.
Realizations of planar graphs as Poincaré-Reeb graphs of refined algebraic domains
Abstract.
Algebraic domains are regions in the plane surrounded by mutually disjoint non-singular real algebraic curves. Poincaré-Reeb Graphs of them are graphs they naturally collapse: such graphs are formally formulated by Sorea, for example, around 2020. Their studies found that nicely embedded planar graphs are Poincaré-Reeb graphs of some algebraic domains. These graphs are generic with respect to the projection to the horizontal axis. Problems, methods and results are elementary and natural and they apply natural approximations nicely for example.
We present our new approach to extension of the result to a non-generic case and an answer. We first formulate generalized algebraic domains, surrounded by non-singular real algebraic curves which may intersect with normal crossings. Such domains and certain classes of them appear in related studies of graphs and regions surrounded by algebraic curves explicitly.
Key words and phrases:
(Non-singular) real algebraic manifolds and real algebraic maps. Algebraic domains. Poincaré-Reeb Graphs. Singularity theory of Morse(-Bott) functions.2020 Mathematics Subject Classification: Primary 14P05, 14P10, 52C15, 57R45. Secondary 58C05.1. Introduction.
In real algebraic geometry, regions in the plane surrounded by (so-called) non-singular real algebraic curves are fundamental spaces and objects. [2, 24, 25] show a kind of studies which are also elementary, natural and surprisingly, developing recently. They try to understand the shapes, especially, convexity, of the regions. They are defined as algebraic domains. Graphs they naturally collapse to respecting the projection to the horizontal axis are introduced and shown to be important: hereafter let denote the -dimensional Euclidean space, which is also a smooth manifold equipped with the standard Euclidean metric, and the distance between and the origin under the metric as usual (). They have shown that for a naturally embedded planar graph being generic with respect to the projection, we can find an algebraic domain collapsing naturally to the graph. There classical and strong arguments such as approximation by real polynomials are essential. Such a graph is also named a Poincaré-Reeb graph of the algebraic domain. Our study extends their result to graphs which may not be generic in the sense above.
1.1. Our notation on topological spaces, manifolds and graphs.
Let with denote the so-called canonical projection where . We also use , for the -dimensional unit disk, and , for the -dimensional unit sphere, for example.
For a topological space and its subspace , we use for its closure and for its interior: we omit information on the outer space unless otherwise stated: we can guess from our arguments. For a topological space decomposed into a so-called cell complex, we can define the dimension uniquely as the dimension of the cell of the maximal dimension (only depending on the topology of ): topological manifolds, polyhedra, and graphs, which are regarded as -dimensional CW complexes, are of such a class. For a topological manifold whose boundary is non-empty, we use for its boundary and . For a smooth manifold and , we use for the tangent vector space of at . For smooth manifolds and and a smooth map , a point is its singular point if the rank of the differential is smaller than both the dimensions and : note that is a linear map. The zero set of a real polynomial map or more generally, a union of its connected components is non-singular if the polynomial map has no singular point in the set : remember the implicit function theorem.
A graph is a CW complex where an edge is a -cell and a vertex is a -cell. The set of all edges (vertices) of the graph is the edge set (vertex set) of the graph. Two graphs and are isomorphic if there exists a (piecewise smooth) homeomorphism mapping the vertex set of onto that of : such a homeomorphism is called an isomorphism of the graphs. A digraph is a graph all of whose edges are oriented and two digraphs are isomorphic if there exists an isomorphism of graphs between them preserving the orientations, which is defined as an isomorphism of the digraphs.
1.2. Refined algebraic domains.
Definition 1.
A pair of a family each of which is the zero set of a real polynomial and non-singular and to each of which is associated and a region satisfying the following conditions is called a refined algebraic domain.
-
(1)
The region satisfies and a bounded connected component of and the intersection is non-empty for any curve .
-
(2)
At points in , at most two distinct curves intersect and the following are satisfied: for each point in such an intersection, the sum of the tangent vector spaces of them at coincides with the tangent vector space of at .
This also respects [13] for example. We discuss the restriction of to . We consider the set of all points in the following. This is finite thanks to the real algebraic situation.
-
•
Points in which are also in exactly two distinct curves and .
-
•
If we remove the finite set before from the set of dimension , then we have a smooth manifold of dimension (a curve which is not necessarily connected) and which has no boundary. Points which are singular points of the restriction of to the obtained smooth curve in .
