bound for Carathéodory sets on the symmetric moment curve
Let be a set in Euclidean space. Carathéodory’s theorem states that if the convex hull of contains the origin, then there is a subset of of at most points whose convex hull also contains the origin. We say that is a Carathéodory subset of if the convex hull of contains the origin. The following theorem gives a lower bound on the diameter of the preimage of any Carathéodory subset of the symmetric moment curve in . Here, the circle is equipped with the geodesic metric of total circumference .
Theorem 5.
Let be such that . Then the convex hull does not contain the origin if , and this bound is sharp.
To prove Theorem 5, we may restrict attention to subsets of of size at most by Carathéodory’s theorem. Suppose is such that the origin is contained in the convex hull of . Then, there exist scalars such that and . In this way, we obtain a system of equations
We therefore let be the matrix
and consider the vector equation . To prove Theorem 5, we build towards describing the nullspace of , which we complete in Lemma 18.
Lemma 16.
Let denote the matrix whose columns are . Then for some nonzero constant depending only on .
We would like to thank Harrison Chapman for the insights behind the proof of Lemma 16. The main idea of the proof is to perform elementary row and column operations to to obtain a Vandermonde matrix. In addition to the general case, the simpler case of this proof is written out in more detail in [14]. The determinant of a related matrix is given in [18].
A Vandermonde matrix is an matrix of the form
Its determinant is ; see for example [36, Section 2.8.1].
Proof of Lemma 16.
We will perform elementary row and column operations to to obtain a Vandermonde matrix. Given , define the function via for . Since
we have
Next, let denote the -th column of the above matrix. For , perform the column operations , and then after each has been updated, perform the column operations . It follows that
by factoring out column multiples. Letting , we may factor from row to obtain
where is the column of all ’s. After re-ordering rows by a permutation and taking the determinant of the resulting Vandermonde matrix, we have
Finally, note , and multiply each term above by the factor extracted from to obtain
where . ∎
The following corollary is immediate.
Corollary 17.
For , let denote the matrix obtained by removing the -th column of . Then
for some nonzero constant depending only on .
Lemma 18.
If no two points are equal or antipodal, then the nullspace of is one-dimensional and is spanned by , where
Proof.
Because has rows and columns, it has nullity at least one. Further, by Corollary 17, observe that is invertible if and only if no two points are equal or antipodal. Hence, contains linearly independent columns and has nullity exactly one.
Next, we prove is contained in the nullspace of . To ease notation, write
Note , and hence for we have
Therefore, is equal to times the determinant of the matrix
Since for some , the first row of this matrix is equal to one of the other rows. Hence, the matrix is singular, giving that .
Similarly, it follows that is equal to times the determinant of the same matrix, except with the first row replaced by . For the same reasons as before, it follows that . ∎
For convenience, we rescale by (which is well-defined for distinct) to obtain
Recall that entries of correspond to coefficients in the linear combination . In particular, we are concerned only with convex linear combinations. Hence, after normalizing (and potentially rescaling by ), it is necessary that each entry is positive. In other words, the origin may be contained in the convex hull of only in the case that the terms share the same sign. We next relate the sign of each term to the configuration of points .
Lemma 19.
Let , with no two points equal or antipodal. Then, the numbers have the same sign for all if and only if for all .
Proof.
Throughout, we assume that the points are distinct, with no two points antipodal, and furthermore that they are ordered by index with a counterclockwise orientation. Observe that .
We first prove two preliminary properties.
-
(i)
.
-
(ii)
If are not all contained in a semicircle, then for , where we set .
For (i), note that since no two points are equal or antipodal, we have that if and only if . Therefore .
For (ii), observe that the open arc contains exactly points. Indeed, contains exactly points for all if and only if for all , which is true if and only if the points are not contained in a semicircle. Hence, must contain exactly points. Because this number is non-negative, it follows that .
We now prove Lemma 19. In the case that for all , we see that the numbers are all positive or are all negative.
Conversely, suppose the numbers have the same sign. Since , the numbers have the same parity. Further, in the case is odd (resp. even), (i) implies each is odd (resp. even). Therefore, in either case, we may write for some integer . Note that (i) implies
giving . Therefore, it is sufficient to prove that for all . Toward that end, define and , and observe
It cannot be the case that all of the points are contained in a semicircle, since then would obtain all of the values , contradicting the fact that these values have the same parity. Therefore, we may apply (ii) to obtain
which implies for all . Together with , this gives for all . ∎
We are now prepared to prove Theorem 5.
Proof of Theorem 5.
