Rigidity results for large displacement quotients of mapping class groups
Abstract.
We consider quotients of mapping class groups of orientable, finite type surfaces by subgroups whose action on the curve graph has large displacement. This class includes quotients by the normal closure of a pseudo-Anosov element, the mapping class group itself, and in view of forthcoming work of Abbott-Berlyne-Ng-Rasmussen also random quotients. First, we show that every automorphism of the corresponding quotient of the curve graph is induced by a mapping class, thus generalising Ivanov’s Theorem about automorphisms of the curve graph. Then we use this to prove quasi-isometric rigidity under additional assumptions, satisfied by all aforementioned quotients. In the process, we clarify a proof of quasi-isometric rigidity of mapping class groups by Behrstock, Hagen, and Sisto. Finally, we show that the outer automorphisms groups of our quotients, as well as their abstract commensurators, are “the smallest possible”.
Introduction
In recent years there has been a growing interest in studying quotients and subgroups of mapping class groups of orientable, finite type surfaces, in order to establish the analogues of Ivanov’s theorem about automorphisms of the curve graph and its consequences (see e.g. [BM19, McL19] for a wide class of normal subgroups, and, among others, [MS23] for quotients by large enough powers of Dehn Twists).
In this paper, we address the problem for a class of quotients which we call large displacement quotients. The defining property, articulated in Definition 1.2, is that every non-trivial element in the kernel acts with large displacement on the curve graph of the surface, that is, the distance between any vertex and its image is bounded from below by a large enough constant, which we call the minimum displacement. An example of such behaviour is the quotient by the normal closure of some power of a pseudo-Anosov element, which was studied in e.g. [DGO17] to answer questions about the existence of normal free subgroups of . Furthermore, the definition applies to the mapping class group itself, seen as the quotient by the trivial subgroup.
We have three main results, which we think of as rigidity properties of our quotients. The first one is a generalisation of a celebrated theorem of Ivanov-Korkmaz [Iva97, Kor99], and morally tells us that all properties of a large displacement quotient are already encoded in the action on the corresponding quotient of the curve graph. Here denotes the extended mapping class group, where we allow orientation-reversing mapping classes.
Theorem 1.
Let be a surface of complexity at least which is not , and let be a normal subgroup. If the minimum displacement of is large enough, then the map , induced by the action of on , is an isomorphism.
The bound on the minimum displacement is made precise in Theorem 2.1. A similar result holds for some surfaces of low complexity too, but in these cases the map might only be surjective with finite kernel (see Subsection 2.1 for the details).
In the second half of the paper, we restrict our attention to those large displacement quotients admitting a hierarchically hyperbolic group (HHG) structure, in the sense of [BHS19]. We also require the structure to be “inherited” from the standard HHG structure of the mapping class group, in a sense that is clarified in Convention 3.2. Roughly, we ask that the domain set of the HHG structure consists almost exclusively of all -orbits of surfaces, that the top-level coordinate space coincides with , and that the coordinate space of the orbit of a subsurface is quasi-isometric to the curve graph of . The class of quotients admitting such a HHG structure, which we call “surface-inherited”, includes:
For such quotients, we can state our second main result, which is quasi-isometric rigidity. Recall that two groups and are weakly commensurable if there exist two finite normal subgroups and such that the quotients and have two finite index subgroups that are isomorphic.
Theorem 2.
Let be a surface of complexity at least which is not a torus with two punctures, and let be a normal subgroup. If the minimum displacement of is large enough, and if has a surface-inherited HHG structure, then is quasi-isometrically rigid, meaning that if a finitely generated group and are quasi-isometric then they are weakly commensurable.
Since itself is a large displacement quotient, we also recover quasi-isometric rigidity of mapping class groups, first proven in [BKMM12].
Finally, combining quasi-isometric rigidity and results on automorphisms of acylindrically hyperbolic groups from [AMS16], we are able to deduce the following, which can be regarded as a form of algebraic rigidity and is a generalisation of a result of Ivanov for mapping class groups [Iva97]:
Theorem 3 (Algebraic rigidity).
Let be either a surface of complexity at least (excluding the case ) or a , and let be a large displacement quotient with a surface-inherited HHG structure. If the minimum displacement is large enough, then the following facts hold:
-
(1)
The map , which maps every element to the corresponding inner automorphism, is an isomorphism. In particular, is trivial.
-
(2)
The abstract commensurator of coincides with itself. In particular, any isomorphism between finite index subgroups of is the restriction of an inner automorphism.
Sketch of proofs
Combinatorial rigidity
To show that any automorphism is induced by some element we proceed as follows. First, we find an automorphism which “lifts” , i.e. that makes the following diagram commute, where is the quotient map:
The key observation is that, if we regard both and as simplicial complexes, then is a covering map (see Lemma 2.2). Moreover, by a result of Harer [Har86], is simply connected whenever has large enough complexity, and we can lift by standard arguments of covering theory. Then one can apply a result of Ivanov-Korkmaz [Iva97, Kor99] to show that the lift is induced by a mapping class , and therefore its image induces .
Quasi-isometric rigidity
We follow a general strategy, developed by Jason Behrstock, Mark Hagen, and Alessandro Sisto in [BHS21], to prove quasi-isometric rigidity of certain HHG. The key idea from that paper is that any self-quasi-isometry of a HHG, satisfying some additional assumptions, induces an automorphism of a certain graph, which should be thought of as encoding the intersection patterns of maximal quasiflats (that is, quasi-isometric embeddings of of maximum dimension). In the case of , such graph is precisely the quotient of the curve graph, since maximal quasiflats of morally correspond to subgroups generated by maximal families of commuting Dehn Twists. But then, by the combinatorial rigidity results from Section 2, the automorphism of is induced by some element , and with a little more effort one can show that coarsely coincides with the left multiplication by .
In [BHS21], the main result to extract combinatorial data from a self-quasi-isometry of a HHG is [BHS21, Theorem 5.7], which is then used in [BHS21, Theorem 5.10] to give a new proof of quasi-isometric rigidity of mapping class groups. Unfortunately, as pointed out by Jason Behrstock after that paper was published, [BHS21, Theorem 5.7] does not apply to mapping class groups. Indeed, if is a subsurface of complexity , then any maximal collection of pairwise disjoint subsurfaces that contains must also contain the boundary annuli of . Hence, mapping class groups do not satisfy [BHS21, Assumption 2], which roughly states that such a should be the only subsurface shared by two maximal collections of pairwise disjoint subsurfaces.
Behrstock, Hagen, and Sisto, worked out a modification of their Assumptions which allows them to prove a version of [BHS21, Theorem 5.7] which applies to the mapping class group. Rather than writing their argument separately, they instead opted to allow me to incorporate a version of those assumptions into this work, and I am extremely grateful for this possibility. Then the proof of [BHS21, Theorem 5.10] runs verbatim once one replaces [BHS21, Theorem 5.7] with our Lemma 3.18, whose Assumptions (A) - (F) are satisfied by both and our quotients (see Lemma 3.20).
Algebraic rigidity
Given an isomorphism between finite-index subgroups of , one can consider the element whose left-multiplication coarsely coincides with , seen as a self-quasi-isometry of , and then try to prove that the conjugation by restricts to the given isomorphism on . We do just that in Theorem 4.1, using tools from [AMS16] for acylindrical group actions on hyperbolic spaces. We can use such tools since, by [BHS17b, Corollary 14.4], acts acylindrically on the top-level coordinate space of the HHG structure, which coincides with for those quotients satisfying Convention 3.2. Notice that finite normal subgroups could cause the outer automorphism group to be finite rather than trivial, so the key technical results we need is that does not contain non-trivial finite normal subgroups, Lemma 4.7.
Comparison with quotients by large powers of Dehn twists
Very similar results hold for quotients of the form , where is the normal subgroup generated by all -th powers of Dehn Twists. Such quotients can be regarded as “Dehn filling quotients” of mapping class groups, as pointed out and explored in [DHS21] and then in [BHMS20], where they are proven to be hierarchically hyperbolic. Moreover, in view of [MS23], they enjoy the same combinatorial, quasi-isometric, and algebraic rigidity properties as our quotients (at least when is a punctured sphere, and conjecturally also in the general case). While the proofs there also rely on lifting, the quotient map is not a covering map, and indeed it is quite far from being locally injective; therefore lifting properties follow from different technologies, involving results from [Dah18] about rotating families and the existence of finite rigid sets as defined in [AL13]. Moreover, in this paper quasi-isometric rigidity relies on the fact that Dehn twist flats survive in the quotient, while they disappear in the quotient by for any choice of . In particular, quasi-isometries of induce automorphisms of a graph which is not , and then one has to relate these two graphs with further combinatorial considerations.
Questions
The following question was asked by Jason Behrstock, during an exchange on a first draft of this paper:
Question 1.
Let be either a surface of complexity at least (excluding the case ) or a , and let be a large displacement quotient with a surface-inherited HHG structure. Does there exist such that, if the minimum displacement is at least , any injection from a finite index subgroup to is induced by an inner automorphism?
This would be a strengthening of our Theorem 3, where we also require the image of the injection to have finite index. Indeed, our proof needs this further assumption, since we want to apply Theorem 2 in order to find a candidate element of , and an isomorphism between subgroups is a quasi-isometry of if and only if both its domain and image are of finite index.
