Minimal-order Appointed-time Unknown Input Observers: Design and Applications
Abstract
This paper presents a framework on minimal-order appointed-time unknown input observers for linear systems based on the pairwise observer structure. A minimal-order appointed-time observer is first proposed for the linear system without the unknown input, which can estimate the state exactly at the preset time by seeking for the unique solution of a system of linear equations. To further release the computational burden, another form of the appointed-time observer is designed. For the general linear system with the unknown input acting on both the system dynamics and the measured output, the model reconfiguration is made to decouple the effect of the unknown input, and the gap between the existing reduced-order appointed-time unknown input observer and the possible minimal-order appointed-time observer is revealed. Based on the reconstructed model, the minimal-order appointed-time unknown input observer is presented to realize state estimation of linear system with the unknown input at the arbitrarily small preset time. The minimal-order appointed-time unknown input observer is then applied to the design of fully distributed adaptive output-feedback attack-free consensus protocols for linear multi-agent systems.
keywords:
Appointed-time unknown input observer, minimal-order observer, attack-free protocol, consensus, ,
1 Introduction
The state estimation has been well investigated since the invention of the well-known Kalman filter [Kalman (1960)] and Luenberger observer [Luenberger (1964)] in 1960s, and various observers have been developed for linear or nonlinear systems [Hou et al. (2002); Deza et al. (1993); Ding (2012)]. The unknown input observer is a typical state estimation for the systems with external unknown inputs, which has attracted widespread attentions due to its resultful applications in the fields of fault diagnosis [Gao et al. (2016); Cristofaro et al. (2014)] and attack detection [Amin et al. (2013); Ameli et al. (2018)].
The generalized dynamic model of linear time-invariant system with unknown input can be formulated by
| (1) | ||||
where , , , are the state, the control input, the unknown input and the measurement output, respectively. In practice, the unknown input can represent the external disturbances, unmodeled dynamics or actuator failures.
The unknown input observer has been investigated from various perspectives. A procedure of the minimal-order unknown input observer was proposed in Wang et al. (1975) for the linear system (1) with , and the existence conditions were revealed in Kudva et al. (1980) that the rank of equals to that of and the triple has stable or even no invariant zeros. Following the conditions proposed in Kudva et al. (1980), full-order unknown input observers were designed in Yang et al. (1988); Darouach et al. (1994), and the reduced-order observers were presented in Hou et al. (1992); Syrmos et al. (1993). Syrmos et al. (1983); Hou et al. (1994) further studied the general model (1), and presented minimal-order observer design procedure as well as the existence conditions. Unknown input observers for discrete-time systems were illustrated in Syrmos et al. (1999); Sundaram et al. (2007, 2008), and Darouach et al. (1996); Koenig et al. (2002); Zhang et al. (2020) investigated the unknown input observer design for descriptor systems. The unknown input functional observers were designed in Sundaram et al. (2008); Trinh et al. (2008); Sakhraoui et al. (2020). Unknown input observers for the switched systems [Bejarano et al. (2011); Zhang et al. (2020)] and unknown input observers [Gao et al. (2016)] have also been well studied.
One common feature of the aforementioned unknown input observers is that the system state is estimated asymptotically. In practical applications such as the fault detection, it is desired to realize finite-time estimation of the state. Among all the categories of finite-time convergence, the strictest one is to reach convergence exactly at the preset time instant, which is named as appointed-time or specified-time convergence [Zhao et al. (2019)]. The appointed-time observer for linear systems without the unknown input was proposed in Engel et al. (2002), where a pairwise observer structure was designed, consisting of two Luenberger observers and achieving the appointed-time state estimation based on time-delayed observer information. By introducing a time-varying coordinate transformation matrix, a novel observer for linear systems was designed in Pin et al. (2020), which successfully realized the appointed-time state estimation with an arbitrarily small predetermined time. Based on the pairwise observer structure, the appointed-time observers for nonlinear systems were presented in Kreisselmeier et al. (2003); Menold et al. (2003), and the appointed-time functional observers for linear systems were studied in Raff et al. (2005). Li et al. (2015) further considered the appointed-time state estimation of nonlinear systems with measurement noise. The appointed-time observer for discrete-time systems was presented in Ao et al. (2018), where the applications on the attack detection were also investigated. Following the observer design structure of Engel et al. (2002), the appointed-time unknown input observer for linear system (1) with was proposed in Raff et al. (2006). Distributed appointed-time unknown input observers were further investigated in Lv et al. (2020a), based on which fully distributed attack-free consensus protocols were proposed for multi-agent systems.
