Department of Computer Science, University of Illinois at Urbana-Champaign, USAtmc@illinois.eduhttps://orcid.org/0000-0002-8093-0675 Supported in part by NSF Grant CCF-1814026. Department of Computer Science, University of Illinois at Urbana-Champaign, USAqizheng6@illinois.edu \CopyrightTimothy M. Chan and Qizheng He \ccsdesc[100]Theory of computation Computational geometry \hideLIPIcs\EventEditorsKevin Buchin and Éric Colin de Verdière \EventNoEds2 \EventLongTitle37th International Symposium on Computational Geometry (SoCG 2021) \EventShortTitleSoCG 2021 \EventAcronymSoCG \EventYear2021 \EventDateJune 7–11, 2021 \EventLocationBuffalo, NY, USA \EventLogosocg-logo.pdf \SeriesVolume189 \ArticleNo53
More Dynamic Data Structures for Geometric Set Cover with Sublinear Update Time
Abstract
We study geometric set cover problems in dynamic settings, allowing insertions and deletions of points and objects. We present the first dynamic data structure that can maintain an -approximation in sublinear update time for set cover for axis-aligned squares in 2D. More precisely, we obtain randomized update time for an arbitrarily small constant . Previously, a dynamic geometric set cover data structure with sublinear update time was known only for unit squares by Agarwal, Chang, Suri, Xiao, and Xue [SoCG 2020]. If only an approximate size of the solution is needed, then we can also obtain sublinear amortized update time for disks in 2D and halfspaces in 3D. As a byproduct, our techniques for dynamic set cover also yield an optimal randomized -time algorithm for static set cover for 2D disks and 3D halfspaces, improving our earlier result [SoCG 2020].
keywords:
Geometric set cover, approximation algorithms, dynamic data structures, sublinear algorithms, random sampling1 Introduction
Approximation algorithms for NP-hard problems and dynamic data structures are two of the major themes studied by the algorithms community. Recently, problems at the intersection of these two threads have gained much attention, and researchers in computational geometry have also started to systematically explore such problems. For example, at SoCG last year, two papers appeared, one on dynamic geometric set cover by Agarwal et al. [3], and another on dynamic geometric independent set by Henzinger, Neumann, and Wiese [23]. In this paper, we continue the study by Agarwal et al. [3] and investigate dynamic data structures for approximating the minimum set cover in natural geometric instances.
Static geometric set cover.
In the static (unweighted) geometric set cover problem, we are given a set of points and a set of geometric objects, and we want to find the smallest subset of objects in that covers all points of . The problem is fundamental and has many applications. Let OPT denote the value (i.e., cardinality) of the optimal solution. As the problem is NP-hard for many classes of geometric objects, we are interested in efficient approximation algorithms.
Many classes of objects, such as squares and disks in 2D, objects with linear union complexity, and halfspaces in 3D, admit polynomial-time -approximation algorithms (i.e., computing a solution of size ), by using -nets and LP rounding or the multiplicative weight update (MWU) method [8, 17, 19]. Some classes of objects, such as disks in 2D and halfspaces in 3D, even have PTASs [30] or quasi-PTASs [29], though with large polynomial running time.
Agarwal and Pan [5] worked towards finding faster approximation algorithms that run in near linear time. They gave randomized -time algorithms (based on MWU) for computing -approximations, for example, for disks in 2D and halfspaces in 3D. At last year’s SoCG [14], we described further improvements to the running time for 2D disks and 3D halfspaces, including a deterministic -time algorithm and a randomized -time algorithm.
Dynamic geometric set cover.
It is natural to consider the dynamic setting of the geometric set cover problem. Here, we want to support insertions and deletions of points in as well as insertions and deletions of objects in , while maintaining an approximate solution. Note that the solution may have linear size in the worst case. In the simplest version of the problem, we may just want to output the value of the solution. More strongly, we may want some representation of the solution itself, so that afterwards, the objects in the solution can be reported in constant time per element when needed.
Agarwal et al. [3] gave a number of results on dynamic geometric set cover. They showed that for intervals in 1D, a -approximation can be maintained in time per insertions and deletions of points and intervals. (Throughout the paper, denotes an arbitrarily small constant.) In 2D, they had only one main result: a fully dynamic -approximation algorithm for unit axis-aligned squares, with update time.
New results.
We present several new results on dynamic geometric set cover. The first is a fully dynamic, randomized, -approximation algorithm for the more general case of arbitrary axis-aligned squares in 2D, with amortized update time. Though our time bound is a little worse than Agarwal et al.’s for the unit square case, the arbitrary square case is more challenging. (The unit square case reduces to case of dominance ranges, i.e., quadrants, via a standard grid approach; since the union of such ranges forms a “staircase” sequence of vertices, the problem is in some sense “-dimensional”. In contrast, the arbitrary square problem requires truly “2-dimensional” ideas.)
We then consider the case of halfspaces in 3D. This case is fundamental, as set cover for 2D disks reduces to set cover for 3D halfspaces by the standard lifting transformation [21]. Also, by duality, hitting set for 3D halfspaces is equivalent to set cover for 3D halfspaces, and hitting set for 2D disks reduces to set cover for 3D halfspaces as well.
For 3D halfspaces, we obtain a fully dynamic, randomized algorithm with amortized update time. Our result here is slightly weaker: it only finds the value of an -approximate solution (which could be good enough in some applications). If a solution itself is required, we can still get sublinear update time as long as OPT is sublinear (below ). This assumption seems reasonable, since sublinear reporting time is not possible otherwise. (However, we currently do not know how to obtain a stronger time bound of the form with to report a solution for 3D halfspaces.)
Remarks.
Our results are randomized in the Monte Carlo sense: the computed solution may not always be correct, but it is correct with high probability (w.h.p.), i.e., probability at least for an arbitrarily large constant . The error probability bounds hold even when the user has knowledge of the random choices made by the algorithms. (We do not assume an “oblivious adversary”; in fact, the algorithms make a new set of random choices each time it computes a solution, and the data structures themselves are not randomized.)
