Proofs of the Technical Results Justifying a Biologically Inspired Algorithm for Reactive Navigation of Nonholonomic Robots in Maze-Like Environments
, ,
1 Introduction
Inspired by behaviors of animals, which are believed to use simple, local motion control rules that result in remarkable and complex intelligent behaviors [1, 2, 3], we examine the navigation strategy that is aimed at reaching a steady target in a steady arbitrarily shaped maze-like environment and is composed of the following reflex-like rules:
-
s.1)
At considerable distances from the obstacle,
-
(a)
turn towards the target as quickly as possible;
-
(b)
move directly to the target when headed to it;
-
(a)
-
s.2)
At a short distance from the obstacle,
-
(c)
Follow (a,b) when leaving from the obstacle;
-
(d)
When approaching it, quickly avert the collision threat by sharply turning.
-
(c)
Studies of target pursuit in animals, ranging from dragonflies to fish and dogs to humans, have suggested that they often use the pure pursuit guidance s.1) to catch not only a steady but also a moving target. The idea of local obstacle avoidance strategy s.2) is also inspired by biological examples such as a cockroach encountering a wall [2].
The rules s.1), s.2) demand only minor perceptual capacity. Access even to the distance to the obstacle is not needed: it suffices to determine whether it is short or not, and be aware of the sign of its time derivative. As for the target, the vehicle has to access its relative bearing angle. Moreover, it suffices that it is able only to recognize which quadrant of its relative Cartesian frame hosts the target line-of-sight.
To address the issue of nonholonomic constraints, control saturation, and under-actuation, we consider a vehicle of the Dubins car type. It is capable of moving with a constant speed along planar paths of upper limited curvature without reversing the direction and is controlled by the upper limited angular velocity. As a result, it is unable to slow down, stop, or make an abrupt turn.
By reliance on the bearing-only data about the target, the proposed approach is similar to the Pledge algorithm [4] and Angulus algorithm [5]. Unlike ours, the both assume access to the absolute direction (e.g., by a compass), and the latter employs not one but two angles in the convergence criterion. The major distinction is that they assume the vehicle to be able to trace the paths of unlimited curvature, in particular, broken curves and to move exactly along the obstacle boundary. These assumptions are violated in the context of this paper, which entails deficiency in the available proofs of the convergence of these algorithms.
The extended introduction and discussion of the proposed control law are given in the paper submitted by the authors to the IFAC journal Automatica. This text basically contains the proofs of the technical facts underlying justification of the convergence at performance of the proposed algorithm in that paper, which were not included into it due to the length limitations. To make the current text logically consistent, were reproduce the problem statement and notations.
2 Problem Setup and the Navigation Strategy
We consider a planar under-actuated nonholonomic vehicle of the Dubins car type. It travels with a constant speed without reversing direction and is controlled by the angular velocity limited by a given constant . There also is a steady point target and a single steady obstacle in the plane, which is an arbitrarily shaped compact domain whose boundary is Jordan piece-wise analytical curve without inner corners. Modulo smoothened approximation of such corners, this assumption is typically satisfied by all obstacles encountered in robotics, including continuous mazes. The objective is to drive the vehicle to the target with constantly respecting a given safety margin . Here is the distance to the obstacle
| (1) |
is the Euclidian norm, and is the vehicle position.
This position is given by the abscissa and ordinate of the vehicle in the world frame, whereas its orientation is described by the angle from the abscissa axis to the robot centerline. The kinematics of the considered vehicles are classically described by the following equations:
| (2) |
Thus the minimal turning radius of the vehicle is equal to
| (3) |
The vehicle has access to the current distance to and the sign of its time-rate , which are accessible only within the given sensor range: , where . The vehicle also has access to the angle from its forward centerline ray to the target.
To specify the control strategy s.1), s.2), we introduce the threshold separating the ’short’ and ’long’ distances to the obstacle. Mathematically, the examined strategy is given by the following concise formula:
| (4) |
Here is a constant controller parameter, which gives the turn direction, and and are equivalent to the vehicle orientation outwards and towards . The switch occurs when reduces to ; the converse switch holds when increases to . When mode is activated, ; if , the ’turn’ submode is set up. Since the control law (4) is discontinuous, the solution of the closed-loop system is meant in the Fillipov’s sense [6].
Remark 1.
In (4), accounts for not only the heading but also the sum of full turns performed by the target bearing.
In the basic version of the algorithm, the parameter is fixed. To find a target hidden deeply inside the maze, a modified version can be employed: whenever , the parameter is updated. The updated value is picked randomly and independently of the previous choices from , with the value being drawn with a fixed probability . This version is called the randomized control law.
To state the assumptions, we introduce the Frenet frame of at the point ( is the positively oriented unit tangent vector, is the unit normal vector directed inwards , the boundary is oriented so that when traveling on one has to the left), is the signed curvature ( on concavities) and . Due to the absence of inner corners, any point at a sufficiently small distance from does not belong to the focal locus of and is attained at only one point [7]. The regular margin of is the supremum of such ’s. So for convex domains; for non-convex ,
| (5) |
(The infimum over the empty set is set to be .)
Assumption 1.
The vehicle is maneuverable enough: it is capable of full turn without violation of a safety margin within the regularity margin of the maze , and moreover .
Assumption 2.
The sensor range gives enough space to avoid collision with after its detection: .
3 Main Results
Theorem 1.
(i) With probability , the randomized control law drives the vehicle at the target for a finite time with always respecting the safety margin (i.e., there exists a time instant such that and ) whenever both the vehicle initial location and the target are far enough from the obstacle and from each other:
| (7) |
(ii) The basic control law drives the vehicle at the target for a finite time with always respecting the safety margin whenever (7) holds and the vehicle initial location and the target lie far enough from the convex hull of the maze: .
In (7), can be relaxed into if the vehicle is initially directed to the target . In view of (3) and the freedom (6) in the choice of , not only Assumptions 1, 2 but also the constraints (7) disappear (are boiled down into ) as . In other words, the algorithm succeeds in any case if the cruise speed is small enough.
The last assumption from (ii) can be relaxed to cover some scenarios with the target inside the maze. To specify this, we need some notations and definitions.
The -equidistant curve of is the locus of points at the distance from ; the -neighborhood of is the area bounded by ; is the straight line segment directed from to .