Notice that the above-mentioned appointed-time observers based on the pairwise observer structure are either of full order , or of reduced order . From the point of view of realization, it is favourable to design minimal-order appointed-time observers, which is expected to be of order when . In this paper, we intend to answer whether such minimal-order appointed-time observer exists and how to design the observers.
For the linear system without the unknown input, we first give a thorough analysis of the pairwise observer design structure presented in Engel et al. (2002) to reveal how it works on realizing state estimation at the appointed time. That is, to build a system of linear equations in unknowns, and construct the observer expression based on the unique solution of the system of linear equations. Following such design methodology, the pairwise minimal-order observers with different poles are proposed, and a system of equations in unknowns is constructed by adding the equations of measured output at time instant as well as the delayed time instant . It is demonstrated that the coefficient matrix is invertible, which gives a unique solution to the system of linear equations. The appointed-time observer is then designed by taking the portion of the unique solution. To release the computation burden caused by calculating the inverse of the high-dimensional coefficient matrix, another form of the minimal-order appointed-time observer is formulated, whose structure is coincident with that of the full-order appointed-time observer in Engel et al. (2002).
For the linear system with the unknown input, we first reconstruct the model to decouple the effect of the unknown input, and exhibit both full-order and reduced-order appointed-time unknown input observers based on different reconstructed models. The gap between the reduced-order and expected minimal-order appointed-time unknown input observers is revealed, which motivates us to further decrease the observer order. Following the observer design structure of the minimal-order appointed-time observer for linear systems without the unknown input, the minimal-order appointed-time unknown input observer is obtained by designing the observer to estimate the state of the reconstructed model at the appointed time. The special case that the unknown input does not act on the measured output, i.e., , is also discussed. The proposed minimal-order appointed-time unknown input observer is then applied into the consensus problem of linear multi-agent systems, where distributed minimal-order appointed-time unknown input observer is put forward to estimate the consensus error by viewing the relative input among neighboring agents as the unknown input, and the distributed adaptive attack-free consensus protocol is presented based on the consensus error estimation. The proposed protocol possesses the feature of avoiding information transmission via communication channel, which takes the advantages of reducing the communication cost and being free from network attacks.
The rest of this paper is organized as follows. Section 2 presents the design structures of the minimal-order appointed-time observer for linear system (1) without unknown input . Section 3 further studies the minimal-order appointed-time unknown input observers. Section 4 applies the appointed-time unknown input observer into the design of fully distributed adaptive attack-free consensus protocols for linear multi-agent systems, and gives a simulation example to illustrate the effectiveness of the proposed methods. Section 5 concludes this paper.
Notations: Let be the set of matrices. represents the -dimensional identity matrix. Symbol represents a diagonal matrix with diagonal elements being . For a matrix , denotes its generalized inverse with and . For a square matrix , represents the real part of the -th eigenvalue of .
2 Minimal-order Appointed-time Observers
We first study the minimal-order appointed-time observer for linear systems without the unknown input, i.e., , or in model (1). Without loss of generality, we assume that is of full row rank.
2.1 Problem Analysis
Under the assumption that is observable, the full-order appointed-time observer was given in Engel et al. (2002) as
| (2) | ||||
where , with and as the gain matrices satisfying , is a negative constant, with , and is a positive constant.
The methodology of observer (2) is to construct a system of linear equations, which has a unique solution [Engel et al. (2002)]. Specifically, define and . Then, we have
| (3) | ||||
which contains linear equations in unknowns . The unique solution of can be calculated as in (2). Thus, it is concluded in Engel et al. (2002) that the observer (2) can estimate the exact value of at appointed time , i.e., .
To design minimal-order appointed-time observer, we can only construct two -order observers:
| (4) | ||||
where are gain matrices satisfying , and are matrices such that both and are controllable, and are respectively the unique solutions of the Sylvester equations
| (5) |
such that are invertible. Let .
It is well-known that each can exponentially converge to . Define , and we have
| (6) | ||||
It is clear that (6) contains equations in unknowns . As a result, cannot be uniquely determined by the above system of linear equations. To design minimal-order appointed-time observer, the main difficulty lies in constructing an appropriate system of linear equations to calculate a unique solution of .