The update times are better than stated in many cases, notably, when OPT is small or when OPT is large. More precise OPT-sensitive bounds are given in lemmas and theorems throughout the paper. (The and bounds are obtained by “balancing”.)
We have assumed that we are required to compute a solution after every update. In some (but not all) cases, the update cost is smaller than the cost of computing a solution (this may be useful if we are executing a batch of updates).
Techniques.
Our algorithms are obtained by handling two cases differently: when OPT is small and when OPT is large. Intuitively, the small OPT case is easier since we are generating fewer objects, but the large OPT case also seems potentially easier since we can tolerate a larger additive error when targeting an -factor approximation—so, we are in a “win-win” situation. For our algorithms for 3D halfspaces, we even find it necessary to handle an intermediate case when OPT is medium (aiming for sublinear time for sublinear OPT).
Our algorithms for the small OPT case are based on the previous static MWU algorithms [8, 5, 14]. The adaptation of these static algorithms is not straightforward, and requires using various known techniques in new ways (-levels in arrangements, for our 2D square algorithm in Section 3.1, and “augmented” partition trees, for our 3D halfspace algorithm in Section 4.1). The medium case for 3D halfspaces (in Section 4.2) is technically even more challenging (where we use “shallow” partition trees and other ideas).
Our algorithm for squares in the large OPT case (in Section 3.2) is different (not based on MWU), and interestingly uses quadtrees in a non-obvious way. For 3D halfspaces, our algorithm in the large OPT case (in Section 4.3) can compute only the value of an approximate solution, and is based on random sampling. However, the obvious way to use a random sample (just solving the problem on a random subset of points and objects) does not work. We use sampling in a nontrivial way, combining geometric cuttings with planar graph separators.
In some of our algorithms, notably the small OPT algorithms for squares and 3D halfspaces (in Sections 3.1 and 4.1) and the large OPT algorithm for 3D halfspaces (in Section 4.3), the data structure part is “minimal”: we just assume that points and objects are stored separately in standard range searching data structures. We describe sublinear-time algorithms to compute a solution from scratch, using range searching as oracles. Dynamization becomes trivial, since range searching data structures typically are already known to support insertions and deletions. (It also potentially enables other operations like merging sets, or solving the set cover problem for range-restricted subsets of points and subsets of objects.)
The topic of sublinear-time algorithms has received considerable attention in the algorithms community, due to applications to big data (where we want to solve problems without examining the entire input). A similar model of sublinear-time algorithms where the input is augmented with range searching data structures was proposed by Czumaj et al. [20], who presented results on approximating the weight of the Euclidean minimum spanning tree in any constant dimension under this model.
Application to static geometric set cover.
Although we did not intend to revisit the static problem, our techniques can lead a randomized -approximation algorithm for set cover for 3D halfspaces running in time, which completely eliminates the extra factors in our previous result from SoCG’20 [14] and is optimal (in comparison-based models)! This bonus result is interesting in its own right, and is described in Section 5.
2 Review of an MWU Algorithm
We begin by briefly reviewing a known static approximation algorithm for geometric set cover, based on the multiplicative weight updates (MWU) method. Some of our dynamic algorithms will be built upon this algorithm.
Specifically, we consider the following randomized algorithm from our previous SoCG’20 paper [14], which is a variant of a standard algorithm by Brönnimann and Goodrich [8] or Clarkson [17] (see also Agarwal and Pan [5]). Below, is a sufficiently large constant. The depth of a point in a set of objects is the number of objects of containing . A subset of objects is called an -net of if all points with depth in are covered by . The size of a multiset refers to the sum of the multiplicities of its elements .
In the standard version of MWU, the “lightness” condition in line 5 was whether the depth of in is at most . The main difference in the above randomized version is that lightness is tested with respect to the sample , which is computationally easier to work with— has size with high probability (w.h.p.). Justification of this randomized variant follows from a Chernoff bound, and was shown in [14, Section 4.2].
It is known that the algorithm terminates in rounds and multiplicity-doubling steps [8, 5, 14]. Furthermore, increases by at most a factor of 2 in each round; in particular, is bounded by at the end of rounds.
In the standard version of MWU, line 11 returns a -net of the multiset , but a -net of works just as well: in the end, the depth in of all points of is at least w.h.p., and so will be covered by the net. For objects that are axis-aligned squares in 2D, disks in 2D, or halfspaces in 3D, -nets of size exist, and thus the above algorithm yields a set cover of size , i.e., a constant-factor approximation. By known algorithms (e.g., [15]), the net for in line 11 can be constructed in time.
Several modifications have been explored in previous work. For example, in the first algorithm of Agarwal and Pan [5], each round examines all points of in a fixed order and test for lightness of the points one by one (based on the observation that a point found to have large depth will still have large depth by the end of the round). In our previous paper [14], we have also added a step at the beginning of each round, where the multiplicities are rescaled and rounded, so as to keep bounded by . These modifications led to a number of different static implementations running in time.
3 Axis-Aligned Squares
Our first result for dynamic set cover is for axis-aligned squares. Previously, a sublinear time algorithm for dynamic set cover was known only for unit squares. Our method will be divided into two cases: when OPT is small and when OPT is large. Let be a guess on OPT. We will run our algorithm for each possible in parallel. (When the guess is wrong, our algorithm will be able to tell whether is approximately smaller or larger than OPT w.h.p.) The update time will increase only by a factor of .
3.1 Algorithm for Small OPT
Our algorithm for the small OPT case will be based on the randomized MWU algorithm described in Section 2. The key is to realize that this algorithm can actually be implemented to run in sublinear time, assuming that the points and the objects have been preprocessed in standard range searching data structures. Since these structures are dynamizable, we can just re-run the MWU algorithm from scratch after every update.
3.1.1 Data structures
Our data structures are simple. We store the point set in the standard 2D range tree [21]. For each square with center and side length , map to a point in 4D. We also store the lifted point set in a 4D range tree. Range trees support insertions and deletions in and in polylogarithmic time.
