Robust Distance-Based Formation Control of Multiple Rigid Bodies with Orientation Alignment
Abstract
This paper addresses the problem of distance- and orientation-based formation control of a class of second-order nonlinear multi-agent systems in D space, under static and undirected communication topologies. More specifically, we design a decentralized model-free control protocol in the sense that each agent uses only local information from its neighbors to calculate its own control signal, without incorporating any knowledge of the model nonlinearities and exogenous disturbances. Moreover, the transient and steady state response is solely determined by certain designer-specified performance functions and is fully decoupled by the agents’ dynamic model, the control gain selection, the underlying graph topology as well as the initial conditions. Additionally, by introducing certain inter-agent distance constraints, we guarantee collision avoidance and connectivity maintenance between neighboring agents. Finally, simulation results verify the performance of the proposed controllers.
keywords:
Multi-agent systems, Cooperative systems, Distributed nonlinear control, Nonlinear cooperative control, Robust control.1 Introduction
During the last decades, decentralized control of networked multi-agent systems has gained a significant amount of attention due to the great variety of its applications, including multi-robot systems, transportation, multi-point surveillance and biological systems. The main focus of multi-agent systems is the design of distributed control protocols in order to achieve global tasks, such as consensus (Ren and Beard, 2005; Olfati-Saber and Murray, 2004; Jadbabaie et al., 2003; Tanner et al., 2007), and at the same time fulfill certain properties, e.g., network connectivity (Egerstedt and Hu, 2001; Zavlanos and Pappas, 2008).
A particular multi-agent problem that has been considered in the literature is the formation control problem, where the agents represent robots that aim to form a prescribed geometrical shape, specified by a certain set of desired relative configurations between the agents. The main categories of formation control that have been studied in the related literature are ((Oh et al., 2015)) position-based control, displacement-based control, distance-based control and orientation-based control. Distance- and orientation-based control constitute the topics in this work.
In distance-based formation control, inter-agent distances are actively controlled to achieve a desired formation, dictated by desired inter-agent distances. Each agent is assumed to be able to sense the relative positions of its neighboring agents, without the need of orientation alignment of the local coordinate systems. When orientation alignment is considered as a control design goal, the problem is known as orientation-based (or bearing-based) formation control. The desired formation is then defined by relative inter-agent orientations. The orientation-based control steers the agents to configurations that achieve desired relative orientation angles. In this work, we aim to design a decentralized control protocol such that both distance- and orientation-based formation is achieved.
The literature in distance-based formation control is rich, and is traditionally categorized in single or double integrator agent dynamics and directed or undirected communication topologies (see e.g. (Olfati-Saber and Murray, 2002; Smith et al., 2006; Hendrickx et al., 2007; Anderson et al., 2007, 2008; Dimarogonas and Johansson, 2008; Cao et al., 2008; Yu et al., 2009; Krick et al., 2009; Dorfler and Francis, 2010; Oh and Ahn, 2011; Cao et al., 2011; Summers et al., 2011; Park et al., 2012; Belabbas et al., 2012; Oh and Ahn, 2014))
Orientation-based formation control has been addressed in (Basiri et al., 2010; Eren, 2012; Trinh et al., 2014; Zhao and Zelazo, 2016), whereas the authors in (Trinh et al., 2014; Bishop et al., 2015; Fathian et al., 2016) have considered the combination of distance- and orientation-based formation.
In most of the aforementioned works in formation control, the two-dimensional case with simple dynamics and point-mass agents has been dominantly considered. In real applications, however, the engineering systems have nonlinear second order dynamics and are usually subject to exogenous disturbances and modeling errors. Another important issue concerns the connectivity maintenance, the collision avoidance between the neighboring agents and the transient and steady state response of the closed loop system, which have not been taken into account in the majority of related woks. Thus, taking all the above into consideration, the design of robust distributed control schemes for the multi-agent formation control problem becomes a challenging task.
Motivated by this, we aim to address here the distance-based formation control problem with orientation alignment for a team of rigid bodies operating in 3D space, with unknown second-order nonlinear dynamics and external disturbances. We propose a purely decentralized control protocol that guarantees distance formation, orientation alignment as well as collision avoidance and connectivity maintenance between neighboring agents and in parallel ensures the satisfaction of prescribed transient and steady state performance. The prescribed performance control framework has been incorporated in multi-agent systems in (Karayiannidis et al., 2012; Bechlioulis and Kyriakopoulos, 2014), where first order dynamics have been considered. Furthermore, the first one only addresses the consensus problem, whereas the latter solves the position based formation control problem, instead of the distance- and orientation-based problem treated here.