Question 1 would also be a generalisation of the analogue results for mapping class groups, proved by Irmak in [Irm06a, Irm04, Irm06b] and then extended by Behrstock-Margalit in [BM06]. The main strategy of all these papers is articulated in two steps:
-
•
First, one proves that any superinjective map of (that is, any self-map preserving adjacency and non-adjacency between vertices) is induced by an element of . This is a generalisation of Ivanov’s combinatorial rigidity theorem, since a simplicial isomorphism is clearly superinjective.
-
•
Then one shows that any injection from a finite-index subgroup of into maps powers of Dehn Twists to powers of Dehn Twists, preserving commutation and non-commutation. Therefore the injection induces a superinjective map of , and one finds a candidate element of whose conjugation restricts to the given injection.
Therefore, if we want to repeat the same argument for our quotients, we need to answer the following:
Question 2.
In the setting of Question 1, is any superinjective map of induced by an element of ?
This would be a generalisation of Theorem 1, which I believe to be true. One could try to lift a superinjective map of to a superinjective map of , and then conclude by the results of Irmak and Behrstock-Margalit.
Question 3.
In the setting of Question 1, does the injection map powers of Dehn Twists to powers of Dehn Twist?
Irmak proof is ultimately a refined version of Ivanov’s characterisation of Dehn Twists from [Iva88], in terms of the centres of their centralisers in , which might extend to our quotients. I believe this is one more reason to try to understand better centralisers in hierarchically hyperbolic groups.
Outline of the paper
In Section 1 we gather some examples of the quotients by subgroups with large displacement, and we develop the lifting tools that are used throughout the paper.
In Section 2 we prove combinatorial rigidity for the general case, which is Theorem 2.1, and for some low-complexity surfaces, see Subsection 2.1. This establishes Theorem 1.
Section 3 is devoted to the proof of Theorem 2. First, we show that a self-quasi-isometry of a hierarchically hyperbolic space, satisfying certain properties (which are Assumption (A) - (F)), induce an automorphism of a certain graph, which encodes the intersections of certain maximal quasiflats (see Lemma 3.18). Then in Subsection 3.5 we relate such graph to , and in the proof of Theorem 3.8 we use the combinatorial rigidity results from Section 2 to produce an element of whose left-multiplication is within finite distance from the quasi-isometry.
We conclude the paper with Section 4, where we use quasi-isometric rigidity and some tools from [AMS16] about acylindrical actions on hyperbolic spaces to show that any automorphism between finite index subgroups of is the restriction of the conjugation by a unique element (see Theorem 4.1 for the existence of such an element, and Lemma 4.8 for the uniqueness). Therefore, the outer automorphism group of , as well as its abstract commensurator, are the smallest possible, as clarified in Corollaries 4.9 and 4.10. This proves the two parts of Theorem 3.
Acknowledgements
I would like to thank Jason Behrstock, Mark Hagen, and Alessandro Sisto for sharing with me their previous attempts to find a different set of assumptions under which the conclusion of [BHS21, Theorem 5.7] holds, and for suggesting many corrections to the first draft of this paper. I am especially grateful to my supervisor Alessandro Sisto for his constant support. I am also grateful to Piotr Przytycki for suggesting a way to shorten the proof of Theorem 2.8. Finally, I thank Carolyn Abbott, Daniel Berlyne, Thomas Ng, and Alexander Rasmussen for fruitful discussions.
1. Large displacement quotients
Let be a surface of finite type, that is, a surface obtained from a closed, connected, oriented surface after removing a finite number of points, called punctures. When we want to emphasise the genus and the number of punctures we will use the notation , and we will denote by the complexity of . Let be the curve graph of , whose vertices are (isotopy classes of) curves and adjacency corresponds to disjointness. Whenever it will not cause ambiguity, we will always say “curve” to mean its isotopy class. Finally, let be the extended mapping class group of , where we allow orientation-reversing mapping classes. If is a curve and is a mapping class, we will denote the image of under simply by .
Let us introduce which quotients of we are considering.
Definition 1.1 (Minimum displacement).
The minimum displacement of a mapping class is defined as . Similarly, the minimum displacement of a subgroup is defined as
where is the identity.
Definition 1.2 (Large displacement quotient).
Let be a normal subgroup, and let . We will say that the quotient group is a -large displacement quotient if the minimum displacement of is at least .
Here are some examples of this behaviour.
Example 1.3.
Definition 1.2 applies to the trivial subgroup , thus itself is a -large displacement quotient for every .
Example 1.4.
Let be a pseudo-Anosov element. For every one can find some large enough such that has minimum displacement at least . Moreover, up to choosing a larger , the quotient by the normal closure is a -large displacement quotient. We will give a proof in Corollary 3.6, after we have developed some more notation.
1.1. Isometric projections
Let be a -large displacement quotient. Since acts on by simplicial automorphisms, we can consider the quotient by this action. Here we gather some properties of and the projection map , which hold whenever is large enough:
Lemma 1.5.
Let be a -large displacement quotient. If then is a simplicial graph.
Proof.
By definition of quotient by a simplicial action, there is an edge in between two vertices if they admit two adjacent representatives in . First notice that, by the assumption on the minimum displacement, two vertices in the same -orbit cannot be adjacent, hence no edge of connects a vertex to itself. Moreover, we claim that no two vertices are connected by more than one edge. Indeed, if there were two edges between them, we could find two edges and between representatives of and , respectively. We can further assume that , up to replacing with one of its -translates. But then and would be -translate within distance at most , contradicting the fact that the minimum displacement is at least . ∎
Definition 1.6.
Let be a subgraph of . We say that a subgraph of is a lift of if the projection map restricts to an isometry between and .
Lemma 1.7 (Isometric lifts and projections).
Let be a -large displacement quotient. If then the following facts hold for the projection :
-
•
is -Lipschitz;
-
•
For every combinatorial path there exists a combinatorial path such that , and moreover if is geodesic then so is ;
-
•
For every , restricts to an isometry between the closed ball of radius centred at , which we denote by , and the closed ball of radius centred at its projection , which we denote by ;
-
•
Every subgraph of which is contained in a closed ball of radius admits a unique -orbit of lifts.
It is possible that our bound on can be sharpened. However this is irrelevant, since in all notable applications one is always allowed to replace with a suitable finite-index subgroup, in order to make the minimum displacement larger.
Proof.
The quotient map is -Lipschitz since the action of on is simplicial. In order to find a combinatorial path which projects to a given path it suffices to lift one edge at a time, given a lift of its starting point, and again this can be done since the action is simplicial. Notice that, by construction, has the same length of . Moreover, suppose that is a geodesic between its endpoints , which lift to the endpoints of . Then, denoting by the length of , and similarly for , we get
where we used that realises the distance between and , and that the projection map is -Lipschitz. But then the inequalities above are all equalities, and in particular realises the distance between its endpoints, i.e., it is a geodesic path.
Now, let and let be its projection. Combining the previous points we have that , so we are left to show that, for every , we have that , where and are the respective projections. If by contradiction this was not the case, then we could pick any geodesic between and . Notice that, since and is -Lipschitz, we have that , thus must have length at most . Now lift to a geodesic path starting at and ending at some in the same orbit of . But then and would be within distance at most , contradicting the assumption on the minimum displacement.
For the last statement, every subgraph which is contained in a closed -ball admits a lift, by applying the local inverse of . Given any two lifts , let and be two points with the same projection, so that there exists an element such that . Now pick another pair and with the same projection. Since and are within distance at most , by the assumption on the minimum displacement we must have that . Hence , that is, all lifts belong to the same -orbit. ∎
1.2. Orbits of subsurfaces
We conclude the Section with a study of how acts on the subsurfaces of . We first recall a definition from [BKMM12, Section 2.1.3]:
Definition 1.8.
A subsurface is essential if it is the disjoint union of some components of the complement of a collection of disjoint simple closed curves, so that no component is a pair of pants and no two annuli components are isotopic.
Let be the collection of (isotopy classes of) essential subsurfaces. Whenever it will not cause ambiguity, we will always say “subsurface” to mean its isotopy class. Moreover, if is an annulus, then it is the regular neighbourhood of some curve , which we call the core of .
Two subsurfaces are nested (resp. orthogonal), and we write (resp. ) if is contained in (resp. if they are disjoint). If are neither -related nor orthogonal, then they are transverse and we write .
Now let be the collection of -orbits of subsurfaces. We will denote the equivalence class of a subsurface by , and similarly if is a collection of subsurfaces we will set . Two classes are nested (resp. orthogonal), and we write (resp. ) if there exists at least one pair of representatives such that (resp. ). Notice that we are not requiring that all pairs of representatives are nested (resp. orthogonal), and indeed this is almost never the case. If are neither -related nor orthogonal, then they are transverse and we write .
Lemma 1.9.
Let be a -large displacement quotient. If then nesting and orthogonality in are mutually exclusive, meaning that if then .
Proof.
Let be two representatives such that , and let be a curve which lies in . By the assumption on the minimum displacement, for every the curve , which lies in , must intersect . This means that any representative for cannot be disjoint from , and therefore from .
Now let and be any two representatives, and let such that . Then the pair is the image under of , and by the previous argument we know that the latter two subsurfaces intersect. Hence intersects , that is, any representative for is not disjoint from any representative for . ∎
Lemma 1.10.
Let be a -large displacement quotient for some and let be a collection of pairwise orthogonal elements. Then there exist representatives which are pairwise orthogonal.
