SafeLight: A Reinforcement Learning Method toward Collision-free Traffic Signal Control
Abstract
Traffic signal control is safety-critical for our daily life. Roughly one-quarter of road accidents in the U.S. happen at intersections due to problematic signal timing, urging the development of safety-oriented intersection control. However, existing studies on adaptive traffic signal control using reinforcement learning technologies have focused mainly on minimizing traffic delay but neglecting the potential exposure to unsafe conditions. We, for the first time, incorporate road safety standards as enforcement to ensure the safety of existing reinforcement learning methods, aiming toward operating intersections with zero collisions. We have proposed a safety-enhanced residual reinforcement learning method (SafeLight) and employed multiple optimization techniques, such as multi-objective loss function and reward shaping for better knowledge integration. Extensive experiments are conducted using both synthetic and real-world benchmark datasets. Results show that our method can significantly reduce collisions while increasing traffic mobility.
Introduction
Traffic congestion has become increasingly costly. For example, on average, American drivers lost 26 hours in traffic jams even in 2020 under the pandemic situation, which already includes a drop from 73 hours in 2019 (INTRIX 2021). The American Transportation Research Institute estimates that congestion costs the U.S. freight sector $74.1 billion annually, of which $66.1 billion is from urban areas (Glover 2020). Intersections, especially in the urban area, are where the aforementioned congestion problems happen every single day. Signalized intersections are one of the most common bottleneck road types in urban environments. Thus, Traffic Signal Control (TSC) plays a vital role in urban traffic management (McElroy and Taylor 2007).
To improve the mobility of vehicles in a city, Reinforcement Learning (RL), a widely adopted method for control problems, has been applied to TSC research and has proven to be effective (Genders and Razavi 2016; Zheng et al. 2019; Chen et al. 2020; Wei et al. 2021). The biggest advantage of RL is that it directly learns how to take the next action by observing the feedback (rewards) from the environment after previous actions and continuously explores the possible cases. By setting mobility-related rewards like vehicle delay, RL-based TSC methods can learn to adjust the traffic signals to accommodate the real traffic demand and hence achieve better than human performance to make traffic move faster.
However, TSC must consider both traffic mobility and traffic safety. A small mistake in traffic signals can cause significant loss of life and property. According to the Federal Highway Administration, more than 50 percent of the combined fatal and injury crashes occur at or near intersections (Coben 2006). Moreover, crashes at signalized intersections occupy about one–third of all intersection fatalities, including a large proportion that involves red-light running (Himes et al. 2017) and improper left turns (Le et al. 2018), which could be reduced through well-designed signal timing plans. This motivates the study of safety rules in the traditional transportation field.
Conventional transportation research has extensively studied the safety effects associated to signal timing. In particular, previous works (Anjana and Anjaneyulu 2015; Wong, Sze, and Li 2007) analyzed the contributory factors for traffic crashes and found red-light violations, yellow-light time changes, and left-turn phases are critical for traffic safety. Other works (Essa and Sayed 2019; Persaud, Lord, and Palmisano 2002) predicted the safety risk through regression models and Bayesian methods and provided authoritative equations and rules (Urbanik et al. 2015) as domain knowledge to help traffic engineers determine the signal timing in practice.
Some RL-based TSC methods attempted to address the safety concerns. They usually incorporate safety into the reward and combine it with mobility-related rewards (Khamis and Gomaa 2014; Gong et al. 2020; Wei et al. 2018). Unfortunately, this often results in highly sensitive performance w.r.t. the setting and inevitably leads to a long learning process. In other words, finding the appropriate rewards of traffic mobility and safety for RL models requires not only the ad-hoc tuning of various reward factors but also a long time of exploration to learn the safe actions. The tuning process can be avoided by Inverse Reinforcement Learning (Ng, Russell et al. 2000) where the reward signal is learned by the RL agent, but still it would require a large volume of data to learn the reward for safety, large enough to cover various unsafe cases which are difficult to obtain. The long training time is painful especially since accidents caused by actions of traffic signals are rare during training, RL methods have to explore a large number of cases to learn the safety rules. Moreover, even the well-learned model might not obey the safety rules in practice.
Therefore, can we better incorporate safety rules and improve RL to address both traffic safety and mobility requirements? Such a safety-enhanced RL model is a critical step closer to the real-world deployment of RL-based TSC methods. In this work, we step toward this goal and show that frequent traffic crashes can be avoided through carefully designed RL-based TSC methods. By investigating the available domain safety rules, we formulate a safety model accordingly to decide if a TSC action is unsafe. Next, we incorporate the safety model as add-on safety modules into the RL model with systematic analysis. More precisely, we integrate it into the different parts of the RL design, including the state, action, reward and loss function. A safety-enhanced RL approach, SafeLight, which utilizes residual learning (Johannink et al. 2019), is then proposed. We analyze the pros and cons of each design choice for the safety modules and conduct experiments on both synthetic and real-world datasets from existing benchmarks. Results show that our methods can be easily integrated into existing works and achieve superior performance under both safety and mobility measures.
