On geometric properties of ratio of two hypergeometric functions
Toshiyuki Sugawa
Graduate School of Information Sciences
Tohoku University
Aoba-ku, Sendai 980-8579, Japan
sugawa@math.is.tohoku.ac.jp and Li-Mei Wang
School of Statistics,
University of International Business and Economics, No. 10, Huixin
Dongjie, Chaoyang District, Beijing 100029, China
wangmabel@163.com
Abstract.
R. Küstner proved in his 2002 paper that
the function
maps the unit disk onto a domain convex in the
direction of the imaginary axis under some condition
on the real parameters
Here stands for the Gaussian hypergeometric function.
In this paper, we study the order of convexity of
In particular, we partially solve the problem raised by the afore-mentioned
paper by Küstner.
Key words and phrases:
Gaussian hypergeometric functions,
continued fractions, convexity, Hadamard product
2010 Mathematics Subject Classification:
Primary 30C45; Secondary 33C05
This research is supported by National Natural Science Foundation of China (No.
11901086).
1. Introduction and main results
For a domain in the complex plane , let denote the set
of all holomorphic functions in .
Throughout the paper, we will denote by the open unit disk
and by
the slit domain .
Let be the subset of consisting of functions normalized by
and be the subset of consisting of
univalent functions on
For a non-constant function ,
the order of convexity is defined by
Note that is affine invariant; that is
for constants with
Similarly, we can define the order of starlikeness (with
respect to the point ) of by
It is known that is convex, i.e.
if and only if is univalent in and is a convex domain;
and is starlike, i.e. ,
if and only if is univalent in and is a starlike domain
with respect to the point .
For , a function is called starlike of order
if
We denote by the class of those starlike functions
of order .
The function in
is extremal in many respects.
Note that is nothing but the Koebe function.
The convolution (or Hadamard product) of two
functions with power series
and
is defined by
Obviously, .
We now recall the notion of subordination between two holomporphic
functions and on We say that is subordinate to
and write or if there exists a holomorphic
function on such that
and for
Note that and if
When is univalent, the converse is also true.
Our present work is inspired by the following inclusion for
(1.1)
where stands for the closed convex hull and the function
is defined by
The above relation (1.1) is contained in the proof of [6, Thm. 2.7, p. 56].
Küstner [2] posed the problem asking whether the following
subordination holds for or not:
(1.2)
If is convex on
the unit disk, the above subornation follows from (1.1).
Therefore, it is an interesting problem
to find conditions on and so
that the superordinate function is convex on .
Note that, as is already speculated in [2, p. 608] by numerical computations,
is not convex for certain parameters
Since is not expressed in terms of elementary functions in general,
we need special function techniques to attack this problem.
The Gaussian
hypergeometric function is defined for by
the power series expansion
where is the Pochhammer symbol, i.e., and
for . Here are
complex numbers with .
Note that by definition.
Hypergeometric functions can be
analytically continued along any path in the complex plane that avoids the
branch points and .
In particular, they are defined on as single-valued holomorphic functions.
For more properties of the hypergeometric functions, we refer to the handbook
[1].
The extremal function of may be
expressed in terms of hypergeometric functions as
A simple computation shows that
Thus the problem can be formulated in terms of the hypergeometric functions.
In relation with this problem, Küstner [2] proved that
the function
(1.3)
maps univalently onto a domain convex in the direction of the imaginary axis
(see Lemma 2.3 below).
It might be noteworthy that has another expression
when
Indeed, and
Here and are the complete elliptic integrals of the first and second
kind, respectively:
Our primary aim in this paper is to estimate the order of convexity for the
mapping and then apply it to the function
For convenience, we put
As we will see in (2.1) and Lemma 2.1 below,
and
Therefore, we may assume, for instance, if convenient.
Our main results are the following two theorems.
Theorem 1.1.
for positive real parameters and with
and
In particular, the function
is not convex on in this case.
In particular, we have
The assumption cannot be dropped in general.
Indeed, if we choose and then
and
Theorem 1.2.
Let , and be real numbers with and
Then the order of convexity
of satisfies the following:
Letting in Theorem 1.2,
we thus obtain a lower estimate of as follows.
Corollary 1.3.