2.2 Observer Design
To make the system of linear equations (6) have a unique solution, extra independent equations are required. It is natural to add the following equations:
| (7) | ||||
and the system of linear equations (6) and (7) can be written as
| (8) |
with , and
We now have equations in unknowns. The following result shows that the system of linear equations (8) has a unique solution.
Theorem 1.
Suppose that is observable. Then is invertible for almost all . Moreover, the observer
| (9) |
can estimate the state of the linear system (1) without the unknown input at appointed time .
Proof We only have to show the invertibility of , since the system of linear equations (8) has a unique solution if and only if is invertible, which gives for .
The invertibility of is equivalent to that the determinant of is nonzero, i.e., . Let
and we have
We can obtain that
Note that both are invertible. Let , and we have that . Thus,
On the other hand,
Since , we can obtain that as , which implies that as . Thus, the overall determinant with sufficiently large . Since the determinant is an analytic function of , it only has isolated zeros. Notice that when . Therefore, for almost all , . This completes the proof.
Remark 1.
Theorem 1 reveals that the minimal-order appointed-time observers do exist if is observable. Since has only isolated zeros and when , there exists such that , meaning that the predetermined time can be arbitrarily small. The methodology of the observer is to design two -order observers, and introduce delayed information of the observers as well as the measurement output to generate a system of linear equations in variables, where the coefficient matrix is invertible so that there is a unique solution for the system of linear equations. Compared to the existing works on designing appointed-time observer with the pairwise observer structure [Engel et al. (2002); Kreisselmeier et al. (2003); Menold et al. (2003); Li et al. (2015)], the observer (9) is in a minimal-order form with the design of -order dynamical variables and , which has the advantage of consuming lower computation cost.
2.3 Observer Reconstruction
It should be noticed that the coefficient matrix is of dimension, and the inverse of may not be easy to calculate when increases. Besides, the design of the observer (9) is quite different from that of the full-order observer in (2). In this subsection, we intend to reconstruct the appointed-time observer with the information of .
Define . Choose and such that . Let with . We can redesign the minimal-order appointed-time observer by
| (10) |
where .
Theorem 2.
Proof Note that
We can calculate that
And we have
where the last equality is obtained by noticing that and .
The remaining is to show the existence of , or the invertibility of the matrix , which is equivalent to demonstrate . Since
we have that
On the one hand, we have
On the other hand, note that
Since , we can obtain that as , which in turn implies that as ,
Thus, the determinant with sufficiently large . In light of the fact that the determinant is an analytic function of , it only has isolated zeros. Since when , exists for almost all . Therefore, for almost all , the minimal-order observer in (10) can estimate the state at appointed time .
Remark 2.
Both the observers (10) and (9) can realize appointed-time estimation of the state of the linear system (1) without the unknown input . In comparison to the observer (9) with the inverse of the dimensional matrix to be calculated, the observer (10) only needs to calculate the inverse of the dimensional matrix .
2.4 Methodology of Observer (10)
Note that the structure of the minimal-order appointed-time observer (10) is similar to that of the full-order observer (2). The intuitive explanation is given as follows.
Define , and . Under the observer (10), we have with . Thus, the main idea of the observer (10) is to introduce the extra zero variables and , and add the following equations:
| (11) | ||||
where is chosen according to the same requirement of .
Combining (6) and (11) yields a system of linear equations in variables as follows:
| (12) | ||||
Solving the above system of linear equations gives the appointed-time observer (10).
Remark 3.
Both the full-order observer (2) and the reduced-order observer (10) is obtained by solving the solution of the system of linear equations in variables; see (3) and (12). In light of the invertibility of the matrices and , it is not difficult to verify that both the coefficient matrix of the linear equations (3) and the coefficient matrix of the linear equations (12) are invertible, implying that both the linear equations (3) and (12) have the unique solution. Clearly, the main distinction between observer (2) and observer (10) lies in the introducing of nonsingular transformation matrices . Specifically, the observer and the measurement output forms the variable , which is to estimate ; while for the full-order observer (2), the variable can realize exponential estimation of . In this sense, the minimal-order appointed-time observer (10) and the full-order appointed-time observer (2) share the same design structure. Moreover, the appointed-time observer (10) degenerates into the observer (2) when .
Remark 4.