In summary, the contributions of this work are as follows:
We reveal that current RL-based methods can impose safety concerns. Compared with conventional non-RL methods, the occurrences of collisions are higher in both synthetic and real-world benchmark datasets.
We provide a systematic analysis of possible integration of domain safety rules and propose SafeLight. Through testing on two RL models with different designs, we verify that our residual-based method can be incorporated into existing RL models, or most RL methods in general, to enhance their safety to near zero-collision level.
We evaluate our proposed methods on multiple datasets. Results show that SafeLight achieves over 99 percent reduction in collisions than the backbone RL model and about 30 percent lower average waiting time than the Fixed-time control. The excellent performance of our proposed method holds under different environment settings.
Related Works
RL-based TSC Methods
There have been many research works concentrated on improving traffic mobility using RL algorithms. This is largely because they can adapt to real-time traffic, which directly evolves in complex and unpredictable circumstances, such as real geometric road conditions and unexpected accidents and congestion (Khattak 1991) (Wang, Djahel, and McManis 2014). Those that claim the state-of-the-art performance in TSC can be roughly categorized into two groups: 1) Deep Q-Network (DQN) based RL algorithms (Mnih et al. 2015) where the neural network is used to decide the action taken by an RL agent, and 2) Actor-Critic Network based RL algorithms (Mnih et al. 2016) where an extra neural network is used to estimate the state advantages. Among the first group, a Double DQN (DDQN) with a dual-agent algorithm (Van Hasselt, Guez, and Silver 2016) is proposed to obtain a stable traffic signal control policy. The work of (Zhang et al. 2021) extends the DDQN algorithm using the forgetful experience mechanism and the lenient weight training mechanism to speed up training. A Dueling DDQN (3DQN) model (Liang et al. 2019) is proposed with prioritized experience replay to further improve the sampling efficiency. In the second group, Proximal Policy Optimization (PPO) (Schulman et al. 2017), which follows the advantage actor-critic paradigm, is employed in the work of (Ault, Hanna, and Sharon 2019) to achieve a smooth and monotonic learning curve. However, these RL methods only improve mobility without considering safety concerns.
There are a few RL-based works that consider multiple objectives, including safety. To be deployed in the real world, traffic signals must provide both mobility and safety (Koonce and Rodegerdts 2008). In (Khamis and Gomaa 2014), a multi-agent RL method with a synthetic reward is proposed to optimize multiple objectives, i.e., reducing trip waiting time, total trip time, junction waiting time and collision risks. The main issues of this method are: (1) the weights of the rewards for different objectives need to be determined by domain experts; and (2) the convergence may not be guaranteed. Instead of using synthetic rewards, some works (Jin and Ma 2015; Gong et al. 2020) consider modeling the synthetic value function or synthetic Q-values (i.e., the synthetic expected long-term reward) for improving both mobility and safety. This method is also known as multi-objective RL (MORL), which learns different value functions independently and then makes the decision based on the synthetic Q-values. Compared to synthetic reward-based models, MORL methods guarantee to converge. The main concern is that the traffic safety risk estimation in their framework requires detailed labeled traffic crash data in the study area, which is usually not available for most roads.
Safe Reinforcement Learning
In high-stakes domains like transportation, safety is particularly important, thus researchers are paying attention to both long-term reward and safety violation avoidance. Based on the survey paper (Garcıa and Fernández 2015), two main strategies for Safe Reinforcement Learning are considered: one is the modification of the optimality criterion and the other is the modification of the exploration process to avoid unsafe situations. The former, for example in the work (Di Castro, Tamar, and Mannor 2012), uses constrained criterion to maximize the return while keeping other expected measures within some certain bounds; while the latter takes advantage of external knowledge, such as teacher advice (Geramifard 2012). Others (Thomas, Luo, and Ma 2021) (Alshiekh et al. 2018) propose Safe Reinforcement Learning by planning ahead a short time into the future to anticipate safety violations before they occur. Safe RL is a promising path toward applying RL to safety-critical problems yet has not been applied to TSC.
Background
This section will describe preliminary knowledge about reinforcement learning (RL). Moreover, background knowledge about current safety rules and standards in the transportation field will be introduced.
Reinforcement Learning
An RL agent learns decisions through interactions with the environment that is modeled as a Markov Decision Process (MDP), defined as a tuple , where denotes a state space, denotes an action space, denotes transition probabilities between states, denotes a reward function, and is a discount factor. Specifically, at each time period , the agent observes a state and takes an action , which is determined by the policy . Then, the next state is reached with a transition probability , and the agent receives a reward . The action-value function is defined to evaluate how good it is for an agent to pick the action based on policy in state . It is expressed as the expected cumulative reward: . The objective of an RL agent is to learn the optimal policy for maximizing .
