Non-degenerate surfaces of revolution in Minkowski space that satisfy the relation
Abstract
In this work, we study spacelike and timelike surfaces of revolution in Minkowski space that satisfy , where and denote the mean curvature and the Gauss curvature of the surface and , and are constants. The classification depends on the causal character of the axis of revolution and in all the cases, we obtain a first integral of the equation of the generating curve of the surface.
1 Introduction
Consider the three-dimensional Minkowski space , that is, the real vector space endowed with the Lorentzian metric , where stand for the usual coordinates of . A vector is said spacelike if or , timelike if and lightlike if and . A submanifold is said spacelike, timelike or lightlike if the induced metric on is a Riemannian metric (positive definite), a Lorentzian metric (a metric of index ) or a degenerated metric, respectively. In the case that is a straight-line , this means that is spacelike, timelike or lightlike, respectively. If is a plane , this is equivalent that any orthogonal vector to is timelike, spacelike or lightlike respectively.
An immersion of a surface is said non-degenerated if the induced metric on is non-degenerate. In this setting, there is only two possibilities: if is positive definite , that is, it is a Riemmannian metric and the immersion is called spacelike or is a Lorentzian metric, that is, a metric of index , and the immersion is called timelike. For spacelike surfaces, the tangent planes are spacelike everywhere, and for timelike surfaces, they are timelike.
We consider spacelike or timelike surfaces in that satisfy the relation
| (1) |
where and are the mean curvature and the Gauss curvature of the surface, and , and are constants. We say that the surface is a linear Weingarten surface of . In general, a Weingarten surface is a surface that satisfies a certain smooth relation and our case, that is, surfaces that satisfy (1) is the simplest case of , that is, that is a linear function in its variables. The family of linear Weingarten surfaces include the surfaces with constant mean curvature () and the surfaces with constant Gauss curvature ().
In this work we study linear Weingarten surfaces that are rotational, that is, invariant by a group of motions of that pointwised fixed a straight-line. In such case, Equation (1) is a second ordinary differential equation that describes the shape of the generating curve of the surface. One can not expect to integrate this equation, because even in the trivial cases that or , this integration is not possible. We are going to discard the cases that is constant of is constant, which are known: see for example [1, 2, 3]. We will obtain a first integration of (1). For the particular case that , we describe all solutions, exactly, we have
Theorem 1.1
Let be a non-degenerate rotational surface in , and take if is spacelike and if is timelike. Assume that is a linear Weingarten surface such that . After a rigid motion of the ambient space, a parametrization of is as follows:
-
1.
If the axis if timelike, , where
-
2.
If the axis is spacelike, we have two possibilities:
-
(a)
The parametrization is , where
-
(b)
The parametrization is , where
-
(a)
-
3.
If the axis is lightlike, , where
2 Rotational surfaces in
In this section we describe the surfaces of revolution of and we recall the concepts of mean curvature and Gauss curvature for a non-degenerate surface. We consider the rigid motions of the ambient space that leave a straight-line pointwised fixed, called, the axis of the surface. Let be the axis of the surface. Depending on , there are three types of rotational motions. After an isometry of , the expressions of rotational motions with respect to the canonical basis are as follows:
Definition 2.1
A surface in is a surface of revolution, or rotational surface, if is invariant by some of the above three groups of rigid motions.
In particular, there exists a planar curve that generates the surface, that is, is the set of points given by . We now describe the parametrizations of a rotational surface.
-
1.
Case is a timelike axis. Consider that is the -axis. If , then is an Euclidean circle of radius in the plane . If is a planar curve in the plane , then the surface of revolution generated by writes as
(2) -
2.
Case is a spacelike axis. Consider that is the -axis. If does not belong to , then is an Euclidean hyperbola in the plane and with equation . For this kind of rotational surfaces, we have two type of surfaces:
-
(a)
If is a planar curve in the plane , then the surface of revolution generated by writes as
(3) -
(b)
If is a planar curve in the plane , then the surface is given by
(4)
-
(a)
-
3.
Case is a lightlike axis. Consider that is the straight-line . If does not belong to the plane , the orbit is the curve
The curve lies in the plane and describes a parabola in this plane, namely,
Consider a planar curve in the plane given as a graph on the straight-line , that is, . The surface of revolution generated by is
(5)
Let be surface and a non-degenerate immersion and we simply say that is non-degenerate. The surface could be not orientable, but if the immersion is spacelike, then is necessarily orientable. This is due to the following fact. At each point there is two possible choices of a unit normal vector to the tangent plane of at . The normal vector to is a timelike vector, and in Minkowski space, two any timelike vectors are not orthogonal. Thus, if , at each point , we take that unit normal vector such that . This allows to define an global orientation on , proving that is orientable. With this choice of , we say that is future directed. In the case that the immersion is timelike, we will assume that is orientable.