It is worth noting that the coefficient matrix in linear equations (8) has lower dimension compared with , but the expression of the observer (9) is more complicated than the observer (10). Such counterintuitive result is mainly caused by the special structure of the linear equations (12). Compared with the linear equations (8), the linear equations (12) contains the extra zero variables . Moreover, the measurement output equations are used twice, and the relation between the zero variables and is also introduced to construct the linear equations (12); while the design of the extra matrices plays a key role in deriving the observer (10).
3 Appointed-time Unknown Input Observers
In this section, we further extend the observer (10) into the minimal-order appointed-time observer for the linear system (1) in presence of the unknown input .
3.1 Model Reconfiguration and Full-order Observers
Since the unknown input acts upon both the dynamics and the measured output, we have to first get rid of it from the measured output. Let , and
Note that
which in turn gives
| (13) | ||||
with , , and . Let , and the following lemma is introduced.
Lemma 1 (Hou et al. (1994)).
The two statements are equivalent:
-
;
-
.
Let . We have
The dynamics of are then given by
| (14) | ||||
with and . If condition in Lemma 1 holds, the model (14) can be written as
| (15) | ||||
where .
Lemma 2 (Hou et al. (1994)).
Under condition in Lemma 1, the following two statements are equivalent:
-
;
-
is observable.
Note that
implying that . By Lemma 1 and Lemma 2, it is not difficult to derive that we can design the asymptotically convergent unknown input observer with minimal order , if the following assumption holds.
Assumption 1.
The system matrices satisfy the following two conditions:
-
;
-
.
Remark 5.
It is revealed in Hou et al. (1994) that is detectable if and only if condition in Assumption 1 holds for all in non-negative real part. For the case that , i.e., and , the state can be directly calculated by measurement output as , which appears to be the trivial state estimation case. In this paper, we only consider the case when .
Based on the pairwise observer structure of Engel et al. (2002), we can formulate the following observer:
| (16) | ||||
where with and being gain matrices such that , and with , and . Clearly, , and we have the following result.
3.2 Reduced-order Observer Design
The reduced-order appointed-time unknown input observer was designed in Raff et al. (2006) for the linear system (1) with . This subsection intends to present the corresponding observer when .
Decompose into with being of full column rank. Then the model (13) is rewritten as
| (17) | ||||
Choose such that is invertible. Let with and . Then, we have . Further choose such that is invertible, and let . The existence of can be derived by the following result.
Theorem 3.
Under Assumption 1, is of full column rank, i.e.,
Before proceeding, we first introduce the following lemma.
Lemma 3 (Hou et al. (1994)).
For any matrices and with appropriate dimensions, if and only if .
Now we are ready to demonstrate Theorem 3.
Proof of Theorem 3 Note that
In light of Lemma 3, we have
Thus, the statement that is of full column rank can be derived by noticing
Let . We have . The dynamics of can be described by
| (18) | ||||
where and .
The reduced-order appointed-time unknown input observer can be designed by following the observer structure in Raff et al. (2006) as follows.
| (19) | ||||
where , with being the gain matrices such that , and with , , and . It was revealed in Raff et al. (2006) that , and we have the following result.
Corollary 2.
Remark 6.
It should be pointed out that the order reduction of observer (19), compared with full-order observer (16), is mainly due to the different model reconfigurations. Specifically, to remove the effect of unknown input, model (15) adopts the variable with order , and model (18) uses variable with order . While the design structure and the principle of appointed-time estimation realization of the full-order observer (16) and the reduced-order observer (19) are the same.
3.3 The Gap Between Reduced-order and Minimal-order Observers
Since the minimal-order asymptotical observer is of order , the minimal-order appointed-time unknown input observer is expected to be of order . The following result shows that the expected minimal order is strictly smaller than the order of observer (19).
Theorem 4.
Suppose that Assumption 1 holds, and . Then,
Before proceeding, we first introduce the following lemma, the proof of which is omitted since it is a dual result of Lemma 3.
Lemma 4.
For any matrices and with appropriate dimensions, if and only if .
Now we are ready to show the proof of Theorem 4.
Proof of Theorem 4 Since and , it is equivalent to showing that .
By Theorem 3, we have . We then prove that the equality cannot hold by contradiction. Assume that , which implies that . By Lemma 4, we have . For ,
implying that has only zero eigenvalues. Since , we can obtain that . Let be the Jordan canonical form of with . Note that
implying that the first column of cannot be . Then the second column of is nonzero. However, . This completes the proof.
