Quasimorphisms on surfaces and continuity in the Hofer norm
Abstract.
There is a number of known constructions of quasimorphisms on Hamiltonian groups. We show that on surfaces many of these quasimorphisms are not compatible with the Hofer norm in a sense they are not continuous and not Lipschitz. The only exception known to the author is the Calabi quasimorphism on a sphere [EP] and the induced quasimorphisms on genus-zero surfaces (e.g. [BEP]).
1. Introduction and results
Let be a symplectic manifold. The Hamiltonian group of admits Hofer’s metric which, roughly speaking, measures mechanical energy needed to deform one Hamiltonian into another. This metric has many nice properties - it is bi-invariant and on closed manifolds the induced geometry is a natural one: any other bi-invariant -continuous Finsler metric is equivalent to Hofer’s ( [BO]). However until now the large scale geometry not well understood as there is a very limited set of tools available to estimate distances. It is particularly difficult to produce lower bounds.
Ideally, one would like to construct an invariant that estimates the distance and at the same time respects the group structure - namely, a homomorphism. In the case when the symplectic form is exact the Calabi homomorphism is such a tool as it is 1-Lipschitz with respect to the metric. However, by a well known result [Ban], is either simple (when is closed) or it contains a simple subgroup of codimension 1, therefore all homomorphisms factor through Calabi. As an attempt to relax the constraints one may consider quasimorphisms: maps which are additive up to a bounded defect. When one is interested in coarse estimates of geometry, the defect does not play a significant role. There is a number of known constructions of quasimorphisms for various manifolds and the main question is whether they can be utilized to extract geometric information. For example, the Calabi quasimorphism on and certain other manifolds ( [EP]) arises as a Floer-theoretic spectral invariant and is naturally Lipschitz with respect to the Hofer metric. There is a series of other constructions that consider topological invariants of orbits of a Hamiltonian flow. Some of these quasimorphisms can be seen as generalizations of the Calabi homomorphism so there was a hope they may inherit metric properties. Unfortunately, this is not the case and all constructions known to the author except for the Calabi quasimorphisms and the induced ones are not Lipschitz with respect to Hofer’s metric. In this article we review two families of quasimorphisms on surfaces constructed by Polterovich and Gambaudo-Ghys and show that they are neither Lipschitz nor continuous in the Hofer metric. Some results can be generalized to symplectic manifolds of higher dimension.
The situation is different when one considers some other (not bi-invariant) metrics on . For example, the quasimorphisms mentioned above are continuous in the norm (see [BS3, BS1, BS2]).
Acknowledgements: The author is grateful to L. Buhovski, L. Polterovich and E. Shelukhin for useful discussions and comments.
2. Preliminaries
Let be a symplectic manifold, a Hamiltonian diffeomorphism with compact support in . The Hofer norm (see [Hof]) is defined by
where the infimum goes over all compactly supported Hamiltonian functions such that is the time-1 map of the induced flow. The Hofer metric is given by
Let be a group. A function is called a quasimorphism if there exists a constant (called the defect of ) such that for all . The quasimorphism is called homogeneous if it satisfies for all and . Any homogeneous quasimorphism satisfies for commuting elements . Every quasimorphism is equivalent (up to a bounded deformation) to a unique homogeneous one [Cal]. A quasimorphism is called genuine if it is not a homomorphism.
Lemma 1.
Let be a Lie group equipped with a bi-invariant path metric, a homogeneous quasimorphism. Then is Lipschitz if and only if it is continuous at the identity.
Proof.
The fact that Lipschitz property implies continuity is obvious. We show the opposite direction. Suppose is continuous at the identity, namely, given , there exists such that any with satisfies . Fix an and select an appropriate .
The Lipschitz property holds on a large scale: let with arbitrary and . By the triangle inequality,
where denotes the defect of .
Pick a path connecting to the identity with . The path can be cut into arcs of length at most , hence can be presented as a composition of elements in the -neighborhood of the identity. Therefore
Finally,
and the property holds since by bi-invariance of the metric.