The remainder of the paper is structured as follows. In Section 2 notation and preliminary background is given. Section 3 provides the system dynamics and the formal problem statement. Section 4 discusses the technical details of the solution and Section 5 is devoted to a simulation example. Finally, the conclusion and future work directions are discussed in Section 6.
2 Notation and Preliminaries
2.1 Notation
The set of positive integers is denoted as . The real -coordinate space, with , is denoted as ; and are the sets of real -vectors with all elements nonnegative and positive, respectively. Given a set , we denote as its cardinality. The notation is used for the Euclidean norm of a vector . Given a symmetric matrix denotes the minimum eigenvalue of , respectively, where is the set of all the eigenvalues of and is its rank; denotes the Kronecker product of matrices , as was introduced in (Horn and Johnson, 2012). Define by the column vector with all entries , the unit matrix and the matrix with all entries zeros, respectively; is the D sphere of radius and center . The vector connecting the origins of coordinate frames and } expressed in frame coordinates in D space is denoted as . Given , is the skew-symmetric matrix defined according to . We further denote as the Euler angles representing the orientation of frame with respect to frame , where is the D torus. The angular velocity of frame with respect to , expressed in frame coordinates, is denoted as . We also use the notation . For notational brevity, when a coordinate frame corresponds to an inertial frame of reference , we will omit its explicit notation (e.g., etc.). All vector and matrix differentiations are derived with respect to an inertial frame , unless otherwise stated.
2.2 Prescribed Performance Control
Prescribed Performance control, originally proposed in (Bechlioulis and Rovithakis, 2008), describes the behavior where a tracking error evolves strictly within a predefined region that is bounded by certain functions of time, achieving prescribed transient and steady state performance. The mathematical expression of prescribed performance is given by the following inequalities:
where are smooth and bounded decaying functions of time, satisfying and , called performance functions (see Fig. 1). Specifically, for the exponential performance functions , with , appropriately chosen constants, are selected such that and the constants represent the maximum allowable size of the tracking error at steady state, which may be set arbitrarily small to a value reflecting the resolution of the measurement device, thus achieving practical convergence of to zero. Moreover, the decreasing rate of , which is affected by the constants in this case, introduces a lower bound on the required speed of convergence of . Therefore, the appropriate selection of the performance functions imposes performance characteristics on the tracking error .

2.3 Dynamical Systems
Consider the initial value problem:
| (1) |
with , where is a non-empty open set.
Definition 1
Theorem 1
2.4 Graph Theory
An undirected graph is a pair , where is a finite set of nodes, representing a team of agents, and , with , is the set of edges that model the communication capability between neighboring agents. For each agent, its neighbors’ set is defined as , where .
If there is an edge , then are called adjacent. A path of length from vertex to vertex is a sequence of distinct vertices, starting with and ending with , such that consecutive vertices are adjacent. For , the path is called a cycle. If there is a path between any two vertices of the graph , then is called connected. A connected graph is called a tree if it contains no cycles.
The adjacency matrix of graph is defined by , if , and otherwise. The degree of vertex is defined as the number of its neighboring vertices, i.e. . Let also be the degree matrix of the system. Consider an arbitrary orientation of , which assigns to each edge precisely one of the ordered pairs or . When selecting the pair , we say that is the tail and is the head of the edge . By considering a numbering of the graph’s edge set, we define the incidence matrix as it was given in (Mesbahi and Egerstedt, 2010). The Laplacian matrix of the graph is defined as .
Lemma 2.2
(Dimarogonas and Johansson, 2008, Section III) Assume that the graph is a tree. Then, is positive definite.
3 Problem Formulation
3.1 System Model
Consider a set of rigid bodies, with , , operating in a workspace , with coordinate frames , attached to their centers of mass. We consider that each agent occupies a sphere , where is the position of the agent’s center of mass and is the agent’s radius (see Fig. 2). We also denote as , the Euler angles representing the agents’ orientation with respect to an inertial frame , with . By defining with , we model each agent’s motion with the nd order dynamics:
| (2a) | |||
| (2b) | |||
where is a Jacobian matrix that maps the Euler angle rates to , given by
for which we make the following assumption:
Assumption 1
The angle satisfies the inequality .
The aforementioned assumption guarantees that is always well-defined and invertible, since . Furthermore, is the positive definite inertia matrix, is the Coriolis matrix, is the gravity vector, and is a bounded vector representing model uncertainties and external disturbances. We consider that the aforementioned vector fields are unknown and continuous. Finally, is the control input vector representing the D generalized force acting on the agent.
It is also further assumed that each agent can measure its own , and has a limited sensing range of . Therefore, by defining the neighboring set , agent also knows at each time instant all and, since it knows its own , it can compute all .