Let distinct be given in counterclockwise order, and define . We claim that if for all , then . Indeed, define and let be the length of for all . Because , it follows that there exists exactly one point in the arc Further, because the function defined by is minimized at the midpoint of , it follows that . On the other hand, because there are consecutive pairs of points , we must have for some . Hence .
Therefore, if , then for some . Hence Lemmas 18 and 19 imply that there do not exist positive scalars with .
To see that this bound is sharp, let denote the vertices of a regular inscribed -gon. Note that in this case. ∎
5. A connection between metric thickenings and orbitopes
We now connect the Vietoris–Rips metric thickenings of the circle to the Barvinok–Novik orbitopes. Indeed, we conjecture (Conjecture 6) that for , the metric thickening is homotopy equivalent to the boundary of the Barvinok–Novik orbitope, i.e. to the odd-dimensional sphere . We are able to show the partial result that the -dimensional homology, cohomology, and homotopy groups of are nontrivial; we only obtain the full homotopy type for .
Towards Conjecture 6, we build the following sequence of maps:
This construction will proceed as outlined below.
-
(1)
Section 5.1: We define the radial projection map . We extend the domain of to , and note that the composition is well-defined.
-
(2)
Section 5.2: We define the inclusion . Since , we obtain that the -dimensional homology, cohomology, and homotopy groups of are nontrivial.
-
(3)
Section 5.3: We prove that and are homotopy inverses; this is the step that we can currently only complete for (and hence ).
When and , this proof is quite easy to interpret. The map maps the space to an annulus missing the origin in (see Figure 2). Map radially projects the annulus to its outer circle, and map includes the circle back into .
As a result of step (3), we obtain . Note that . We think of the metric thickening as having the “right” homotopy type, whereas the wild homotopy type of the simplicial complex is an artifact of it being equipped with the “wrong” topology333The inclusion is not continuous. As further evidence for being more interested in the homotopy type rather than , note that for all we have ..
There is an analogous relationship between the Čech thickenings of the circle and the Carathéodory orbitopes, i.e. the convex hull of the curve [38]. We do not detail that connection here, although some connections between Čech complexes of finite points on the circle and cyclic polytopes (convex hulls of finite sets of points from this trigonometric moment curve) are given in [4].
5.1. Map from the Vietoris–Rips thickening to the Barvinok–Novik orbitope
We first define the radial projection map . As is a convex body containing the origin in its interior, each ray emanating from the origin intersects exactly once. Hence, is well-defined.
We extend to by declaring . Here the sum on the left-hand side defines a measure as a convex sum of Dirac delta functions at the points (of diameter at most ), whereas the sum on the right-hand side is a sum of vectors in . Because restricted to is continuous and bounded, Lemma 5.2 of [3] proves that this extension to all of is continuous.
Finally, suppose . Then, Theorem 5 implies that the origin is not in the image of the map , and hence the composition from the Vietoris–Rips thickening to the boundary of the Barvinok–Novik orbitope is well-defined.
5.2. Inclusion from the Barvinok–Novik orbitope boundary to the Vietoris–Rips thickening
For , we define the map as follows. Given a point with for all , let . Recall that Corollary 12 states every face of is a simplex whose diameter in (not in ) is at most , and hence the image of indeed lands in . We now prove that is continuous.
Lemma 20.
Let . The map is continuous.
Proof.
Recall is the radial projection to the boundary of . We will show that
is a bijective continuous function from a compact space to a Hausdorff space. It will then follow from [8, Theorem 3.7] that is a homeomorphism, with a continuous inverse . Therefore is continuous.
The fact that is a bijective function follows from Corollary 12. The space is Hausdorff since it inherits the subspace topology from Euclidean space. Finally, to see that is compact, we note that is a closed subset of , the space of all Radon probability measures on equipped with the Wasserstein metric. Since is compact, it follows that is compact by [44, Remark 6.19], and therefore is compact as a closed subset of a compact space. ∎
We can now give the following corollary of Theorem 5.
Corollary 21.
For , the -dimensional homology, cohomology, and homotopy groups of are nontrivial.
Proof.
Theorem 5 implies that for in this range of values, the map is the identity map on , i.e. that the space is a retract of . ∎
5.3. Show and are homotopy inverses.
We conjecture that the composition has a controllable effect on the diameter of any measure in the Vietoris–Rips thickening.
Conjecture 22.
Given and , we conjecture
Proof.
As observed in the proof of Corollary 21, we have that . Hence, it remains only to show that . We will do so using the simplest possible homotopy, a linear homotopy. Indeed, consider the linear homotopy defined by
Conjecture 22 would imply that is well-defined, and hence also continuous by Lemma 3.8 of [3]. Note and . Hence, this would imply . ∎
We remark that Conjecture 22 is true for , giving for .