3.1.2 Computing a solution
We now show how to compute an -approximate solution in sublinear time when OPT is small by running Algorithm 1 using the above data structures. At first glance, linear time seems unavoidable: (i) the obvious way to find low-depth points in line 5 is to scan through all points of in each round (as was done in previous algorithms [5, 14]), and (ii) explicitly maintaining the multiplicities of all points would also require linear time.
To overcome these obstacles, we observe that (i) we can use data structures to find the next low-depth point without testing each point one by one (recall that there are only multiplicity-doubling steps), and (ii) multiplicities do not need to be maintained explicitly, so long as in line 8 we can generate a multiplicity-weighted random sample among the objects containing a given point efficiently (recall that the sample has only size). The subproblem in (ii) is a weighted range sampling problem.
Finding a low-depth point.
Let . Each time we want to find a low-depth point in line 5, we compute (from scratch) , the -level of , i.e., the collection of all cells in the arrangement of the squares of depth at most . It is known [31] that has cells and can be constructed in time, which is (since and ). To find a point of that has depth in at most , we simply examine each cell of , and perform an orthogonal range query to test if the cell contains a point of . All this takes time.
As there are multiplicity-doubling steps, the total cost is .
Weighted range sampling.
For each square with center and side length , define its dual point to be in 3D. For each point , define its dual region to be in 3D. Then a point is in the square iff the point is in the region .
Let be the set of all points for which we have performed multiplicity-doubling steps thus far. Note that . Let for a sufficiently large constant . Each time we perform a multiplicity-doubling step, we compute (from scratch) , the -level of the dual regions . This structure corresponds to planar order- Voronoi diagrams. By known results [31, 9, 25], has cells and can be constructed in time, which is (since and ). The multiplicity of a square is equal to (since each in containing doubles the multiplicity of ). In particular, since multiplicities are bounded by , the depth (i.e., level) of must be logarithmically bounded. So, each is covered by , and the multiplicity of is determined by which cell of the point is in.
To generate a multiplicity-weighted sample of the squares containing for line 8, after has been inserted to , we examine all cells of contained in . For each such cell , we identify the squares for which ; this reduces to an orthogonal range query in , and the answer can be expressed as a disjoint union of canonical subsets. Knowing the sizes and multiplicities of these canonical subsets for all such cells, we can then generate the weighted sample in time plus the size of the sample.
Hence, the total cost of all multiplicity-doubling steps is .
In addition, we need to generate a new weighted sample (with a new sampling probability ) in line 4 at the beginning of each round; this can be done similar to above, in time plus the size of the sample , for each of the rounds. As mentioned, the final net computation in line 11 takes time. We have thus obtained:
Lemma 3.1.
There exists a data structure for the dynamic set cover problem for axis-aligned squares and points in 2D that supports insertions and deletions in time and can find an -approximate solution w.h.p. to the set cover problem in time.
3.2 Algorithm for Large OPT
To complement our solution for the small OPT case, we now show that the problem also gets easier when OPT is large, mainly because we can afford a large additive error. We describe a different, self-contained algorithm for this case (not based on modifying MWU), interestingly by using quadtrees in a novel way.
To allow for both multiplicative and additive error, we use the term -approximation to refer to a solution with cost at most .
For simplicity, we assume that all coordinates are integers bounded by . At the end, we will comment on how to remove this assumption.
In the standard quadtree, we start with a bounding square cell and recursively divide a square cell into four square subcells. We define the size of a cell to be the number of vertices in among the squares of , plus the number of points of in . We stop subdividing when a leaf cell has size at most , where is a parameter to be set later. This yields a subdivision into cells per level, and cells in total. The quadtree decomposition can be easily made dynamic under insertions and deletions of points and squares.
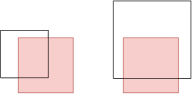
For each leaf cell , a square in intersecting is called short if at least one of its vertices is in the cell, and long otherwise, as shown in Fig. 1. Note that a long square can have at most one side crossing the cell, because the quadtree cell is also a square. The union of the long squares within the cell is defined by at most 4 long squares—call these the maximal long squares. (If there is a square containing , we can designate one such square as the maximal long square.) For each leaf cell , it suffices to approximate the optimal set cover for the input points in using only the short squares plus the at most 4 maximal long squares in . By charging each square in the optimal solution to the cells containing its 4 vertices, we see that the sum of the sizes of the optimal covers in the leaf cells is at most , which is indeed an -approximation if we choose .
Note that the complement of the union of the at most 4 maximal long squares in a cell is a rectangle . We will store the short squares in the cell in a data structure to answer the following type of query:
Given any query rectangle , compute an -approximation to the optimal set cover for the points in using only the short squares.
Assuming the availability of such data structures , we can solve the dynamic set cover problem as follows:
-
•
An insertion/deletion of a square in requires updating 4 of these data structures for the leaf cells containing the vertices of , and also updating the maximal long squares for all leaf cells in time.
-
•
An insertion/deletion of a point in requires updating one data structure for the leaf cell containing .
-
•
Whenever we want to compute a set cover solution, we examine all cells and query the data structure for , and return the union of the answers.
First implementation of .
A simple way to implement the data structure is as follows: in an update, we just recompute an approximate solution from scratch for every possible query rectangle in . Since there are only combinatorially different query rectangles, and static approximate set cover on squares and points takes time [5, 14], the update time is , and the query time is trivially .
As a result, the cost of insertion/deletion in the overall method is .
Improved implementation for .
We further improve the update time for the data structure . Instead of recomputing solutions for all rectangles, the idea is to recompute solutions for a smaller number of “canonical rectangles”. More precisely, by using a 2D range tree [4, 21] for the points in , with branching factor in each dimension, we can form a set of canonical rectangles with total size , such that every query rectangle can be decomposed into canonical rectangles, ignoring portions that are empty of points. We set for an arbitrarily small constant .