The topology of the multi-agent network is modeled through the graph , with and . The latter implies that at the graph is undirected, i.e.,
| (4) |
with . We also consider that is static in the sense that no edges are added to the graph. We do not exclude, however, edge removal through connectivity loss between initially neighboring agents, which we guarantee to avoid, as presented in the sequel. It is also assumed that at the neighboring agents are at a collision-free configuration, i.e., , with . Hence, we conclude that
| (5) |
Moreover, given the desired formation constants , for the edge , the formation configuration is called feasible if the set , with , is nonempty.
3.2 Problem Statement
Due to the fact that the agents are not dimensionless and their communication capabilities are limited, the control protocol, except from achieving a desired inter-agent formation, should also guarantee for all that (i) the neighboring agents avoid collision with each other and (iii) all the initial edges are maintained, i.e., connectivity maintenance. Therefore, all pairs of agents that initially form an edge must remain within distance greater than and less than . We also make the following assumptions that are required on the graph topology:
Assumption 2
The communication graph is initially a tree.
Formally, the robust formation control problem under the aforementioned constraints is formulated as follows:
Problem 3.1
Given agents governed by the dynamics (2), under the Assumptions 1-2 and given the desired inter-agent distances and angles , with , , design decentralized control laws such that , the following hold:
-
1.
,
-
2.
,
-
3.
.
4 Problem Solution
4.1 Error Derivation
Let be the stacked vectors of all the agent positions and Euler angles. We denote by the stack column vector of and , respectively, , with the edges ordered as in the case of the incidence matrix . Thus, the following holds:
| (6a) | ||||
| (6b) | ||||
Next, let us introduce the errors :
for all distinct edges , in the numbered order they appear in the edge set .
By taking the time derivative of the aforementioned errors, the following is obtained:
| (7a) | |||
| (7b) | |||
Also, by defining the vectors and employing (6), (7a) and (7b) can be written in vector form as:
| (8a) | ||||
| (8b) | ||||
where , with
By introducing the stack error vector , (8) can be written as:
| (9) |
where
| (10a) | ||||
| (10b) | ||||
Finally, we obtain from (3a):
| (17) | ||||
| (18) |
and thus, (9) can be written as:
| (19) |
4.2 Performance Functions
The concepts and techniques of prescribed performance control (see Section 2.2) are adapted in this work in order to: a) achieve predefined transient and steady state response for the distance and orientation errors as well as ii) avoid the violation of the collision and connectivity constraints between neighboring agents, as presented in Section 3. The mathematical expressions of prescribed performance are given by the inequality objectives:
| (20a) | ||||
| (20b) | ||||
, where
are designer-specified, smooth, bounded, and decreasing functions of time, where , incorporate the desired transient and steady state performance specifications respectively, as presented in Section 2.2, and , , are associated with the collision and connectivity constraints. In particular, we select
| (21a) | ||||
| (21b) | ||||
, which, since the desired formation is compatible with the collision and connectivity constraints (i.e., ), ensures that and consequently, in view of (5), that:
| (22a) | |||
| . Moreover, by choosing | |||
| (22b) | |||
| it is also guaranteed that: | |||
| (22c) | |||
. Hence, if we guarantee prescribed performance via (20), by employing the decreasing property of , we obtain:
and, consequently, owing to (21):
, providing, therefore, a solution to problem 3.1.
In the sequel, we propose a decentralized control protocol that does not incorporate any information on the agents’ dynamic model and guarantees (20) for all .
4.3 Control Design
Given the errors defined in Section 4.1:
Step I-a: Select the corresponding functions and positive parameters , following (20), (22b), and (21), respectively, in order to incorporate the desired transient and steady state performance specifications as well as the collision and connectivity constraints, and define the normalized errors :
| (23a) | |||
| (23b) | |||
, as well as the stack vector forms
| (24) |
where
Step I-b: Define the transformed errors and the signals as
| (25a) | ||||
| (25b) | ||||
and design the decentralized reference velocity vector for each agent as:
| (26) |
where is the edge of agents , i.e., and . The desired velocities (26) can be written in vector form:
| (27) |
where and as they were defined in (10) and (18), respectively. Moreover,
and . It should be noted that is always well-defined due to Assumption 1.
Step II-a: Define the velocity errors , with 111Notice the difference between and ., where , and select the corresponding performance functions , with and . Moreover, define the normalized velocity errors :
with , which is written in vector form as:
| (28) |
with .
Step II-b: Define the transformed velocity errors and the signals as:
| (29a) | |||
| (29b) | |||
and design the decentralized control protocol for each agent as :
| (30) |
with , which can be written in vector form as:
| (31) |
where , and .