Let be a non-degenerate immersion of a surface and let be a Gauss map. Let be vector fields to and we denote by and the Levi-Civitta connections of and respectively. The Gauss formula says where II is the second fundamental form of the immersion. The Weingarten endomorphism is defined as . We have then , where if is spacelike and if is timelike. The mean curvature vector is defined as and the Gauss curvature as the determinant of II computed in both cases with respect to an orthonomal basis. The mean curvature is the function given by , that is, . If is an orthonormal basis at each tangent plane, with , , then
In this work we need to compute and using a parametrization of the surface. Let be a parametrization of the surface, . Then , and we have the known formulae ([5]):
| (6) |
where and are the coefficients of I and II, respectively:
where the subscripts denote the corresponding derivatives. Here is
We recall that
Finally, in order to the computations for and , we recall that the cross-product satisfies that for any vectors , . Then (6) writes as
| (7) |
| (8) |
In Minkowski ambient space, the role of spheres is played by pseudohyperbolic surfaces and pseudospheres [4]. If and the pseudohyperbolic surface centered at with radius is and the pseudosphere centered at and radius is . If is spacelike (resp. timelike) then is timelike (resp. spacelike) and (resp. ), where (resp. , being the origin of coordinates of . For both kind of surfaces, we can take and . Then and .
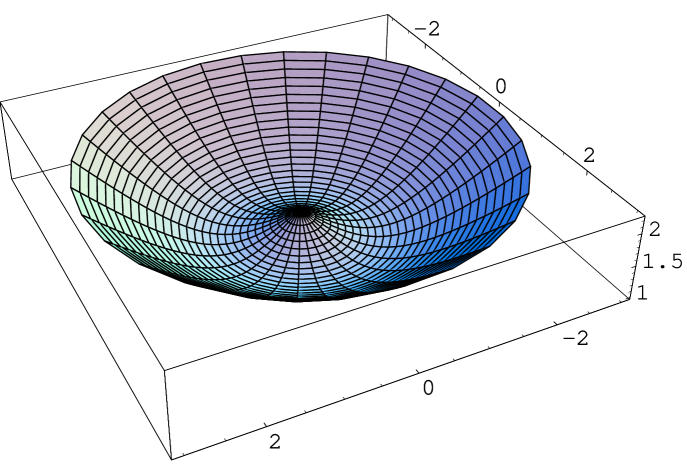
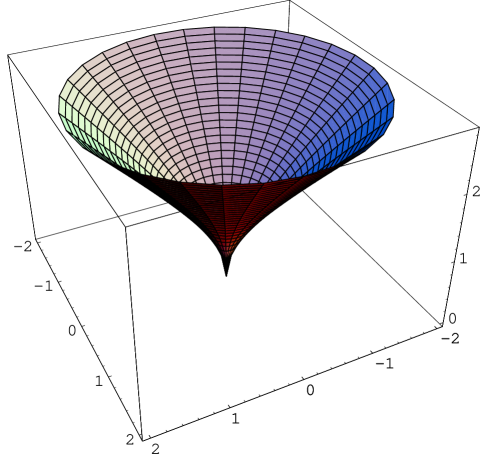
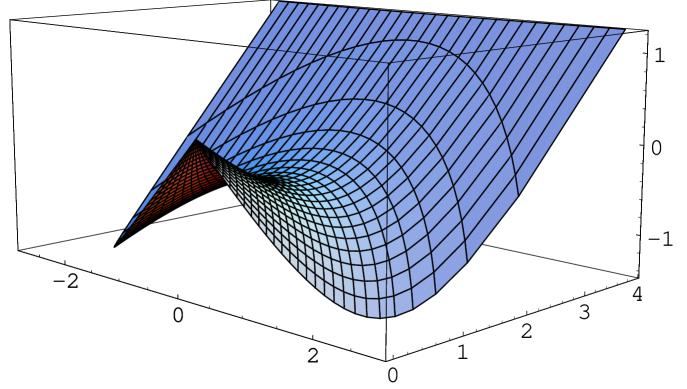
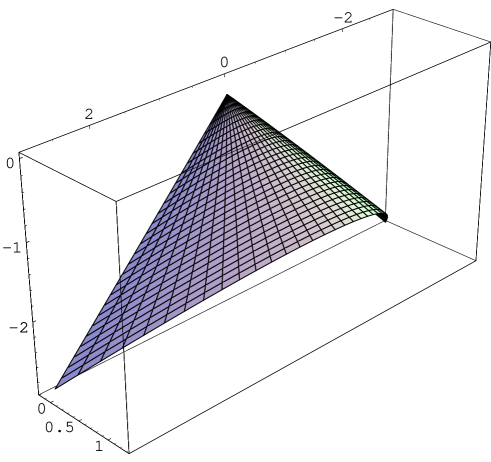
3 Rotational surfaces with timelike axis
We assume that the generating curve lies in the -plane and we parametrize as the graph of a function , that is, , . Then the surface is parametrized as in (2) and . Thus if the surface is spacelike and if is timelike. Using (7) and (8), the expressions of and are:
Then the relation (1) writes as
Multiplying by we obtain a first integral. Exactly, we have
Then there exists a integration constant such that
| (9) |
Let
Then and Equation (9) writes as . Hence, we obtain :
| (10) |
We completely solve this differential equation in two particular cases:
-
1.