For each canonical rectangle with size , there are at most maximal long squares with respect to : the union of the long squares that cut across horizontally have at most two edges between any two consecutive points/vertices; and a similar statement holds for the long squares that cut across vertically. These maximal long squares can be found in time by standard orthogonal range searching. We can thus approximate the optimal set cover for the points in the canonical rectangle , using the short squares and maximal long squares with respect to , in time by known static set cover algorithms [5, 14]. The total time over all canonical rectangles is .
Given a query rectangle, we can decompose it into canonical rectangles and return the union of the optimal solutions in the canonical rectangles, which is an -approximation (more precisely, an -approximation).
As a result, the cost of insertion/deletion in the overall method is .
Removing the dependency on .
When may be large, we can reduce the tree depth from to by replacing the quadtree with the BBD tree of Arya et al. [7]. Each cell in the BBD tree is the set difference of two quadtree squares, one contained in the other. The size of each child cell is at most a fraction of the size of the parent cell. As before, we stop subdividing when a leaf cell has size at most . Since any such leaf cell has size now, the number of leaf cells is . The BBD tree can be maintained dynamically in polylogarithmic time (for example, by periodically rebuilding when subtrees become unbalanced). Since a leaf cell is the difference of two quadtree squares, it is not difficult to see that the number of maximal long squares in remains . So, our previous analysis remains valid.
Lemma 3.2.
Given a parameter , there exists a data structure for the dynamic set cover problem for axis-aligned squares and points in 2D that maintains an -approximate solution with insertion and deletion time.
Combining the algorithms.
When , we use the algorithm for small OPT; the running time is . When , we use the algorithm for large OPT with , so that an -approximation is indeed an -approximation; the running time is .
Theorem 3.3.
There exists a data structure for the dynamic set cover problem for axis-aligned squares and points in 2D that maintains an -approximate solution w.h.p. with insertion and deletion time for any constant .
The case of fat rectangles can be reduced to squares, since such rectangles can be replaced by squares (increasing the approximation factor by only ). Our approach can be modified to work more generally for homothets of a fixed fat convex polygon with a constant number of vertices.
4 Halfspaces in 3D
In this section, we study dynamic geometric set cover for the more challenging case of 3D halfspaces. Using the standard lifting transformation [21], we can transform 2D disks to 3D upper halfspaces. For simplicity, we assume that all halfspaces are upper halfspaces; Section 4.4 discusses how to modify our algorithms when there are both upper and lower halfspaces. Our method will be divided into three cases: small, medium, and large OPT.
4.1 Algorithm for Small OPT
Similar to the small OPT algorithm for axis-aligned squares in Section 3.1, we describe a small OPT algorithm for halfspaces based on the randomized MWU algorithm in Section 2. Although our earlier approach using levels in arrangements could be generalized, we describe a better approach based on augmenting partition trees with counters.
4.1.1 Data structures
We store the 3D point set in Matoušek’s partition tree [26]: The tree has height and degree for a sufficiently large constant . Each node stores a simplicial cell and a “canonical subset” , where at the root , and is contained in , is the disjoint union of over all children or , and has constant size at each leaf . Furthermore, any halfspace crosses cells of the tree for any arbitrarily small constant (depending on ). Here a halfspace crosses a cell iff the boundary of intersects .
For each upper halfspace , let denote its dual point; for each point , let denote its dual upper halfspace. (Duality [21] is defined so that is in iff is in .)
We also store the 3D dual point set in Matoušek’s partition tree. Each node stores a cell and a canonical subset like above.
4.1.2 Computing a solution
We now show how to compute an -approximate solution in sublinear time when OPT is small by running Algorithm 1 using the above data structures. As in Section 3.1, the main subproblems are (i) finding a low-depth point with respect to , and (ii) weighted range sampling, where the weights are the multiplicities (which are not explicitly stored).
Finding a low-depth point.
We maintain two values at each node of the partition tree of :
-
•
is the number of halfspaces of containing but not containing .
-
•
is the minimum depth among all points in with respect to the halfspaces of crossing .
The overall minimum depth with respect to is given by the value at the root . Whenever we insert a halfspace to , for each of the cells crossed by , we update the counters for the children of the nodes ; we also update the value bottom-up according to the formula . Thus, all values can be maintained in time per insertion to .
As there are insertions to , the total cost is . This cost covers the resetting of counters at every round.
(We remark that the idea of augmenting nodes of partition trees with counters appeared before in at least one prior work on dynamic geometric data structures [10, Theorem 4.1].)
Weighted range sampling.
Let be the set of all points for which we have performed multiplicity-doubling steps thus far. Note that . The multiplicity of a halfspace is . To implicitly represent the multiplicities and their sum, we maintain two values at each node of the partition tree for :
-
•
is the number of dual halfspaces of containing but not containing .
-
•
is the sum of over all .
Whenever we insert a point to , for each of the cells crossed by the dual halfspace , we update the counters for the children of the nodes ; we also update the value bottom-up according to the formula . Thus, all values can be maintained in time per insertion to .
To generate a weighted sample of the halfspaces of containing for line 8, we find all cells crossed by the dual halfspace , and consider the canonical subsets for the children of with contained in . We can then sample from these canonical subsets, weighted by , where the sum is over all ancestors of . All this takes time plus the size of the sample.
Hence, the total cost of all multiplicity-doubling steps is .
Lemma 4.1.
There exists a data structure for the dynamic set cover problem for upper halfspaces and points in 3D that supports insertions and deletions in time and can find an -approximate solution w.h.p. in time.
4.2 Algorithm for Medium OPT
The preceding algorithm works well only when OPT is smaller than about . We show that a more involved algorithm, also based on MWU, can achieve sublinear time even when OPT approaches . The basic approach is to use shallow versions of the partition trees [27].
4.2.1 Data structures
We begin with a lemma that was used before in some of the previous static algorithms by Agarwal and Pan [5] and ours [14]. With this lemma, we can effectively make every input halfspace shallow, i.e., contain at most points. The extra condition in the second sentence of the lemma below is new, and is needed in order to make dynamization possible later (difficulty arises when halfspaces in get deleted). Because of this extra condition, we describe a construction which is different from the previous algorithms [5, 14].