Remark 4.1
Note that the selection of according to (21) and of such that along with (5), guarantee that , , , . The prescribed performance control technique enforces these normalized errors and to remain strictly within the sets , and , respectively, , guaranteeing thus a solution to Problem 3.1. It can be verified that this can be achieved by maintaining the boundedness of the modulated errors and .
Remark 4.2
Notice by (26) and (30) that the proposed control protocols are distributed in the sense that each agent uses only local information to calculate its own signal. In that respect, regarding every edge , with , the parameters , as well as the sensing radii , which are needed for the calculation of the performance functions , can be transmitted off-line to each agent . It should also be noted that the proposed control protocol (30) depends exclusively on the velocity of each agent and not on the velocity of its neighbors. Moreover, the proposed control law does not incorporate any prior knowledge of the model nonlinearities/disturbances, enhancing thus its robustness. Furthermore, the proposed methodology results in a low complexity. Notice that no hard calculations (neither analytic nor numerical) are required to output the proposed control signal.
Remark 4.3
Regarding the construction of the performance functions, we stress that the desired performance specifications concerning the transient and steady state response as well as the collision and connectivity constraints are introduced in the proposed control schemes via and , . In addition, the velocity performance functions , impose prescribed performance on the velocity errors , . In this respect, notice that acts as a reference signal for the corresponding velocities , . However, it should be stressed that although such performance specifications are not required (only the neighborhood position and orientation errors need to satisfy predefined transient and steady state performance specifications), their selection affects both the evolution of the errors within the corresponding performance envelopes as well as the control input characteristics (magnitude and rate). Nevertheless, the only hard constraint attached to their definition is related to their initial values. Specifically, , .
4.4 Stability Analysis
The main results of this work are summarized in the following theorem.
Theorem 2
Consider a system of rigid bodies aiming at establishing a formation described by the desired distances and orientation angles , while satisfying the collision and connectivity constraints between neighboring agents, represented by and , respectively, with . Then, under Assumptions 1, 2, the decentralized control protocol (23)-(31) guarantees:
, as well as the boundedness of all closed loop signals.
By differentiating (24) and (28) with respect to time, we obtain:
which, by substituting (19) and (2), becomes:
By employing (27), (31) as well as the fact that from (28), the following is obtained:
| (32a) | |||
| (32b) | |||
where .
By defining , the closed loop system of (32) can be written in compact form as:
| (33) |
Let us also define the open set , with
In what follows, we proceed in two phases. First, the existence of a unique maximal solution of (33) over the set for a time interval is ensured (i.e., ). Then, we prove that the proposed control scheme (27) and (31) guarantees, for all , the boundedness of all closed loop signals, as well as that remains strictly within a compact subset of , which leads by contradiction to .
4.4.1 Phase A:
By selecting the parameters , according to (21), we guarantee that the set is nonempty and open. Moreover, as shown in (22), we guarantee that and . In addition, by selecting , we also guarantee that . Hence, . Furthermore, is continuous on and locally Lipschitz on over the set . Therefore, according to Theorem 1 in Section 2.3, there exists a maximal solution of (33) on the time interval such that .
4.4.2 Phase B:
We have proven in Phase A that and more specifically, that
| (34a) | ||||
| (34b) | ||||
| (34c) | ||||
, from which we conclude that and are bounded by and , respectively, . Furthermore, the error vector , as given in (27), is well defined . Therefore, consider the positive definite and radially unbounded function , with . Time differentiation of yields , which, after substituting (32a), becomes
Note that: 1) are bounded by construction, 2) and are bounded owing to Assumption 1 and (34), respectively, and hence is also bounded due to its continuity. Therefore, by also exploiting the fact that are diagonal, becomes
where is a positive constant, independent of , satisfying
| (35) |
By invoking Lemma A.1 from Appendix A, becomes
with . Therefore, when . By using the definitions of and as well as their positive definiteness , the last inequality can be shown to be equivalent to , where . Therefore, we conclude that
| (36) |
. Furthermore, from (25), by taking the inverse logarithm function, we obtain:
| (37a) | |||
| (37b) | |||
. Thus, the reference velocity vector , as designed in (27), remains bounded . Moreover, since , we also conclude the boundedness of . Finally, differentiating with respect to time, substituting (32a) and using (37), the boundedness of , is deduced as well.
Applying the aforementioned line of proof, we consider the positive definite and radially unbounded function , with , since the error vector is well defined , due to (34c). Time differentiation of yields , which, after substituting (32b), becomes
By exploiting the boundedness of and the positive definiteness and diagonality of due to (34c), the boundedness of , the continuity of and the positive definiteness of , becomes
where and is a positive constant, independent of , that satisfies
Therefore, we conclude that when
which is equivalent to , with . Hence, we conclude that:
. Furthermore, from (29a), we obtain:
| (38) |
, which leads to the boundedness of the decentralized control protocol (31).