We show that the Lipschitz property holds also locally: pick with arbitrary and in the -neighborhood of the identity. Denote
Then by homogenuity and the triangle inequality
By bi-invariance and the triangle inequality implies
Therefore using our choice of ,
Combining the results above, is globally Lipschitz. ∎
Therefore a non-Lipschitz quasimorphism is also non-continuous. (With some extra effort one may show it is nowhere continuous.) In what follows we will concentrate only on the Lipschitz property.
3. Calabi quasimorphisms
Let , be a time-dependent smooth function with compact support. Define
When is exact on , descends to a homomorphism which is called the Calabi homomorphism. For any , by its definition.
Equip the unit sphere with a symplectic form normalized by . [EP] presents construction of a homogeneous quasimorphism based on a Floer-theoretical spectral invariant of . Being a spectral invariant, it is Lipschitz with respect to the Hofer norm.
A symplectic embedding of a genus zero surface into a sphere induces the pullback quasimorphism on . In [BEP] the authors show that this construction provides continuum of linearly independent quasimorphisms, all Lipschitz in the Hofer norm. These quasimorphisms provide useful tools to analyze the Hofer geometry of . For example, existence of such quasimorphisms allows to construct quasi-isometric embeddings of “large” sets into (see [EP]) or into spaces of Hamiltonian-isotopic Lagrangian submanifolds of (e.g. [Kha, Sey]).
These quasimorphisms can be seen as generalizations of the Calabi homomorphism as they coincide with the Calabi invariant given a Hamiltonian isotopy which is supported in a displaceable subset. There was a hope that other quasimorphisms (some of them can also be seen as certain generalizations of Calabi) may share geometric properties with the Calabi homomorphism, for example, turn to be Lipschitz. Unfortunately, it is not the case. We analyze two constructions of quasimorphisms in the sections below.
4. Polterovich construction
4.1. The quasimorphisms
Let be a symplectic manifold with non-abelian fundamental group. We equip it with an auxiliary Riemannian metric and pick a basepoint . Given a non-trivial homogeneous quasimorphism one constructs a quasimorphism as follows. For each choose a short geodesic path which connects to . Given a Hamiltonian isotopy between and , for each denote by the closed loop defined by concatenation of geodesic paths with the trajectory of under . Let
where is the equivalence class of . is a quasimorphism and its homogenization
does not depend on the choices of metric, , geodesic paths or , resulting in a homogeneous quasimorphism . For more details see [Pol].
4.2. Noncontinuity
We start with a simple example which will be extended to the general case later. Let be a closed surface of genus two equipped with a symplectic form . Denote by the standard generators of and pick a quasimorphism such that (for example, a word counting quasimorphism). Let be the quasimorphism induced by . Denote by a pair of pants whose boundary components represent the free homotopy classes of .
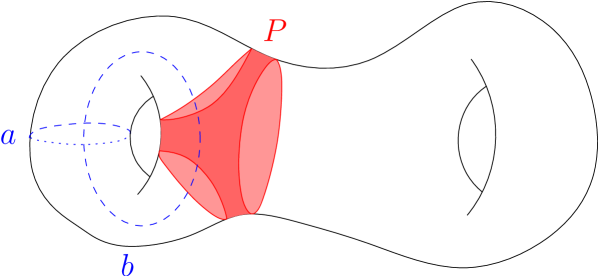
We construct a Hamiltonian from the indicator function of which is cut off near the boundary. Note that the flow generated by is controlled by the cutoff and is supported in a tubular neighborhood of the boundary . For a reasonable choice of the cutoff (when the level sets have exactly one connected component near each connected component of ) support of the flow consists of three strips around . These strips are foliated by periodic trajectories in the free homotopy classes of . The classes do not affect the value of and contribution comes only from trajectories in the class . A simple computation shows that and it is independent of the cutoff. (Intuitively, when one applies a steeper cutoff, velocity of the flow increases linearly with the slope and inversely proportional to its area of support, so faster rotation is compensated by the reduced volume of motion.)