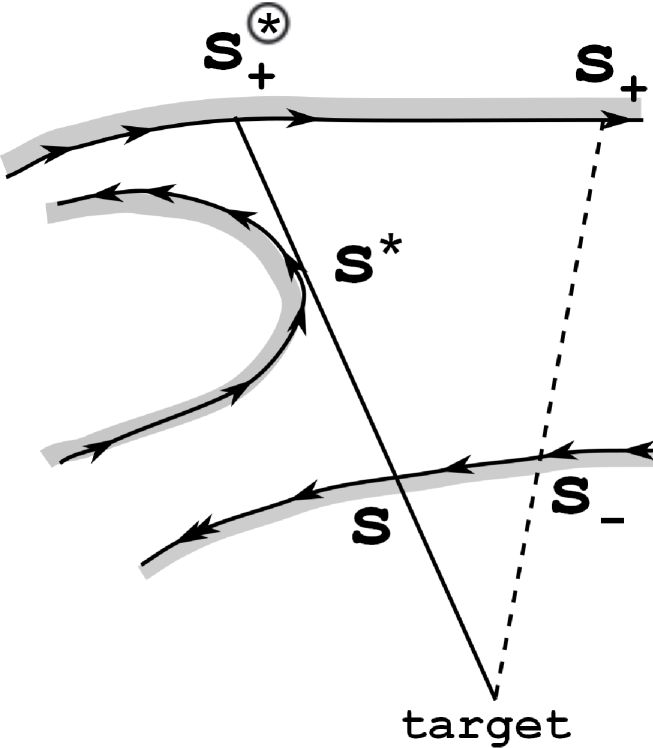
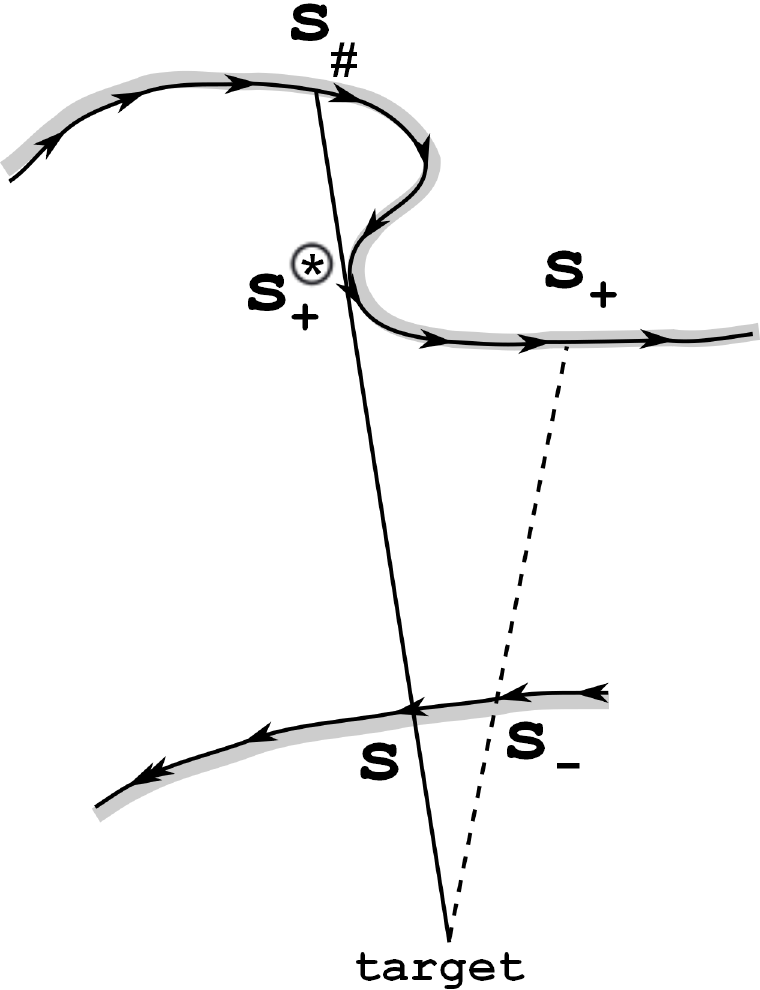
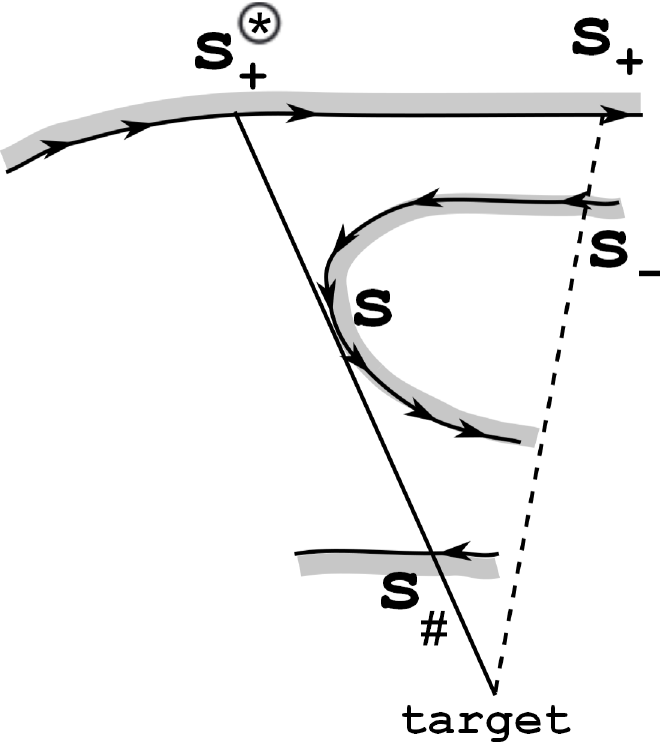
Let and . The points divide into two arcs. Being concatenated with , each of them gives rise to a Jordan curve encircling a bounded domain, one of which is the other united with . The smaller domain is called the simple cave of with endpoints . The location is said to be locked if it belongs to a simple cave of whose endpoints lie on a common ray centered at . We remark that if , the location is unlocked.
Theorem 2.
The basic control law drives the vehicle at the target for a finite time with always respecting the safety margin whenever (7) holds and both the initial location of the vehicle and the target are unlocked.
Now we disclose the tactical behavior implied by s.1), s.2) and show that it includes wall following in a sliding mode. In doing so, we focus on a particular avoidance maneuver (AM), i.e., the motion within uninterrupted mode .
Let be the natural parametric representation of , where is the curvilinear abscissa. This abscissa is cyclic: and encode a common point, where is the perimeter of . We notationally identify and . For any within the regular margin , the symbol stands for the boundary point closest to , and , where is the vehicle location at time .
To simplify the matters, we first show that can be assumed -smooth without any loss of generality. Indeed, if , the equidistant curve is -smooth and piece-wise -smooth [7]; its parametric representation, orientation, and curvature are given by
| (8) |
The second formula holds if is not a corner point of ; such points contribute circular arcs of the radius into . So by picking small enough, expanding to , and correction of , we keep all assumptions true and do not alter the operation of the closed-loop system. Hence can be assumed -smooth.
Writing means that there exists small enough such that if . The similar notations, e.g., , are defined likewise.
Proposition 3.
Let for the vehicle driven by the control law (4), obstacle avoidance be started with zero target bearing at . Then the following claims hold:
-
(i)
There exists such that the vehicle moves with the maximal steering angle and the distance to the obstacle decreases until ,***This part of AM is called the initial turn and abbreviated IT. and at , the sliding motion along the equidistant curve †††This is abbreviated SMEC and means following the wall at the fixed distance , which is set up at the start of SMEC. is started with and ;
-
(ii)
SMEC holds until arrives at zero at a time when , which sooner or later holds and after which a straight move to the target‡‡‡SMT, which is sliding motion over the surface is commenced;
-
(iii)
During SMT, the vehicle first does not approach the obstacle and either the triggering threshold is ultimately trespassed and so mode is switched off, or a situation is encountered where and . When it is encountered, the vehicle starts SMEC related to the current distance;
- (iv)
-
(v)
The number of transitions is finite and finally the vehicle does trespass the triggering threshold , thus terminating the considered avoidance maneuver;
-
(vi)
Except for the initial turn described in (i), the vehicle maintains a definite direction of bypassing the obstacle: is constantly positive if (counterclockwise bypass) and negative if (clockwise bypass).
By (4), AM is commenced with . The next remark shows that if , IT may have the zero duration.
Remark 3.1.
If , IT has the zero duration if and only if . Then the following claims are true:
-
1.
If , SMEC is immediately started;
-
2.
If , the duration of SMEC is zero, and SMT is continued.
4 Technical facts underlying the proofs of Proposition 3 and Remark 3.1.
4.1 Geometrical Preliminaries
We assume that the world frame (WF) is centered at the target . Let be a regular piece-wise smooth directed curve with natural parametric representation . The turning angle of around a point is denoted by , and , where is the Frenet frame of at .§§§ At the corner points, the count of progresses abruptly according to the conventional rules [7]. Let and stand for the Cartesian coordinates and polar angle of in this frame (see Fig.1(a)), respectively,
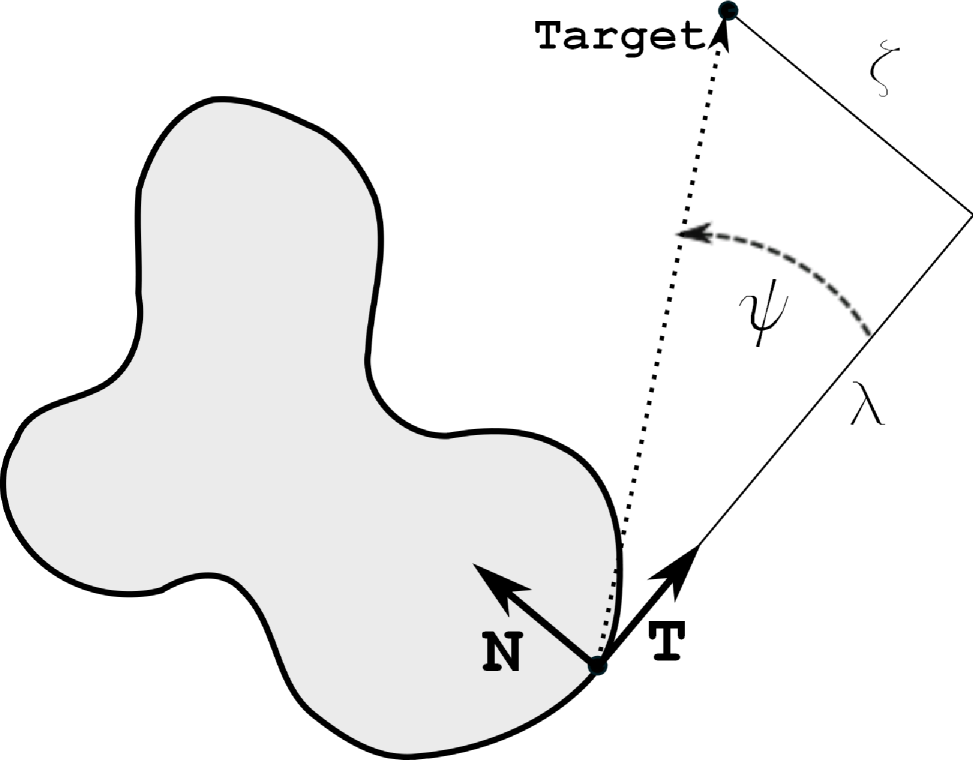
and let ′ denote differentiation with respect to . The polar angle of in WF and the curvature of at are denoted by and , respectively. To indicate the curve , the symbols , etc. may be supplied with the lower index C. The directed curve traced as runs from to is denoted by , where the specifier is used for closed curves. The superscript a means that the lemma is equipped with the number under which its formulation is given in the basic version of the paper.