Up to this point, what remains to be shown is that can be extended to . In this direction, notice by (37) and (38) that , where:
are nonempty and compact subsets of and , respectively. Hence, assuming that and since , Proposition 2.1 in Section 2.3 dictates the existence of a time instant such that , which is a contradiction. Therefore, . Thus, all closed loop signals remain bounded and moreover . Finally, multiplying (37a) and (37b) by and , respectively, we also conclude:
, which leads to the completion of the proof.
Remark 4.4
Notice that (37) and (38) hold no matter how large the finite bounds , are. Therefore, there is no need to render arbitrarily small by adopting extreme values of the control gains . In the same spirit, large uncertainties involved in the nonlinear model (2) can be compensated, as they affect only the size of through , but leave unaltered the achieved stability properties. Hence, the actual performance of the system becomes isolated against model uncertainties, thus enhancing the robustness of the proposed control schemes.
Remark 4.5
The transient and steady state performance of the closed loop system is explicitly and solely determined by appropriately selecting the parameters , and , , . In that respect, the performance attributes of the proposed control protocols are selected a priori, in accordance to the desired transient and steady state performance specifications. In this way, the selection of the control gains , that has been isolated from the actual control performance, is significantly simplified to adopting those values that lead to reasonable control effort. Nonetheless, it should be noted that their selection affects both the quality of evolution of the errors inside the corresponding performance envelopes as well as the control input characteristics. Hence, fine tuning might be needed in real-time scenarios, to retain the required control input signals within the feasible range that can be implemented by real actuators. Similarly, the control input constraints impose an upper bound on the required speed of convergence of , and , as obtained by the exponentials . Therefore, the selection of the control gains can have positive influence on the overall closed loop system response. More specifically, notice that (35)-(38) provide bounds on and that depend on the constants . Therefore, in the special case that bounds on the model nonlinearities/disturbances are known, we can design the control gains via (30) such that the control signals are retained within certain bounds.