The remainder of this section is devoted to proving that Conjecture 22 is true for , and hence . In order to prove this, we first describe a number of intermediate lemmas.
The first such lemma, Farkas’ Lemma, characterizes when a vector lies in the convex cone generated by a set of vectors. Let .
Lemma 24 (Farkas’ Lemma [13]).
Let , let for denote the columns of , and let . Then, exactly one of the following is true:
-
(1)
There exists such that .
-
(2)
There exists such that for all and .
Case (1) above is equivalent to , and case (2) is equivalent to . We can use Farkas’ Lemma to study how cones intersect.
Lemma 25.
Let . If there exists some such that for and for , then .
Proof.
Suppose such a vector exists, and let . Then, because there exists some with , we have . Hence, by Lemma 24, is not contained in the convex cone generated by . ∎
The following theorem will be used to construct a vector satisfying the hypotheses of Lemma 25, given certain configurations of points along the curve .
Theorem 26.
Fix a positive integer and distinct with no two points antipodal. Let denote the set of points labeled in counterclockwise order such that . Then, there exists a raked homogeneous trigonometric polynomial of degree such that for . Further, for , where we define .
Proof.
For , consider points to be written as column vectors and define the matrix
By Lemma 16,
where is a nonzero constant that depends only on . Further, by considering the cofactor expansion of this determinant along the first column of , observe that is a raked homogeneous trigonometric polynomial of degree . Because no two elements of are equal or antipodal, note that . Hence,
is a well-defined raked homogeneous trigonometric polynomial of degree with real roots . Finally, observe for we have
where we define . ∎
Remark 27.
In the setting of Theorem 26, there exists a vector such that for all . Further, for , where we define .
Proposition 28.
Let distinct be in counterclockwise order and contained in an arc of length at most . Let distinct be such that is a face of , and . Then
For the above proposition we agree .
Proof.
Throughout, for convenience, consider points to be written as column vectors. In light of the known facial structure of (Theorem 11), it follows that . Hence, there are three cases:
-
(i)
The sets and are disjoint.
-
(ii)
The sets and contain one point of intersection. In this case, , i.e. determines an edge or an equilateral triangle in .
-
(iii)
The sets and contain two points of intersection. In this case, , the points determine an equilateral triangle in , , and the length of is .
The proof will proceed as follows. We will consider first the case that and are disjoint and apply Lemma 25 to prove that the resulting cones in must be disjoint. Then, we will generalize this argument to allow for intersections and consider the remaining two cases.
Toward that end, suppose and note, by Lemma 25, that it is sufficient to find such that for and for . To define such a vector , fix points as follows. By the assumptions on the configuration of the points , observe there must exist an arc of length such that
-
•
,
-
•
, and
-
•
for .
Indeed, to see that we can arrange , note that if then are the vertices of an equilateral triangle, and hence not in an arc of length . To see that we can arrange , note that if , then since one of the points is outside , we can choose so that the same point is also outside .
If , define , with small enough such that both and . Then, define and so that , , , and appear in counterclockwise order.
If , assume without loss of generality that . Then, define and . Choose small enough such that does not contain any point in and furthermore so that . Such points must exist because no two elements of are antipodal. Finally, define , with small enough such that both and .
Now, apply Remark 27 to obtain such that for , we have
where . When we consider the case for , we note by construction that is even for each , and so for .
On the other hand, in the case , we note that and for . Finally, in the case , note that and . Further, the pair has zero net effect on the parity of for by the fact that . Hence, for .
This concludes the proof of case (i) that when
Next, consider case (ii). Assume without loss of generality that and write for some . Given , write for some non-negative scalars . To show , observe that it is sufficient to prove for all . We consider the possibilities and separately.
If , then
It follows that . Hence, because , we have obtained a configuration of points satisfying the hypotheses of case (i) of this proof. Therefore, and by Corollary 29 of case (i) below, it follows that and for all .
If , then . That is,
As before, because we have obtained a configuration of points satisfying the hypotheses of case (i) of this proof. Hence , and by Corollary 29 of case (i), it follows that for all . This concludes the proof for case (ii).
Last, observe that case (iii) follows by a similar trick: by rewriting a vector contained in the intersection of both cones, we may obtain a configuration of points satisfying the hypotheses of case (i) or case (ii). ∎
We emphasize that the following is a corollary of case (i) only in the proof of Proposition 28; indeed it is used in the proof of case (ii).
Corollary 29.
Let distinct be in counterclockwise order and contained in an arc of length at most . If with , then for all .
Proof.