Consider . Then we have
Then
From the parametrization (2) of the surface, one concludes that satisfies the equation . Letting , if , the surface is the pseudohyperbolic surface and when , is a pseudosphere .
-
2.
Assume . Then
The integration of this equation is
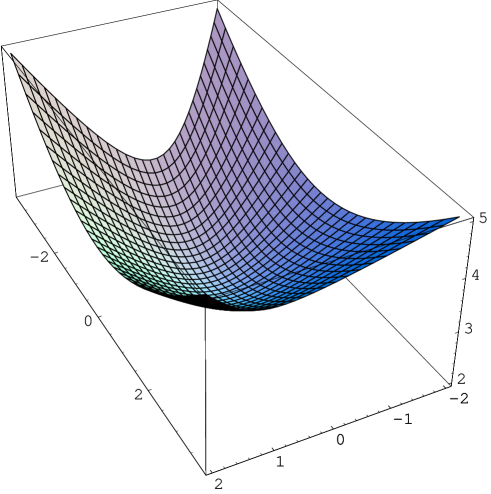
4 Rotational surfaces with spacelike axis
We distinguish two cases according the two possible parametrizations.
-
1.
Case I. Assume that the parametrization is given by (3). The relation (1) writes as
Multiplying by , we obtain a first integral. Exactly, we have
Then there exists an integration constant such that
(11) Now we take . Then Equation (11) writes as
Then
(12) We completely solve this differential equation in two particular cases:
-
(a)
Consider . Then we have
The solution of this differential equation is
From the parametrization (3) of the surface, one concludes that satisfies the equation . Thus, if we set , for we obtain that is the pseudohyperbolic surface and for , is the pseudosphere .
-
(b)
Assume . Then
The integration of this equation is
-
(a)
-
2.
Case II. The expression of the parametrization is written in (4). In this case, the surface is timelike, since . The Weingarten relation (1) is
Multiplying by again, we have
It follows the existence of an integration constant such that
(13) If we set , Equation (13) is , obtaining
(14) As in the previous case, we solve this equation in the next two cases:
-
(a)
If , then
The solution of this equation is
This surface is the pseudosphere , with since by the expression of the parametrization (4), the coordinates of satisfies .
-
(b)
If , then
The solution of this equation is
-
(a)
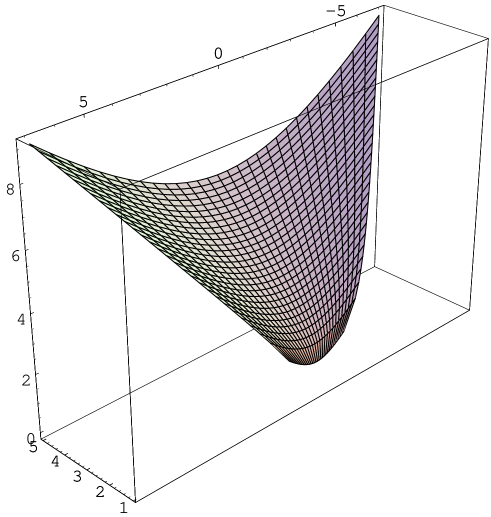
5 Rotational surfaces with lightlike axis
Consider the parametrization given in (5). Then and the relation (1) writes as
Multiplying by we obtain a first integral. Exactly, we have
Then there exists a integration constant such that
| (15) |
From (15), we obtain the value of :
As in the two previous cases, we distinguish two special cases:
-
1.
If , then
We solve this equation obtaining
From the parametrization (5), we see that satisfies the equation . Thus, if , we have that if , and if .
-
2.
Assume . Then
We point out that and that combining with , we have . The solution is
References
- [1] J.I. Hano, K. Nomizu, Surfaces of revolution with constant mean curvature in Lorentz- Minkowski space, Tohoku Math. J., 36 (1984), 427 -435.
- [2] R. López, Timelike surfaces in Lorentz 3-space with constant mean curvature, Tohoku Math. J., 52 (2000), 515–532.
- [3] R. López, Surfaces of constant Gauss curvature in Lorentz-Minkowski 3-space, Rocky Mount. J. Math., 33 (2003), 971–993.
- [4] B. O Neill, Semi-Riemannian geometry with applications to relativity, Academic Press, New York, 1983.
- [5] T. Weinstein, An introduction to Lorentz surfaces, Walter de Gruyter, Berlin, 1995.