Remark 4.6
Regarding Assumption 1, we stress that, by choosing the initial conditions as well as the desired formation constants close to zero, the condition will not be violated, since the agents will be mostly operating near the point . This is a reasonable assumption for real applications, since the angle represents the pitch angle of agent and is desired to be as close to zero as possible (consider, e.g., aerial vehicles).
Furthermore, notice that the proposed control scheme guarantees collision avoidance only for the initially neighboring agents (at ), since that’s how the edge set is defined. Inter-agent collision avoidance with all possible agent pairs is left as future work by employing time-varying graphs.
5 Simulation Results
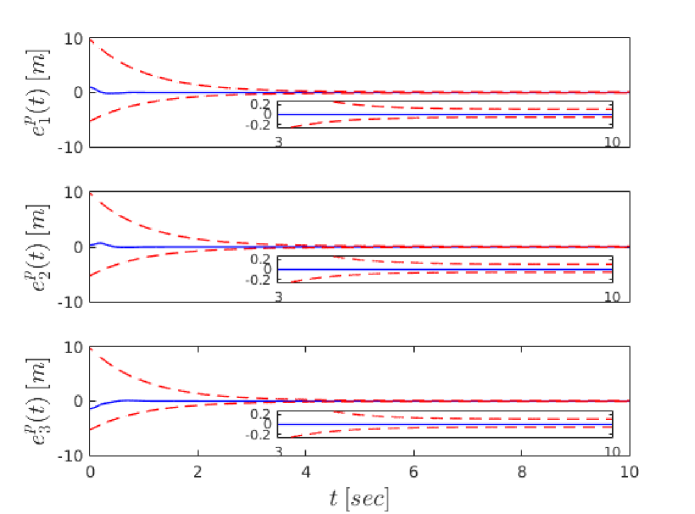
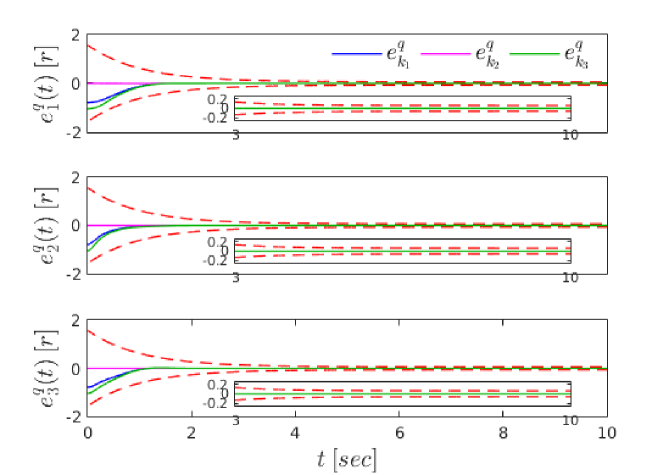
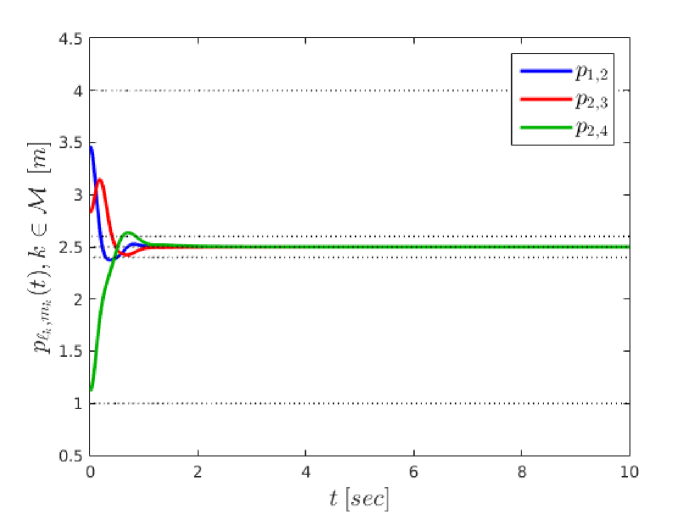
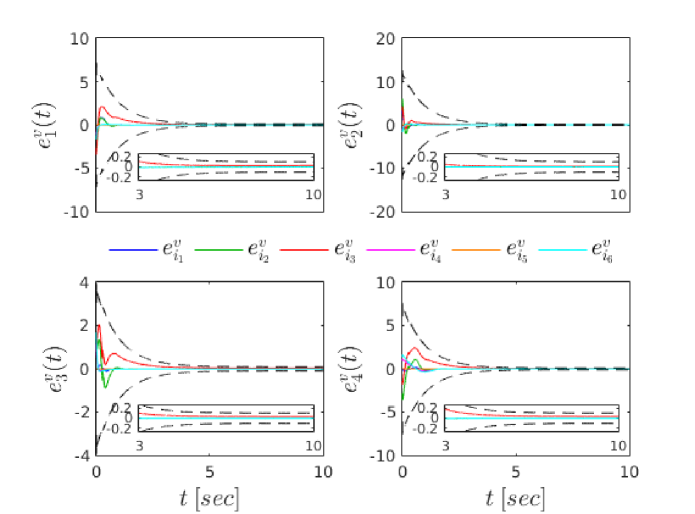
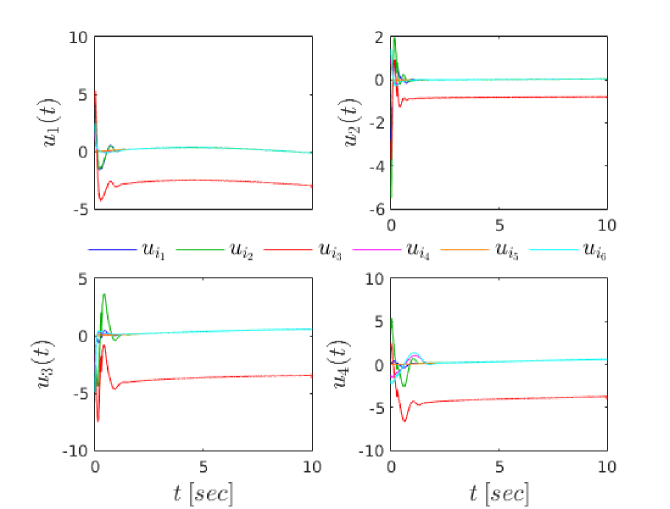
To demonstrate the efficiency of the proposed control protocol, we considered a simulation example with spherical agents of the form (2), with and . We selected the exogenous disturbances as , where the parameters as well as the dynamic parameters of the agents were randomly chosen in . The initial conditions were taken as , which imply the initial edge set . The desired graph formation was defined by the constants . Invoking (21), we also chose and . Moreover, the parameters of the performance functions were chosen as and . In addition, we chose and . Finally, is set to in order to produce reasonable control signals that can be implemented by real actuators. The simulation results are depicted in Fig. 3-7. In particular, Fig. 3 and 4 show the evolution of and along with and , respectively, . Furthermore, the distances along with the collision and connectivity constraints are depicted in Fig. 5. Finally, the velocity errors along and the control signals are illustrated in Figs. 6 and 7, respectively. As it was predicted by the theoretical analysis, the formation control problem with prescribed transient and steady state performance is solved with bounded closed loop signals, despite the unknown agent dynamics and the presence of external disturbances.