We adjust the cutoff so that nearly all non-stationary points near have a fixed rational period. Pick an area preserving parametrization with coordinates near each connected component of (in our notation ). Suppose that is defined in these coordinates by . Pick a natural number and a smoothing parameter , define the cutoff function by
and interpolate it smoothly in the intervals . Let . As the result, all points in the annulus have rational period and the remaining non-stationary points in are contained in a region of area and have controlled dynamics in a sense that their period is at least . Note that the smoothing parameter can be chosen arbitrarily small and can be reduced independently of and . Such adjustment of does not increase the maximal velocity of the flow.
Step I: Given consider a pair of pants as above with . We place deformed copies of (where the deformations are symplectic near and isotopic to the identity) in a way so that no triple intersections of occur.
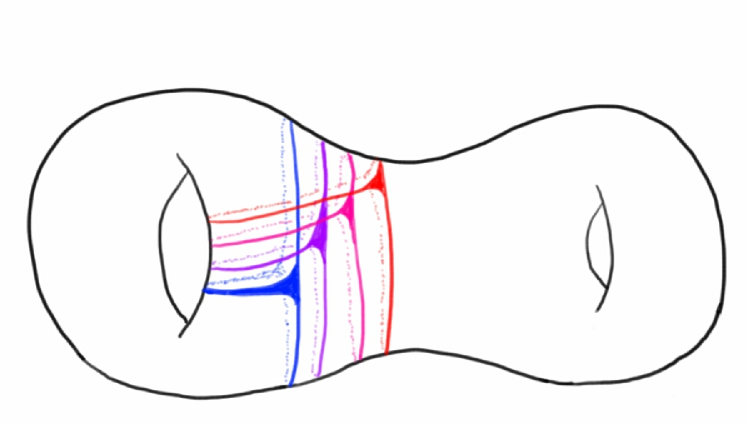
Pick a Hamiltonian function supported in as described above. The cutoff of is adjusted in a way that most (up to a region of area ) non-stationary points have the same period for some . Denote the resulting Hamiltonian by and let be the deformations of supported in each defined by . Let denote their Hamiltonian flows.
Step II: Pick a system of disjoint open neighborhoods such that . For let . We assume that in each connected component of there is enough “empty space” not occupied by and : . Otherwise we may either repeat the construction applying the same deformations to a narrower pair of pants or deform the symplectic form in the complement of the union of all pairs of pants and redistribute area to satisfy this condition.
Let be the minimal time required for any of the flows to travel between two neighborhoods and . Namely, given , for all and all . Pick a natural such that .
Step III: We make a series of adjustments to this construction. The goal is to ensure that most points are -periodic while the rest (that are beyond our direct control) will not travel too far, hence their contribution to the quasimorphism will be small.
First of all, we modify the smoothing parameter that appears in the construction of . Fix an auxiliary Riemannian metric on . Let be the maximal point velocity of the flows and be the maximal diameter of connected components of the neighborhoods . Let
be a set of homotopy classes of short loops and be the maximal value of the quasimorphism restricted to . (Short loops represent a finite number of homotopy classes so the maximum is attained.) We pick
where is the defect of . and the deformed flows are adjusted according to this value of the smoothing parameter . Note that this modification does not increase the maximal velocity of the flow. Hence is still less than the travel time between different neighborhoods .
Furthermore, perturb inside the neighborhoods so that
We apply the same perturbations to the Hamiltonian functions and the flows . This modification does not affect dynamics of the flows outside the neighborhoods , hence the minimal travel time between neighborhoods is still greater than . Moreover, the modified flows may have increased velocities locally inside , but on a larger scale (time and above) they travel approximately the same distance.
Let be the composition of the time- maps of the flows. We claim that for ,
while the Hofer norm is bounded by . Taking , we deduce that is not Lipschitz.
By the composition formula, the flow is generated by the time-dependent Hamiltonian
Namely, the pairs of pants which support the Hamiltonian functions are deformed and “dragged” along the flows. For time supports of the summands cannot have triple intersections: that happens only after some is dragged by to a point where it intersects some (possibly deformed) . That means that certain points have arrived in (or passed through) other neighborhood and that cannot happen before . As each summand admits values in the interval , for all and the bound on the Hofer norm follows.
We estimate the value of the quasimorphism . Intuitively speaking, the time- maps “almost commute” (commute in the complement of a subset of area ), hence their contribution to the quasimorphism “almost adds up” (up to a defect which is small compared to the values and is controlled by ).