Notice that this lemma is not at all obvious: we just know that every two elements of the collection admit disjoint representatives, but this does not mean, a priori, that this conditions can all be satisfied simultaneously.
Proof.
The proof is by induction on , the base case being true by how we defined orthogonality. Thus let and let be disjoint representatives for . Moreover, let be such that (such representative exists since we know that admit disjoint representatives, and up to the -action we can assume that the representative for is ). Similarly, there exists such that .
Now fix a curve . First notice that every curve lying on is disjoint from . Moreover, is disjoint from all curves on , which are in turn disjoint from . Hence , and by the assumption on the minimum displacement we must have that . Thus is disjoint from both and . If we repeat the procedure we can find representatives for every which are disjoint from both and . Hence we can replace and with the subsurface , and now the conclusion follows by induction. ∎
2. Combinatorial rigidity
For the rest of the paper, will be a -large displacement quotient for some constant , so that all results from Subsections 1.1 and 1.2 hold. The -action on induces an action of on , defined as follows: for every equivalence classes and we can choose representatives and and set . Using that is a normal subgroup, one can see that the definition is well-posed. Moreover, the action is by simplicial automorphism, since it preserves adjacency. Thus we have a group homomorphism , where is the group of simplicial automorphisms of .
The goal of this Section is to prove the following, which is Theorem 1 from the Introduction. For the sake of simplicity, we will first state the result for surfaces of complexity at least which are not , postponing low-complexity cases to Subsection 2.1.
Theorem 2.1 (Combinatorial rigidity).
Let be a surface of complexity at least which is not , and let be a -large displacement quotient. If then the map , induced by the natural action, is an isomorphism.
For this Section only, it is convenient to see and as simplicial complexes, that is, we consider the flag simplicial complexes whose -skeleton are the curve graph and its quotient, respectively. By a result of Harer [Har86], if has complexity at least then is simply connected. We can show that is actually the universal cover of :
Lemma 2.2.
Let be a -large displacement quotient. If then the projection is a covering map.
Proof.
Just notice that, for every point , there exists an open neighbourhood whose preimage is the disjoint union of open subsets which are homeomorphic to via . Indeed, for every , choose a clique that contains , and let be any of its vertices. Then we can choose to be the interior of the subcomplex spanned by , as a consequence of Lemma 1.7. ∎
Proof of Theorem 2.1.
We first argue that the map is surjective, i.e. that, given an automorphism , we can find an element which induces . Since is the universal cover, there exists a continuous map that makes the following diagram commute:
Recall that is defined as follows: fix a vertex and a lift of . Then for every pick any path from to , and set as the endpoint of the lift of starting at . In particular, if two vertices are adjacent, then their images will either be adjacent or coincide. Moreover, the second happens precisely when , and by the assumption on the minimum displacement this cannot happen for adjacent vertices.
Hence, at the level of the -skeleton, is a simplicial map, and it is actually an automorphism since we can repeat the same argument replacing with its inverse . Hence, by Ivanov’s Theorem [Iva97, Kor99] there is an element which induces , and therefore its image induces .
Now we turn to injectivity. If an element induces the identity on when passing to the quotient, then the -action on is a covering automorphism. Now, the group of covering automorphisms is the group itself, since by Definition 1.2 the -action on is properly discontinuous. Thus there exists an element such that the composition fixes every curve of , and since has complexity at least and is not an we have that must be the identity (see e.g. the discussion in [FM12, Section 3.4]). ∎
2.1. Some low-complexity cases
In this Subsection we establish an analogue of Theorem 2.1 for some surfaces of low complexity. Let us first consider the cases when is either , or . Then the curve graph has a slightly different definition: we connect two (isotopy classes of) curves if and only if they realise the minimal intersection number among all pairs of curves on the surface, which is for and and for . The resulting simplicial complex is the Farey complex (see e.g. [Min96] for a proof), which is a triangulation of the compactification of the hyperbolic plane and therefore is simply connected. Moreover, the definition of a -large displacement quotient and the relative Lemmas from Section 1 did not assume any property on the nature of the vertices of , thus they still hold in our context. Then one gets the following:
Theorem 2.3.
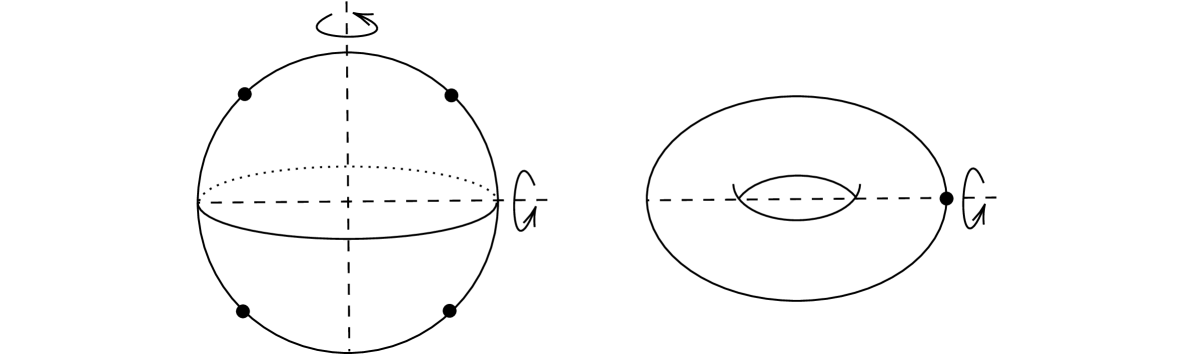
Let be either , or , let and let be a -large displacement quotient. Then the map is surjective and has finite kernel , generated by the images of the hyperelliptic involutions in Figure 1.
Proof.
For the surjectivity part, we can run the exact same proof of Theorem 2.1, which only uses that the covering space is simply connected. Moreover, the injectivity part of that proof implies that, if acts trivially on , then it is the image of an element which acts trivially on . Such must then lie in the finite subgroup generated by the hyperelliptic involutions in Figure 1 (again, this follows from e.g. [FM12, Section 3.4]). ∎
With the exact same procedure, one can get the following:
Theorem 2.4.
Let , and let be a -large displacement quotient. If then the map is surjective, and the kernel is the subgroup generated by the image of the hyperelliptic involution in Figure 1.

Finally, leaving aside the case , which is more involved since the natural map is not surjective (see the main result of [Luo00]), we are left to deal with the case . The curve complex has dimension and is not simply connected. However, we shall see that we can repeat the same procedure as in Theorem 2.1 if we show that the polyhedral complex, obtained from by gluing a cell to every -cycle, is simply connected. The latter is an unpublished result of Piotr Przytycki, which I thank for explaining its proof to me.
First, by an arc we mean the isotopy class, relative to the punctures, of a map mapping each endpoint of the interval to a puncture. For every surface with at least punctures, let be the simplicial complex whose vertices are all arcs whose endpoints are distinct punctures, and where a collection of arcs span a simplex if their interiors are pairwise disjoint.
Lemma 2.5.
If has at least two punctures, is simply-connected.
The same proof will yield that is contractible, though we will not need it.
Proof.
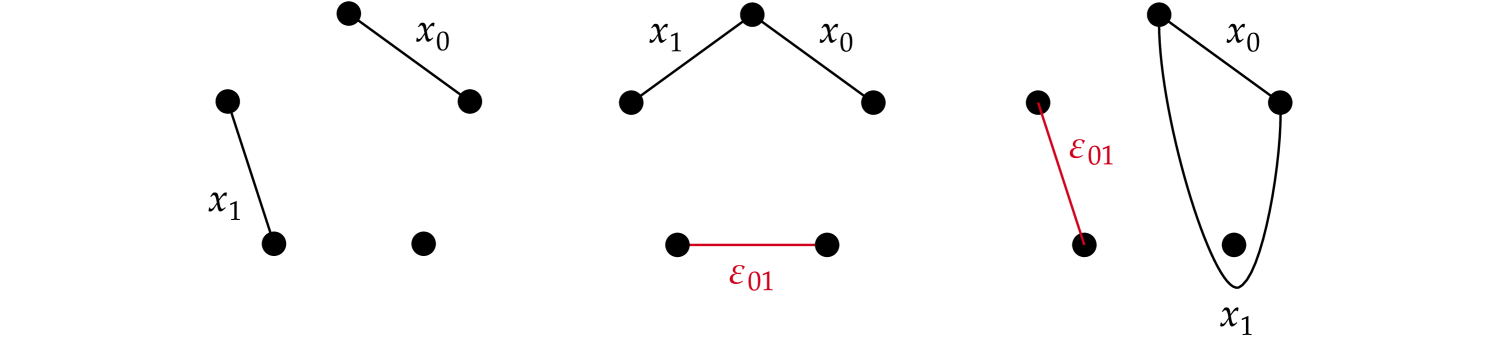
This fact is proven as [Sch20, Claim 3.17], but we spell out the details for clarity. Let be a simplicial loop, and fix an arc . If every other arc is disjoint from , then we can connect to , and this defines an extension of to some triangulation of the disk .
Thus, suppose that , where is the number of intersection of two representatives of and in minimal position. Fix and endpoint of , and let be the first arc one meets when travelling along starting from . Let be the path along from to the first intersection to , and let and be the essential arcs obtained as the boundaries of a regular neighbourhood of . Since has distinct endpoints, one of its endpoints is not , and therefore one of the new arcs, say , has distinct endpoints. Notice moreover that is disjoint from , and if was disjoint from then it is also disjoint from , because we choose to have the closest intersection to . Thus, we can replace with and obtain a loop , which is homotopic to but is such that . Then we conclude by induction on . ∎
Definition 2.6.