Lemma 4.
a The following relations hold whenever :
| (13) | |||
| (14) |
Differentiation of the equation and the Frenet-Serret formulas [7] yield that Equating the cumulative coefficients in this linear combination of and to zero gives the first two equations in (13). By virtue of them, the third and forth ones follow from [7]
| (15) |
The first relation in (14) holds since . Let , where is the polar angle of . The matrix of rotation through transforms the world frame into the Frenet one, and . So . Thus is the piece-wise continuous polar angle of that jumps according to the convention concerned by footnote . This trivially implies (14).
Corollary 4.1.
Let and . Then
| (16) |
Corollary 4.2.
There exist and such that whenever , the set has no more than connected components.
By the last inequality in (7), . Then . Since the domain is compact, . So whenever and , the function does not change its sign in the -neighborhood of .
Since is piece-wise analytical, each set and has finitely many connected components and , respectively. By the foregoing and (13), any intersection contains only one point . Hence the entire arc of the length contains no more than such points. It remains to note that covers any such that .
Observation 1.
SMEC with ends when . This set has no more than connected components, called arcs.
4.2 Technical Facts
Lemma 5.
The following two statements hold:
(i)
In the domain , the
surface is sliding, with the equivalent control [6] ;
(ii)
The surface is sliding in the domain
| (18) |
(i) Let be the distance from the vehicle to . Due to (2), . So as the state approaches the surface , we have , which implies the first claim.
(ii) Let be the polar angle of the vehicle velocity in the frame . By (5), (6), and (18), , and as is shown in e.g., [8],
| (19) |
As the state approaches a point where and (18) holds,
| (20) |
If the state remains at a definite side of the surface , (3) and (4) yield that
| (21) |
The proof is completed by observing that by (6), (18),
| (24) | |||
| (25) |
The subsequent proofs are focused on ; the case is considered likewise.
Lemma 6.
If , claim (i) in Proposition 3 is true.
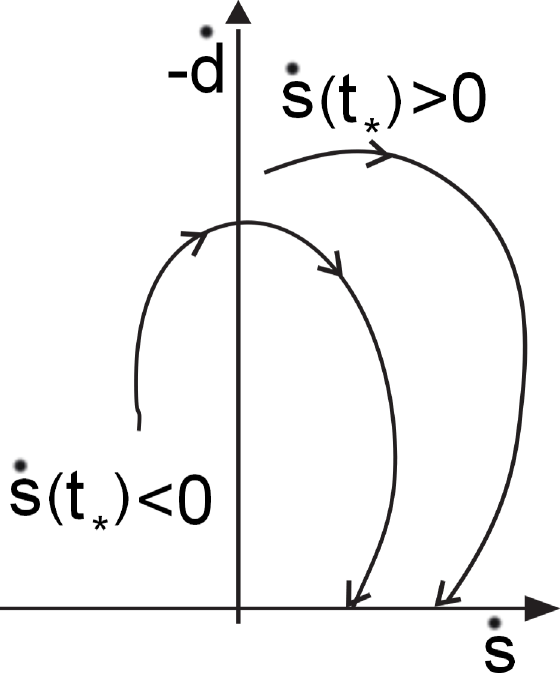
Let . Due to (4), initially . Let denote the maximal interval on which . For , the vehicle moves clockwise along a circle of the radius and so by Remark 1, and
| (26) |
While (in particular, while ) the expression in the last square brackets is positive. This is true by (26) if ; otherwise, since by (6). So , i.e., the vector rotates clockwise. Here the signs of the first and second components equal those of and , respectively, by (19) and so evolves as is illustrated in Fig. 1(b). This and the conditions (18) for the sliding motion complete the proof.
More can be derived from the above proof.
Lemma 9.
a Let and be the values of the continuously evolving at the start and end of IT, respectively. During IT, if , and ones changes the sign otherwise. In any case, runs from to in the direction during a last phase of IT.
Let . The map is the orientation-reversing immersion on the disc encircled by . So it transforms any negatively oriented circle concentric with into a curve with . Then the argument from the concluding part of the proof of Lemma 6 shows that as the robot once runs over in the negative direction, the vector intersects the half-axes of the frame in the order associated with counter clockwise rotation, each only once. This immediately implies the claim given by the first sentence in the conclusion of the lemma.
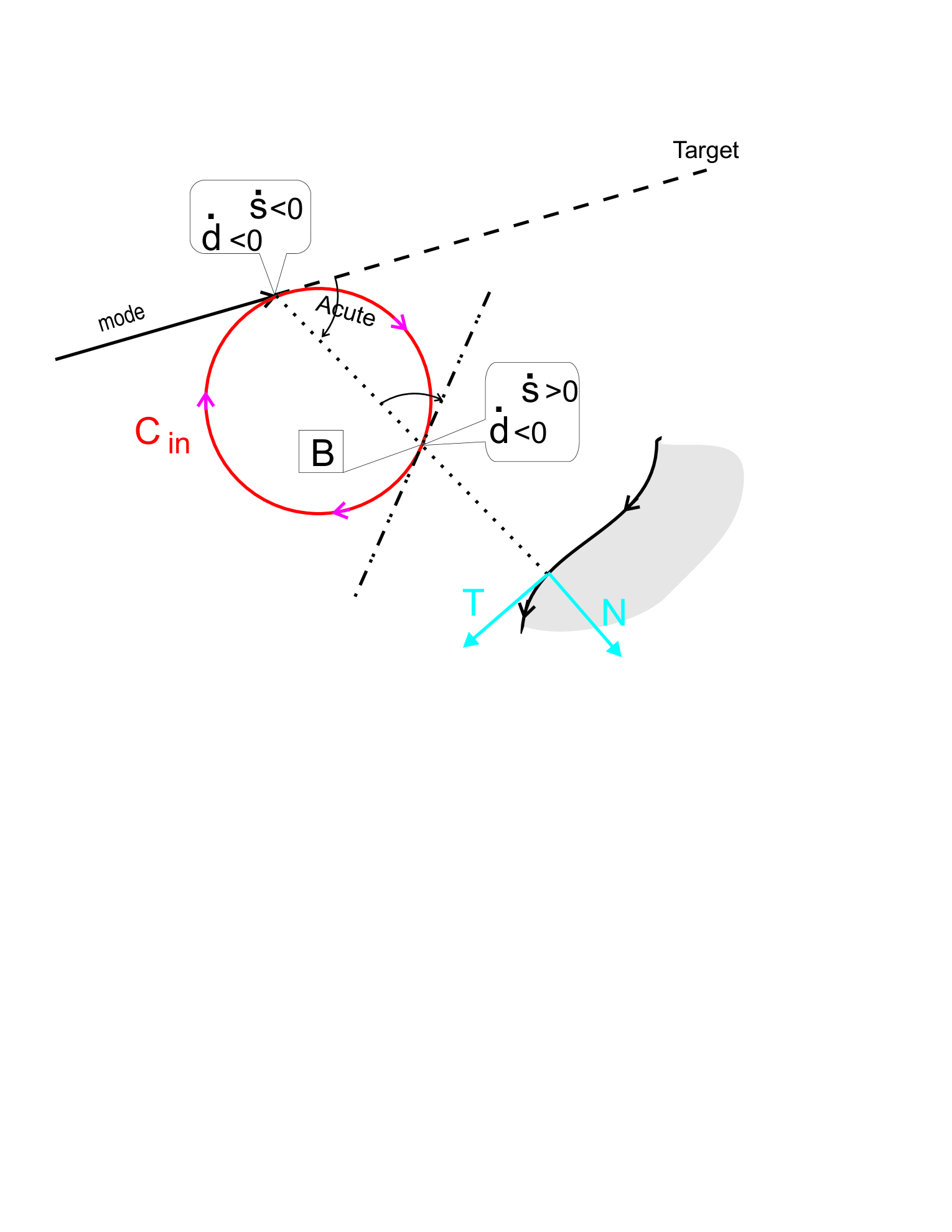
If , this claim yields that . Let . As the robot once runs over in the negative direction, and when it passes the point from Fig. 2(a), which corresponds to the second passage of . Due to the order in which intersects the half-axes, this combination of signs is possible only before vanishes for the first time, i.e., within IT. Thus the second occurrence of holds within IT. The proof is completed by noting that after this by the first claim of the lemma.