Pick . We consider three -invariant regions in according to the dynamics of points under :
-
(1)
points outside and those points inside that are stationary under . They do not contribute to .
-
(2)
the set of -periodic points under that never hit any of the remaining pairs of pants .
All non-stationary points are contained in the three cutoff strips near . Each strip has area and we have to remove those points that are not -periodic due to smoothing. Thus the set of -periodic points has area bounded between and . After removing points whose trajectories intersect we get the estimate
Points of are distributed in three strips near and their trajectories, depending on the strip, represent either or . and do not affect while the set of points in the class has and contributes
-
(3)
the set containing the rest of points (non-stationary points whose period is different from or whose trajectory under hits other pairs of pants). By a similar computation, . While we have less control on the dynamics of , we note that the velocity of points in under the flow is bounded by outside neighborhoods of the intersections (it can still be very large inside because of the adjustments). Also note that the time needed to travel between different neighborhoods is larger than . Hence for each , the trajectory has length at most .
Applying stabilization, the trajectory of under has length bounded by and can be presented as a product of at most elements from , so . The contribution of to is bounded in the absolute value by
Now note that for all , is -invariant and the action of coincides with that of . Indeed, for a point , for all as never hits the pairs of pants . More than that, the trajectory is homotopic relative endpoints to (other ingredients of can be homotoped away). The same is true for iterations of , hence contributes to the same amount as to . We finish with an observation that the sets are disjoint and do not intersect .
Let . If , the trajectory is the trajectory which was possibly deformed by the flows . Such deformation occurs each time crosses a pair of pants . Within time only one such crossing is possible. As the result, is homotopic (relative endpoints) to a path of length at most (the path can be longer than when either starts or ends at the intersection with other pair of pants). The same argument can be applied to points , and so on by induction. After taking iterations, trajectory of any is homotopic relative endpoints to a path shorter than , thus the contribution of to in the absolute value is at most
As a summary, points from contribute to at least . alters the result by at most . Points are stationary and do not contribute. We deduce
4.3. General case
Let be a symplectic surface of finite type and suppose is a genuine homogeneous quasimorphism. Pick such that (without loss of generality assume that ). Let be based loops representing , respectively. Denote by be the induced quasimorphism on . Let . We wish to construct a Hamiltonian diffeomorphism such that .
Step I: Pick a small tubular neighborhood of . Applying -small perturbations to we may assume that the three curves intersect (and self-intersect) transversely in a finite number of points and still lie in .
Step II: Consider deformed copies () of where the deformations are isotopic to the identity and area-preserving near so that:
-
•
no triple intersections of occur
-
•
the collection of loops does not have triple intersection/self-intersection points, the total number of intersections is finite and they are all transverse.
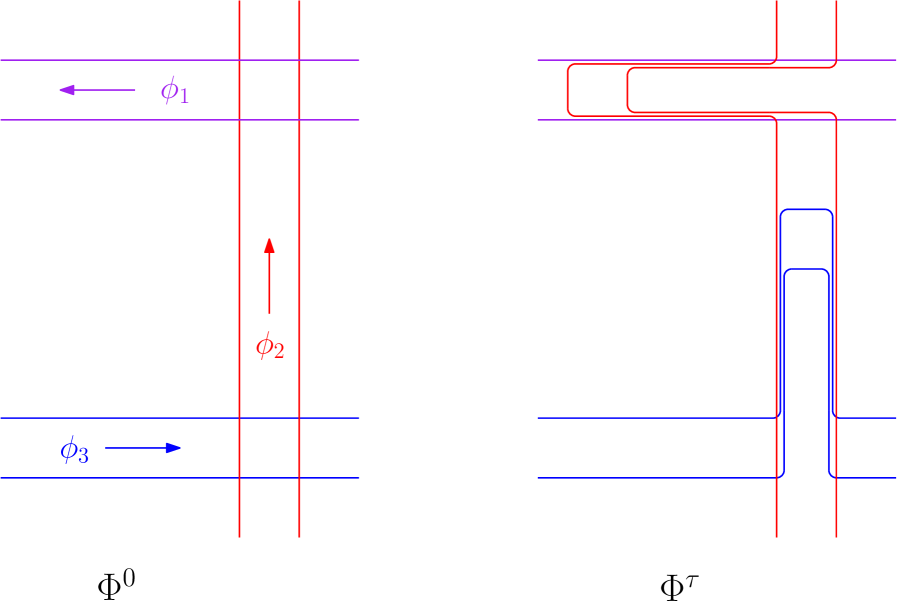
Step III: Construct a time-dependent Hamiltonian flow supported in a narrow tubular neighborhood of curves from which translates points along preserving orientation of curves and along with reversed orientation.