In view of Theorem 4, the order of the appointed-time observer can be further reduced. In the following subsection, we intend to design the appointed-time unknown input observer of the minimal order .
3.4 Minimal-order Observer Design
Since , can never be of full row rank if . Let be the matrix with its rows consisting of a maximal linearly independent set of the rows of . Denote . Clearly, under Assumption 1, is observable. Let . The dynamics of can be rewritten as
| (20) | ||||
Following the design steps of minimal-order appointed-time observer (10), we can formulate the appointed-time observer to estimate at appointed time as follows:
| (21) | ||||
where are the observer states, , are stable matrices which have no common eigenvalues with and , with , , , are the gain matrices such that are controllable, are the unique solutions of the Sylvester equations
| (22) |
such that the matrices are invertible with , and .
Then the minimal-order appointed-time unknown input observer is constructed by
| (23) |
Theorem 5.
Remark 7.
The common feature of the full-order observer (16) and the reduced-order observer (19) is that the two observer states are designed to asymptotically estimate the same variable. Specifically, in the full-order observer (16), both and are to estimate ; while in the reduced-order observer (19), both and are to estimate . In the minimal-order observer however, two observer states, namely and , are introduced to estimate different variables ( and , respectively). Consequently, we cannot construct any appropriate variable to be estimated at appointed-time with only and the delayed information . Instead, the variable is chosen to be estimated at appointed time . To generate the observer , not only the information of observer states , but also the output information at both time instants and are used.
For the special case , Assumption 1 degenerates into the following assumption.
Assumption 2.
The system matrices satisfy the following two conditions:
-
;
-
.
Let . It is revealed in Lv et al. (2020a) that Assumption 2 is equivalent to that and is observable. Without loss of generality, we assume that is of full row rank. Define . Denote . We have
And the minimal-order appointed-time unknown input observer for the linear system (1) with would be
| (24) | ||||
where are observer states, , are stable matrices which have no common eigenvalues with and , , , , , , are gain matrices such that are controllable, are the unique solutions of the Sylvester equations
such that the matrices are invertible with , and .
4 Applications on Attack-free Protocol Design for Multi-agent Systems
In this section, we intend to apply the minimal-order appointed-time unknown input observer (24) into the consensus problem of multi-agent systems.
Consider the linear multi-agent system consisting of agents, whose dynamics are given by
| (25) | ||||
where , and are respectively the state, the output and the control input of the -th agent.
The communication topology among the agents is described by a directed graph , where is the node set and is the edge set. The adjacency matrix is defined by if , and otherwise. The Laplacian matrix is defined by , and for .
In this section, we aim at designing fully distributed adaptive attack-free output-feedback protocol to realize consensus of the agents in (25), which is formulated in our previous work Lv et al. (2020b).
Problem 1 (Attack-free protocols).
Design fully distributed output-feedback protocol in the form
| (26) | ||||
with and as the nonlinear functions such that , .
The protocol in Problem 1 possesses the feature that the observer information exchange among neighboring agents via communication channel is not required, and only relative output measured by local sensors is used. In this manner, the information transmission via network is removed, which has the advantage of saving communication cost and makes the protocol free from network attacks.
Define the consensus error as , and the consensus is realized if and only if converges to zero. Lv et al. (2020a) designed the attack-free protocols by introducing the distributed full-order and reduced-order appointed-time unknown input observers to estimate the consensus error, where the relative control input is viewed as the unknown input. The following assumption is made in Lv et al. (2020a).
Assumption 3.
The triple satisfies:
-
;
-
.
Based on the minimal-order appointed-time unknown input observer (24), the following distributed adaptive attack-free protocol is proposed:
| (27) | ||||
where , are stable matrices which have no common eigenvalues with and satisfy , , , are gain matrices such that are controllable, with being the unique solution to the Sylvester equation
| (28) |
, , is the adaptive gain with initial value , and is a positive definite matrix whose inverse is the solution to the LMI:
| (29) |
It is clear that . And we have the following result in light of the consensus realization under the fully distributed adaptive state-feedback protocol [Lv et al. (2022)].
Corollary 4.
Remark 8.