We proceed to the case where some of the vector fields is tangential to the discontinuity surface . Since this may undermine uniqueness of the solution (its existence is still guaranteed), the arguments become much more sophisticated. The first lemma establishes a required technical fact. To state it, we note that whenever , the system state is given by and along with , uniquely determines .
Lemma 7.
If for , there exists such that whenever and , the following entailments hold with :
| (29) | |||
| (32) |
In (32), if or on .
We pick so that and do not change the sign as and run over and , respectively. By (8), the curvature does not change its sign either, which equals .
If the conditions from (29) hold and , application of the second equation from (13) to yields that . So the target polar angle in the -related Frenet frame of belongs to . Transformation of this frame into that of the vehicle path consists in a move of the origin in the negative direction along the -axis (since ) and a clockwise rotation of the axes (since ). Since both operations increase the target bearing angle, . Formula (29) with and (32) are established likewise.
Lemma 7.
a Let , at a time within mode . Then for , the robot
-
i)
performs the turn with if , , and ;
-
ii)
undergoes SMEC if and either (1) or (2) and ;
-
iii)
moves straight to the target if .
Let i) fail to be true and . If there exists an infinite sequence such that and as , a proper decrease of every yields in addition that since . However then for by (4), (33) and thus for , i.e., (i) holds in violation of the initial assumption. It follows that .
Now suppose that there is a sequence such that , as . Then and so due to (29). By continuity, in a vicinity of the system state at . Then any option from (4) yields and so by the definition of Filippov’s solution. Hence , in violation of the foregoing. So and for by (4), and by Lemma 5, SMT is continued. Then the last relation in (20) (with ) and imply the contradiction to the foregoing, which proves i).
Let . So far as the controller is first probationally set to the submode related with , this submode will be maintained longer by (33).
ii.1) If , the claim is true by Lemma 5. Let . If there is a sequence such that and as , a proper decrease of every yields in addition that . Let be the minimal such that and for . For such , by (4) and so by (21) and (25). So , and , otherwise is not the minimal . Thus at time , the assumptions of Lemma 6 hold except for . In the proof of this lemma, this relation was used only to justify that , which is now true by assumption and the continuity argument. So by Lemmas 5 and 6, sliding motion along an equidistant curve with is commenced at the time when and maintained while and , in violation of . This contradiction proves that .
Now suppose that there exists a sequence such that and as . Since , a proper perturbation of every yields in addition that . Let be the minimal such that for . For such , the continuity argument gives , (4) yields and so by (21) and (25). Hence and so , in violation of the foregoing. This contradiction proves that indeed.
ii.2) We first assume that . Due to (21) and (25)
| (34) |
So it is easy to see that and . Suppose that and so . In any right-vicinity , there is such that . For any such that lies sufficiently close to , (29) yields . So by (4) and by (34). Hence the inequality is not only maintained but also enhanced as decreases from to , in violation of the assumption of the lemma. This contradiction shows that , thus completing the proof of ii).
It remains to consider the case where . By the arguments from the previous paragraph, it suffices to show that and . Suppose that , i.e., there exists a sequence such that and as . Since , a proper decrease of every gives in addition. By (4), (34), the inequality is maintained and enhanced as decreases from , remaining in the domain . Since , there is such that and . Hence and if is large enough, there is such that and . Furthermore, there is such that , . Then by (29). We note that for the vehicle path and so as . This and (13) (applied to ) imply that the sign of is determined by the sign of the path curvature:
| (35) |
Suppose that . Since , we see that . By Lemma 5, sliding motion along the -equidistant curve is commenced at and maintained while , whereas until (if is large enough) due to (29). However, this is impossible since and . This contradiction proves that . The same argument and the established validity of ii.2) for show that . Since , there exists such that and . If for some , Lemma 5 assures that sliding motion along the -equidistant curve is started at and is not terminated until , in violation of . For any , we thus have . Hence by (4), by (35), and so , in violation of the above inequality . This contradiction proves that .
Now suppose that . Then there is a sequence such that and as ; a proper increase of every gives in addition. By (29), for and so by (4) and by (34). So as decreases from to , the derivative increases while , in violation of the implication for . This contradiction completes the proof.
iii) Were there a sequence such that and as , (4), (34), and (35) imply that as decreases from to for large enough , the inequalities would be preserved, in violation of . It follows that for .
Now assume existence of the sequence such that and as . For large such that , (4)(34) , and increases and so remains positive as grows from until . By (35), time units later the vehicle becomes headed to the target, which is trivially true if . This and (i) of Lemma 5 imply that then the sliding motion along the surface is commenced. It is maintained while . Since and as , this motion occurs for , i.e., iii) does hold.
It remains to examine the case where and so . Suppose first that either or . Then by (32) and at any side of the discontinuity surface by (4). Hence , which yields by (34), in violation of . This contradiction proves that , . Then SMEC and SMT are initially the same, and iii) does hold.
Remark 4.3.
The times of switches between the modes of the discontinuous control law (4) do not accumulate.
To prove this, we first note that the projection of any vehicle position within mode onto is well defined due to (13). Let and be its values at the start and end of the th occurrence of the mode, respectively. By Lemma LABEL:lem.sucs and (vi) of Proposition 3, monotonically sweeps an arc of with the ends during the concluding part of .
Definition 4.4.
The vehicle path or its part is said to be single if the interiors of the involved arcs are pairwise disjoint and in the case of only one arc, do not cover .
Let and be the numbers of the connected components of and , respectively. They are finite due to Corollary 4.2.
Lemma 9.
Any single path accommodates no more than SMT’s.
As was shown in the proof of (v) in of Proposition 3, the number of SMT’s within a common mode does not exceed . SMT between the th and th occurrences of starts at a position where and ends at the position where . Hence any arc , except for the first and last ones, intersects adjacent connected components and of and , respectively, such that the left end-point of is the right end-point of . Hence , and so the total number of the arcs does not exceed , which competes the proof.
Proof of Remark 4.3. Suppose to the contrary that the times when is updated accumulate, i.e., as . At , a SMT is terminated, and so . During the subsequent AM, . At such distances, (19) implies that , where do not depend on the system state. Since IT ends with , this AM lasts no less than time units. Hence as . This and (19) imply that as . So far as IT lasts no less than time units if is reversed during IT, the sign of is the same for and large enough . So the related part of the path is single. By Lemma 9, this part can accommodate only a finite number of SMT’s, in violation of the initial hypothesis. This contradiction completes the proof.
5 Proof of (ii) in Theorem 1
This claim is identical to Remark 4a from the basic paper.
We first alter the control strategy by replacement of the random machinery of choosing the turn direction at switches by a deterministic rule. Then we show that the altered strategy achieves the control objective by making no more than switches, where does not depend on the initial state of the robot. However, this strategy cannot be implemented since it uses unavailable data. The proof is completed by showing that with probability , the initial randomized control law sooner or later gives rise to successive switches identical to those generated by the altered strategy.
5.1 Deterministic Algorithm and its Properties
The symbol stands for the straight line segment directed from to ; is the concatenation of directed curves such that ends at the origin of .
Let an occurrence of mode holds between two modes and let it start at and end at . Due to (6), are attained at unique boundary points and , respectively. They divide into two arcs. Being concatenated with , each of them gives rise to a Jordan curve encircling a bounded domain, one of which is the other united with . The smaller domain is denoted ; it is bounded by and one of the above arcs . Let be the direction (on ) of the walk from to along .
We introduce the control law that is the replica of (4) except for the rule to update when . Now for the first such switch, is set to an arbitrarily pre-specified value. After any subsequent occurrence of this mode,
| (36) |
Proposition 10.
Under the law , the target is reached for a finite time, with making no more than switches , where does not depend on the vehicle initial state.
The next two subsections are devoted to the proof of Proposition 10. In doing so, the idea to retrace the arguments justifying global convergence of the algorithms like the Pledge one [4] that deal with unconstrained motion of an abstract point is troubled by two problems. Firstly, this idea assumes that analysis can be boiled down to study of a point moving according to self-contained rules coherent in nature with the above algorithms. i.e., those like ’move along the boundary’, ’when hitting the boundary, turn left’, etc. However, this is hardly possible, at least in full, since the vehicle behavior essentially depends on its distance from the boundary. For example, depending on this distance at the end of mode , the vehicle afterwards may or may not collide with a forward-horizon cusp of the obstacle. Secondly, the Pledge algorithm and the likes are maze-escaping strategies; they do not find the target inside a labyrinth when started outside it. Novel arguments and techniques are required to justify the success of the proposed algorithm in this situation.