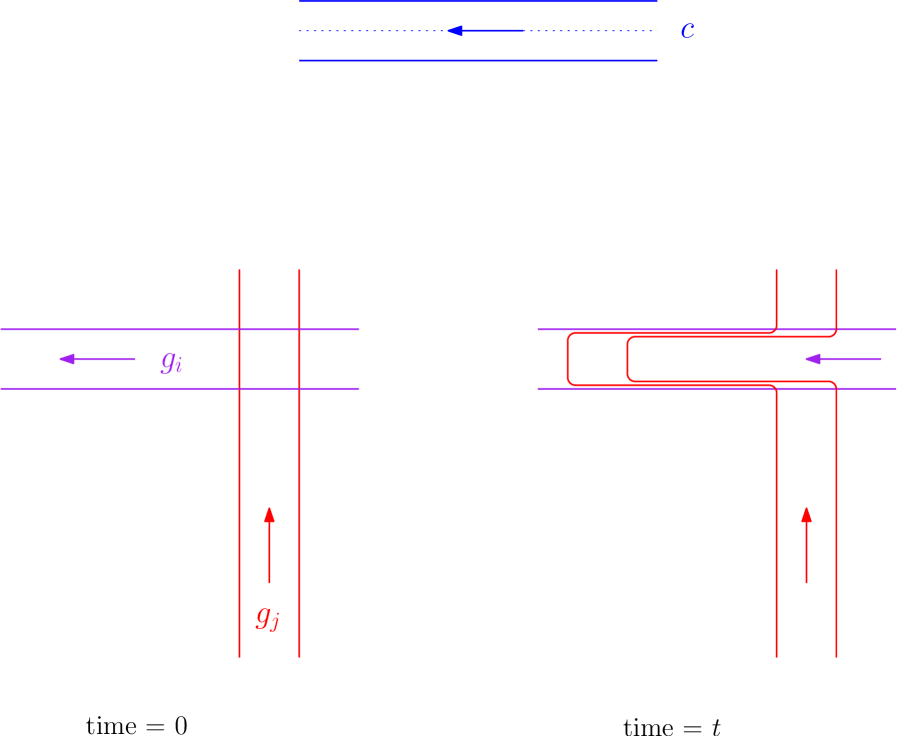
Local picture:
-
•
near a curve and away from intersection points the flow is a parallel translation of a narrow strip around with fixed velocity and flux . The flow is cut off in a smooth way so that it remains parallel to and the area affected by the cutoff is small.