We can define the following equivalence relation on : two points are equivalent if and only if they belong to a same component of the preimage of a single point for the restriction of to . Let denote the quotient map and the function uniquely defined by the relation . The quotient space is a digraph by the following. We can check this from general theory [21, 22] or see [12] for example: we do not need to understand this theory.
-
(1)
The vertex set is the set of all points whose preimage contains at least one point of the finite set above.
-
(2)
The edge connecting and are oriented as one departing from and entering according to .
Definition 2.
We call the (di)graph above a Poincaré-Reeb (di)graph of .
As this graph, we can consider a situation where for a graph , a nice map on its vertex set onto a partially ordered set is given and orients the graph according to the values. More precisely, each edge of the graph connects two distinct vertices and and it is oriented. Furthermore, it is oriented according to the rule: the edge departs from and enters if : let denote the order on . We call a pair of such a graph and a map a V-digraph. For V-graphs, isomorphisms between two V-digraphs and the notion that two V-digraphs are isomorphic can be defined, based on the property of preserving the orders of the values of the maps . We can also define the Poincaré-Reeb V-digraph of by associating the function .
1.3. Our main result.
Two graphs, digraphs, and V-digraphs are weakly isomorphic if there exists a homeomorphism regarded as an isomorphism after suitable addition of finitely many vertices: the edge sets of the graphs also change.
Theorem 1.
For any graph and a piecewise smooth function such that the restriction is injective for each edge of , we can canonically give the structure of a V-digraph by the function . We also assume the following.
-
(1)
The function is the composition of some piecewise smooth embedding with .
-
(2)
The degree of each vertex of is not . The local extremum of must be achieved at a vertex of degree .
Then we have a refined algebraic domain and its Poincaré-Reeb V-digraph of and the V-digraph are weakly isomorphic.
Note that [2] has shown a generic case: the degrees of vertices are always or with the values of at distinct vertices being always distinct. They only consider real algebraic domains: curves are mutually disjoint. On the other hand, the resulting V-digraphs have been shown to be isomorphic in the case. The constraint that curves are the zero sets of some real polynomials is not considered there and the author has commented first in [11]: in the original study the curves are only unions of some connected components of the zero sets.
1.4. Organization of our paper and our main work.
In the next section, we show Theorem 1. In the third section, we introduce that our graph is regarded as the so-called Reeb graph of a nice real algebraic function. The Reeb graph of a smooth function is a classical and fundamental object ([20]). This is defined as the quotient space of the manifold similarly to Poincaré-Reeb graphs. This represents the manifold compactly. This also gives a new answer to the following: can we reconstruct a real algebraic function whose Reeb graph is isomorphic to the given graph? We also present related studies since the birth of the study by Sharko ([23]), in 2006, reconstructing nice differentiable (smooth) functions on closed surfaces.
2. A proof of Theorem 1.
In this section, we prove Theorem 1, our main new result.
We use fundamental arguments from singularity theory and real algebraic geometry. Especially, approximations.
See [6] for singularity theory of differentiable maps. For example, we mainly consider the Hesse matrix of a differentiable maps of the class , the symmetric matrix canonically defined as the matrix of the second derivatives. Smooth functions such that the determinant of the Hesse matrix, or the Hessian, at each point of the space of the domain is not , are important. Such a function is also a so-called Morse function. A Morse-Bott function is a smooth function whose singular point is represented as the composition of a smooth map with no singular point with a Morse function for suitable local coordinates.
See [1, 14, 15] for real algebraic geometry, for example. See also [3] for approximations by real polynomials.
Last, our present approximation mainly respects [2] as an explicit and important case and revises some. We respect these arguments from singularity theory and approximations implicitly.
Related to this, see also [11] where we do not assume the arguments from the preprint.
Hereafter, an ellipsoid of centered at a point means a set of the form where . Sets of this type are also important.
A proof of Theorem 1.
We consider the graph . We can change the graph which is also a CW complex as follows.
Here, we choose sufficiently small positive numbers . We can choose them so that we can argue with no problem. We can see this by following our arguments.
First we consider a point where the preimage contains at least one vertex of . We can choose vertices and contained in the preimage in such a way that the value is the minimum of the values of the second components among such vertices in the preimage and that the value is the maximum of the values of the second components among such vertices in the preimage. We first add a segment .
We have a new CW complex . Let be a vertex such that does not have a local extremum at , which is also regarded as a vertex of .
Let be a neighborhood represented as .
We define and where another sufficiently small positive number is chosen.