Let . By a pentagon we mean a -cycle . Let be the polyhedral complex obtained from by gluing a -cell to every pentagon.
Lemma 2.7 (Przytycki).
The complex is simply connected.
Proof.
First, notice that can be seen as a non-complete subgraph of , by mapping every curve to the unique arc in the twice-punctured disk that cuts out on . The map is bijective at the level of vertices, but not at the level of edges since in we allow two arcs to have the same endpoints. Notice moreover that, if the union of five arcs is a pentagon on (meaning that there is a cyclic ordering such that each arc intersects only the previous and the following, and only at a single endpoint), then the preimages under of these arcs form a pentagon, in the sense of Definition 2.6.
Now let be a simplicial loop, whose image lies in the -skeleton . The image can be filled with triangles, since is simply connected. Let be the vertices of such a triangle . If and have disjoint endpoints, then the corresponding curves and are disjoint, so that they are connected by an edge in . Otherwise, there exists a unique arc such that is disjoint from both and , as in Figure 2 (it is the only arc with distinct endpoints in the complement of ).
Now by construction, the curves
form a loop in . Therefore we are left to prove that can be filled with finitely many pentagons.
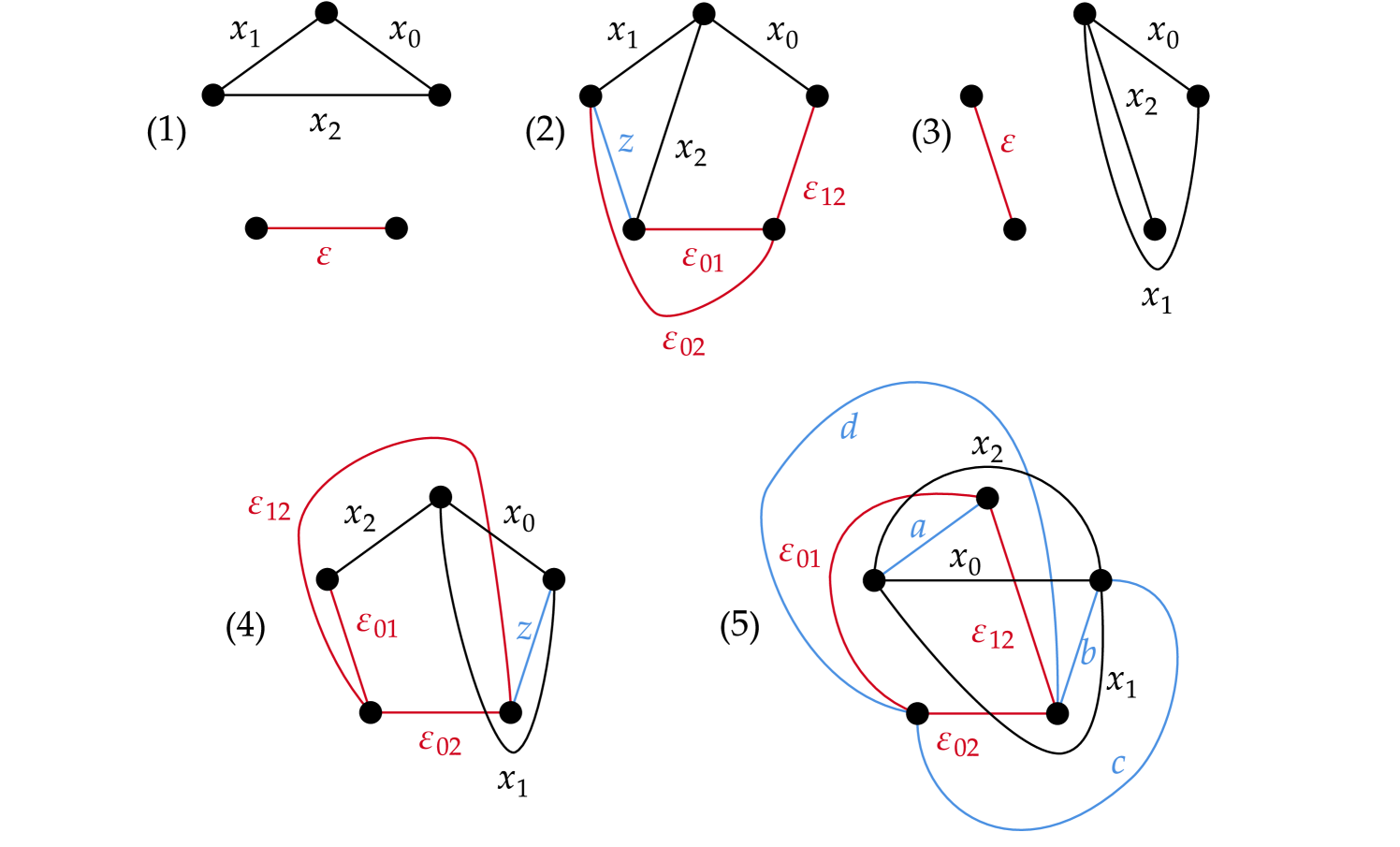
If there is a pair of arcs, say, , , which have distinct endpoints, then must share an endpoint with each of them. This shows that has precisely vertices, and therefore is filled by a pentagon in . Otherwise, suppose that all pairs , share an endpoint, that is, has six vertices. There are five possible cases, as in Figure 3.
Let us analyse all of them separately.
-
(1)
The -arcs coincide, thus is a tripod.
-
(2)
Add the arc in the Figure. Now form a pentagon, as well as . Therefore we can fill with the preimage under of these arcs, which is a union of two pentagons joined along two edges.
-
(3)
The -arcs coincide, so we are in the same situation as case 1.
-
(4)
Similarly to case 2, adding creates two pentagons.
-
(5)
This time we need four auxiliary curves, in order to form four pentagons , , and .
∎
Now we are ready to prove quasi-isometric rigidity for :
Theorem 2.8.
Let , and let be a -large displacement quotient. If then the map is an isomorphism.
Proof of Theorem 2.8.
Notice first that pentagons in can be lifted and pentagons in can be projected isometrically, as a consequence of Lemma 1.7. Thus we can consider the quotient , which is again a polygonal complex. Moreover, any automorphism maps pentagons to pentagons, and therefore extends to an automorphism of . Now we can argue as in Theorem 2.1, this time using the covering , to show that the map is an isomorphism (again, injectivity follows from [FM12, Section 3.4]). ∎
3. Quasi-isometric rigidity
This section is devoted to the proof of Theorem 2 from the Introduction, that is quasi-isometric rigidity of certain large displacement quotients, which admit a particular hierarchically hyperbolic group (HHG) structure (see Theorem 3.8 for the exact statement). The idea is to show that, from any self-quasi-isometry of a HHG satisfying some additional assumptions, one can extract an automorphism of a certain graph, which in our case will coincide with . Then we will be able to apply the combinatorial rigidity results from Section 2 to produce a candidate element , and with a little more effort we will show that coarsely coincides with the left multiplication by . Once again, I am grateful to Jason Behrstock, Mark Hagen, and Alessandro Sisto for their contribution, in particular to the proof of Lemma 3.15.
3.1. Background on hierarchical hyperbolicity
First, we recall the intuition behind some notions from the world of hierarchically hyperbolic spaces and groups, first introduced by Behrstock, Hagen, and Sisto in [BHS17b]. We refer to [BHS19] for the details of the definitions.
3.1.1. HHS and HHG
A hierarchically hyperbolic space (HHS for short) is a metric space that comes with certain additional data, most importantly a family of uniformly hyperbolic spaces , called coordinate spaces, and uniformly coarsely Lipschitz maps , which shall be thought of as coordinates for points in . For mapping class groups, these are curve graphs of subsurfaces and maps coming from subsurface projections. Moreover, the domain set , that is, the set which indexes the family of coordinate spaces, has a partial ordering , called nesting, with a unique maximal element, and an equivalence relation , called orthogonality. For mapping class groups, these are containment and disjointness of subsurfaces (up to isotopy). When two domains of are not - nor -related, one says that they are transverse, and one writes . Finally, whenever there is a projection , which for mapping class group is again defined using subsurface projection.
An action of a finitely generated group on a hierarchically hyperbolic space is the data of:
-
•
an action by isometries;
-
•
an action , preserving nesting and orthogonality;
-
•
for every and every , an isometry .
Moreover, one requires that the two actions are compatible, meaning that for every and every non-orthogonal domains the following diagrams commute:
We will often slightly abuse notation and drop the subscript for the isometries . If the action on is metrically proper and cobounded, and the action on is cofinite, then is a hierarchically hyperbolic group (HHG for short), and any quasi-isometry between and given by the Milnor-Švarc lemma can be used to endow with the HHS structure of .
For later purposes, we point out that hierarchically hyperbolic groups are examples of asymphoric HHS, in the sense of [BHS21, Definition 1.14], though we will not need the actual definition of this property.
3.1.2. Product, flats, orthants
The idea of orthogonality is that it corresponds to products, in the following sense. Given any , there is a corresponding space associated to it, which is quasi-isometrically embedded in ( is a HHS itself with domain set , and in mapping class groups these essentially correspond to mapping class groups of subsurfaces). Given a maximal set of pairwise orthogonal elements of , there is a corresponding standard product region which is quasi-isometric to the product of the (think of a Dehn twist flat as, coarsely, a product of annular curve graphs).