-
•
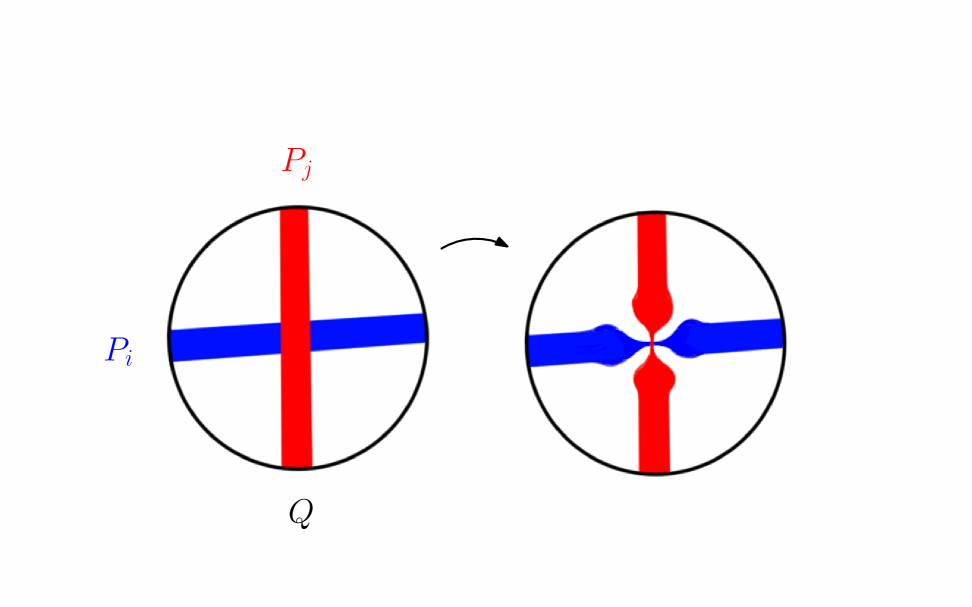
near an intersection of two curves (or a self-intersection of two arcs of the same curve from ): construct the flows parallel to as in the previous case. We may symplectically perturb near to ensure that is sufficiently small. Define the local flow to be the composition . Intuitively speaking, the curve and the flow following “drift” with .
For small enough the flow charts can be adjusted and patched together to form a global symplectic time-dependent flow . More than that, using local adjustments, one can ensure that:
-
•
flow strips around are narrow enough and stay inside .
-
•
local velocities are chosen in a way so that if one ignores all intersections, time needed to traverse a loop is the same for all loops in .
-
•
the total area of the cutoff zones and intersections / self-intersections of the flow strips is at most ( is a small parameter which will be specified later).
The construction described above works for where is the minimal time needed for an intersection point to leave the appropriate chart when it follows the flows or .
Clearly, the flow is area-preserving. We claim that it has zero flux, hence is Hamiltonian. Indeed, the flux along each is while the flux along is due to reversed orientation. A generic cycle in satisfies (the intersection points are counted with signs), so the fluxes cancel out. Denote by the Hamiltonian function which generates . It is a well known fact that equals the flux of through a curve which connects to (for a Hamiltonian flow the flux depends on the endpoints and not on the curve itself). The argument above also shows that the flux between two points is zero, hence, up to a shift by appropriate constant, .
For a generic curve connecting two points let (count with signs). Roughly, if one ignores the width of flow strips around the curves, measures the flux between and of the flows along . equals the maximal flux between any two points in . Fluxes of flows inside each are additive, so as long as no triple intersections are allowed and (meaning the curves do not drift far and combinatorics of their intersections does not change), the maximal flux of (and hence the variation of ) is at most . That is, the Hofer length of the isotopy is bounded by . Note that the bound may depend on the perturbations performed in Step I but does not depend on the choice of in Step II.
Pick for some . The flow strip around a curve has flux and period , hence has area equal to (up to effects of smoothing which slow down the flow and are controlled by ). We subtract points which are slowed by smoothing and also those whose trajectory under lands on the intersections/self-intersections of strips. The remaining region of area is -periodic and contributes to either
in the case , if or when for some .
The rest of non-stationary points (either affected by smoothing or those visiting intersections of strips) are contained in a region of area . The long-term dynamics of can be complicated, but locally (till time ) can visit at most one intersection of strips, so the length of trajectory is uniformly bounded. As the result, is also uniformly bounded by some and the contribution of to is bounded in the absolute value by
Summing up,
Now we pick small enough to ensure and perform rearrangements of smoothing and intersection zones to comply with this chosen value of . These local adjustments do not affect or estimates of trajectory lengths, hence all computations we performed above remain in place. The claim follows by picking such that .
4.4. Higher dimensions
The construction above can be lifted to a symplectic ball bundle . We lift the flow from and cut it off near . When the cutoff is steep enough, it affects only a small volume of motion while keeping dynamics under control (cutoff keeps the component of the flow velocity bounded and introduces a fast rotation around the boundary in the fiber coordinates. This rotation does not affect average homotopy classes of orbits.) Hence its effect on the quasimorphism can be made arbitrarily small. The bounds on the Hofer length in remain the same as in and non-continuity follows.