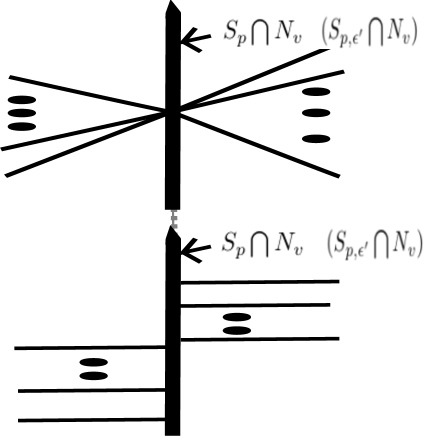
The set is finite. There exists a curve in and an edge departing from each point there to the vertex . We change each of these curves to a union of two segments intersecting in a one-point set. More precisely, we can change and change the curves as follows.
For each curve in , the first segment is a straight segment departing from the point and entering another point , which is a point in . We also choose these segments as mutually disjoint ones.
Next, for each curve, the second segment is chosen as the unique horizontal segment connecting and a point in the segment , which can be uniquely chosen. We also construct the segments in such a way that the horizontal segments from points , the values of whose first components are , are beyond the horizontal segments from points , the values of whose first components are . Thus is changed.
For all of such vertices and values with the preimages containing some vertices in the graph , we can do similarly and do. We also remove for all the values here. Thus we have a new 1-dimensional CW complex from .
For , we can consider a sufficiently small regular neighborhood [7] as a -dimensional smooth compact submanifold in . We can also choose in such a way that the boundary is the zero set of some real polynomial and a non-singular set according to the presented theory on approximation. More precisely, we can do so that the restriction of to the boundary satisfies the following.
-
•
The restriction is a Morse function.
-
•
All of singular points of the restriction is as follows.
-
–
Each singular point of the function is corresponded to either a vertex of of degree which is also sufficiently close or a connected component of whose closure contains no point of the form where all vertices as argued above are considered.
-
–
In addition, the correspondence is a one-to-one correspondence. We name the singular point of the function of the first (second) type a definite (resp. indefinite) type.
-
–
At a definite type singular point of the function the value is greater (resp. smaller) than the value at the corresponding vertex of if has a local maximum (resp. minimum). Note that the values are also sufficiently close.
-
–
Each indefinite type singular point of the function is in the corresponding connected component of whose closure contains no point of the form and is sufficiently close to the segments and .
-
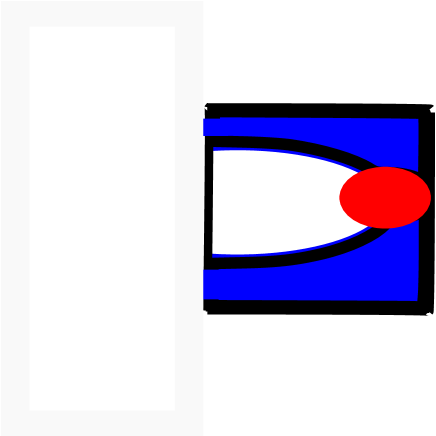
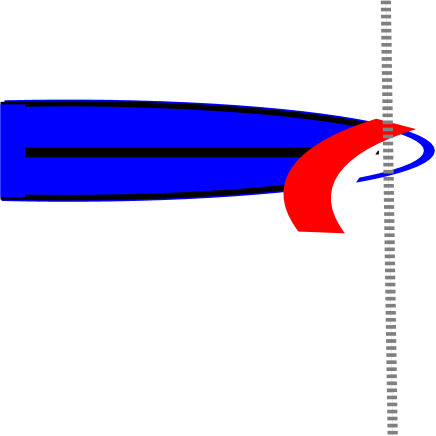
–
We can put a sufficiently small suitable ellipsoid centered at an indefinite type singular point of the function in in such a way that the boundary of the ellipsoid contains a point . At a definite type singular point of the function, we can put a sufficiently small circle containing exactly two points in in such a way that one of the points is of the form and sufficiently close to and that the restriction of the projection to the intersection of the small circle and is injective.
We have a new set by removing the intersection of and each ellipsoid and the disk bounded by each new small circle from . We naturally have a new refined algebraic domain and we can check that this is our desired refined algebraic domain.
This completes the proof. ∎
3. Relations with Reeb graphs of real algebraic functions.
This section presents a kind of applications to construction of examples in real algebraic geometry and singularity theory of differentiable (smooth) maps. We assume several arguments from the published article [9] and our preprints [10, 11, 12].