Moreover, inside and the s there are special (uniform) quasi-geodesics, called hierarchy paths, which are those that project monotonically (with uniform constants) to all . Similarly, there are hierarchy rays and hierarchy lines (which are quasigeodesic rays and lines, respectively). Given a product region and hierarchy lines (resp., rays) in some of the , the product region contains a product of those (where for the indices for which a line/ray has not been assigned one chooses a point in instead). This is what we will refer to as standard -flats (resp., orthants), where is the number of lines/rays. The support of a standard -flat (resp., orthant) is the set of for which a line/ray has been assigned. Related to this, a complete support set is a subset of pairwise orthogonal domains with all unbounded, and with maximal possible cardinality among sets with these properties. This definition is relevant here as , which is called the rank of , is then the maximal dimension of standard orthants (if the are not only unbounded, but also have non-empty Gromov boundary, as will be the case for us). Moreover, in this case points in the Gromov boundary each determine a hierarchy ray, and similarly pairs of points determine hierarchy lines. In particular, for every complete support set and for every choice of distinct points there exists an associated standard -flat , which is the product of the hierarchy lines in whose projections to have endpoints . We will refer to standard -flats (resp. standard -orthants) simply as standard flats (resp. standard orthants).
The following Lemma, which follows from carefully inspecting the proofs of [BHS21, Lemmas 4.11 and 4.12], describes the (coarse) intersection of standard flats and orthants. Recall that, given subsets of a metric space , the coarse intersection , if well-defined, is a subspace of within bounded Hausdorff distance of all intersections of their -neighbourhoods, for sufficiently large.
Lemma 3.1 (Coarse intersection of standard orthants and flats).
Let be an asymphoric HHS of rank .
-
•
Let be standard orthants in with supports and . Then is well-defined, and coarsely coincides with a standard –orthant whose support is contained in .
-
•
Let be standard orthants in with supports and . Then is well-defined, and coarsely coincides with a product , where varies in and every is either a point, a standard -orthant or a standard -flat supported on .
3.2. HHG structures inherited from the surface
From now on, we will further restrict our attention to those large displacement quotients admitting a HHG structure whose “interesting” domains are orbits of subsurfaces:
Convention 3.2 (Surface-inherited HHG structure).
is a -large displacement quotient for some , and it admits a HHG structure with the following properties:
-
•
The domain set is , where is the collection of -orbits of essential subsurfaces.
-
•
Two domains are nested (resp. orthogonal) if and only if they admit representatives which are nested (resp. orthogonal).
-
•
The -maximal element of is (the -orbit of) the whole surface , and its coordinate space, which we refer to as the top-level coordinate space, is -equivariantly quasi-isometric to . In particular, is hyperbolic.
-
•
Whenever is not the -maximal element, the coordinate space associated to is . Furthermore, the quotient projection restricts to a quasi-isometry , for any representative . Here is the usual curve graph of , unless has complexity and is isomorphic to the Farey complex, or is an annulus and is its annular curve graph.
-
•
There exists a constant such that, for every , either or is not orthogonal to any other element of .
Here are some examples of quotients with a surface-inherited structure.
Example 3.3.
itself has a HHG structure whose domain set coincides with and whose coordinate spaces are curve graphs of subsurfaces (see e.g. [BHS19, Theorem 11.1]).
Example 3.4 (Hierarchically hyperbolically embedded subgroups).
Let be a finitely generated subgroup of which is hierarchically hyperbolically embedded, as defined in [BHS17a, Definition 6.1] building on the notion of hyperbolically embedded subgroups from [DGO17, Definition 2.1]. Lemma 3.5 describes conditions on a subgroup ensuring that the quotient by the normal closure of satisfies Convention 3.2.
Lemma 3.5.
Let be a finitely generated subgroup which is hierarchically hyperbolically embedded. There exists a finite set such that, if a normal subgroup avoids and is hyperbolic, then the quotient by the normal closure of satisfies Convention 3.2.
Proof.
Consider any Cayley graph for , with respect to any finite set of generators. As noted in [BHS17a, Remark 6.3], the orbit maps of to are quasi-isometric embeddings (actually, the image is also quasi-convex). Hence there exists such that, denoted by the ball of radius centred at the identity of , if then acts on with minimum displacement at least . This in turn means that, for - to act with large minimum displacement, it suffices that it avoids finitely many elements, since balls in a Cayley graph of a finitely generated group are finite.
Now we claim that, if avoids a possibly bigger finite set, then its normal closure acts on with minimum displacement at least as well. This follows from results of [DGO17] on hyperbolically embedded subgroups, but we can give a proof based on the machinery from [CM22]. There the authors take as input our setting and output a projection complex, which we shall think of as the data of:
-
•
a graph , whose vertices correspond in our case to orbits of the form for all and for a fixed basepoint ;
-
•
a notion of projection between vertices of , which for us is given by projections onto the quasi-convex subsets ;
-
•
an action , such that the stabiliser of is precisely (this follows from [DGO17, Theorem 2.14], where is described as an infinite free product of conjugates of ).
An example of the construction of the projection complex for the case when is generated by a pseudo-Anosov mapping class can be found in [CM22, Section 8.1].
Now, for every there exists such that the orbit is uniformly close to , since and the action of on the curve graph is cofinite. Now let , and we want to say that . Notice that we can think of and as vertices of . Therefore, by [CM22, Proposition 3.2] one of the following must hold:
-
•
fixes , and therefore it belongs to . In particular, has minimum displacement at least , since we already know that every non-trivial element in does and minimum displacement is preserved under conjugation.
-
•
fixes , and for the same reason it has minimum displacement at least .
-
•
There exists a third vertex of , that is, a third orbit , on which and have distant projection. Now, the projection of is close to the projection of , and similarly projects close to . Therefore and have distant projections to , and in turn this means that and are far from each other in .
Now, [BHS17a, Theorem 6.2] states that, if avoids a (possibly larger) finite set and is hyperbolic, then admits a hierarchically hyperbolic structure with the following properties:
-
•
The index set is ;
-
•
Orthogonality and nesting in correspond to orthogonality and nesting between representatives;
-
•
If is not the maximal element, then is quasi-isometric to via the projection map, for any representative for ;
-
•
If is of the form then has no orthogonal, and is isometric to ;
-
•
The top-level coordinate space is obtained from after coning off every -orbit.
Thus all requirements of Convention 3.2 are satisfied, except for the quasi-isometry type of the top-level coordinate space. Now one can apply the procedure from [ABD21, Theorem 3.7] to remove the domains without orthogonals, and get a new structure such that:
-
•
The new index set coincides with the maximal element, together with all elements admitting an orthogonal domain with unbounded coordinate space. Hence ;
-
•
Orthogonality and nesting are inherited from the original structure;
-
•
If is not the maximal element, then is unchanged;
-
•
The top-level coordinate space is the space obtained from after coning off the factors for every non-maximal . These factors correspond to the stabilisers of the action of on . Therefore, by a version of the Milnor-Švarc Lemma described in e.g. [CC07, Theorem 5.1], is quasi-isometric to .
Therefore the new structure satisfies Convention 3.2. ∎
Now we can finally prove that the quotient by a high enough power of a pseudo-Anosov element is a large displacement quotient:
Corollary 3.6.
Let be pseudo-Anosov element. There exists such that, if is a multiple of , then the quotient by the normal closure of satisfies Convention 3.2, and in particular is a -large displacement for some .
Proof.
The elementary closure of a pseudo-Anosov element , that is, the unique maximal virtually-cyclic subgroup containing , is hierarchically hyperbolically embedded (this ultimately follows from [DGO17, Theorem 6.50]). Moreover, by inspection of the proof of [DGO17, Lemma 6.5], the cyclic group generated by has finite index in , therefore there exists such that is normal in . We can further assume that avoids the finite set given by Lemma 3.5. Hence, the hypothesis of Lemma 3.5 are satisfied by whenever is a non-trivial multiple of . ∎
For later purposes, we also notice that the existence of a surface-inherited HHG structure implies that is unbounded, though in all known examples this is already true for less artificial reasons:
Lemma 3.7.
Let be either a surface of complexity at least , and let satisfy Convention 3.2. Then is unbounded.
Proof.
By [PS23, Theorem 3.2], with holds for any HHG, there exists a maximal family of pairwise orthogonal domains with unbounded coordinate spaces, such that any other domain with unbounded coordinate space is nested in one of the . If one of the is the -maximal element then we are done, because then its coordinate space, which by Convention 3.2 is quasi-isometric to , must be unbounded.
Otherwise, pick an annulus , and let be the subsurface obtained from after removing all connected components which are pants. Since the complexity is at least , is actually an element of , which is nested only inside and itself. Moreover, if we denote its -orbit by , then is quasi-isometric to and is therefore unbounded. Thus, without loss of generality , and since is not the maximal element, we must have that . In particular, since any other is orthogonal to , the collection can consist only of and .
Now it is enough to produce an annulus whose -orbit is not nested in either or , and this will lead to a contradiction because is unbounded by our Convention. Let be the core of , which is also the boundary of inside , pick a curve at distance from , and let be the annulus with core . Then all -translates of must be at distance at least from , by the assumption on the minimum displacement, and this means that all -translates of must cross . In particular cannot be nested in either or . ∎
3.3. Statement of the results
The goal of this Section is to prove that, if satisfies Convention 3.2, then it is quasi-isometrically rigid in the following sense. Recall that two groups and are said to be weakly commensurable if there exist two finite normal subgroups and such that the quotients and have two finite index subgroups that are isomorphic.