If and if then
In particular, is convex when
In view of Theorem 1.1, the
condition in Corollary 1.3
is necessary for the convexity of the function
in the range
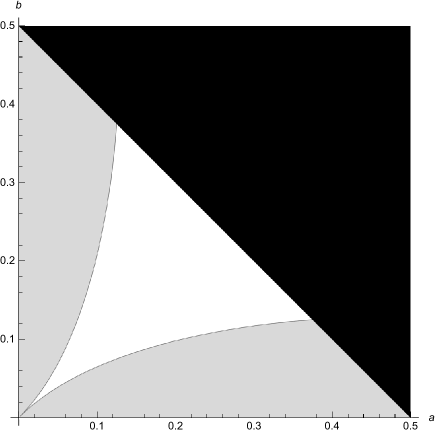
The picture in Figure 1 was produced by Mathematica based on Theorems 1.1
and 1.2. Note that the white region does not necessarily
mean
Figure 1. in the gray region whereas in the black region.
Putting and in Corollary 1.3,
we arrive at the following result
solving partially the problem of Küstner which is mentioned above.
Corollary 1.4.
Let be real numbers with
and .
If
then the subordination
holds for and .
2. Preliminaries
This section is devoted to some results on hypergeometric
functions which will be used in the proof of main theorems.
Formulas concerning the hypergeometric functions
without specific references below can be found
in [1] and [5].
Lemma 2.1.
Proof.
By the derivative formula, we have (see [2, (2.3)])
(2.1)
We thus see that the order of convexity
of is the same as that of
which is symmetric in and
Hence the required relation follows.
∎
A sequence of real numbers is called totally monotone
or completely monotone
if for all integers
Here, is defined recursively by and
for and
The following lemma is useful for our aim
(see Theorems 69.2 and 71.1 in [10]).
Lemma 2.2.
Let with
Then the following three conditions are mutually equivalent:
(i)
for a totally monotone sequence
(ii)
for a positive Borel measure on
(iii)
There exists a sequence with
for such that
We denote by the class of functions with
satisfying one (and hence all) of the above three conditions.
In what follows, we write
It is easily seen that for
and
Note that a function can be analytically continued on the domain
by using the integral representation in condition (ii).
Therefore, we can regard as a subset of
Let be the class of functions of
the form for some
Since the sequence is totally monotone
for a totally monotone sequence
the function belongs to for provided that
Geometric properties of functions
are investigated by many authors (see [4], [7] and
[13] for instance).
Among others, Wirths [13] showed that a function in maps both
the half-plane and the unit disk
univalently onto domains convex in the direction of the imaginary axis
(see also [2, Lem. 3.1]).
Küstner [2] studied hypergeometric functions
in connection with the class
Especially, the following result is important in the present work.
Let be a sequence of real numbers which satisfies
either or
Then the continued fraction
converges uniformly on .
Moreover, its values lie in the closed disk
This estimate is simple and useful but it does not work for
a function of the form in condition (iii) of Lemma 2.2
with
We offer a variant of the above estimate as follows.
Lemma 2.5.
Let with
Then for
Proof. Let be a positive Borel measure on
as in (ii) of Lemma 2.2.
Noting the inequality for and
we now estimate
∎
The above inequality means that the value lies in the
closed disk centered at
with radius
This refines the obvious estimate
for
When is not a constant, we can exclude the equality case,
by the maximum modulus principle.
We note here transformations of continued fractions.
Lemma 2.6.
[10, Thm. 69.2 and (75.6)]
Let be a sequence satisfying
for
and
Then
and therefore this function belongs to the class
Applying the above lemmas, we have the following result.
Lemma 2.7.
For and , one has the expressions
Here, the functions and belong to the class and
they are described by
Recall in (2.2).
Applying Lemma 2.4 to the functions and we obtain the following.
Lemma 2.8.
Let and
Then, for
In particular,
(2.3)
By the form of in Lemma 2.7,
we have
Using the relation we have the following result
([11, Lem. 2.2], see also [12, Lem. 2.5]).
Lemma 2.9.
If and , then
We also need the following information about the asymptotic behavior of
as
Lemma 2.10.
Let and be real numbers for which
none of belongs to .
The asymptotic behavior of the function
as in
unrestricted approach is described as follows.
(i)
If , then
where ,
and
(2.4)
(ii)
If , then
(iii)
If then
where
and
(2.5)
Proof. The first two assertions can be found in
[11, Lem. 2.3], see also [12, Lem. 2.4].
We need only to
prove the last one.
Suppose that so that
Applying the general formula on
(2.6)
to the functions
and ,
we obtain
and
where
Noting the functional relation
we obtain the required asymptotic.
∎
When and , similarly as above, we obtain
where .
The corresponding results in
[11, Lem. 2.3] and [12, Lem. 2.4]
should be modified to this form.
In this section, we will write , ,
,
and for the sake of notational brevity.
Since the order of convexity of is related to the
image of under the function , we will express in terms of for a later use.