The claim is obvious in the case . Otherwise, because we may write , with . With observe that the hypotheses of case (i) of Proposition 28 are satisfied, implying
Since is in this intersection of cones, this implies . Hence , and we may proceed iteratively to conclude for all . ∎
We are now ready to prove that the “diameter non-increasing” result in Conjecture 22 is true for .
Proposition 30.
For , we have .
6. Conclusion
We provide a lower bound on the diameter of a Carathéodory set in the centrally symmetric trigonometric moment curve, i.e., a set whose convex hull contains the origin. As applications, we obtain sharp versions of the Borsuk–Ulam theorem for maps into higher-dimensional codomains, and we gain control over the zeros of raked trigonometric polynomials. Furthermore, we provide a geometric proof (taking advantage of continuous maps afforded by the optimal transport metric) that the Vietoris–Rips metric thickening of the circle achieves the homotopy type of the 3-sphere at scale parameter , in contrast to the uncountably infinite wedge-sum of 2-spheres attained by the ordinary Vietoris–Rips complex on the circle. This proof reveals connections between Vietoris–Rips thickenings of the circle and the Barvinok–Novik orbitopes ; analogous connections exist between Čech thickenings of the circle and the Carathéodory orbitopes.
7. Acknowledgements
References
- [1] Michał Adamaszek. Clique complexes and graph powers. Israel Journal of Mathematics, 196(1):295–319, 2013.
- [2] Michał Adamaszek and Henry Adams. The Vietoris–Rips complexes of a circle. Pacific Journal of Mathematics, 290(1):1–40, 2017.
- [3] Michał Adamaszek, Henry Adams, and Florian Frick. Metric reconstruction via optimal transport. SIAM Journal on Applied Algebra and Geometry, 2(4):597–619, 2018.
- [4] Michał Adamaszek, Henry Adams, Florian Frick, Chris Peterson, and Corrine Previte-Johnson. Nerve complexes of circular arcs. Discrete & Computational Geometry, 56(2):251–273, 2016.
- [5] Henry Adams, Mark Blumstein, and Lara Kassab. Multidimensional scaling on metric measure spaces. Accepted to appear in Rocky Mountain Journal of Mathematics, arXiv preprint arXiv:1907.01379, 2019.
- [6] Henry Adams and Joshua Mirth. Vietoris–Rips thickenings of Euclidean submanifolds. Topology and its Applications, 254:69–84, 2019.
- [7] Arseniy Akopyan, Roman Karasev, and Alexey Volovikov. Borsuk–Ulam type theorems for metric spaces. arXiv preprint arXiv:1209.1249, 2012.
- [8] Mark Anthony Armstrong. Basic Topology. Springer Science & Business Media, 2013.
- [9] Alexander G Babenko. An extremal problem for polynomials. Mathematical Notes, 35(3):181–186, 1984.
- [10] Alexander Barvinok, Seung Jin Lee, and Isabella Novik. Neighborliness of the symmetric moment curve. Mathematika, 59(1):223–249, 2013.
- [11] Alexander Barvinok and Isabella Novik. A centrally symmetric version of the cyclic polytope. Discrete & Computational Geometry, 39(1-3):76–99, 2008.
- [12] JM Bibby, JT Kent, and KV Mardia. Multivariate analysis. Academic Press, London, 1979.
- [13] Stephen Boyd and Lieven Vandenberghe. Convex optimization. Cambridge University Press, 2004.
- [14] Johnathan Bush. Vietoris–Rips thickenings of the circle and centrally-symmetric orbitopes. Master’s thesis, Colorado State University, 2018.
- [15] Gunnar Carlsson. Topology and data. Bulletin of the American Mathematical Society, 46(2):255–308, 2009.
- [16] H. Edelsbrunner and J. Harer. Computational Topology: An Introduction. AMS, Providence, 2010.
- [17] David A Edwards. On the Kantorovich–Rubinstein theorem. Expositiones Mathematicae, 29(4):387–398, 2011.
- [18] Jean Gallier and Dianna Xu. Computing exponentials of skew-symmetric matrices and logarithms of orthogonal matrices. International Journal of Robotics and Automation, 18(1):10–20, 2003.
- [19] Ellen Gasparovic, Maria Gommel, Emilie Purvine, Radmila Sazdanovic, Bei Wang, Yusu Wang, and Lori Ziegelmeier. A complete characterization of the one-dimensional intrinsic Čech persistence diagrams for metric graphs. In Research in Computational Topology, pages 33–56. Springer, 2018.
- [20] Anthony D Gilbert and Christopher J Smyth. Zero-mean cosine polynomials which are non-negative for as long as possible. Journal of the London Mathematical Society, 62(2):489–504, 2000.