TSC as an MDP
When RL is applied in TSC, the signalized intersection environment is commonly modeled as the following MDP.
State Space
The controller receives a representation of the current intersection state. In literature, different factors are considered in the state space definition, e.g., the number of stopped vehicles, the number of approaching vehicles (i.e., queue length), the average speed of approaching vehicles, and the maximum of the vehicle waiting time. Some papers also use the vehicle positions with the help of advanced sensing capabilities. The state space can be any subset of the above sensing data, among which queue length is the one commonly used in most existing works.
Action Space
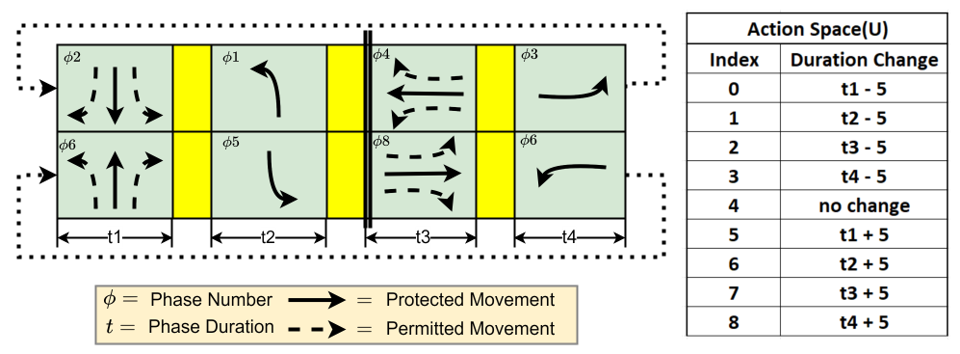
Based on the state, the controller chooses an action (i.e., signaling decision) to take. There are two major types of action space in TSC: cyclic and acyclic action spaces. In the cyclic setting, the control action is defined as a cycle — a complete sequence of signal phases with computed duration. As shown in Figure 1, the cycle has four phases in the order of . The RL agent interacts with the environment cycle by cycle, adaptively adjusting a phase duration in the cycle by either increasing or decreasing its current duration. In the acyclic setting, the control action is defined as a phase . Each time the agent chooses a phase from all possible phases as its action to take at the current state. In this setting, the execution time of each action, , is fixed.
Reward Function
After taking an action, the traffic controller receives a reward to indicate how good the signaling decision was. The reward function is one important signal to guide the RL agent toward the well-defined objective, e.g., improving mobility. Vehicle delay, waiting time, intersection throughput, and queue length can also be used in the reward function.
Domain Strategy on Safety
Safety strategies from the transportation domain are in the form of logical rules and traffic guidelines from authorities. Safety around an intersection is affected by many factors, including signal control, intersection geometry, traffic demand/volume, driving behavior, etc. Among all factors, signal control is the crucial one that traffic engineers take charge of. Transportation authorities like the Institute of Transportation Engineers (ITE) offer authoritative domain equations for calculating signal timing parameters with safety aspects in consideration. In addition, the Department of Transportation also provides safety-conscious design standards (Traffic 2009; Wolshon, Pande et al. 2016; Lockwood 1997; Koonce and Rodegerdts 2008). In this subsection, we use the left-turn phasing in the domain design standards as an example to illustrate the potential safety concerns. For other standards like yellow change and red clearance interval, we refer to (Urbanik et al. 2015).
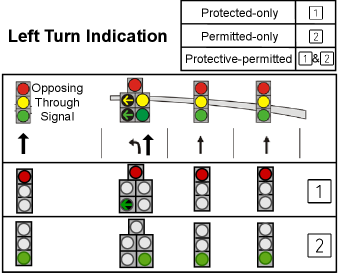
Logical Rules for Left-turn Phasing
As is shown in Figure 2, left-turn phasing in practice often operates in the following modes: protected-only, where left-turn drivers have the exclusive right of the way, permitted-only, where left-turn drivers may yield to the opposing vehicles, and protective-permitted which is the combination of the aforementioned two. Many studies have shown that permitted-only and protective-permitted operations can reduce delay while having a negative impact on safety. To ensure safety, it is possible to adjust the left-turn phasing mode by integrating domain rules or guidelines. Several left-turn phasing guidelines in the Federal Signal Timing Manual (Koonce and Rodegerdts 2008) could be used to build our safety model, which determines if a left-turn phasing mode is unsafe under certain conditions. For example, based on the guidelines, if the percentile speed (Koonce and Rodegerdts 2008) of opposing traffic is greater than mph, then the permitted left-turn phasing mode is unsafe. More details of the logical rules used in our design can be found in the Appendix.