Lemma 4.2.
Given a set of points, a set of halfspaces in 3D and a parameter , we can construct a subset of halfspaces of size , and a subset of points , such that (i) each point in is covered by , and (ii) each halfspace of contains points of .
Furthermore, we can decompose , where has size for each , such that each point in is covered by . The construction takes time.
Proof 4.3.
We use a simple “greedy” approach: We examine each halfspace in an arbitrary order, and test whether contains more than points of . If so, we add to , pick some (but not more) points in to add to , and delete from . Clearly, the number of halfspaces added to is .
To bound the construction time, we maintain in Chan’s dynamic 3D halfspace range reporting structure with polylogarithmic amortized update time [11]. The cost of all deletions is . Testing each halfspace requires a halfspace range counting query, but for the above purposes, it suffices to use an approximate count, with approximation factor. Given a query halfspace containing points, in time, one can find lists of size from Chan’s data structure [11] (see also [13, Section 3]), so that the points inside are contained in the union of these lists. The sum of the sizes of these lists is and , yielding an -approximation of the count.
We divide the update sequence into phases of updates each, for a parameter . Our data structure will be rebuilt periodically, after each phase. Let and be and at the beginning of the current phase. Let and be the current set of points and the set of halfspaces that have been inserted to and in the current phase. Let and be the current set of points and the set of halfspaces deleted from and in the current phase. At the start of each phase, we apply Lemma 4.2.
We store the 3D point set in a partition tree, like before. However, we will need a bound on the crossing number that is sensitive to shallowness: namely,
-
•
any halfspace containing points of crosses at most cells of the tree;
-
•
any other halfspace crosses at most cells.
This follows by combining Matoušek’s shallow version of the partition tree [27] with the original version of the partition tree: Using the shallow version of the partition tree, with leaf cells containing points each, any halfspace that contains points is known to cross at most leaf cells [27]. For each leaf cell with points, we build the original partition tree [26], which has crossing number bound .
In addition, we maintain the following counter at each node of the partition tree:
-
•
is the number of halfspaces of containing but not containing .
In the beginning of a phase, we can compute each count by 3D simplex range counting query on the dual points of (since halfspaces containing a simplex and not containing another simplex dualize to points in a polyhedral region of constant size); by known results [4, 26], such queries on points in 3D take time. The amortized cost is .
Afterwards, during each insertion/deletion of a halfspace in , we increment/decrement the counters at nodes of the tree (note that the halfspace may not be shallow). Thus, each update in costs time.
We also store the 3D dual point set in a partition tree, again with crossing number bound with respect to halfspaces containing points. Such a partition tree supports deletions in polylogarithmic time.
4.2.2 Computing a solution
We now show how to compute an -approximate solution in sublinear time when OPT is sublinear using the above data structures. We first take a new unweighted random sample of size . We include in the solution. Since this set has size , this increases the approximation factor only by . Let , which has points. It remains to cover the points in , excluding those already covered by , using halfspaces in . We will do so by running Algorithm 1 on these points and halfspaces using the above data structures. As before, the main subproblems are (i) finding a low-depth point, and (ii) weighted range sampling.
Finding a low-depth point.
We can find the minimum depth of the points of (with respect to ) as in the small OPT algorithm, by using counters in the partition tree for .
Since any halfspace in contains at most points of by Lemma 4.2, the cost per insertion to is reduced from to . The total cost over all insertions to is
One technicality is that we should be excluding points already covered by . To fix this, we add copies of to at the beginning of each round. This way, points covered by would not be picked as low-depth points. Adding these copies of requires no extra effort, since we can initialize with the already computed value, times , for all nodes encountered. The copies of the halfspaces of can be inserted one by one, in time each, as above. The extra cost for these insertions to is bounded as above.
Another technicality that we should be excluding the deleted points in when defining the minimum depth values . When we delete a point from , we can update the values along a path bottom-up in time.
We can find low-depth points of (with respect to ) more naively, by examining the points of , excluding those covered by , and testing them one by one in each round (like in Agarwal and Pan’s algorithm [5]). In line 5, it suffices to use an -approximation to the depth (after adjusting constants in the pseudocode), and as noted in our previous paper [14], we can apply known data structures for 3D halfspace approximate range counting [2] for the dual points ; queries and insertions to take polylogarithmic time. A point that has been found to have depth larger than the threshold will remain having large depth during a round. The total cost over all rounds is .
Weighted range sampling.
During a multiplicity-doubling step for a point , we can generate a multiplicity-weighted sample from the halfspaces containing in the same way as in the small OPT algorithm, by using counters in the partition tree for . Observe that has depth in at most w.h.p., because otherwise, would be covered by the random sample and would have been excluded (in other words, a random sample of size is a -net w.h.p.). Since the dual halfspace contains at most points of , the cost per multiplicity-doubling step is reduced from to . The total cost over all multiplicity-doubling steps is
In conclusion, the total time for running MWU is . To balance this computation cost with the update cost, we set and get a bound of .
Lemma 4.4.
There exists a data structure for the dynamic set cover problem for upper halfspaces and points in 3D that maintains an -approximate solution w.h.p. with amortized insertion and deletion time.
4.3 Algorithm for Large OPT
Lastly, we give an algorithm for the large OPT case, which is very different from the algorithms in the previous subsections (and not based on modifying MWU). Here, we can only compute the size of the approximate set cover, not the cover itself. Like before, we will show that the problem gets easier for large OPT, because we can afford a large additive error. The idea is to decompose the problem into subproblems via geometric sampling and planar separators, and then approximate the sum of the subproblems’ answers by sampling again.
4.3.1 Data structures
We just store the dual point set in a known 3D halfspace range reporting structure. The data structure by Chan [11] supports queries in time for output size , and insertions and deletions in in polylogarithmic amortized time.