Theorem 3.8 (Quasi-isometric rigidity).
Let be a surface of complexity at least which is not a torus with two punctures, and let satisfy Convention 3.2. Then is quasi-isometrically rigid, meaning that if a finitely generated group and are quasi-isometric then they are weakly commensurable.
As we will see, the assumption on the topological type of is needed to ensure that every automorphism of is induced by a mapping class, as a consequence of Theorems 2.1, 2.4 and 2.8. Moreover, we require the complexity to be at least , so that in we can find “Dehn Twist flats”, that is, standard flats supported on the orbits of pairwise disjoint annuli, of dimension at least . See Lemma 3.20 for more details.
Since itself is a -large displacement quotient for every choice of , as pointed out in Example 1.3, we also recover quasi-isometric rigidity of mapping class groups:
Corollary 3.9 (QI-rigidity of ).
Let be a surface of complexity at least which is not a torus with two punctures. Then is quasi-isometrically rigid, meaning that if a finitely generated group and are quasi-isometric then they are weakly commensurable.
Moreover, in view of Lemma 3.5 we get the following:
Corollary 3.10.
Let be a surface of complexity at least which is not a torus with two punctures. Let be a hierarchically hyperbolically embedded subgroup, let and let be the normal closure of . There exists a finite set such that, if avoids and is hyperbolic, then is quasi-isometrically rigid, meaning that if a finitely generated group and are quasi-isometric then they are weakly commensurable.
3.4. Quasi-isometries induce maps on hinges
For this Subsection only, we will work in the general framework of an asymphoric HHS of rank . We will show that, if satisfies some additional properties (see Assumptions (A) - (F)), then any self-quasi-isometry of induces an automorphism of a certain graph, which we shall think of as encoding certain standard flats and their intersections.
Recall that a complete support set is a collection of pairwise orthogonal domains with unbounded coordinate spaces, with maximal cardinality among all such collections.
Definition 3.11 ([BHS21, Definition 5.2]).
A hinge is a pair where belongs to a complete support set and . We say that is the support of . Let be the set of hinges.
As in [BHS21, Definition 5.3], one can associate to a hinge a standard -orthant, denoted . This is a hierarchy ray whose projection to is a quasigeodesic ray asymptotic to , and whose projections to all other coordinate spaces are uniformly bounded. Another property of , stated in [BHS21, Remark 5.4], is that if are two different hinges then .
Let us introduce the first set of hypothesis on .
Assumption A.
For every which belongs to a complete support set, the Gromov boundary of its coordinate space consists of at least points.
Definition 3.12 (Good domain).
A domain is good if there exist two complete support sets whose intersection is . Let be the set of good domains, and let be the set of hinges supported on good domains.
Assumption B.
For every which are orthogonal, there exist two support sets whose intersection is .
Assumption C.
For every which belongs to a complete support set, there exists a (possibly empty) collection of good domains and two complete support sets whose intersection is .
Remark 3.13.
Let be a quasi-isometry. With the same arguments as in the first half of the proof of [BHS21, Theorem 5.7], one can define a map by mapping to the unique hinge such that . Moreover, by inspection of the construction one sees that is itself good, since arises as the coarse intersection of two standard orthants (whose supports must therefore coincide only on the support of by Lemma 3.1). Hence maps to itself, and therefore is a bijection whose inverse is the map , induced by any quasi-inverse for .
Definition 3.14.
We say that two hinges are co-supported if they are supported on the same domain, i.e. if the union of their hinge rays is (coarsely) a 1-dimensional standard flat. We say that two hinges are orthogonal if they are supported on orthogonal domains.
Lemma 3.15 (Behrstock, Hagen, Sisto).
Proof.
Let and . By Assumption (B) there exist two standard flats whose coarse intersection is a standard 2-flat containing and . Let be the orthant spanned by and in this standard 2-flat.
As a consequence of the Quasiflats Theorem [BHS21, Theorem A] and of Lemma 3.1, is a union of standard 2-orthants, whose “boundary” 1-orthants, which we call coordinate rays, can be ordered cyclically. Moreover, must arise as some coordinate ray, since it coarsely coincides with some hinge , and if a hinge is contained in a standard 2-orthant then it must be one of its boundary 1-orthants by [BHS21, Lemma 4.11]. The same is true for .
Now, if and are adjacent in the cyclic ordering, then they belong to a common 2-orthant, and therefore they are orthogonal. Thus suppose that there is a coordinate ray between and , and let be its support.
If is good then we can proceed as in the proof of [BHS21, Theorem 5.7] to get a contradiction. Indeed, in this case must coincide with some hinge ray , which belongs to but lies at infinite Hausdorff distance from both and , and this contradicts [BHS21, Lemma 4.11].
Then we can assume that no ray between and is supported on a good domain, and in particular that is not good. By Assumption (C) there exists a collection of good domains and two complete support sets whose intersection is .
Hence, there exist two standard flats whose intersection is a flat supported on and containing . Now consider . This coarse intersection is well-defined, since both and are finite unions of standard orthants by the Quasiflat Theorem, and the coarse intersection of standard orthants and flats is well-defined by Lemma 3.1. Moreover, let , which is a union of standard 1- and 2-orthants supported on (again, this follows from combining the Quasiflat Theorem, applied to and , and Lemma 3.1). Now, contains the ray , which lies inside but cannot coarsely coincide with nor with , since their image lie at infinite Hausdorff distance. Therefore, must contain the whole 2-orthant . In turn, this means that must contain all 2-orthants of which lie between and in the cyclic ordering, and moreover the support of every such 2-orthant must be contained in .
Now, since and are boundary 1-orthants of some 2-orthants of , their supports must belong to , and therefore they are either orthogonal or co-supported. ∎
For the rest of the Section, we will work under the following additional assumptions:
Assumption D.
If is a good domain, then .
Assumption E.
For every two good domains there exists a good domain which is orthogonal to but not to . In other words, every good domain is uniquely determined by the set of good domains which are orthogonal to it.
Lemma 3.16.
Proof.
Let be two co-supported good hinges. For every good hinge which is orthogonal to we can consider its preimage . By Lemma 3.15, which also applies to (again, because it coincides with the map for any quasi-inverse for ), we have that and are either orthogonal or co-supported. Moreover, by Assumption (D) the unique hinge which has the same support of is , thus is orthogonal to and therefore also to . Then again Lemma 3.15 tells us that and are either co-supported or orthogonal.
We can repeat the argument for every good hinge which is orthogonal to , and we get that either has the same support of some , and therefore is orthogonal to , or and are orthogonal to the same hinges, and therefore they are co-supported by Assumption (E). ∎
To conclude the proof, we also need good domains to satisfy the following strengthening of Definition 3.12, which roughly says that good hinges arise as intersection of “good” standard orthants:
Definition 3.17 (Very good domain).
A domain is very good if there exist two complete support sets, made of good domains, whose intersection is .
Assumption F.
Good domains are very good.
Lemma 3.18.
Proof.
We can give a simplicial graph structure, by saying that two hinges are adjacent if and only if they are orthogonal or co-supported. Combining Remark 3.13, Lemma 3.15, and Lemma 3.16, we obtain that induces a simplicial automorphism of . With a slight abuse of notation, we will keep denoting such automorphism as , since at the level of vertices it maps every good hinge to .
Now notice that any maximal clique of is the (infinite) subgraph spanned by all hinges supported on some complete support set, made of good domains. Moreover, we claim that two good hinges and are co-supported if and only if they belong to the same maximal cliques. Indeed, if two hinges are co-supported then they clearly belong to the same maximal cliques; conversely, if and are supported on , respectively, then one of the following holds:
-
•
, and therefore and cannot belong to the same maximal cliques since they are not adjacent in ;
-
•
, and in view of Assumption (F) we can find a complete support set, made of good domains, which contains but not .
Since we just showed that being co-supported is a purely combinatorial property, it must be preserved by the automorphism . Moreover, the same argument works for the inverse , hence two good hinges are co-supported if and only if and are co-supported. This also implies that two good hinges are orthogonal if and only if and are orthogonal.
Now, induces an automorphism of as follows. For every choose a hinge supported on , and set as the support of . This map is well-defined since maps co-supported hinges to co-supported hinges, and it preserves orthogonality since does. ∎
The last Lemma gives a uniform bound between the image of a maximal flat, supported on good domains, and the maximal flat supported on the image of the supports. In the case of , this will tell us that the quasi-isometry permutes “Dehn twist flats”, up to uniformly bounded distance.
Lemma 3.19 (Flats go to flats).
Proof.
One can argue as in [BHS21, Lemma 5.9], whose proof only relies on asymphoricity of and the fact that maps hinges on the same support to hinges on the same support. ∎
3.5. Application to large displacement quotients
Now let be a surface of complexity at least . It is easy to see that, if belongs to a complete support set for , then is either an annulus, a or a . Moreover, if has complexity one then every complete support set containing must also contain all its boundary annuli, thus is not good; on the other hand, annuli are very good, since every annulus can be obtained as intersection of two pants decompositions, that is, two collections of pairwise disjoint annuli. Finally, the rank of is precisely the complexity of .