In what follows, we only partly reduce analysis of the vehicle motion to that of a kinematically controlled abstract point. This reduction concerns only special parts of the vehicle path and is not extended on the entire trajectory. The obstacle to be avoided by the point is introduced a posteriori with regard to the distance of the real path from the real obstacle. To justify the convergence of the abstract point to the target, we develop a novel technique based on induction argument.
We start with study of kinematically controlled point.
5.2 The Symbolic Path and its Properties
In this subsection, ’ray’ means ’ray emitted from the target’, and we consider a domain satisfying the following.
Assumption 3.
The boundary consists of finitely many (maybe, zero) straight line segments and the remainder on which the curvature vanishes no more than finitely many times. The domain does not contain the target.
We also consider a point moving in the plane according to the following rules:
-
r.1)
The point moves outside the interior of ;
-
r.2)
Whenever , it moves to in a straight line;
-
r.3)
Whenever hits , it proceeds with monotonic motion along the boundary, counting the angle ;
-
r.4)
This motion lasts until and new SMT is possible, then SMT is commenced;
-
r.5)
The point halts as soon as it arrives at the target.
The possibility from r.4) means that does not obstruct the initial part of SMT. When passing the corner points of , the count of obeys (14) and the conventional rules adopted for turning angles of the tangential vector fields [7], and is assumed to instantaneously, continuously, and monotonically run between the one-sided limit values. The possibility from r.4) may appear within this interval.
To specify the turn direction in r.3), we need some constructions. Let the points lie on a common ray and . One of them, say , is closer to the target than the other. They divide into two arcs. Being concatenated with , each arc gives rise to a Jordan curve encircling a bounded domain. One of these domains is the other united with . The smaller domain is called the cave with the corners . It is bounded by and one of the above arcs .
To complete the rule r.3), we note that any SMT except for the first one starts and ends at some points , which cut out a cave .
-
r.3a)
After the first SMT, the turn is in an arbitrarily pre-specified direction;
-
r.3b)
After SMT that is not the first the point turns
-
–
outside if the cave does not contain the target;
-
–
inside the cave if the cave contains the target.
-
–
Definition 5.1.
The path traced by the point obeying the rules r.1)—r.5), r.3a), r.3b) is called the symbolic path (SP).
Proposition 11.
SP arrives at the target from any initial position. The number of performed SMT’s is upper limited by a constant independent of the initial position.
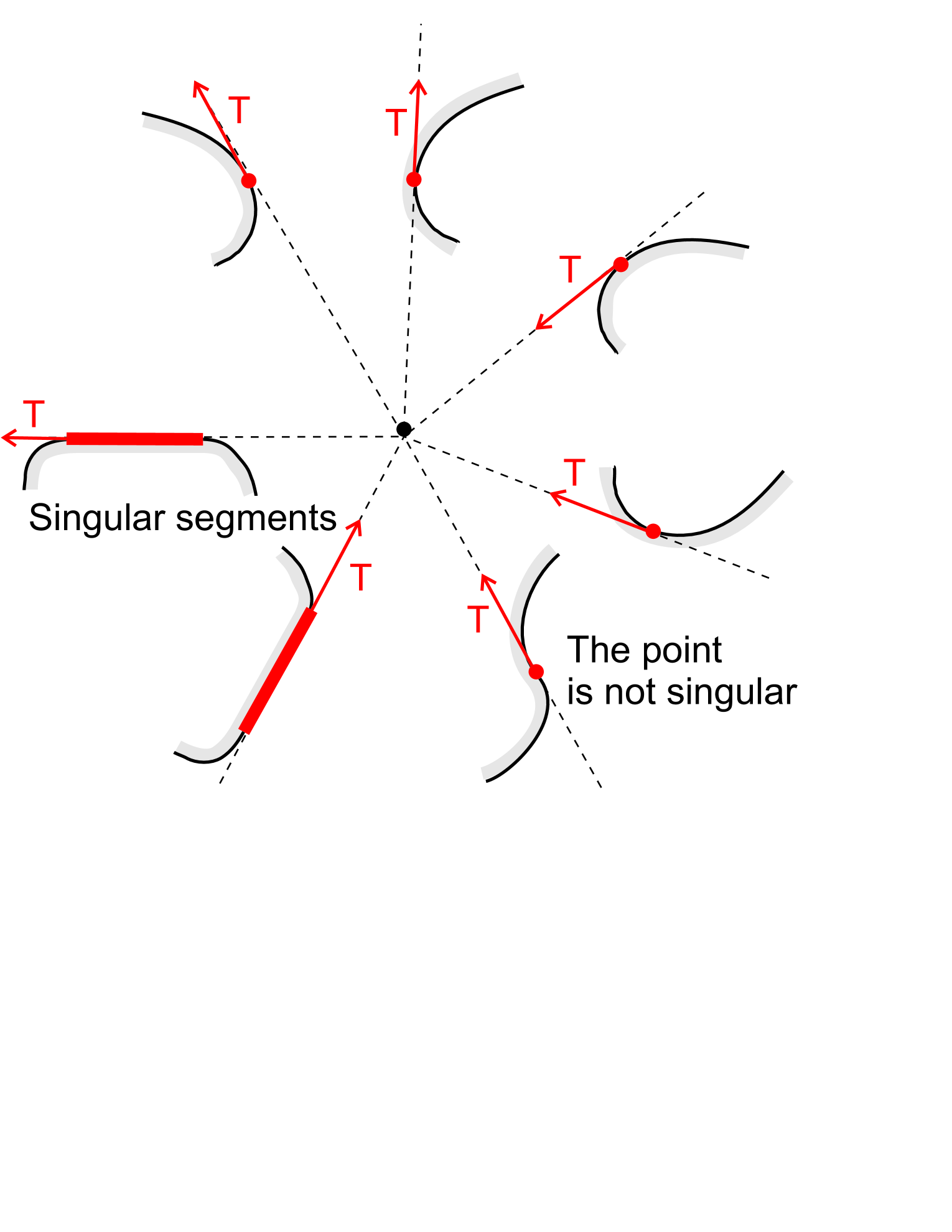
The remainder of the subsection is devoted to the proof of this claim. The notations , , , are attributed to . At the corner points of , these variables except for have one-sided limits and are assumed to instantaneously, continuously, and monotonically run between the one-sided limit values. An arc of is said to be regular if (non-strictly) does not change its sign on this arc, depending on which the arc is said to be positive/negative (or arc). The regular arc is maximal if it cannot be extended without violation of the regularity. A connected part of and its points are said to be singular if strictly changes the sign when passing it and, if this part contains more than one point, is identically zero on it; see Fig. 2(c). The singular arc is a segment of a straight line since on it due to (13). The ends of any maximal regular arc are singular. Due to Assumption 3 and (13), the boundary has only finitely many singular parts. A boundary point is said to lie above if there exists such that and . If conversely and , the point is said to lie below .
Observation 2.
As moves in direction over a -arc () of , we have . Any point of arc that is not singular lies above/below .
Lemma 12.
As continuously moves along a regular arc, evolves within an interval of the form , where is an integer. When reaches a singular point, arrives at the end of associated with the even or odd integer, depending on whether moves towards or outwards the target at this moment, respectively.
Since does not change its sign, the vector does not trespass the -axis, whereas is the polar angle of this vector. This gives rise to the first claim of the lemma. The second one is immediate from the first claim.
Lemma 13.
Whenever SP progresses along in direction , we have .
This is evidently true just after any SMT. During the subsequent motion along , the inequality can be violated only at a position where and either is a corner singular point or since by the third relation from (13). However, at such position, motion along is ended.
The cave is said to be positive/negative (or cave) if the trip from to over is in the respective direction of . By Observation 2, moves from a arc to a arc in this trip and so passes a singular part of . The total number of such parts inside is called the degree of the cave.¶¶¶Possible singular parts at the ends of are not counted.
Lemma 14.
For any cave of degree , the arc consists of the positive and negative sub-arcs and a singular part . For , the tangential vector (that is co-linear with if is the corner point) is directed outwards if the cave is positive and does not contain or negative and contains . Otherwise, this vector is directed towards .