6 Conclusions and Future Work
In this work we proposed a robust decentralized control protocol for distance- and orientation-based formation control, collision avoidance and connectivity maintenance of multiple rigid bodies with unknown dynamic models. Simulation examples have verified the efficiency of the proposed approach. Future efforts will be devoted towards extending the current results to directed as well as time-varying communication graph topologies.
References
- Anderson et al. [2007] Anderson, B., Yu, C., Dasgupta, S., and Morse, S. (2007). Control of a Three-Coleader Formation in the Plane. Systems & Control Letters, 56(9), 573–578.
- Anderson et al. [2008] Anderson, B., Yu, C., Fidan, B., and Hendrickx, J. (2008). Rigid Graph Control Architectures for Autonomous Formations. IEEE Control Systems, 28, 48–63.
- Basiri et al. [2010] Basiri, M., Bishop, A., and Jensfelt, P. (2010). Distributed Control of Triangular Formations with Angle-Only Constraints. Systems and Control Letters, 59(2), 147–154.
- Bechlioulis and Kyriakopoulos [2014] Bechlioulis, C. and Kyriakopoulos, K. (2014). Robust Model-Free Formation Control with Prescribed Performance and Connectivity Maintenance for Nonlinear Multi-Agent Systems. 53rd IEEE Conference on Decision and Control, 4509–4514.
- Bechlioulis and Rovithakis [2008] Bechlioulis, C. and Rovithakis, G. (2008). Robust Adaptive Control of Feedback Linearizable MIMO Nonlinear Systems with Prescribed Performance. IEEE Transactions on Automatic Control, 53(9), 2090–2099.
- Belabbas et al. [2012] Belabbas, A., Mou, S., Morse, S., and Anderson, B. (2012). Robustness Issues with Undirected Formations. 51st IEEE Conference on Decision and Control (CDC 2012), 1445–1450.
- Bishop et al. [2015] Bishop, A.N., Deghat, M., Anderson, B., and Hong, Y. (2015). Distributed Formation Control with Relaxed Motion Requirements. International Journal of Robust and Nonlinear Control, 25(17), 3210–3230.
- Cao et al. [2008] Cao, M., Anderson, B., Morse, S., and Yu, C. (2008). Control of Acyclic Formations of Mobile Autonomous Agents. 47th IEEE Conference on Decision and Control, CDC 2008., 1187–1192.
- Cao et al. [2011] Cao, M., Morse, S., Yu, C., Anderson, B., and Dasgupta, S. (2011). Maintaining a Directed, Triangular Formation of Mobile Autonomous Agents. Communications in Information and Systems, 11(1), 1.
- Dimarogonas and Johansson [2008] Dimarogonas, D. and Johansson, K. (2008). On the Stability of Distance-Based Formation Control. 47th IEEE Conference on Decision and Control, CDC 2008, 1200–1205.
- Dorfler and Francis [2010] Dorfler, F. and Francis, B. (2010). Geometric Analysis of the Formation Problem for Autonomous Robots. IEEE Transactions on Automatic Control, 55(10), 2379–2384.
- Egerstedt and Hu [2001] Egerstedt, M. and Hu, X. (2001). Formation Constrained Multi-Agent Control. IEEE Transactions on Robotics and Automation, 17(6), 947–951.
- Eren [2012] Eren, T. (2012). Formation Shape Control Based on Bearing Rigidity. International Journal of Control, 85(9), 1361–1379.
- Fathian et al. [2016] Fathian, K., Rachinskii, D., Spong, M., and Gans, N. (2016). Globally Asymptotically Stable Distributed Control for Distance and Bearing Based Multi-Agent Formations. American Control Conference (ACC), 2016, 4642–4648.
- Hendrickx et al. [2007] Hendrickx, J., Anderson, B., Delvenne, J., and Blondel, V. (2007). Directed Graphs for the Analysis of Rigidity and Persistence in Autonomous Agent Systems. International Journal of Robust and Nonlinear Control, 17(10-11), 960–981.
- Horn and Johnson [2012] Horn, R. and Johnson, C. (2012). Matrix Analysis. Cambridge university press.
- Jadbabaie et al. [2003] Jadbabaie, A., Lin, J., and Morse, S. (2003). Coordination of Groups of Mobile Autonomous Agents Using Nearest Neighbor Rules. IEEE Transactions on Automatic Control, 48(6), 988–1001.