The next lemma shows that, if satisfies Convention 3.2, then it fits the framework of Subsection 3.4:
Lemma 3.20.
Proof.
First, let be a complete support set for . The set of all curves lying on has diameter at most inside , hence the subsurfaces must belong to pairwise distinct orbits by the assumption on the minimum displacement. Moreover, are again pairwise orthogonal, by how orthogonality in is defined, and have unbounded coordinate spaces, since by assumption is quasi-isometric to . Hence the projection of a complete support set for is a support set for with the same number of domains, and in particular the rank of is at least .
Conversely, let be a complete support set. If belonged to then would only consist of , because elements of with unbounded coordinate spaces have no orthogonals by Convention 3.2. Then could not be complete, since . Hence, for every , we have that , and by Lemma 1.10 we can find pairwise disjoint representatives . Thus is at most , and if we combine this with the previous inequality we get . We just proved that every complete support set for is of the form , for some complete support set for .
Now, we claim that is a good domain if and only if it is the orbit of an annulus. Indeed, if is the orbit of an annulus we can find two pants decompositions and whose intersection is . Since all curves in lie in the ball of radius centred at inside , the assumption on the large displacement implies that any two domains in lie in different -orbits. Hence . On the other hand, if is the class of a subsurface of complexity one, then every complete support set containing lifts to a complete support set containing , which must also contain the boundary annuli of . Hence must contain the -orbit of the boundary annuli of .
We conclude the proof by checking the Assumptions:
(A) Whenever belongs to a complete support set, is isometric to for any of its representatives , and in particular has at least two points at infinity.
(B) For every two , which lift to disjoint annuli , we can find two pants decompositions and whose intersection is . Moreover, any two annuli in belong to different -orbits, because their core curves are disjoint, so is the intersection of and .
(C) Let belong to a complete support set. If is not good, we can pick one of its lift and find two complete support sets and whose intersection is , where are the boundary annuli of . Now, all curves in lie in the ball of radius centred at any curve which lies in . Therefore, by the assumption on the large displacement, any two domains in must belong to different -orbits, and in turn this means that is the intersection of and .
(D) If is good then is quasi-isometric to an annular curve graph, hence .
(E) It is enough to prove that, if have the same link inside , i.e., if they are adjacent to the same vertices, then they coincide. Indeed, the subgraph spanned by has diameter at most , and therefore can be lifted by Lemma 3.16. Thus we get two lifts such that is the lift of , and therefore coincides with . Now we are left to prove that, if two curves have the same link in , then they must coincide. Now, if the curves are disjoint then , and we are done. Otherwise, let be a component of which is not a pair of pants (here we are using that has complexity at least ), and let be the subsurface projection of inside . By applying a partial pseudo-Anosov of to we can find a curve inside which crosses , and therefore also .
(F) As we saw before, every which is the orbit of an annulus arises as the intersection of two complete support sets which come from two pants decompositions. Therefore good domains are very good. ∎
Now, good domains correspond to orbits of annuli, and orthogonality corresponds to having disjoint representatives. Hence, as a consequence of Lemma 3.18 we get:
Corollary 3.21.
Let be a surface of complexity at least , and let satisfy Convention 3.2. Every quasi-isometry induces an automorphism of .
Now we are finally ready to prove quasi-isometric rigidity:
Proof of Theorem 3.8.
Let be a surface of complexity at least which is not a , and let satisfy Convention 3.2. By [MS23, Lemma 9.15], which follows from standard arguments (see e.g. [Sch95, Section 10.4]), to prove quasi-isometric rigidity of it is enough to verify that, for every , there exists such that:
-
(a)
Every -self-quasi-isometry of lies within distance from the left multiplication by some element of ;
-
(b)
If a -self-quasi-isometry of lies within finite distance from the identity, then it lies within distance from the identity.
a Let be a -quasi-isometry, and let be the induced automorphism of . By either Theorem 2.1, Theorem 2.4 or Theorem 2.8, according to the homeomorphism type of , we get that is induced by some element . Moreover, by Lemma 3.19 there exist a constant such that, whenever is a maximal collection of pairwise orthogonal orbits of annuli, maps the standard flat within Hausdorff distance at most from , which in turn is within Hausdorff distance at most from . Therefore .
Now, to show that and uniformly coarsely coincide it is enough to say that, for every point , there exist two standard flats , supported on orbits of annuli, whose coarse intersection is within finite Hausdorff distance from , and all constants do not depend on . Indeed, if this is the case then and should uniformly coarsely agree on the coarse intersection , and therefore on . In turn, since acts transitively on itself and maps orbits of annuli to orbits of annuli, it is enough to exhibit a pair of standard flats, supported on orbits of annuli, whose coarse intersection is bounded.
As a consequence of Lemma 3.1, if is supported on , is supported on , and , then the coarse intersection is bounded. Thus, we are left to find two collections and of pairwise orthogonal orbits of annuli whose intersection is empty. By Lemma 1.7, it is enough to find two pants decompositions and such that and the subgraph of spanned by the core curves of has diameter at most . This is easy: just pick any pants decomposition , and then replace every with an annulus which only intersects . This proves Item a.
b Let be a -quasi-isometry which lies within finite distance from the identity. By Item a we know that lies within distance from the left multiplication by some , which depends only on the induced map . In turn is induced by , thus if we show that this map is the identity then can be chosen to be the identity, and the corollary follows. Now, for every good hinge , was defined in Remark 3.13 as the unique hinge such that . But then, since we must have that , that is, is the identity. ∎
4. Algebraic rigidity
We end the paper by showing that, whenever satisfies Convention 3.2, then the automorphism group of and its abstract commensurator are both isomorphic to itself, via the action of on itself by conjugation. This is Theorem 3 from the introduction, which is covered by Corollaries 4.9 and 4.10 below. The main result of this Section is the following:
Theorem 4.1.
Let be either a surface of complexity at least (excluding the case ) or a , and let satisfy Convention 3.2. Then any isomorphism between finite index subgroups of is the restriction of an inner automorphism.
We first recall some definitions and a theorem from [AMS16].
Definition 4.2.
Two elements and of a group are commensurable, and we write , if there exist , such that (that is, if they have non-trivial conjugate powers).
Definition 4.3.
If a group acts by isometries on a hyperbolic space , an element is loxodromic if for some the map , is a quasi-isometric embedding. In the same setting, an element is weakly properly discontinuous, or WPD, if for every and any there exists such that whenever we have
We denote by the set of loxodromic WPD elements.
The following result is a special case of [AMS16, Theorem 7.1]. Roughly speaking, the theorem says that if is a subgroup of and both act “interestingly enough” on some hyperbolic space, then any homomorphism is either (the restriction of) an inner automorphism or it maps some loxodromic WPD to an element which is not commensurable to it.
Theorem 4.4.
Let be a group acting coboundedly and by isometries on a hyperbolic space , with loxodromic WPD elements. Let be a non-virtually-cyclic subgroup such that , and let be the unique maximal finite subgroup of normalised by , whose existence is proven in [AMS16, Lemma 5.6]. Let be a homomorphism such that whenever then . If then is the restriction of an inner automorphism.
Our proof of Theorem 4.1 will be very similar to that of [MS23, Theorem 10.1], from which we now abstract a general statement, both for clarity and for later purpose. Recall that a finitely generated group is acylindrically hyperbolic if it is not virtually-cyclic and it acts coboundedly and by isometries on a hyperbolic space , with loxodromic WPD elements.
Theorem 4.5 (Algebraic rigidity from quasi-isometric rigidity).
Let be an acylindrically hyperbolic group. Suppose that has no non-trivial finite normal subgroups, and that every self-quasi-isometry of is within bounded distance from the left multiplication by some element of . Then any isomorphism between finite index subgroups of is the restriction of an inner automorphism.
Proof.
We just need to verify that the hypotheses of Theorem 4.4 are satisfied for any isomorphism between subgroups of finite index of . By definition of acylindrical hyperbolicity, the hypotheses on the action are satisfied. Moreover, is not virtually-cyclic, and so also is not because its index is finite.
Next, we show that has the required commensurating property, that is, for every we have that . Indeed, can be extended to a quasi-isometry (for example, by precomposing with any closest-point projection ). Hence we can find an element whose left-multiplication is uniformly close to . From here, one can argue as in [MS23, Lemma 10.5], which only uses some basic properties of Cayley graphs of finitely generated groups, to prove that whenever has infinite order, and in particular whenever is loxodromic WPD.
We are left to prove that . In view of Lemma [MS23, Lemma 10.6], which holds for any acylindrically hyperbolic group, this follows from the fact that , i.e. that has no non-trivial finite normal subgroups. ∎
Thus to prove Theorem 4.1 we reduced ourselves to verify the hypotheses of Theorem 4.5 when is , and is as in Theorem 4.1. We know that is quasi-isometrically rigid, by Theorem 3.8, so just need to show that it is acylindrically hyperbolic (Lemma 4.6) and that it has no non-trivial finite normal subgroups (Lemma 4.7). For the first result, we can actually make milder requirements on the topological type of :
Lemma 4.6.
Let be either a surface of complexity at least , and let satisfy Convention 3.2. Then is acylindrically hyperbolic.
Proof.
First of all, is non-virtually-cyclic. Indeed, if are disjoint curves, then the subgroup generated by the Dehn twists and around and , respectively, intersects trivially, since it fixes and therefore its minimum displacement is zero. Therefore injects in , which is therefore non-virtually-cyclic.