We can define the Reeb (V-di)graph of a smooth function on a closed manifold as follows. These graphs have been classical and strong tools in understanding the manifolds ([20]).
Two points of are equivalent if and only if they are in a same connected component of the preimage . Let denote the equivalence relation and the quotient space. Let denote the quotient map associated with the unique continuous function satisfying . The vertex set of can be defined as the set of all elements such that the preimage contains at least one singular point of in the case where the image of the set of all singular points of is a finite set ([21, 22]). The graph is the Reeb graph of and the pair of the graph with (the restriction of) the function (to the vertex set) is the Reeb V-digraph of .
We define a surjective map onto some finite set . We also pose the constraint that for two distinct curves which intersect in , the values of the map are distinct. We also define another positive integer valued function on . Let : here for the notation is the -th component of for example. This is the zero set of a real polynomial map in and non-singular. We omit precise arguments. See [10]. [12] also presents this. We consider the restriction of to . The Reeb V-digraph of the resulting function is isomorphic to the Poincaré-Reeb V-digraph of . See [10, 12] again and see also [9] and the preprint [11]. By our construction, we can check that the resulting function is a Morse-Bott function.
Related to this we explain history of reconstruction of nice smooth functions and the manifolds from given graphs.
[23] is a pioneering study, constructing nice smooth functions whose Reeb graphs are isomorphic to given finite graphs of a certain nice class. The functions are locally elementary polynomials. This is extended in [17] to the case of all finite graphs. [18] studies the Morse function case mainly the case of functions on closed surfaces. [16, 19] study a kind of general theory of Morse functions and their Reeb graphs. [19] mainly studies deformations of Morse functions via deformations of Reeb graphs. Following [19], [16] studies classifications of Morse functions on manifolds of general dimensions via systems of hypersurfaces, represented as preimages of the functions, for example. [4, 5] study the Morse-Bott function case, mainly the case of functions on closed surfaces. [8] studies cases of functions of certain classes naturally generalizing the classes of Morse-Bott functions on -dimensional closed manifolds where surfaces of preimages of points are prescribed. This is regarded as a pioneering study considering cases where preimages of single points are prescribed before reconstruction of functions.
The case of globally real algebraic functions is pioneered in [9].
Our theorem gives a kind of new answers to the real algebraic case. We can reconstruct real algebraic functions whose Reeb graphs are only homeomorphic to the given graphs. Related to this, [4] is for reconstruction of Morse-Bott functions in the differentiable (smooth) situation whose Reeb graphs are only homeomorphic to the given graphs.
4. Conflict of interest and Data availability.
Conflict of interest.
The author works at Institute of Mathematics for Industry (https://www.jgmi.kyushu-u.ac.jp/en/about/young-mentors/). This is closely related to our study. We thank them for supports and encouragement. The author is also a researcher at Osaka Central
Advanced Mathematical Institute (OCAMI researcher), which is supported by MEXT Promotion of Distinctive Joint Research Center Program JPMXP0723833165. He is not employed there. We also thank them. The author would also like to thank the conference ”Singularity theory of differentiable maps and its applications” (https://www.fit.ac.jp/fukunaga/conf/sing202412.html) for an opportunity to present [9, 10, 11]. Comments presented there have motivated the author to study further including the present study. This conference is also supported by the Research Institute for Mathematical Sciences, an International Joint Usage/Research Center located in Kyoto University.
Data availability.
Data essentially related to our present study are all in the present file.
References
- [1] J. Bochnak, M. Coste and M.-F. Roy, Real algebraic geometry, Ergebnisse der Mathematik und ihrer Grenzgebiete (3) [Results in Mathematics and Related Areas (3)], vol. 36, Springer-Verlag, Berlin, 1998. Translated from the 1987 French original; Revised by the authors.
- [2] A. Bodin, P. Popescu-Pampu and M. S. Sorea, Poincaré-Reeb graphs of real algebraic domains, Revista Matemática Complutense, https://link.springer.com/article/10.1007/s13163-023-00469-y, 2023, arXiv:2207.06871v2.
- [3] N. Elredge, Answer to On finding polynomials that approximate a function and its derivative, StackExchange, question 555712 (2013), https://math.stackexchange.com/questions/555712/on-finding-polynomials-that-approximate-a-function-and-its-derivative-extension.