- [21] Mikhail Gromov. Geometric group theory, volume 2: Asymptotic invariants of infinite groups. London Mathematical Society Lecture Notes, 182:1–295, 1993.
- [22] Mikhail Gromov. Isoperimetry of waists and concentration of maps. Geometric & Functional Analysis GAFA, 13(1):178–215, 2003.
- [23] Larry Guth. The waist inequality in Gromov’s work. The Abel Prize, 2012:181–95, 2008.
- [24] Allen Hatcher. Algebraic Topology. Cambridge University Press, Cambridge, 2002.
- [25] Jean-Claude Hausmann. On the Vietoris–Rips complexes and a cohomology theory for metric spaces. Ann. Math. Studies, 138:175–188, 1995.
- [26] Lara Kassab. Multidimensional scaling: Infinite metric measure spaces. Master’s thesis, Colorado State University, 2019. arXiv preprint arXiv:1904.07763.
- [27] Hans G Kellerer. Duality theorems for marginal problems. Zeitschrift für Wahrscheinlichkeitstheorie und verwandte Gebiete, 67(4):399–432, 1984.
- [28] Hans G Kellerer. Duality theorems and probability metrics. In Proceedings of the Seventh Conference on Probability theory, Braşov, Romania, pages 211–220, 1985.
- [29] Gady Kozma and Ferencz Oravecz. On the gaps between zeros of trigonometric polynomials. Real Analysis Exchange, 28(2):447–454, 2002.
- [30] Janko Latschev. Vietoris–Rips complexes of metric spaces near a closed Riemannian manifold. Archiv der Mathematik, 77(6):522–528, 2001.
- [31] Lásló Lovász. Self-dual polytopes and the chromatic number of distance graphs on the sphere. Acta Scientiarum Mathematicarum, 45(1-4):317–323, 1983.
- [32] Aleksander Maliszewski and Marcin Szyszkowski. Level sets on disks. The American Mathematical Monthly, 121(3):222–228, 2014.
- [33] Andrei V Malyutin and Oleg R Musin. Neighboring mapping points theorem. arXiv preprint arXiv:1812.10895, 2018.
- [34] Jiří Matoušek. Using the Borsuk–Ulam theorem. Springer Science & Business Media, 2008.
- [35] Yashar Memarian. On Gromov’s waist of the sphere theorem. Journal of Topology and Analysis, 3(1):7–36, 2011.
- [36] William H Press, Saul A Teukolsky, William T Vetterling, and Brian P Flannery. Numerical recipes 3rd edition: The art of scientific computing. Cambridge University Press, 2007.
- [37] Katsuro Sakai. Geometric aspects of general topology. Springer, 2013.
- [38] Raman Sanyal, Frank Sottile, and Bernd Sturmfels. Orbitopes. Mathematika, 57(02):275–314, 2011.
- [39] Rainer Sinn. Algebraic boundaries of -orbitopes. Discrete & Computational Geometry, 50(1):219–235, 2013.
- [40] Zeev Smilansky. Convex hulls of generalized moment curves. Israel Journal of Mathematics, 52(1):115–128, 1985.
- [41] Vladimir Mikhailovich Tikhomirov. Some problems in approximation theory. Mathematical notes of the Academy of Sciences of the USSR, 9(5):343–350, 1971.
- [42] Anatoly Moiseevich Vershik. Long history of the Monge–Kantorovich transportation problem. The Mathematical Intelligencer, 35(4):1–9, 2013.
- [43] Cédric Villani. Topics in optimal transportation. Number 58. American Mathematical Soc., 2003.
- [44] Cédric Villani. Optimal transport: Old and new, volume 338. Springer, 2008.
- [45] Cynthia Vinzant. Edges of the Barvinok–Novik orbitope. Discrete & Computational Geometry, 46(3):479–487, 2011.
- [46] Žiga Virk. 1-dimensional intrinsic persistence of geodesic spaces. Topology and Analysis, 2019.
- [47] Žiga Virk. Approximations of 1-dimensional intrinsic persistence of geodesic spaces and their stability. Revista Matemática Complutense, 32:195–213, 2019.
- [48] John Von Neumann and Isaac Jacob Schoenberg. Fourier integrals and metric geometry. Transactions of the American Mathematical Society, 50(2):226–251, 1941.
- [49] Matthew C. B. Zaremsky. Bestvina–Brady discrete Morse theory and Vietoris–Rips complexes. arXiv preprint arXiv:1812.10976, 2018.
- [50] Günter M Ziegler. Lectures on polytopes, volume 152. Springer Science & Business Media, 2012.