We store the -projection of the point set in a known 2D triangle range searching structure [26] that supports queries in time for output size , and insertions and deletions in in time for a given trade-off parameter .
4.3.2 Approximating the optimal value
Let and be parameters to be set later. Take a random sample of the halfspaces with size . Imagine that is included in the solution. The remaining uncovered space is the complement of the union of , which is a 3D convex polyhedron. There are cells in the vertical decomposition of this polyhedron (formed by triangulating each face and drawing a vertical wall at each edge of the triangulation). Each cell is crossed by halfspaces w.h.p., by well-known geometric sampling analysis [16]. The decomposition can be constructed in time.
Our key idea is to use planar graph separators to divide into smaller subproblems. The following is a multi-cluster version of the standard planar separator theorem [24] (sometimes known as “-divisions” [22]):
Lemma 4.5 (Planar Separator Theorem, Multi-Cluster Version).
Given a planar graph with vertices, and a parameter , we can partition into subsets of size each, and an extra “boundary set” of size , such that no two vertices from different subsets and are adjacent. The partition can be constructed in time.
(We remark that the general idea of combining cuttings/geometric sampling with planar graph separators appeared in some geometric approximation algorithms before, e.g., [1].)
We apply Lemma 4.5 to the dual graph of (which has size ), yielding “clusters” of cells each, and a set of “boundary cells”, in time.
Let be the subset of all halfspaces of that cross boundary cells of . Note that w.h.p.
For each cluster , let denote the subset of all points of whose -projections lie in the -projection of the cells of , and let denote the subset of all halfspaces of that cross the cells of . Note that w.h.p. Let denote the optimal value for the set cover problem for the halfspaces of and the points of not covered by .
Claim 1.
approximates OPT with additive error w.h.p.
Proof 4.6.
A feasible solution can be formed by taking the union of the solutions corresponding to , together with (to cover points not covered by ) and (to cover points inside boundary cells). As and w.h.p., this proves that .
In the other direction, observe that if a halfspace crosses two different clusters and , it must also cross some boundary cell in by convexity: pick points and ; then the line segment must hit the wall of some boundary cell. So, after removing from the global optimal solution, we get disjoint local solutions in the clusters. This proves that .
We use the following known fact about approximating a sum via random sampling (which is of course a standard trick):
Lemma 4.7.
Suppose where . Take a random subset of elements from , for a sufficiently large constant . Then is a -approximation to w.h.p.
Proof 4.8.
By rescaling the ’s and by a factor , we may assume that . Define a random variable , which is with probability , and 0 otherwise. Then . The result follows from a standard Chernoff bound on the ’s.
By applying the above lemma with , , and (assuming OPT is finite), we can -approximate OPT by summing over a random sample of clusters .
We can generate the set by finding the halfspaces of that contain the vertices of the cells in —this corresponds to halfspace range reporting queries for the dual 3D point set , each with output size w.h.p. and each taking time [11]. Thus, can be found in time. We compute the union of , which is the complement of an intersection of halfspaces, by the dual of 3D convex hull algorithm [21]. This takes time.
For each chosen cluster , we can generate similarly by halfspace range reporting queries for , each with output size w.h.p. Thus, can be found in time. We can generate by performing triangle range reporting queries for the 2D -projection of the point set . Thus, can be found in time. We filter points of covered by , by performing planar point location queries [21] in the -projection of the boundary of the union of . This takes time. We can then compute an -approximation to by running a known static set cover algorithm [5, 14] in time.
The expected sum of over all chosen clusters is . The total expected time over clusters is . The overall expected running time is , and we obtain an -approximation. (The expected bound can be converted to worst-case by placing a time limit and re-running logarithmically many times.) Choosing yields the following result:
Lemma 4.9.
Given parameters and and any constant , there exists a data structure for the dynamic set cover problem for upper halfspaces and points in 3D that supports insertions and deletions in amortized time and can find the value of an -approximation w.h.p. in time for any constant .
A minor technicality is that when applying Lemma 4.7, we have assumed that the optimal value is finite. The problem of checking whether a solution exists, i.e., whether a point set is covered by a set of halfspaces (or more generally, maintaining the lowest-depth point), subject to insertions and deletions of points and halfspaces, has already been solved before by Chan [10, Theorem 4.1], who gave a fully dynamic algorithm with time per operation (based on augmenting partition trees with counters, similar to what we have done here).
Combining the algorithms.
Finally, we combine all three algorithms:
-
1.
When , we use the algorithm for small OPT; the running time is .
-
2.
When , we use the algorithm for medium OPT; the running time is
-
3.
When , we use the algorithm for large OPT with and , so that an -approximation is indeed an -approximation; the running time is .
Theorem 4.10.
There exists a data structure for the dynamic set cover problem for upper halfspaces and points in 3D that maintains the value of an -approximate solution w.h.p. with amortized insertion and deletion time for any constant .
4.4 Upper and Lower Halfspaces
Small and medium OPT.
It is straightforward to modify the small and medium OPT algorithms in Sections 4.1 and 4.2 to handle the case when there are both upper and lower halfspaces in . For weighted range sampling, we can handle the upper halfspaces and the lower halfspaces separately; for example, we build the partition tree for the dual points of separately for the upper and the lower halfspaces. To find low-depth points, we use just one partition tree for the points of , where depth is defined relatively to the combined set of upper and lower halfspaces.
Large OPT.
In the large OPT algorithm, we can no longer use the vertical decomposition. Instead, we pick a point inside the polyhedron and consider a “star” triangulation of the polyhedron where all tetrahedra have as a vertex. Because we can no longer use -projections, naively we would need to replace 2D triangle range searching with 3D simplex range searching, which would increase the update time slightly.
If is fixed, we can replace the orthogonal -projection with a perspective projection with respect to , and we can still use 2D triangle range searching. We describe a way to find a point that stays fixed for a number of updates. (Note that need not be in .)
Specifically, we divide the update sequence into phases with updates each. At the beginning of each phase, we set to be a point of minimum depth with respect to , among all points in ; an -approximation is fine and can be found in randomized time [2, 6].