- [4] I. Gelbukh, A finite graph is homeomorphic to the Reeb graph of a Morse-Bott function, Mathematica Slovaca, 71 (3), 757–772, 2021; doi: 10.1515/ms-2021-0018.
- [5] I. Gelbukh, Morse-Bott functions with two critical values on a surface, Czechoslovak Mathematical Journal, 71 (3), 865–880, 2021; doi: 10.21136/CMJ.2021.0125-20.
- [6] M. Golubitsky and V. Guillemin, Stable Mappings and Their Singularities, Graduate Texts in Mathematics (14), Springer-Verlag (1974).
- [7] M .W. Hirsch, Smooth regular neighborhoods, Ann. of Math., 76 (1962), 524–530.
- [8] N. Kitazawa, On Reeb graphs induced from smooth functions on -dimensional closed orientable manifolds with finitely many singular values, Topol. Methods in Nonlinear Anal. Vol. 59 No. 2B, 897–912, arXiv:1902.08841.
- [9] N. Kitazawa, Real algebraic functions on closed manifolds whose Reeb graphs are given graphs, Methods of Functional Analysis and Topology Vol. 28 No. 4 (2022), 302–308, arXiv:2302.02339, 2023.
- [10] N. Kitazawa, Reconstructing real algebraic maps locally like moment-maps with prescribed images and compositions with the canonical projections to the -dimensional real affine space, the title has changed from previous versions, arXiv:2303.10723, 2024.
- [11] N. Kitazawa, Some remarks on real algebraic maps which are topologically special generic maps, submitted to a refereed journal, arXiv:2312.10646.
- [12] N. Kitazawa, Arrangements of small circles for Morse-Bott functions and regions surrounded by them, arXiv:2412.20626v3, 2025.
- [13] K. Kohn, R. Piene, K. Ranestad, F. Rydell, B. Shapiro, R. Sinn, M-S. Sorea and S. Telen, Adjoints and Canonical Forms of Polypols, to appear in Documenta Mathematica, arXiv:2108.11747.
- [14] J. Kollár, Nash’s work in algebraic geometry, Bulletin (New Series) of the American Matematical Society (2) 54, 2017, 307–324.
- [15] Camillo De Lellis, The Masterpieces of John Forbes Nash Jr., The Abel Prize 2013–2017 (Helge Holden and Ragni Piene, eds.), Springer International Publishing, Cham, 2019, 391–499, https://www.math.ias.edu/delellis/sites/math.ias.edu.delellis/files/Nash_Abel_75.pdf, arXiv:1606.02551.
- [16] W. Marzantowicz and L. P. Michalak, Relations between Reeb graphs, systems of hypersurfaces and epimorphisms onto free groups, Fund. Math., 265 (2), 97–140, 2024.
- [17] Y. Masumoto and O. Saeki, A smooth function on a manifold with given Reeb graph, Kyushu J. Math. 65 (2011), 75–84.
- [18] L. P. Michalak, Realization of a graph as the Reeb graph of a Morse function on a manifold. Topol. Methods in Nonlinear Anal. 52 (2) (2018), 749–762, arXiv:1805.06727.
- [19] L. P. Michalak, Combinatorial modifications of Reeb graphs and the realization problem, Discrete Comput. Geom. 65 (2021), 1038–1060, arXiv:1811.08031.
- [20] G. Reeb, Sur les points singuliers d´une forme de Pfaff complétement intègrable ou d´une fonction numérique, Comptes Rendus Hebdomadaires des Séances de I´Académie des Sciences 222 (1946), 847–849.
- [21] O. Saeki, Reeb spaces of smooth functions on manifolds, International Mathematics Research Notices, maa301, Volume 2022, Issue 11, June 2022, 3740–3768, https://doi.org/10.1093/imrn/maa301.
- [22] O. Saeki, Reeb spaces of smooth functions on manifolds II, Res. Math. Sci. 11, article number 24 (2024), https://link.springer.com/article/10.1007/s40687-024-00436-z.
- [23] V. Sharko, About Kronrod-Reeb graph of a function on a manifold, Methods of Functional Analysis and Topology 12 (2006), 389–396.
- [24] M. S. Sorea, The shapes of level curves of real polynomials near strict local maxima, Ph. D. Thesis, Université de Lille, Laboratoire Paul Painlevé, 2018.
- [25] M. S. Sorea, Measuring the local non-convexity of real algebraic curves, Journal of Symbolic Computation 109 (2022), 482–509.