Note that there are different safety rules or guidelines on left-turn phasing. In this paper, we refer to the guidelines suggested by the Federal Signal Timing Manual (Koonce and Rodegerdts 2008), and other guidelines could also be similarly integrated into our proposed framework.
Proposed Approach
This section introduces the RL model and the proposed safety-module integration framework SafeLight with a comprehensive discussion of the pro and cons of its variations.
RL Model
We implement our proposed safety-module integration approach based on an existing RL model (Liang et al. 2019) that has the state-of-the-art performance. In this model, sensing devices, such as vehicle-tracking cameras, are assumed to track the position and speed of vehicles within a certain sensing radius. The raw traffic data is pre-processed to image-alike matrices by segmenting the intersection into same-size square-shape cells with a two-value vector of the vehicles if any. To showcase that SafeLight is independent of RL design settings, both cyclic actions from (Liang et al. 2019) and acyclic actions from another benchmark RL model (Ault, Hanna, and Sharon 2019) are tested in our experiments. The reward function is the cumulative vehicle waiting time between the actions measured from the point of time when the vehicles have entered the intersection until the start of the green light. 3DQN is chosen as the RL algorithm.
Safety Module Integration: SafeLight
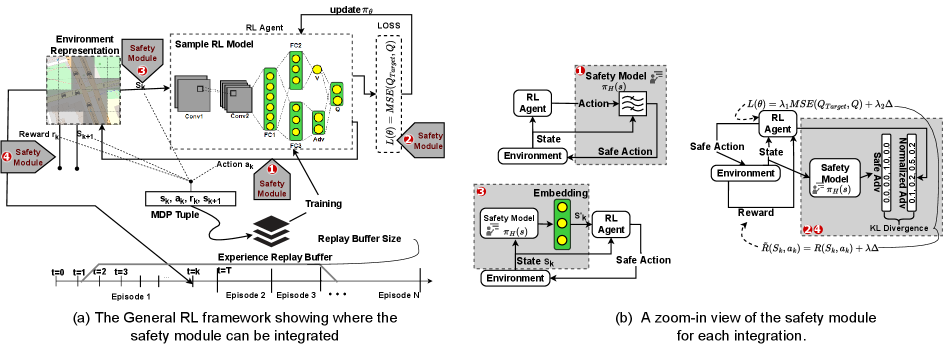
The proposed SafeLight for integration, see Figure 3, is described here. The safety modules include a safety model, , which takes the current traffic condition as input and verifies whether an action is unsafe. To avoid the turn crash in our example case, the safety model consists of the logical rules abstracted from the left-turn phasing guidelines. For instance, if a left turn is permitted but not protected and the foe vehicles are approaching the junctions at a faster speed, then the left turn should be switched to protected mode. More details can be seen in the Appendix.
We describe below how the safety modules can be integrated into different parts of a general RL framework.
SafeLight-Act
A safety module can be integrated into RL by directly influencing the actions. Inspired by the residual RL method (Johannink et al. 2019), where the final action comes from the action learned from an RL agent and the action from a human-designed controller, in our setting, the action from the RL agent is filtered by the safety model as shown in Figure 3(b) with a mark of . Instead of directly learning a safe action, the learned action is corrected whenever a potential safety issue is detected by the safety guidelines. Such supervision is partial (a minimum interference only if the action is unsafe). For example, when the action given by RL includes a permitted left turn and it is determined unsafe, the permitted left turn signal will turn red, prohibiting all left-turn movements.
Analysis Pros: First, it decouples the goal of improving mobility and safety. The RL model is only for improving mobility, while the safety module is only used as a proactive measure for any safety concern and corrects the RL agent only if necessary. This is especially effective when there are only a few conflicting movements, e.g., nighttime. Moreover, the safety module can be easily built upon the RL model with minimal modifications to the RL model. Last, the final executed action filtered by the safety module can guarantee safety since the safe action is not learned by the RL agent. Cons: It highly depends on the current volume of conflicting vehicles. If the RL agent is corrected by the safety module frequently, the training process will fluctuate immensely and be hard to converge.