Let be a higher dimension symplectic manifold, a genuine homogeneous quasimorphism. Let be based loops in such that . Perturb so that they intersect at one point and that near the intersection they lie in a symplectic -disk . can be extended to a smooth symplectic surface with boundary which contains both and . By the symplectic neighborhood theorem, a small neighborhood of in is symplectomorphic to a ball bundle over . Now we may apply the construction for ball bundles and show non-continuity of the quasimorphism induced by .
Remark 2.
Lev Buhovsky has pointed out that in the case of ball bundles there is a much simpler construction of Hamiltonian flows which also shows non-continuity of quasimorphisms ( [Buh]). However this construction does not apply in the two-dimensional case so we could not avoid the more complicated setup.
5. Gambaudo-Ghys construction
5.1. The quasimorphisms
Let be a symplectic surface of finite type and area , equipped with an auxiliary Riemannian metric. Denote by the braid group with strands in and by the pure braid group. Suppose is an isotopy starting at the identity and ending at . Pick distinct points in to be a basepoint in the configuration space . For an we construct based loops by concatenating a short geodesic path with the trajectory and closing the loop by a short geodesic path . For almost all , the -tuple of loops defines a based loop in . can be identified with the pure braid group , hence defines an element in .
Let be a homogeneous quasimorphism. Then
defines a quasimorphism and its homogenization
does not depend on the choices of metric, basepoint , geodesic paths or , resulting in a homogeneous quasimorphism . For a more detailed explanation see [Bra].
This construction generalizes the quasimorphisms by Polterovich: , therefore for both constructions agree.
5.2. Noncontinuity
Denote by the subgroup of defined by fixing strands to and letting the first strand wind around. fits into a short exact sequence
where the map is the Chow homomorphism which “forgets” the first strand of .
We consider a particular family of quasimorphisms: suppose is a homogeneous quasimorphism such that the restriction is a genuine quasimorphism. We show that the quasimorphism induced by the Gambaudo-Ghys construction is not Hofer-Lipschitz.
Remark 4.
E. Shelukhin pointed out that in the case of surfaces with boundary, may be presented as a semidirect product of with ( is embedded into by adding a stationary strand near the boundary). In this case one can show by induction that every genuine homogeneous quasimorphism on restricts to a genuine quasimorphism on .
If has no boundary, consider a punctured surface . The natural inclusion induces a surjective homomorphism of braid groups. In this case the pullback quasimorphism satisfies the condition by the remark above, therefore its restriction is a genuine quasimorphism. But
hence is genuine as well.
Therefore this technical condition on is automatically satisfied.
When and , is finite and all homogeneous quasimorphisms are trivial. Otherwise is naturally isomorphic to the fundamental group of times punctured surface (see [Bir]). Let be the quasimorphism induced by . Pick such that .
We use construction from the previous section and apply a variation of the argument by T. Ishida [Ish]. Given and sufficiently small , consider a narrow region which contains loops representing classes . We place copies of in without triple intersections and construct . Let where is the common period for most non-stationary points under .
has several invariant subsets:
-
•
subsets that are fixed by . Trajectories of points in represent , while and represent and , respectively. Each of the three subsets has area ,
-
•
subset with . Trajectories in are beyond control and have topological complexity of ,
-
•
all remaining points in are stationary under the flow.
In addition, the Hofer norm and can be chosen arbitrarily small without affecting the estimates above.
Pick and such that . Rescale the symplectic form of so that and glue in disks of area in the punctures , respectively. The resulting surface has area hence is symplectomorphic to the unpunctured surface . induce Hamiltonian diffeomorphisms on which will be denoted by as well, and due to rescaling their Hofer norms satisfy
We estimate . Consider possible braids that arise from trajectories of by and their contribution to :
-
•
all points belong to the disks , hence are stationary. Such braids are trivial hence do not affect the value of .
-
•
one point lies in and exactly one point belongs to each disk , . Order of points does not matter: reordering of points corresponds to permutation of strands. is homogeneous, hence invariant under conjugations in that permute stands. Without loss of generality, assume . is induced by the trajectory of in and stationary strands in the disks.