The first claim is evident. Let the cave be positive and . Suppose that is directed towards . Then the same is true for . Hence and since otherwise, by (13), in violation of the definition of the singular part. In any case, for some . Since , the segment intersects , cutting out a smaller cave inside . The singular part inside is the second such part in the original cave, in violation of . This contradiction shows that is directed outwards .
Now suppose that and is directed outwards . Let a point moves in the positive direction along . The ray containing monotonically rotates by Observation 2 and contains a continuously moving point . As runs from to , the segment sweeps the entire cave , and so this cave does not contain , in violation of the assumption. This contradiction proves that is directed towards .
The second claim for negative caves and the third claim are established likewise.
Lemma 15.
If SP enters a cave without the target, it leaves the cave through the other corner with . In this maneuver, the direction of motion along is not changed, no point of is passed twice, and the number of SMT’s does not exceed the cave degree.
Let SP enter the cave in the positive direction; the case of the negative direction is considered likewise. The proof will be by induction on the cave degree .
Let . (i) Suppose first that the cave is positive and so enters it through moving over a arc. By Lemma 14, the point moves outwards the target whenever , and so by Lemmas 12 and 13. As moves over the subsequent arc, becomes negative and so the inequality is kept true by Lemma 12. Thus leaves the cave through with , having made no SMT.
(ii) Let the cave be negative. Then enters it through moving over the negative arc. By Lemma 14, the point moves towards the target whenever . Since , Lemma 13 yields . By Lemma 12, until and so at by Lemma 14. When passes the entire , the sign of reverses from to and so just after the passage of . It remains to note that while moves over the arc from to by Lemma 12.
Suppose that the claim of the lemma is true for any cave with degree , and consider a cave of degree . Let this cave be positive. Then enters it through the lower corner along a positive arc. We also consider the accompanying motion of the ray containing . This ray contains a continuously moving point that starts at . This motion is considered until a singular part of appears on the ray segment for the first time. Three cases are possible at this position.
(a) The singular part ; see Fig. 3(a), where .
By successively applying the induction hypothesis to and , we see that SP arrives at in the positive direction and with . While moves from to over the arc, the vector is below the -axis and so by Lemma 12.
(b) The singular point ; see Fig. 3(b), where . By successively applying the induction hypothesis to and , we see that SP arrives at in the positive direction and with . So and SP proceeds along the arc to with by Lemma 12, which completes the proof.
(c) The singular point ; see Fig. 3(c). If at this point, SP enters the cave of degree and by the induction hypothesis, arrives at moving in the positive direction and with . If conversely , SP undergoes SMT, which cannot be terminated at the target since it does not belong to the cave at hand. So it is terminated at some point . Since does not lie in the sub-cave of the original cave, the vehicle turns right at and thus proceeds along in the positive direction. By applying the induction hypothesis to , we see that SP arrives at moving in the positive direction and with in any case. The proof is completed like in the cases (a) and (b).
The case where the cave is negative is considered likewise.
Lemma 16.
Suppose that after SMT starting and ending at the points and , respectively, the direction of the motion along is reversed. Then the cave does not contain but contains the entire path traced before SMT at hand.
Let the motion direction at be ; the case of is considered likewise. Since on arrival at , the left turn is made, does not contain by r.3b). Suppose that the path traced before SMT at hand is not contained by this cave, i.e., the point enters this cave before. Since this cannot be done during another SMT, the point enters the cave through either or . In the first case, is passed twice in the opposite directions, in violation of Lemma 15. In the second case, is passed with by the same lemma and so SMT cannot be commenced. The contradiction obtained proves that the initial part of SP is inside the cave.
Lemma 17.
If SP progresses along in a cave not containing the target, it leaves this cave through one of its corners. During this maneuver, SP passes no point of twice and makes no more SMT’s than the degree of the cave.
For the definiteness, let the cave be positive; the case of the negative cave is considered likewise. The proof will be by induction on the degree of the cave.
Let . We employ the notations from Lemma 14.
() The motion is started on in the direction . The claim is evident.
() The motion is started on in the direction . Then the point necessarily arrives at , moving in the negative direction. Thus the situation is reduced to ().
() The motion is started on in the positive direction. The claim of the lemma is justified by the concluding arguments from (i) in the proof of Lemma 15.
() The motion is started on in the direction . Then the point necessarily arrives at , moving in the positive direction. Thus the situation is reduced to ().
Now suppose that the claim of the lemma is true for any cave with degree , and consider a cave of degree . Let this cave be positive for the definiteness; the case of the negative cave is considered likewise. We also consider an auxiliary motion of the point over from into the cave and the accompanying motion of the ray containing until one of the situations from Fig. 3 occurs.
Case (a) from Fig. 3. (a.1) If the motion is started on in direction or on in direction , the claim of the lemma is justified by the concluding arguments from (i) in the proof of Lemma 15.
(a.2) If the motion is started on , the induction hypothesis applied to the cave of degree ensures that the point arrives at either or . In the first case, it arrives in direction , thus reducing the situation to (a.1). In the second case, it arrives in direction . If at this position, the point enters the cave in direction and afterwards leaves it through in the same direction by Lemma 15. If , SMT is commenced, which ends at the position with the left turn since does not contain . Hence in any case, the motion proceeds in direction from the position , which reduces the situation to (a.1).
(a.3) The case where the motion is started on , is considered likewise.
(a.4) The cases where the motion starts on in direction or on in direction , are trivially reduced to (a.2) and (a.3), respectively.
Case (b) from Fig. 3. (b.1) The cases where the motion starts on in direction or on in direction , is considered like (a.1).
(b.2) If the start is on , the induction hypothesis applied to ensures that the point arrives at either or . In the first case, it arrives in direction , thus reducing the situation to (b.1). In the second case, it arrives in direction and then enters the cave . By Lemma 15, the point leaves this cave through in direction and with , thus reducing the situation to (b.1).
(b.3) If the motion commences on , the induction hypothesis applied to the cave of degree ensures that the point arrives at either or . In the first case, the arrival is in direction , after which the situation is reduced to (b.2). In the second case, the arrival is in direction . If at this moment, the motion proceeds along in direction , and the situation is reduced to (b.1). If , SMT is commenced, which ends at the position with the left turn since the cave does not contain the target. Hence the motion proceeds along in direction , and the situation is still reduced to (b.1).
(b.4) The cases where the motion starts on in direction or on in direction , are trivially reduced to (b.3) and (b.2), respectively.
Case (c) from Fig. 3. (c.1) The cases where the motion starts on in direction or on in direction , is considered like (a.1).
(c.2) If the start is on , the induction hypothesis applied to yields that the point arrives at either or . In the first case, the arrival direction is and the situation is reduced to (b.1). In the second case, the point arrives in direction and then enters . By Lemma 15, the point leaves this cave through in direction and with . Thus we arrive at (b.1) once more.
(c.3) If the motion commences on , the induction hypothesis applied to the cave of degree ensures that the point arrives at either or . In the first case, the arrival is in direction , after which the situation is reduced to (b.2). In the second case, the arrival is in direction , after which the situation reduces to (b.1).
(c.4) The cases where the motion starts on in direction or on in direction , are trivially reduced to (c.2) and (c.3), respectively.
Lemma 18.
Any part of SP where it progresses over the boundary ends with SMT.
is by retracing the proof of (v) in Proposition 3.
Let be the number of singular parts of the boundary .
Lemma 19.
If every cave examined in r.3b) does not contain the target, SP consists of the initial and terminal sub-paths (some of which may contain only one point) such that each accommodates no more than SMT’s, no point of is passed twice within , whereas the direction of motion along is not altered within .
Suppose first that the initial position lies in some cave. Among such caves, there is one enveloping the others. By Lemma 17, SP leaves this cave and the related sub-path satisfies the properties stated in Lemma 19. If the initial position lies outside any cave, this sub-path is taken to consist of only this position. By Lemma 16, the direction of the motion along is not changed on the remaining sub-path and does not go inside the above maximal cave.
Suppose that within , SP accommodates more than SMT’s. Any of them starts at some singular part with . Hence SP passes some singular point with at least twice and thus becomes cyclic. Now we consider the related minimal cyclic part CP of SP that starts and ends with commencing a SMT at a common point. Due to the constant direction, the closed curve CP is simple. It follows that , whereas since for all bypassed caves and . Hence by (14), whereas CP starts and ends with and so . This contradiction completes the proof.
Corollary 5.2.
If every cave examined in r.3b) does not contain , SP arrives at by making no more than SMT’s.
Lemma 20.
If SP enters a cave containing over a positive arc with , it arrives at not leaving the cave. During this maneuver, no point of is passed twice and the number of SMT’s does not exceed the degree of the cave.
Let the cave be entered in direction ; the case of is considered likewise. The proof will be by induction on the degree of the cave . Since enters the cave over a positive arc, the entrance is through .