SafeLight-Loss
The safety module can also be integrated into the loss function, which becomes multi-task learning. In multi-task learning, where the performance relies on multiple optimization objectives, the standard approach is to train a model that can minimize a loss function including multiple terms parameterized by a vector , corresponding to different optimizing tasks (Kokkinos 2017; Zamir et al. 2018). Simple average or weighted sum are two common methods to balance different terms: . We leverage such knowledge to build upon the existing RL model layering up one more optimizing task, i.e., minimizing collisions, into the loss function as shown in the equation below.
where is generated by double Q-learning algorithm and is the advantage function. The first term of the loss function is from the backbone RL algorithm (3DQN), by which the parameters can be updated by the Mean Square Error (MSE) of the target network and online network. denotes the second term as illustrated in Figure 3(b) with a mark of , advocating safer actions through minimizing the gap between the actual action and the related safe action. Specifically, the Kullback-Leibler (KL) divergence (Hershey and Olsen 2007) of the normalized advantages over the action space and the desired safe advantage distribution inferred by the safety model is measured. The normalized advantages reflect the agent’s current preference over the actions and can be used as a measure of how far it is to the desired safe action. Note that when the action from the RL agent is safe (i.e., no collisions occur), the value of the second term in the loss function will be zero.
Analysis Pros: The merit comes from the idea of multi-task learning, with one model optimized towards two objectives. Cons: Such integration needs to fine-tune the coefficient factor of the two optimization objectives in the loss function for each intersection-specific scenario. Domain scientists in the transportation field still have to develop an understanding of the backbone RL algorithm before being able to set the coefficients reasonably.
SafeLight-R
A safety module can be integrated into the reward function. Similar to the idea of reward shaping (Ng, Harada, and Russell 1999), the domain knowledge is transformed as additional rewards to guide the RL agent to incorporate human expertise. We consider a general form of reward shaping, i.e., the additive form formally defined as , by adding a safety-related numeric reward value. In our approach, we take the same strategy as how we integrate it into the loss function, shown in Figure 3(b) with a mark of . Once an unsafe action is confirmed by the safety model, a desired safe advantage distribution is formulated. Then the difference between the true advantage distribution over the action space and the desired safe advantage distribution can be measured using the KL divergence and used as an extra numeric reward value denoting the penalty for deviating from desired safe standard, i.e.,
Analysis. Pros: Owning to the reward-driven property of RL, modifying the reward is an effective and straightforward way to help the RL agent find an optimal solution considering both objectives. Cons: It may suffer from reward shaping, where the performance highly relies on the design of the reward function. Since the estimated policy from DNN does not have a one-to-one mapping to the multiobjective reward, there is no theoretical proof for convergence.
SafeLight-S&R and SafeLight-S&Loss
A safety module can be integrated into the state. The safety model can be embedded into an m-dimensional latent space via a layer of Multi-Layer Perceptron, as shown in the middle of Figure 3(b) with a mark of . We define it as where and are weight matrix and bias vector to learn, and is ReLU function. This embedding is then incorporated into the Q network via concatenation to serve as an additional feature. Such feature-rich input can be combined with SafeLight-Loss or SafeLight-R to further boost the performance.
Analysis. Pros: It is a feature-rich method. The safety model is processed to a feature and encoded into the state representation. If used properly, we may obtain a performance gain since all DNN methods require a well-developed input representation. Cons: It must be combined with SafeLight-Loss or SafeLight-R methods. Otherwise, without a safety-aware performance measure during training, the RL model cannot learn from this safety embedding.
Experiments
In this section, we conduct experiments to answer the following research questions222The source codes are publicly available from https://gitlab.com/wenlu057/traffic-safety.git.:
RQ1: Compared with state-of-the-arts, would the SafeLight outperform under both mobility and safety measures (i.e., reducing collisions without noticeably compromising mobility)?
RQ2: Can SafeLight maintain the same level of performance under different RL designs (i.e., cyclic and acyclic actions)?
RQ3: Is SafeLight flexible to be integrated into different backbone RL models (i.e., 3DQN and IPPO)?
Evaluation Environment
The experiments are conducted in the microscopic traffic simulator, SUMO, under time-variant traffic flow.
Intersection Modeling
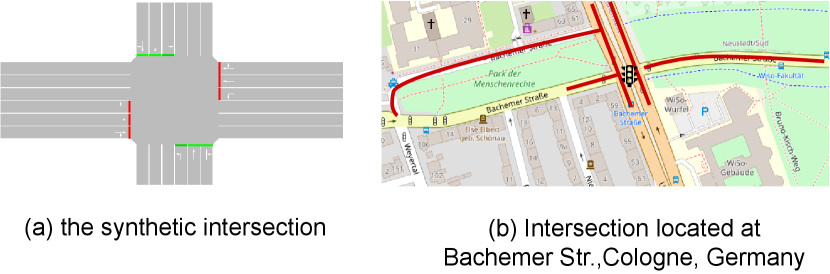
We perform experiments on a synthetic intersection (Liang et al. 2019) and a real-world intersection (Mei et al. 2022; Ault and Sharon 2021) with various settings. The synthetic intersection in Figure 4(a) has four approaches and twelve one-way vehicular movements. The real-world dataset is built based on the intersection at Cologne, Germany, as shown in Figure 4(b). Real traffic flow is adopted into the simulated environment. The intersection has 8 approaching lanes. In both intersections, the permitted left turn and U-turn are allowed. The setup of SUMO simulation environment assumes: (1) accurate vehicle detection, which is often available in practice via cameras or other sensors; (2) same deceleration rate, which can be modified based on needs and (3) permitted left turn in the timing plan.