- Karayiannidis et al. [2012] Karayiannidis, Y., Dimarogonas, D., and Kragic, D. (2012). Multi-Agent Average Consensus Control with Prescribed Performance Guarantees. 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), 2219–2225.
- Krick et al. [2009] Krick, L., Broucke, M., and Francis, B. (2009). Stabilisation of Infinitesimally Rigid Formations of Multi-Robot Networks. International Journal of Control, 82(3), 423–439.
- Mesbahi and Egerstedt [2010] Mesbahi, M. and Egerstedt, M. (2010). Graph Theoretic Methods in Multiagent Networks. Princeton University Press.
- Oh and Ahn [2011] Oh, K. and Ahn, H. (2011). Formation Control of Mobile Agents Based on Inter-Agent Distance Dynamics. Automatica, 47(10), 2306–2312.
- Oh and Ahn [2014] Oh, K. and Ahn, H. (2014). Distance-Based Undirected Formations of Single-Integrator and Double-Integrator Modeled Agents in n-Dimensional Space. International Journal of Robust and Nonlinear Control, 24(12), 1809–1820.
- Oh et al. [2015] Oh, K., Park, M., and Ahn, H. (2015). A Survey of Multi-Agent Formation Control. Automatica, 53, 424–440.
- Olfati-Saber and Murray [2002] Olfati-Saber, R. and Murray, R. (2002). Distributed Cooperative Control of Multiple Vehicle Formations using Structural Potential Functions. IFAC World Congress, 15(1), 242–248.
- Olfati-Saber and Murray [2004] Olfati-Saber, R. and Murray, R. (2004). Consensus Problems in Networks of Agents with Switching Topology and Time-Delays. IEEE Transactions on Automatic Control, 49(9), 1520–1533.
- Park et al. [2012] Park, M., Oh, K., and Ahn, H. (2012). Modified Gradient Control for Acyclic Minimally Persistent Formations to Escape from Collinear Position. 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), 1423–1427.
- Ren and Beard [2005] Ren, W. and Beard, R. (2005). Consensus Seeking in Multi-Agent Systems Under Dynamically Changing Interaction Topologies. IEEE Transactions on Automatic Control, 50(5), 655–661.
- Smith et al. [2006] Smith, S., Broucke, M.E., and Francis, B.A. (2006). Stabilizing a Multi-Agent System to an Equilateral Polygon Formation. 17th International Symposium on Mathematical Theory of Networks and Systems, 2415–2424.
- Sontag [2013] Sontag, E. (2013). Mathematical Control Theory: Deterministic Finite Dimensional Systems, volume 6. Springer Science & Business Media.
- Summers et al. [2011] Summers, T., C. Yu, C., Dasgupta, S., and Anderson, B. (2011). Control of Minimally Persistent Leader-Remote-Follower and Coleader Formations in the Plane. IEEE Transactions on Automatic Control, 56(12), 2778–2792.
- Tanner et al. [2007] Tanner, H., Jadbabaie, A., and Pappas, G. (2007). Flocking in Fixed and Switching Networks. IEEE Transactions on Automatic Control, 52(5), 863–868.
- Trinh et al. [2014] Trinh, M., Oh, K., and Ahn, H. (2014). Angle-Based Control of Directed Acyclic Formations with Three-Leaders. Proceedings of the 2014 International Conference on Mechatronics and Control, ICMC, 2268–2271.
- Yu et al. [2009] Yu, C., Anderson, B., Dasgupta, S., and Fidan, B. (2009). Control of Minimally Persistent Formations in the Plane. SIAM Journal on Control and Optimization, 48(1), 206–233.
- Zavlanos and Pappas [2008] Zavlanos, M. and Pappas, G. (2008). Distributed Connectivity Control of Mobile Networks. IEEE Transactions on Robotics, 24(6), 1416–1428.
- Zhao and Zelazo [2016] Zhao, S. and Zelazo, D. (2016). Bearing Rigidity and Almost Global Bearing-Only Formation Stabilization. IEEE Transactions on Automatic Control, 61(5), 1255–1268.
Appendix A
Lemma A.1
The matrix is positive definite .
Firstly, note that Assumption 2 implies that is connected at . Hence, in view of (34a), will stay connected for all . Moreover, since we do not consider adding edges to the graph, will also be a tree for all , and thus, the matrix is positive definite for all , according to Lemma 2.2. Therefore, the matrix
is also positive definite. Moreover, (34a) implies that . Hence, there exists at least one such that , where . Therefore, and , which implies the positive definiteness of (see Observation 7.1.8, pp. 431 in [Horn and Johnson, 2012]).