It is easy to see that is expressed by
First note that the formula (2.1) means
Since and satisfy the hypergeometric differential equations, we have
and
Hence, we have
Now we are able to rearrange the form of as
By the formula similar to (2.1) and
Gauss’ contiguous relation
we compute
Finally, we arrive at the expression
(3.1)
where
(3.2)
Now we are ready to prove the first main result.
Proof of Theorem 1.1.
By the definition of the order of convexity,
it suffices to prove that as along a curve in
(If we know that is zero-free on we can conclude that )
Indeed, we take a tangential approach to along the circle
Note that
We divide the proof into three cases according to the sign of .
as where is given in (2.5) and
In particular, and as
We note that and as well, by assumption.
Thus we see that under the present conditions.
Using (3.1), we obtain
and, in particular, as
∎
We remark that the radial approach to does not necessarily give the
required behavior.
Indeed, for example, in Case I above, and for
In this section, we will use the same notations as in the previous section.
We first give a slightly more general but less explicit estimate of than
that in Theorem 1.2.
Recall that the functions and are defined in (1.3) and
Lemma 2.7 and they all belong to the class
We now define a new function by
(4.1)
Theorem 4.1.
Let , and be real numbers with and
Then the order of convexity of is estimated as
(4.2)
Proof. The function defined in (3.2) can be described in terms of :
By Lemma 2.7, the function belongs to
In particular,
(It is not difficult to see that equality does not hold.)
Since by Lemma 2.10, we have and
By assumption, so that only the first case occurs.
Therefore,
(4.3)
(Note that the above limits may be taken to be the unrestrected ones as
in )
Now Lemma 2.5 implies that lies in the
closed disk with the diameter
Since
is contained in the half-plane .
Note that the Möbius transformation
maps a closed disk in onto another closed disk.
Thus, we see that the image of under
the mapping lies in the disk
whose diameter is the line segment with endpoints
and .
Therefore, in conjunction with the equation (4.3), we have
(4.4)
for since .
Note that for and
Since we observe that
(4.5)
for .
By the inequality for together with
(4.4) and (4.5), we have
We note that a similar estimate may be obtained when in the above proof.
It seems, however, that the obtained estimate for is not better than
that for applied to (4.2) by interchanging and
Proof of Theorem 1.2.
Since by Lemma 2.9,
Theorem 1.2 now
follows from Theorem 4.1.
∎
We remark that the estimate in Theorem 1.2 can be
improved by using the continued fraction expansions of
as was indicated in [2, Rem. 2.3].
For instance, by Lemma 2.3, we obtain
References
[1]
M. Abramowitz and I. Stegun, Handbook of Mathematical
Functions, Dover, New York, 1965.
[2]
R. Küstner, Mapping properties of hypergeometric functions
and convolutions of starlike or convex functions of order ,
Comput. Methods Funct. Theory, 2 (2002), 597–610.
[3]
by same author, On the order of starlikeness of the shifted
Gauss hypergeometric function, J. Math. Anal. Appl. 334
(2007), 1363–1385.
[4]
B.-Y. Long, T. Sugawa and Q.-H. Wang,
Completely monotone sequences and harmonic mappings,
Ann. Fenn. Math. 47 (2022), 237–250.
[5]
F. W. Olver, D. W. Lozier, R. F. Boisvert, C. W. Clark, NIST Handbook of Mathematical
Functions, Cambridge University Press, 2010.
[6]
S. Ruscheweyh, Convolutions in Geometric Function Theory,
Séminaire de Mathématiques Supérieures, vol. 83, Les Presses de
l’Université de Montréal, Montréal, 1982.
[7]
S. Ruscheweyh, L. Salinas, and T. Sugawa, Completely monotone sequences and universally prestarlike functions, Isr. J. Math. 171(2009), 285-304.
[8]
T. Sugawa and L.-M. Wang, Spirallikeness of shifted hypergeometric functions, Ann. Acad. Sci. Fenn. Math. 42 (2017), 963-977.
[9]
H. S. Wall, A class of functions bounded in the unit circle,
Duke Math. J. Vol. 7, 1 (1940), 146-153.
[10]
by same author, Analytic Theory of Continued Fractions,
D. Van Nostrand Co. Inc., New York, 1948.
[11]
L.-M. Wang, On the order of convexity for the shifted hypergeometric functions,
Comput. Methods Funct. Theory 21, 505–522 (2021).
[12]
by same author, Mapping properties of the zero-balanced hypergeometric functions,
J. Math. Anal. Appl. 505 (2022) 125448.