Collision Data
The collisions are generated by deliberately tuning up the probability that causes vehicles to ignore conflicting vehicles already in the intersection to mimic the aggressive driving behaviors, which are the root cause of any collisions (Hamdar, Mahmassani, and Chen 2008). Using the generated collision data instead of the real-world collision data is more beneficial since (1) we can obtain a much larger collision dataset so that the sample is not biased; (2) unlike uncomfortable braking and predicted safety risk score, the number of collisions under this stress testing is the most straightforward indicator of safety hazards.
Comparison Methods
We compare the performance of our approach with two RL methods that address safety under the same evaluation metrics to verify the effectiveness of our algorithm. Additionally, we compare against two baseline methods: the backbone RL model and the Fixed-time controller.
Fixed-time (Koonce and Rodegerdts 2008): The lights are controlled solely on preset timings.
Backbone RL(3DQN) (Liang et al. 2019): The backbone RL model minimizes delay without considering safety.
Synthetic Reward (Syn-R) (Khamis and Gomaa 2014): This method uses a synthetic reward defined as . It includes two terms, each associated with an objective.
Synthetic Value (Syn-Q) (Gong et al. 2020): The linearly weighted sum of Q-values for the two objectives is used to obtain a synthetic Q function.
Experiment Result
Here, we present the experimental results on two benchmark datasets (synthetic and real-world), two RL designs (cyclic and acyclic action spaces), and two backbone RL models (3DQN and PPO) to verify the effectiveness and generalizability of our proposed SafeLight. Both evaluation and training results are shown.
Evaluation Metric
We evaluate the performance on both mobility and safety and answer the above research questions. The average waiting time, throughput, and the number of stop vehicles are chosen as the performance measure for mobility. The number of collisions that happened within one simulation time frame is selected as the safety measure.
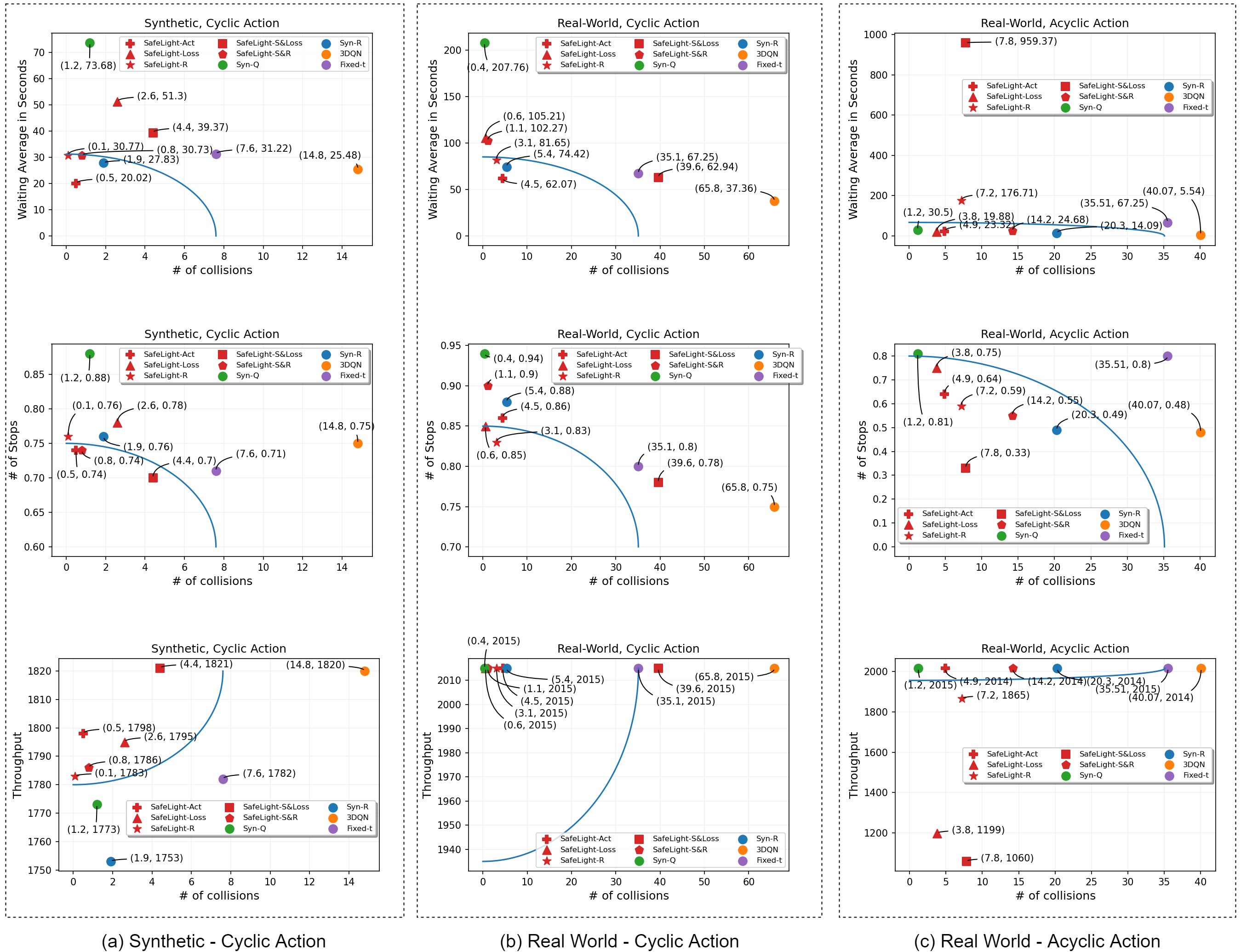
Results of Evaluation Performance (RQ1)
Figure 5 summarizes the key performance under three different settings (synthetic dataset and cyclic action space, real-world dataset and cyclic action space, real-world dataset and acyclic action space). We have the following observations:
Though maintaining relatively better mobility, Backbone RL(3DQN) has the highest rate of collisions, even worse than the Fixed-time control method in all settings, which verifies our viewpoint that existing RL-based work imposes safety issues and thus needs safety design. Syn-Q is better at reducing collisions but increases the average waiting time compared with Backbone RL(3DQN).