Compared with the protocols presented in Lv et al. (2020a), the distributed adaptive attack-free protocol (27) has a lower order and saves the computation cost, as it adopts the minimal-order observer to estimate the exact value of consensus error at the appointed time. It should be clarified that, to realize appointed-time estimation of the consensus error with a relatively small , the overshooting of during the time period is surely to be extremely large, which in turn results in the over-threshold of the control input due to the limited control ability. To overcome the above limitation existing in Lv et al. (2020a), zero input is introduced during the time period and the protocol (27) is a piecewise controller. Meanwhile, the consensus error would not be far from the initial value since can be chosen arbitrarily small, which helps avoid input saturation.
Remark 9.
It should be noticed that in the construction of protocol (27), the design of the minimal-order appointed-time observer and the control input is decoupled. Consequently, the minimal-order appointed-time observer (23) can be easily implemented into the consensus and formation problems for multi-agent systems with uncertainties and nonlinearities, or the attack detection and identification of cyber-physical systems.
Example 1.
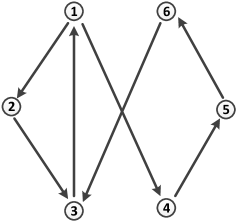
For a multi-agent system consisting of six agents whose dynamics are described by (25) with
the communication graph is depicted in Fig. 1, which clearly contains a directed spanning tree.
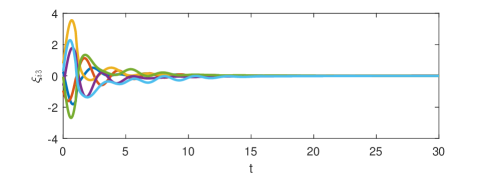
We then have and . The eigenvalues of are , and we can choose with and . Let . Choose . Solving the Sylvester equation (28) gives and . We can calculate , , , and . Solving the LMI (29) gives a solution . Then, . The initial states of the agents and observers are randomly chosen, and .
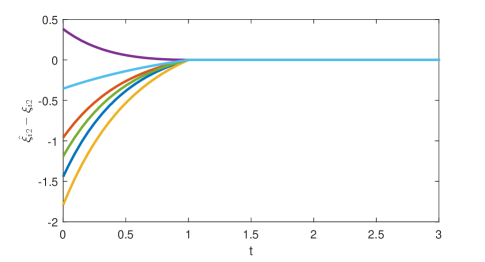
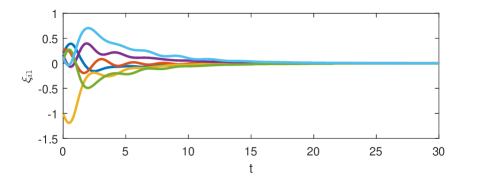
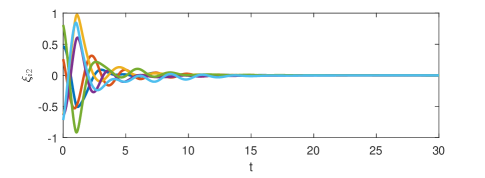
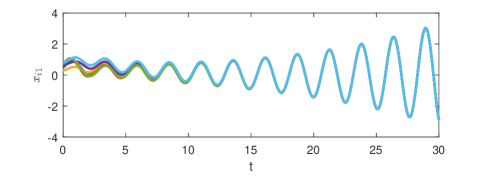
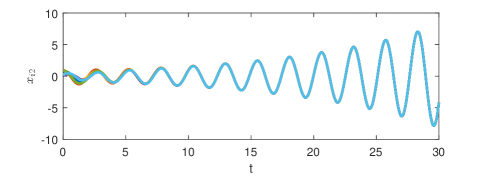
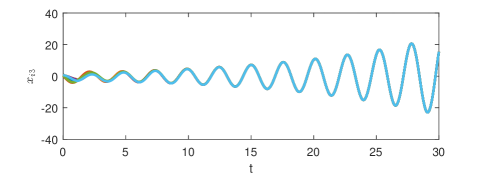
Fig. 2 shows that the minimal-order appointed-time unknown input observer can exactly estimate the consensus error at appointed time . The consensus error is depicted in Fig. 3 and the state is presented in Fig. 4. It is clear that the consensus is indeed realized though the state of each agent diverges.