Let . By Lemma 14, moves towards when reaching the singular part of the cave . At this position, by Lemma 12 and does not obstruct the initial part of SMT, as was show in the proof of Lemma 14. So SMT is commenced. If it is not terminated at , the segment intersects , cutting out a smaller cave within the original one. The singular part inside this new cave is the second such part within the original cave, in violation of . Hence is reached and only one switch is made.
Now suppose that the conclusion of the lemma is true for any cave with degree , and consider a cave of degree . Like in the proof of Lemma 15, we consider the motion of the ray containing until a singular point appears on the segment for the first time, and examine separately three possible cases depicted in Fig. 3.
(a) The singular point ; see Fig. 3(a). The target is contained by the cave of degree , which is entered in the positive direction and by Lemma 12, with . The induction hypothesis competes the proof.
(b) The singular point ; see Fig. 3(b). The target is evidently contained by the cave of degree . The proof is completed like in the previous case.
(c) The singular point ; see Fig. 3(c). If at , the point moves outwards , the arguments from the second paragraph in the proof of Lemma 14 show that the cave does not contain , in violation of the assumption of the lemma. Hence at , the point moves towards and so by Lemma 12 and does not obstruct the initial part of SMT, as was show in the proof of Lemma 14. Thus SMT is commenced at . If it is terminated at , the proof is completed. Otherwise, it arrives at , as is shown in Fig. 3(c). Evidently, the cave does not contain the target. So on reaching , the point turns right and continues moving in the positive direction over a new positive arc and with . So the proof is completed by applying the induction hypothesis to the cave of degree .
5.3 Proof of Proposition 10.
Let stand for the directed path traced by the vehicle under the control law from Subsect. 5.1. We first show that after a slight modification, this path can be viewed as SP for some domain provided that is single (see Definition 4.4). This permits us to employ the results of Subsect. 5.2.
We use the notations from introduced before Definition 4.4, note that for , the distance from the vehicle to the obstacle is a function of , and put:
| (37) |
If at the start of the th mode , the abscissa is passed twice during IT by Lemma LABEL:lem.sucs. For every such , the real path between these two passages is replaced by the motion along the straight line segment, which gives rise to the modified path .
Observation 3.
Let the original path be single. The modified path is SP for .
Indeed, this path can be viewed as a trace of a point obeying the rules r.1)—r.5). To ensure r.3a), the direction should be pre-specified to match that of . The property r3.b) is satisfied due to (36) and the second inequality from (7).
Lemma 21.
The last claim in Assumption 3 holds by (7), (37). The boundary consists of parts traced during 1) SMT’s, 2) SMEC’s, 3) arcs of circles traced during IT’s, and 4) segments of normals to resulted from the path modification.
Any part 1) clearly satisfies Assumption 3 and is either singular or does not contain singular points; their number does not exceed by Lemma 9.
Since parts 2) are separated by SMT’s, their number does not exceed . Any part 2) lies on a -equidistant curve with . Due to (8), , Assumption 3 holds since the boundary is piece-wise analytical, and the singular parts of are the connected components of the set from Corollary 4.2. So type 2) arcs of accommodate no more than singular parts.
It remains to note that parts 3) and 4) do not contain singular points since monotonically evolves from during IT’s.
Lemma 22.
If the vehicle finds the target in after some occurrence of mode , it arrives at the target by making after this no more than switches .
Let us consider a part of the path that starts in mode preceding . Suppose first that this part is not single and truncate it from the right, leaving its maximal single sub-part . The terminal position of lies on a previously passed piece of . Let and be the related domain (37) and modified path. Associated with is a cave of into which turns with . By Lemma 20, cannot arrive at a previously passed point, in violation of the above property. This contradiction proves that the entire path is single. Then Lemmas 20 and 21 guarantee that arrives at by making no more than SMT’s. It remains to note that and arrive at only simultaneously, and each occurrence of gives rise to a SMT in .
Lemma 23.
After no more than switches , the direction in which moves along within modes is not altered.
Consider an occurrence of mode after which the direction is altered and the path from the start of the entire motion until the end of . Suppose that is not single and truncate it from the left, leaving the maximal single part . The starting point of is passed once more within , both times in mode . So this double point is inherited by , where and are the related domain (37) and modified path. Associated with is a cave of ; these two sets contain the target only simultaneously due to (7). Hence and acquire a common turn direction at their ends. So SP has converse directions of motion along the boundary at the start and end of the last involved SMT and by Lemmas 16 and 17, has no double points. This contradiction proves that the entire is single. Due to Lemma 16, the modified path lies in and so involves no more than SMT’s thanks to Lemmas 17 and 21. It remains to note that each occurrence of gives rise to a SMT in .
To prove Proposition 10, it in fact remains to show that the vehicle cannot pass more than modes in a row, constantly not finding the target in and not changing the direction of the motion along . The next lemma with corollaries serves this proof. The symbol stands for the angle from the vector to . Let the points on be at the distance and such that when traveling between them, the path does not intersect itself and except for , has no points in common with the normals , where . The points split into two curves. Being concatenated with the above normals and , they give rise to Jordan loops, with one of them enveloping the other. Let be the curve giving rise to the inner loop LOOP, and be the direction from to along .
Lemma 24.
If LOOP does not encircle the target, the following relation holds
| (38) |
Let ; is considered likewise. By applying the Hopf’s theorem to LOOP, we see that
The proof is completed by the second formula in (14).
The next claim employs the notations introduced at the beginning of Subsect. 5.1.
Corollary 5.3.
Suppose that and the value of maintained during the occurrence of mode is not altered when . Then (38) holds with .
This is true since in this claim and Lemma 24, is the same.
Corollary 5.4.
Let and be successively passed within a common mode , where . If is passed after IT, (38) holds, where accounts for the entire motion of the projection , including possible full runs over .
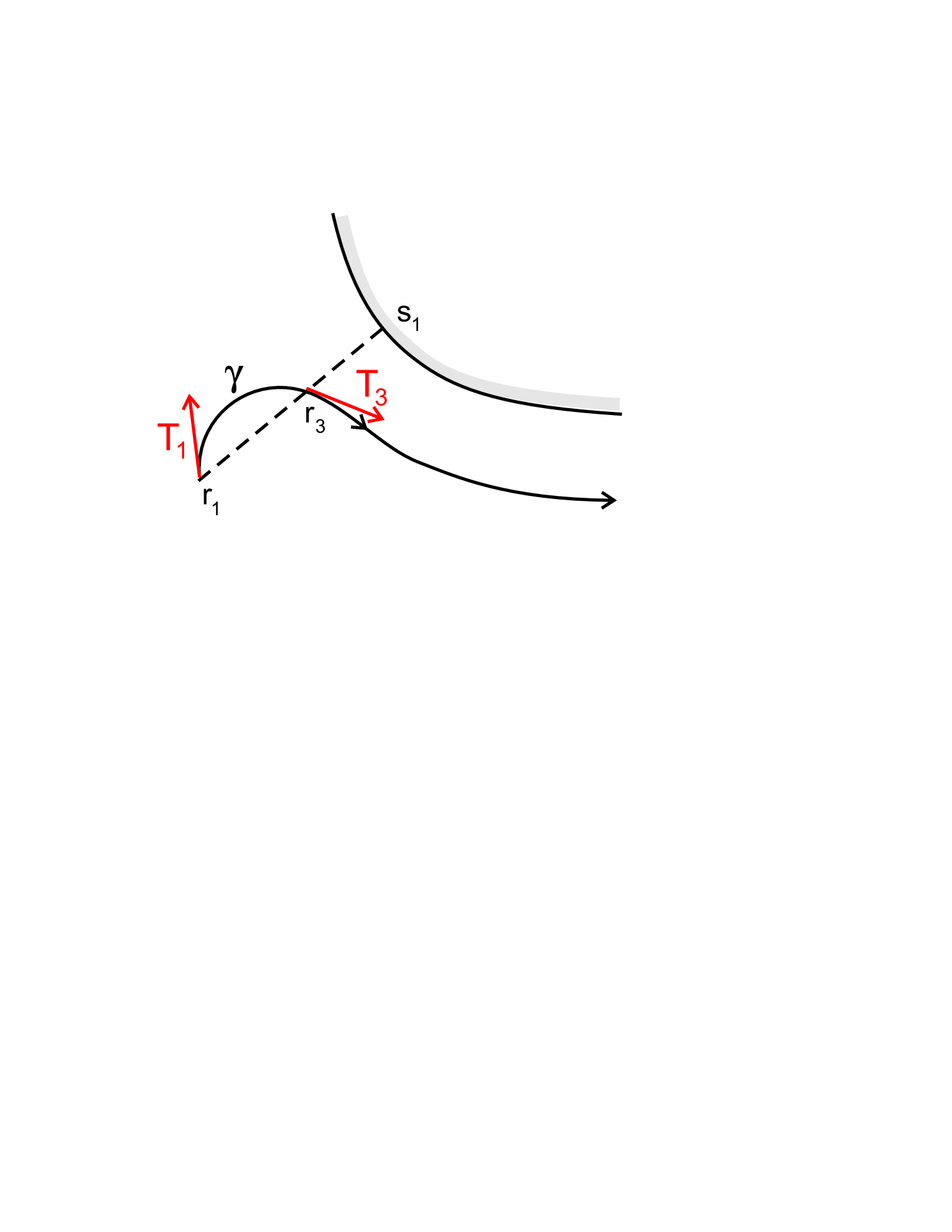
If 1) does not run over the entire and 2) either is passed after IT or at the start of the mode, the claim is evident. If 1) holds but 2) does not, the path may intersect and so direct application of Lemma 24 is impossible. Then we apply this lemma to , where is the point where the vehicle intersects the normal for the second time during IT; see Fig. 4. The proof is completed by noting that and so , as well as that . The claim is generalized on the case where 1) is not true by proper partition of the path, followed by summation of the formulas related to the resultant pieces.