All the SafeLight methods consistently outperform Backbone RL(3DQN) in reducing collisions, while showing different performances in reducing the waiting time. SafeLight-Act achieves 93.94% and 86% fewer collisions on synthetic and real-world datasets, respectively. SafeLight-R outperforms others on the synthetic setting in terms of the collision rates, with a 99.32% improvement in safety.
We also noticed that embedding the safety model into the state does not seem to bring a boost in performance. This is similar to supervised learning, in which adding an additional feature without adding any labeling information will not guide the model learning.
We especially paid attention to whether a safe action now may lead to future unsafe action in SafeLight-Act, since intervention is made when the action of RL agent is determined as unsafe. Through prudent analysis, we found there are two cases in the consecutive states after the intervention: no opposing through movement vehicles or endless ones. In the former case, left-turn drivers will grant the right of the way. In the latter case, left turns are always prohibited, and left-turn drivers will have the green in the subsequent protected left-turn phase. Neither of them will result in an unsafe state.
We observed the cases where SafeLight-R avoided collisions while SafeLight-Act caused collisions. Although by construction, SafeLight-Act should be able to prevent all the collisions, through collision visualization, we found collisions occurred in one case where the left-turn vehicle was entering the intersection during the green light and the opposing through vehicle was also driving in during the yellow light. In another case, a vehicle entered the intersection during the yellow light and was still in it when the yellow was switched to red; thus, the opposing vehicle conflicted with that vehicle. The SafeLight-Act cannot eliminate the above two cases (i.e., a collision involving a yellow phase).
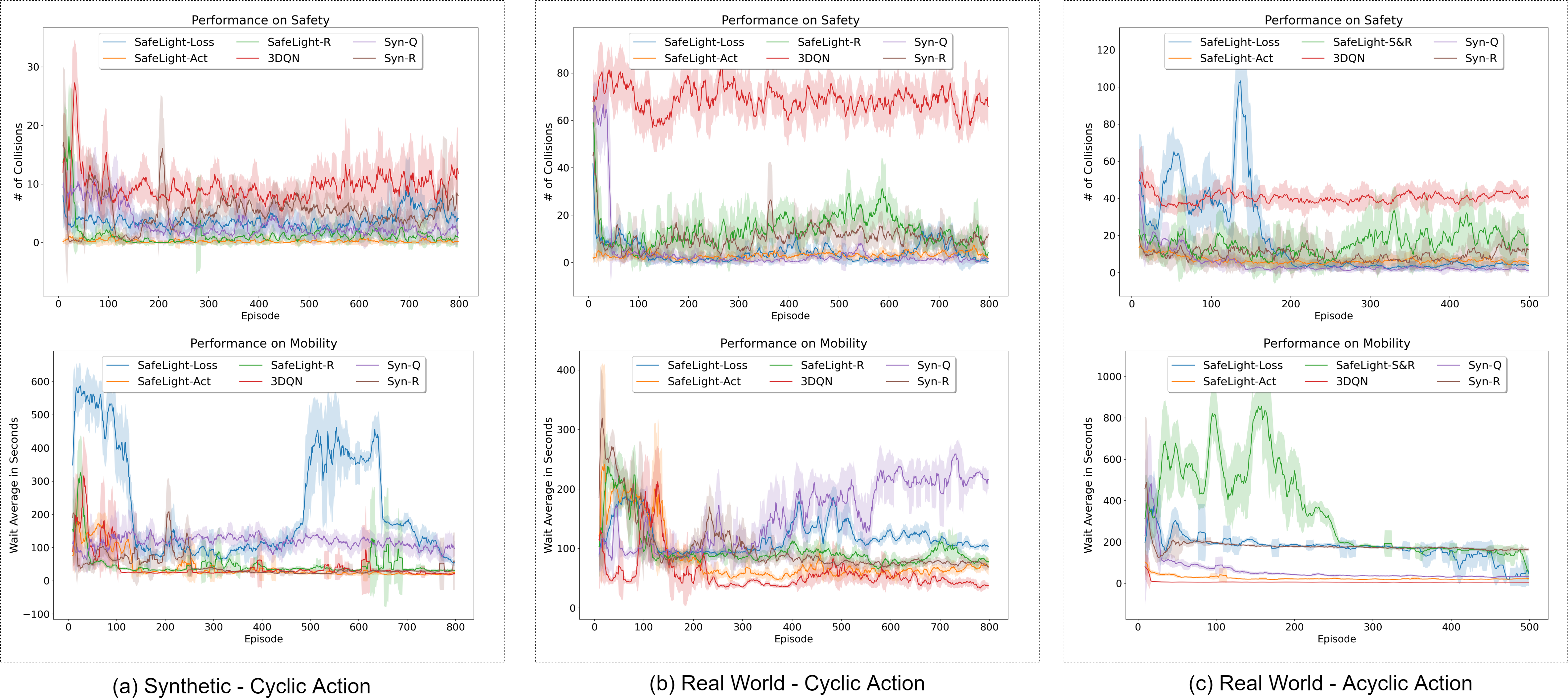
Convergence during Training
The convergence curves of RL methods are shown in Figure 6. Compared with Backbone RL(3DQN), SafeLight-Act can quickly converge to lower average waiting times and maintain strong safety performance throughout the training. This is reasonable since this method directly corrects the unsafe learned action. Although the reward is delayed under SafeLight-Act, from the results we can still observe that occasional intervention does not hurt the learning much.
| Mobility | Safety | ||
| Backbone RL | Methods | Average Delay | collisions |