If has depth at least at the beginning of the phase, the minimum depth is at least during the entire phase, and a -net of size is a set cover and can be generated by random sampling; trivially, this gives an -approximation, assuming .
Otherwise, has depth during the entire phase. In the large OPT algorithm, we let be the set of halfspaces containing (which can be found by halfspace range reporting in the dual), include in the solution, and remove from before taking the random sample . As a result, the complement of the union of indeed contains . The rest of the algorithm is similar, using a perspective projection from instead of -projection. (Points covered by should be excluded, and we can do so by adding to .) The additive error increases by , and so is asymptotically unchanged.
The data structures have preprocessing time . Since we rebuild after every updates, the amortized update cost is . In our application with and , this cost does not dominate.
Theorem 4.11.
Theorem 4.10 holds even when there are both upper and lower halfspaces.
5 Improving Static Set Cover
In this last section, we show how the techniques we have developed for the dynamic geometric set cover problem can lead to a randomized algorithm for static set cover for 3D halfspaces running in time, which is optimal and improves our previous randomized algorithm [14]. The new algorithm combines the medium OPT algorithm in Section 4.2 and the large OPT algorithm in Section 4.3.
Let be a fixed parameter used to control the error probability.
Case 1: .
Here, we modify the medium OPT algorithm in Section 4.2. We first guess a value ; a constant () number of guesses suffices. The preprocessing algorithm will use this parameter .
In the static setting, our old version of Lemma 4.2 for constructing suffices and takes time [14]. Specifically, we construct a set of halfspaces so that after removing the points covered by , every halfspace of contains at most points. Since we are in the static setting, we can explicitly remove the points covered by . The shallow versions of the partition trees [27] can be preprocessed in time. Parts of the algorithm can be simplified: there is no need to divide into phases, and no need for the extra counters and the extra point set during the MWU algorithm. The MWU algorithm then runs in time. As we need to run the MWU algorithm for all guesses that are powers of 2 (up to ), the running time of the MWU algorithm increases by a logarithmic factor but remains , excluding preprocessing.
To bound the error probability by , we can re-run the MWU algorithm times. The total running time including preprocessing is .
Case 2: .
Here, we modify the large OPT algorithm in Section 4.3. In the static setting, there is no need for the halfspace range reporting and triangle range searching structures. We first generate the conflict lists of the cells (the lists of halfspaces crossing the cells) in in expected time [18]. We verify that indeed every conflict list has size ; if not, we restart, with expected number of trials till success. For each point , we locate the cell in which contains in the -projection, by planar point location in time [21].
We refine before applying the planar separator theorem: for each cell in , we subdivide into subcells each containing at most points of in the -projection. The number of extra cuts is , and so the new decomposition still has cells.
(As noted before, when there are both upper and lower halfspaces, we replace the vertical decomposition with a “star” triangulation and replace orthogonal -projection with a perspective projection.)
The original large OPT algorithm takes a random sample of the clusters to approximate the value of the optimal solution. To compute an actual solution, we instead use recursion in every cluster.
Recall that the number of clusters is . For each cluster , the number of halfspaces in is , and the number of points in is also , because of the above refinement of . Recall that after removing halfspaces in , the ’s become disjoint; and after removing points covered by , the sum of the optimal values in the subproblems is upper-bounded by OPT.
We set and so that the additive error is .
Analysis.
The worst-case expected running time of the overall algorithm for input size satisfies the recurrence , for some ’s with and . This recurrence solves to . (Roughly, the reason is that forms a geometric progression as we descend downward in the recursion tree.)
Let be the worst-case additive error of the computed solution for an input of size and optimal value . In Case 1, the additive error is . In general, we have the recurrence , for some ’s and ’s with , and , and . This recurrence solves to . (Roughly, the reason is that forms a geometric progression as we descend downward in the recursion tree.) Thus, the algorithm yields an -approximation.
The total error probability over the entire recursion is bounded by . We set for the global input size and an arbitrarily large constant .
Theorem 5.1.
Given halfspaces and points in 3D, there exists a randomized -approximation algorithm for the set cover problem that runs in expected time and is correct w.h.p.
It is possible to modify the analysis to get worst-case time instead of expected. In Case 2, the conflict lists have size w.h.p. and the construction time is actually w.h.p., at the root of the recursion. In subsequent levels of the recursion, we can apply a Chernoff bound to get a high-probability bound on the total running time.
References
- [1] Anna Adamaszek, Sariel Har-Peled, and Andreas Wiese. Approximation schemes for independent set and sparse subsets of polygons. Journal of the ACM, 66(4):29:1–29:40, 2019. doi:10.1145/3326122.
- [2] Peyman Afshani and Timothy M. Chan. On approximate range counting and depth. Discrete & Computational Geometry, 42(1):3–21, 2009. URL: https://doi.org/10.1007/s00454-009-9177-z, doi:10.1007/s00454-009-9177-z.
- [3] Pankaj K. Agarwal, Hsien-Chih Chang, Subhash Suri, Allen Xiao, and Jie Xue. Dynamic geometric set cover and hitting set. In Proceedings of the 36th Symposium on Computational Geometry (SoCG), volume 164, pages 2:1–2:15, 2020. URL: https://doi.org/10.4230/LIPIcs.SoCG.2020.2, doi:10.4230/LIPIcs.SoCG.2020.2.
- [4] Pankaj K. Agarwal and Jeff Erickson. Geometric range searching and its relatives. In B. Chazelle, J. E. Goodman, and R. Pollack, editors, Advances in Discrete and Computational Geometry, pages 1–56. AMS Press, 1999. URL: http://jeffe.cs.illinois.edu/pubs/survey.html.
- [5] Pankaj K. Agarwal and Jiangwei Pan. Near-linear algorithms for geometric hitting sets and set covers. Discrete & Computational Geometry, 63(2):460–482, 2020. Preliminary version in SoCG’14. doi:10.1007/s00454-019-00099-6.