Now, acts coboundedly on , because the action is induced by the cobounded action of over . Moreover, our Convention 3.2 says that is hyperbolic and -equivariantly quasi-isometric to the main coordinate space of the HHG structure. Therefore, by [BHS17b, Corollary 14.4] the action admits loxodromic WPD elements provided that is unbounded, as we noticed in Lemma 3.7. ∎
Lemma 4.7.
Let be either a surface of complexity at least (excluding the case ) or a , and let satisfy Convention 3.2. Then has no non-trivial finite normal subgroup.
Proof.
Let be a finite normal subgroup, and by contradiction let be a non-trivial element. If acts trivially on then is the identity, by the injectivity part of either Theorem 2.1 or Theorem 2.8. Thus let be a vertex which is not fixed by . Let be a representative for , let be a representative for , let be the Dehn Twist around , and let be its image in the quotient. Since is finite, we can find such that . Hence, denoting by the Dehn twist around , and by the identity element of the quotient, we have
where we used how Dehn twists behave under conjugation. In other words, we have that .
Now, if and are adjacent in , then we could have chosen representatives and such that and are disjoint curves. Then cannot be an element of , since it does not have positive displacement.
Hence suppose that and are not adjacent in . Let be the annulus with core curve , let be its -orbit and let be the projection given by the HHG structure. Notice that acts on , since fixes .
Now, , so it must act as the identity on , and in particular it must fix . Hence, when we project to we get
where we used that fixes . Moreover
where we used that projections in a HHG are equivariant with respect to the action of the group. Hence, the action of on must fix the element .
However, the action of on was defined via the action of on , so that the following diagram commutes:
Here the vertical arrows are the restriction to of the quotient projection
Such restriction is a quasi-isometry by Convention 3.2. Hence, no power of can fix a point in , since the action of the Dehn twist on its annular curve graph is loxodromic. ∎
As a by-product of Theorem 4.1, we get that any automorphism of is the conjugation by some element . The following lemma states that such is also unique:
Lemma 4.8.
Let be either a surface of complexity at least (excluding the case ) or , and let satisfy Convention 3.2. Then is centerless.
Proof.
By either Theorem 2.1 or Theorem 2.8, it is enough to show that acts as the identity on . Notice that commutes with the image of the Dehn twist for any curve . In particular, by how Dehn twists behave under conjugation, we have that , where is any representative for . Now one can argue as in the proof of Theorem 4.1 to get that , and the conclusion follows. ∎
Corollary 4.9.
Let be either a surface of complexity at least (excluding the case ) or , and let satisfy Convention 3.2. Then the map , which maps an element to the conjugation by , is an isomorphism. Therefore is trivial.
Finally, we recall the definition of the abstract commensurator of a group . Consider the set of all isomorphisms between finite-index subgroups of . Let be the quotient of this set by the following equivalence relation: two isomorphisms are identified if they coincide on a finite index subgroup of . Then can be endowed with a group structure, induced by the composition. Our final result shows that is “the smallest possible”:
Corollary 4.10.
Let be either a surface of complexity at least (excluding the case , or and let satisfy Convention 3.2. Then the map , which maps an element to the conjugation by , is an isomorphism.
Proof.
The map is surjective by Theorem 4.1. Moreover, if the conjugation by coincides with the identity on a finite-index subgroup , then commutes with the -th power of the image of any Dehn twist, where only depends on the index of in . Then one can argue as in the proof of Lemma 4.8 to get that acts as the identity on , and therefore by either Theorem 2.1 or Theorem 2.8. ∎
References
- [ABD21] Carolyn Abbott, Jason Behrstock, and Matthew Gentry Durham. Largest acylindrical actions and stability in hierarchically hyperbolic groups. Trans. Amer. Math. Soc. Ser. B, 8:66–104, 2021. With an appendix by Daniel Berlyne and Jacob Russell.
- [AL13] Javier Aramayona and Christopher J. Leininger. Finite rigid sets in curve complexes. J. Topol. Anal., 5(2):183–203, 2013.
- [AMS16] Yago Antolín, Ashot Minasyan, and Alessandro Sisto. Commensurating endomorphisms of acylindrically hyperbolic groups and applications. Groups Geom. Dyn., 10(4):1149–1210, 2016.
- [BHMS20] Jason Behrstock, Mark Hagen, Alexandre Martin, and Alessandro Sisto. A combinatorial take on hierarchical hyperbolicity and applications to quotients of mapping class groups, 2020.
- [BHS17a] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Asymptotic dimension and small-cancellation for hierarchically hyperbolic spaces and groups. Proc. Lond. Math. Soc. (3), 114(5):890–926, 2017.
- [BHS17b] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Hierarchically hyperbolic spaces, I: Curve complexes for cubical groups. Geom. Topol., 21(3):1731–1804, 2017.
- [BHS19] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Hierarchically hyperbolic spaces II: Combination theorems and the distance formula. Pacific J. Math., 299(2):257–338, 2019.
- [BHS21] Jason Behrstock, Mark F. Hagen, and Alessandro Sisto. Quasiflats in hierarchically hyperbolic spaces. Duke Math. J., 170(5):909–996, 2021.
- [BKMM12] Jason Behrstock, Bruce Kleiner, Yair Minsky, and Lee Mosher. Geometry and rigidity of mapping class groups. Geom. Topol., 16(2):781–888, 2012.
- [BM06] Jason Behrstock and Dan Margalit. Curve complexes and finite index subgroups of mapping class groups. Geom. Dedicata, 118:71–85, 2006.
- [BM19] Tara E. Brendle and Dan Margalit. Normal subgroups of mapping class groups and the metaconjecture of Ivanov. J. Amer. Math. Soc., 32(4):1009–1070, 2019.
- [CC07] Ruth Charney and John Crisp. Relative hyperbolicity and Artin groups. Geom. Dedicata, 129:1–13, 2007.
- [CM22] Matt Clay and Johanna Mangahas. Hyperbolic quotients of projection complexes. Groups Geom. Dyn., 16(1):225–246, 2022.
- [Dah18] François Dahmani. The normal closure of big Dehn twists and plate spinning with rotating families. Geom. Topol., 22(7):4113–4144, 2018.
- [DDLS21] Spencer Dowdall, Matthew G. Durham, Christopher J. Leininger, and Alessandro Sisto. Extensions of veech groups ii: Hierarchical hyperbolicity and quasi-isometric rigidity, 2021.
- [DGO17] F. Dahmani, V. Guirardel, and D. Osin. Hyperbolically embedded subgroups and rotating families in groups acting on hyperbolic spaces. Mem. Amer. Math. Soc., 245(1156):v+152, 2017.
- [DHS21] François Dahmani, Mark Hagen, and Alessandro Sisto. Dehn filling Dehn twists. Proc. Roy. Soc. Edinburgh Sect. A, 151(1):28–51, 2021.
- [FM12] Benson Farb and Dan Margalit. A primer on mapping class groups, volume 49 of Princeton Mathematical Series. Princeton University Press, Princeton, NJ, 2012.
- [Har86] John L. Harer. The virtual cohomological dimension of the mapping class group of an orientable surface. Invent. Math., 84(1):157–176, 1986.
- [Irm04] Elmas Irmak. Superinjective simplicial maps of complexes of curves and injective homomorphisms of subgroups of mapping class groups. Topology, 43(3):513–541, 2004.
- [Irm06a] Elmas Irmak. Complexes of nonseparating curves and mapping class groups. Michigan Math. J., 54(1):81–110, 2006.
- [Irm06b] Elmas Irmak. Superinjective simplicial maps of complexes of curves and injective homomorphisms of subgroups of mapping class groups. II. Topology Appl., 153(8):1309–1340, 2006.
- [Iva88] N. V. Ivanov. Automorphisms of Teichmüller modular groups. In Topology and geometry—Rohlin Seminar, volume 1346 of Lecture Notes in Math., pages 199–270. Springer, Berlin, 1988.
- [Iva97] Nikolai V. Ivanov. Automorphisms of complexes of curves and of Teichmüller spaces. In Progress in knot theory and related topics, volume 56 of Travaux en Cours, pages 113–120. Hermann, Paris, 1997.
- [Kor99] Mustafa Korkmaz. Automorphisms of complexes of curves on punctured spheres and on punctured tori. Topology Appl., 95(2):85–111, 1999.
- [Luo00] Feng Luo. Automorphisms of the complex of curves. Topology, 39(2):283–298, 2000.
- [McL19] Alan McLeay. Geometric normal subgroups in mapping class groups of punctured surfaces. New York J. Math., 25:839–888, 2019.
- [Min96] Yair N. Minsky. A geometric approach to the complex of curves on a surface. In Topology and Teichmüller spaces (Katinkulta, 1995), pages 149–158. World Sci. Publ., River Edge, NJ, 1996.
- [MS23] Giorgio Mangioni and Alessandro Sisto. Rigidity of mapping class groups mod powers of twists, 2023.
- [PS23] Harry Petyt and Davide Spriano. Unbounded domains in hierarchically hyperbolic groups. Groups Geom. Dyn., 17(2):479–500, 2023.
- [Sch95] Richard Evan Schwartz. The quasi-isometry classification of rank one lattices. Inst. Hautes Études Sci. Publ. Math., 82:133–168 (1996), 1995.
- [Sch20] Saul Schleimer. Notes on the complex of curves, 2020.