Corollary 5.5.
Let points and be successively passed in modes (maybe, different). Suppose that is not attributed to IT and when traveling from to , the vehicle constantly does not find the target in and does not change . Then (38) holds, where accounts for the entire motion of the projection , including possible full runs over .
It is assumed that as the vehicle moves in mode , the projection continuously and monotonically goes over from to in the direction .
Lemma 25.
The vehicle cannot pass more than modes in a row, constantly not finding the target in and not changing the direction of the motion along .
Suppose the contrary and that ; the case is considered likewise. By Observation 1, the th mode in the row starts when lies in an exit arc , whereas when it ends. Hence cannot repeat until completes the full run over . However, they do repeat since the number of arcs does not exceed by Observation 1, and by construction from the proof of Lemma 21. Hence the path can be truncated so that the first and last modes start at positions and , respectively, lying on a common exit arc , whereas encircles the entire boundary during the move over the truncated . By the definition of the arc, evolves within the fourth quadrant as runs from to within the arc and so the absolute value of its turning angle does not exceed . This and (17) (where ) imply that . In (38), and since the segments and are perpendicular. Overall, (38) implies that
| (39) |
The path starts with and whenever is encountered, the angle may stay constant during SMT but after this SMT becomes positive by (16) (see Fig. 2(b)) since the robot turns right. The last claim holds thanks to (iii) of Proposition 3 if is not terminated during this SMT and (36) otherwise. Such behavior of is inconsistent with (39). The contradiction obtained completes the proof.
5.4 Proof of (ii) in Theorem 1.
Let be the probability that the vehicle does not arrive at after making switches , where is taken from Proposition 10. Given a realization of ’s for the first switches, the probability of the th event does not exceed the probability that the next realizations are not identical to those generated by the algorithm for the related initial state. Here , where and is the probability of picking in (4). So the law of total probability yields that as . It remains to note that the probability not to achieve does not exceed for any .
6 Proof of (ii) in Theorem 1 and Theorem 2
For the definiteness, we consider the vehicle driven by the basic algorithm with the right turns. So in any SMEC the vehicle has the obstacle to the left. The proof basically follows that from the previous section and employs many facts established there. The difference is that now we do not need to introduce an auxiliary deterministic algorithm since the examined one is deterministic itself.
As before, we first consider another obstacle satisfying Assumption 3. Let a point moves in the plane according to the following rules:
-
r.1)
If , moves to in a straight line; ;
-
r.2)
If hits , it turns right and then moves in the positive direction along the boundary, counting the angle ;
-
r.3)
This motion lasts until and new SMT is possible;
-
r.4)
The point halts as soon as it arrives at the target.
The path traced by is called the symbolic path (SP). Any SMT according to r.1) except for the first one starts and ends at some points , which cut out a cave .
We start with noting that the following specification of Observation 2 now holds.
Observation 4.
As moves over a -arc of , we have . Non-singular points of -arc lie above/below .
Lemma 26.
Whenever SP lies on , we have .
It is easy to see by inspection that Lemma 15 remains true as well, where in the case from Fig. 3 the right turn at the point is justified by not the absence of the target in the cave but the very algorithm statement. The following claim is analog of Lemma 16
Lemma 27.
Suppose that after SMT starting and ending at the points and , respectively, SP enters the cave . The this cave contains the entire path traced before SMT at hand.
The proof is be retracing the arguments from the proof of Lemma 16 with the only alteration: the point cannot enter the cave through since this violates the always positive direction of motion along the boundary.
Now we revert to the vehicle at hand and show that Lemma 27 extends on the directed path traced by this vehicle. The next lemma employs the notations and introduced at the beginning of subsection 5.1.
Lemma 8.
a For any occurrence of mode that holds between two modes , we have .
Suppose to the contrary that . Then according to the ’only-right-turns’ option of the algorithm, the vehicle enters the cave after termination of . We are going to show that then similar to Lemma 16, this cave contains the entire path passed by the vehicle until this moment and so its initial location. Due to the first relation from (7), the last claim implies that the initial location is also contained by a cave of , in violation of the assumptions of Theorem 2. This contradiction will complete the proof.
Thus it remains to show that does contain the path traced so far. Suppose the contrary. Since in the mode preceding , the vehicle has the obstacle to the left, it passes to from inside the cave. It follows that the moment after is not the first time when the vehicle enters the cave. Let us consider the last of these ’preceding’ enters and the path traced by the vehicle since this moment until the commencement of . By combining Lemma 15 with the arguments from the proof of Lemma 22, we conclude that this path is single and at its end, which makes mode impossible. The contradiction obtained completes the proof.
Corollary 6.1.
For , (38) holds with .
Corollary 6.2.
Let be successively passed within a common mode . If follows IT, (38) holds with and accounting for possible full runs over .
Corollary 6.3.
Suppose that points and are successively passed in modes (maybe, different) and is not attributed to IT. Then (38) holds with , where accounts for the entire motion of the projection , including possible full runs over .
We also note that at the moment when a SMEC ends, . Since the boundary is piece-wise analytical, this set has finitely many connected components (called exit arcs).
PROOF OF THEOREM 2 This proof retraces many arguments from the proof of Lemma 25. Suppose the contrary and that the vehicle does not arrive at the target. Then the projection repeatedly encircles the boundary. (This includes the imaginary moves of when the vehicle is in mode .) By retracing the arguments from the proof of (v) in Proposition 3, we conclude that the path can be truncated so that the first and last modes start at positions and , respectively, lying on a common exit arc , whereas encircles the entire boundary during the move over the truncated . By the definition of the exit arc, evolves within the fourth quadrant as runs from to within the arc and so the absolute value of its turning angle does not exceed . This and (17) (where ) imply that . In (38), and since the segments and are perpendicular. Overall, (38) implies (39). The path starts with and whenever is encountered, the angle may stay constant during SMT but after this SMT becomes positive since the robot turns right. The last claim holds thanks to (iii) of Proposition 3 if is not terminated during this SMT and the right-turn option in (4) otherwise. Such behavior of is inconsistent with (39). The contradiction obtained completes the proof.
References
- [1] D. Thompson, On Growth and Form, Cambridge University Press, Cambridge, 1966.
- [2] J. Camhi, E. Johnson, High-frequency steering maneuvers mediated by tactile cues: Antennal wall-following in the cockroach, The Journal of Experimental Biology 202 (1999) 631 643.
- [3] B. Fajen, Steering toward a goal by equalizing taus, Journal of Experimental Psychology: Human Perception and Performance 27 (4) (2001) 953–968.
- [4] H. Abelson, A. A. diSessa, Turtle Geometry, MIT Press, Cambridge, 1980.
- [5] V. Lumelsky, S. Tiwari, An algorithm for maze searching with azimuth input, in: Proceedings of the IEEE Conference on Robotics and Automation, San Diego, CA, 1991, pp. 111 –116.
- [6] V. I. Utkin, Sliding Modes in Control Optimization, Springer-Verlag, Berlin, 1992.
- [7] E. Kreiszig, Differential Geometry, Dover Publications, Inc., NY, 1991.
- [8] A. Matveev, M. Hoy, A. Savkin, Mixed nonlinear-sliding mode control of an unmanned farm tractor in the presence of sliding, in: Proceedings of the 11th International Conference on Control, Automation, Robotics and Vision, Singapore, 2010, pp. 927–932.