(the same is true for iterations of ). contribute
while contributes
as can be chosen independently of . Stationary points in induce a trivial braid and do not contribute anything. The total contribution is
takes into account reorderings of points and the resulting coefficient
.
-
•
for some while the rest belong to disks and the correspondence between points and disks is not bijective. Let denote the indices of disks for the points in the ascending order of . The contribution of this configuration of points is given by
for some coefficient . Similarly to the previous case, the dynamics of implies that this coefficient scales linearly with (up to ), so we may rewrite
Summing over all configurations, we get the following polynomial in
which does not contain the monomial .
-
•
two points or more belong to , the rest lie in disks . Topological complexity of the strand is (this bound is independent of ) and the contribution is (areas are bounded by and can be incorporated into ).
So the total value of the quasimorphism is
The polynomial is not zero, so one may find values for in the simplex where the polynomial does not vanish. Pick . and are independent parameters. As soon as we fix (hence also and ), we let while are rescaled keeping their ratios constant and the total area
In the limit is proportional to while Hofer’s norm is bounded by . It follows that cannot be Lipschitz.
References
- [Ban] A. Banyaga. Sur la structure du groupe des diffeomorphismes qui preservent une forme symplectique. Comm.Math.Hel, 53:174–227, 1978.
- [BEP] P. Biran, M. Entov, and L. Polterovich. Calabi quasimorphisms for the symplectic ball. Commun. Contemp. Math., 6(5):793–802, 2004.
- [Bir] Joan S. Birman. Braids, Links, and Mapping Class Groups. (AM-82). Princeton University Press, 1974.
- [BO] L. Buhovsky and Y. Ostrover. On the uniqueness of Hofer’s geometry. Geom. Funct. Anal., 21(6):1296–1330, 2011.
- [Bra] M. Brandenbursky. Bi-invariant metrics and quasi-morphisms on groups of Hamiltonian diffeomorphisms of surfaces. Int. J. of Math., 26(9), 2013.
- [BS1] Michael Brandenbursky and Egor Shelukhin. On the large-scale geometry of the -metric on the symplectomorphism group of the two-sphere. arXiv e-prints, page arXiv:1304.7037, Apr 2013.
- [BS2] Michael Brandenbursky and Egor Shelukhin. On the -geometry of autonomous Hamiltonian diffeomorphisms of surfaces. Mathematical Research Letters, 22, 05 2014.
- [BS3] Michael Brandenbursky and Egor Shelukhin. The -diameter of the group of area-preserving diffeomorphisms of . Geom. Topol., 21(6):3785–3810, 2017.
- [Buh] L. Buhovsky. Private communication, December 2018.
- [Cal] Danny Calegari. scl., volume 20. Tokyo: Mathematical Society of Japan, 2009.
- [EP] M. Entov and L. Polterovich. Calabi quasimorphism and quantum homology. Int. Math. Res. Not., 2003(30):1635–1676, 2003.
- [Fat] Albert Fathi. Transformations et homeomorphismes preservant la mesure : systemes dynamiques minimaux. PhD thesis, Universite Paris-Sud, 1980.
- [GtG] Jean-Marc Gambaudo and Étetienne Ghys. Enlacements asymptotiques. Topology, 36(6):1355 – 1379, 1997.
- [Hof] H. Hofer. On the topological properties of symplectic maps. Proc. Royal Soc. Edinburgh, 115(1-2):25–38, 1990.
- [Ish] Tomohiko Ishida. Quasi-morphisms on the group of area-preserving diffeomorphisms of the 2-disk via braid groups. Proceedings of the American Mathematical Society, Series B, 1, 04 2012.
- [Kha] M. Khanevsky. Hofer’s metric on the space of diameters. JTA, 1(4):407–416, 2009.
- [Pol] L. Polterovich. Floer homology, dynamics and groups. In Morse Theoretic Methods in Nonlinear Analysis and in Symplectic Topology, volume 217 of NATO Sci. Ser. II: Math, Phys and Chem, pages 417–438. Springer Netherlands, 2006.
- [Sey] Sobhan Seyfaddini. Unboundedness of the Lagrangian Hofer distance in the Euclidean ball. Electronic Research Announcements in Mathematical Sciences [electronic only], 21:1–7, 10 2013.