- [6] Boris Aronov and Sariel Har-Peled. On approximating the depth and related problems. SIAM Journal on Computing, 38(3):899–921, 2008. doi:10.1137/060669474.
- [7] Sunil Arya, David M. Mount, Nathan S. Netanyahu, Ruth Silverman, and Angela Y. Wu. An optimal algorithm for approximate nearest neighbor searching in fixed dimensions. Journal of the ACM, 45(6):891–923, 1998. URL: https://doi.org/10.1145/293347.293348, doi:10.1145/293347.293348.
- [8] Hervé Brönnimann and Michael T. Goodrich. Almost optimal set covers in finite VC-dimension. Discrete & Computational Geometry, 14(4):463–479, 1995.
- [9] Timothy M. Chan. Random sampling, halfspace range reporting, and construction of -levels in three dimensions. SIAM Journal on Computing, 30(2):561–575, 2000. doi:10.1137/S0097539798349188.
- [10] Timothy M. Chan. Semi-online maintenance of geometric optima and measures. SIAM Journal on Computing, 32(3):700–716, 2003. URL: https://doi.org/10.1137/S0097539702404389, doi:10.1137/S0097539702404389.
- [11] Timothy M. Chan. A dynamic data structure for 3-d convex hulls and 2-d nearest neighbor queries. Journal of the ACM, 57(3):16:1–16:15, 2010. doi:10.1145/1706591.1706596.
- [12] Timothy M. Chan. Optimal partition trees. Discrete & Computational Geometry, 47(4):661–690, 2012. doi:10.1007/s00454-012-9410-z.
- [13] Timothy M. Chan. Three problems about dynamic convex hulls. International Journal of Computational Geometry & Applications, 22(4):341–364, 2012. doi:10.1142/S0218195912600096.
- [14] Timothy M. Chan and Qizheng He. Faster approximation algorithms for geometric set cover. In Proceedings of the 36th Symposium on Computational Geometry (SoCG), volume 164, pages 27:1–27:14, 2020. URL: https://doi.org/10.4230/LIPIcs.SoCG.2020.27, doi:10.4230/LIPIcs.SoCG.2020.27.
- [15] Timothy M. Chan and Konstantinos Tsakalidis. Optimal deterministic algorithms for 2-d and 3-d shallow cuttings. Discrete & Computational Geometry, 56(4):866–881, 2016.
- [16] Kenneth L. Clarkson. New applications of random sampling in computational geometry. Discrete & Computational Geometry, 2:195–222, 1987. doi:10.1007/BF02187879.
- [17] Kenneth L. Clarkson. Algorithms for polytope covering and approximation. In Workshop on Algorithms and Data Structures, pages 246–252, 1993.
- [18] Kenneth L. Clarkson and Peter W. Shor. Application of random sampling in computational geometry, II. Discrete & Computational Geometry, 4:387–421, 1989. doi:10.1007/BF02187740.
- [19] Kenneth L. Clarkson and Kasturi Varadarajan. Improved approximation algorithms for geometric set cover. Discrete & Computational Geometry, 37(1):43–58, 2007.
- [20] Artur Czumaj, Funda Ergün, Lance Fortnow, Avner Magen, Ilan Newman, Ronitt Rubinfeld, and Christian Sohler. Approximating the weight of the Euclidean minimum spanning tree in sublinear time. SIAM Journal on Computing, 35(1):91–109, 2005. doi:10.1137/S0097539703435297.
- [21] Mark de Berg, Otfried Cheong, Marc J. van Kreveld, and Mark H. Overmars. Computational Geometry: Algorithms and Applications. Springer, 3rd edition, 2008.
- [22] Greg N. Frederickson. Fast algorithms for shortest paths in planar graphs, with applications. SIAM Journal on Computing, 16(6):1004–1022, 1987.
- [23] Monika Henzinger, Stefan Neumann, and Andreas Wiese. Dynamic approximate maximum independent set of intervals, hypercubes and hyperrectangles. In Proceedings of the 36th Symposium on Computational Geometry (SoCG), volume 164, pages 51:1–51:14, 2020. URL: https://doi.org/10.4230/LIPIcs.SoCG.2020.51, doi:10.4230/LIPIcs.SoCG.2020.51.
- [24] Richard J. Lipton and Robert Endre Tarjan. Applications of a planar separator theorem. SIAM Journal on Computing, 9(3):615–627, 1980. doi:10.1137/0209046.
- [25] Chih-Hung Liu, Evanthia Papadopoulou, and D. T. Lee. An output-sensitive approach for the / -nearest-neighbor Voronoi diagram. In Proceedings of the 19th Annual European Symposium on Algorithms (ESA), volume 6942 of Lecture Notes in Computer Science, pages 70–81. Springer, 2011. doi:10.1007/978-3-642-23719-5\_7.
- [26] Jiří Matoušek. Efficient partition trees. Discrete & Computational Geometry, 8(3):315–334, 1992.
- [27] Jiří Matoušek. Reporting points in halfspaces. Computational Geometry, 2(3):169–186, 1992.
- [28] Jiří Matoušek. Range searching with efficient hierarchical cutting. Discrete & Computational Geometry, 10:157–182, 1993. doi:10.1007/BF02573972.
- [29] Nabil H. Mustafa, Rajiv Raman, and Saurabh Ray. Quasi-polynomial time approximation scheme for weighted geometric set cover on pseudodisks and halfspaces. SIAM Journal on Computing, 44(6):1650–1669, 2015. URL: https://doi.org/10.1137/14099317X, doi:10.1137/14099317X.
- [30] Nabil H. Mustafa and Saurabh Ray. Improved results on geometric hitting set problems. Discrete & Computational Geometry, 44(4):883–895, 2010. doi:10.1007/s00454-010-9285-9.
- [31] Micha Sharir. On -sets in arrangement of curves and surfaces. Discrete & Computational Geometry, 6:593–613, 1991. doi:10.1007/BF02574706.