5 Conclusion
In this paper, we have presented a unified framework of the minimal-order appointed-time observer design based on the pairwise observer structure for linear systems. It has been revealed that the structure of the proposed observer is coincident with that of the full-order appointed-time observer in Engel et al. (2002). The general model of linear system with the unknown input was also considered, and the minimal-order appointed-time unknown input observer was then proposed, which has lower order than the appointed-time observers in existing literature. The minimal-order appointed-time observer design methodology can be easily extended into the functional observer design for linear systems or nonlinear systems, and can be further applied to the attack detection for cyber-physical systems.
References
- (1)
- Kalman (1960) Kalman, R. E. (1960). A New Approach to Linear Filtering and Prediction Problems, IEEE Journal of Basic Engineering 82(1): 35–45.
- Luenberger (1964) Luenberger, D. G. (1964). Observing the state of a linear system, IEEE Transactions on Military Electronics 8(2): 74–80.
- Hou et al. (2002) Hou, M., Zitek, P., and Patton, R. J. (2002). An observer design for linear time-delay systems, IEEE Transactions on Automatic Control 47(1): 121–125.
- Deza et al. (1993) Deza, F., Bossanne, D., Busvelle, F., Gauthier, J. P., and Rakotopara, D. (1993). Exponential observers for nonlinear systems, IEEE Transactions on Automatic Control 38(3): 482–484.
- Ding (2012) Ding, Z. (2012). Observer design in convergent series for a class of nonlinear systems, IEEE Transactions on Automatic Control 57(7): 1849–1854.
- Gao et al. (2016) Gao, Z., Liu, X., and Chen, M. Z. Q. (2016). Unknown input observer-based robust fault estimation for systems corrupted by partially decoupled disturbances, IEEE Transactions on Industrial Electronics 63(4): 2537–2547.
- Cristofaro et al. (2014) Cristofaro, A. and Johansen, T. A. (2014). Fault tolerant control allocation using unknown input observers, Automatica 50(7): 1891–1897.
- Amin et al. (2013) Amin, S., Litrico, X., Sastry, S. S., and Bayen, A. M. (2013). Cyber security of water scada systems part ii: Attack detection using enhanced hydrodynamic models, IEEE Transactions on Control Systems Technology 21(5): 1679–1693.
- Ameli et al. (2018) Ameli, A., Hooshyar, A., El-Saadany, E. F., and Youssef, A. M. (2018). Attack detection and identification for automatic generation control systems, IEEE Transactions on Power Systems 33(5): 4760–4774.
- Wang et al. (1975) Wang, S., Wang, E., and Dorato, P. (1975). Observing the states of systems with unmeasurable disturbances, IEEE Transactions on Automatic Control 20(5): 716–717.
- Kudva et al. (1980) Kudva, P., Viswanadham, N., and Ramakrishna, A. (1980). Observers for linear systems with unknown inputs, IEEE Transactions on Automatic Control 25(1): 113–115.
- Yang et al. (1988) Yang, F. and Wilde, R. W. (1988). Observers for linear systems with unknown inputs, IEEE Transactions on Automatic Control 33(7): 677–681.
- Darouach et al. (1994) Darouach, M., Zasadzinski, M., and Xu, S. J. (1994). Full-order observers for linear systems with unknown inputs, IEEE Transactions on Automatic Control 39(3): 606–609.
- Hou et al. (1992) Hou, M. and Muller, P. C. (1992). Design of observers for linear systems with unknown inputs, IEEE Transactions on Automatic Control 37(6): 871–875.
- Syrmos et al. (1993) Syrmos, V. L. (1993). Computational observer design techniques for linear systems with unknown inputs using the concept of transmission zeros, IEEE Transactions on Automatic Control 38(5): 790–794.
- Syrmos et al. (1983) Kurek, J. (1983). The state vector reconstruction for linear systems with unknown inputs, IEEE Transactions on Automatic Control 28(12): 1120–1122.
- Hou et al. (1994) Hou, M. and Muller, P. C. (1992). Disturbance decoupled observer design: a unified viewpoint, IEEE Transactions on Automatic Control 39(6): 1338–1341.
- Syrmos et al. (1999) Valcher, M. E. (1999). State observers for discrete-time linear systems with unknown inputs, IEEE Transactions on Automatic Control 44(2): 397–401.
- Sundaram et al. (2007) Sundaram, S. and Hadjicostis, C. N. (2007). Delayed observers for linear systems with unknown inputs, IEEE Transactions on Automatic Control 52(2): 334–339.
- Sundaram et al. (2008) Sundaram, S. and Hadjicostis, C. N. (2008). Partial state observers for linear systems with unknown inputs, Automatica 44(12): 3126–3132.
- Darouach et al. (1996) Darouach, M., Zasadzinski, M., and Hayar, M. (1996). Reduced-order observer design for descriptor systems with unknown inputs, IEEE Transactions on Automatic Control 41(7): 1068–1072.
- Koenig et al. (2002) Koenig, D. and Mammar, S. (2002). Design of proportional-integral observer for unknown input descriptor systems, IEEE Transactions on Automatic Control 47(12): 2057–2062.
- Zhang et al. (2020) Zhang, J., Zhao, X., Zhu, F., and Karimi, H. R. (2020). Reduced-order observer design for switched descriptor systems with unknown inputs, IEEE Transactions on Automatic Control 65(1): 287–294.
- Trinh et al. (2008) Trinh, H., Tran, T. D., and Fernando, T. (2008). Disturbance decoupled observers for systems with unknown inputs, IEEE Transactions on Automatic Control 53(10): 2397–2402.
- Sakhraoui et al. (2020) Sakhraoui, I., Trajin, B., and Rotella, F. (2020). Design procedure for linear unknown input functional observers, IEEE Transactions on Automatic Control 65(2): 831–838.
- Bejarano et al. (2011) Bejarano, F. J. and Pisano, A. (2011). Switched observers for switched linear systems with unknown inputs, IEEE Transactions on Automatic Control 56(3): 681–686.
- Gao et al. (2016) Gao, N., Darouach, M., Voos, H., and Alma, M. (2016). New unified dynamic observer design for linear systems with unknown inputs, Automatica 65: 43–52.
- Zhao et al. (2019) Zhao, Y., Liu, Y., Wen, G., Ren, W., and Chen, G. (2019). Designing distributed specified-time consensus protocols for linear multiagent systems over directed graphs, IEEE Transactions on Automatic Control 64(7): 2945–2952.
- Engel et al. (2002) Engel, R. and Kreisselmeier, G. (2002). A continuous-time observer which converges in finite time, IEEE Transactions on Automatic Control 47(7): 1202–1204.
- Pin et al. (2020) Pin, G., Yang, G., Serrani, A., andParisini, T. (2020). Fixed-time observer design for LTI systems by time-varying coordinate transformation, 59th IEEE Conference on Decision and Control (CDC) Jeju, Korea (South), 6040–6045.
- Kreisselmeier et al. (2003) Kreisselmeier, G. and Engel, R. (2003). Nonlinear observers for autonomous lipschitz continuous systems, IEEE Transactions on Automatic Control 48(3): 451–464.
- Menold et al. (2003) Menold, P. H., Findeisen, R., and Allgöwer, F. (2003). Finite time convergent observers for nonlinear systems, 42nd IEEE International Conference on Decision and Control (IEEE Cat. No.03CH37475) Maui, HI, 5673–5678.
- Raff et al. (2005) Raff, T., Menold, P., Ebenbauer, C., and Allgöwer, F. (2005). A finite time functional observer for linear systems, Proceedings of the 44th IEEE Conference on Decision and Control Seville, Spain, 7198–7203.
- Li et al. (2015) Li, Y. and Sanfelice, R. G. (2015). A finite-time convergent observer with robustness to piecewise-constant measurement noise, Automatica 57: 222–230.
- Ao et al. (2018) Ao, W., Song, Y., Wen, C., and Lai, J. (2018). Finite time attack detection and supervised secure state estimation for cpss with malicious adversaries, Information Sciences 451-452: 67–82.
- Raff et al. (2006) Raff, T., Lachner, F., and Allgöwer, F. (2006). A finite time unknown input observer for linear systems, 14th Mediterranean Conference on Control and Automation Ancona, 1–5.
- Lv et al. (2020a) Lv, Y., Wen, G., and Huang, T. (2020). Adaptive protocol design for distributed tracking with relative output information: A distributed fixed-time observer approach, IEEE Transactions on Control of Network Systems 7(1): 118–128.
- Lv et al. (2020b) Lv, Y., Wen, G., Huang, T., and Duan, Z. (2020). Adaptive attack-free protocol for consensus tracking with pure relative output information, Automatica 117: 108998.
- Lv et al. (2022) Lv, Y. and Li, Z. (2022). Is fully distributed adaptive protocol applicable to graphs containing a directed spanning tree? Science China Information Sciences 65: 189203.