| SafeLight-Act | 16.57 | 0.2 | |
| SafeLight-Loss | 13.07 | 3.8 | |
| SafeLight-R | 16.60 | 0.0 | |
| IPPO | Syn-R | 20.02 | 0.8 |
| Syn-Q | 25.47 | 7.3 | |
| 3DQN | 10.66 | 24.5 | |
| Fixed-time | 27.38 | 7.0 |
Study of Action Generalizability (RQ2)
As discussed in earlier sections, there are two types of action spaces in TSC, i.e., cyclic and acyclic actions. Here, we investigate whether our design could generalize to different action settings.
In general, the acyclic action space increases collisions, which is one of the reasons why most existing real-world traffic signals operate in a cyclic manner. Among all the methods, SafeLight-Loss and SafeLight-Act perform relatively well under both the cyclic and acyclic action settings. In comparison, the Syn-R can perform well in the cyclic setting but fail to minimize collisions in the acyclic setting. The performance gap in different settings attributes to the ad-hoc tuning of two reward factors, which verifies that the performance is sensitive to individual settings.
Study of Model Generalizability (RQ3)
To verify that the proposed SafeLight can maintain superior performance under different backbone RL models. We adopt another RL model, IPPO, from the benchmark (Ault and Sharon 2021) to evaluate the performance in the same synthetic environment as the previous experiment. The state space is defined as the queue length plus the max waiting time per lane. The action is defined as acyclic. The reward function is defined as the same as the state space. Table 1 shows the evaluation results. We can see that SafeLight can still outperform other baseline methods in terms of minimizing collisions.
Conclusion
In this work, we address the safety concern of current RL methods. By exploiting domain knowledge on safety, we propose a safety-enhanced reinforcement learning method that integrates a safety module into the underlying RL model. Our proposed method is compared with other baseline models under various benchmark datasets to show its effectiveness. We demonstrate that our model also has good generalizability under different settings, which is critical for real-world deployment with constantly changing traffic demands. We share our pathway for finding a way to enforce safety which can be a guideline for future study.
Our proposed model could be utilized for more specific domain safety rules, including yellow and red timing. In the future, we will extend our method to more transportation rules toward a safer RL-based TSC method.
Acknowledgments
This research was supported, in part, by Federal Highway Administration’s Exploratory Advanced Research (EAR) Program under Grant Number 693JJ320C000021, and by National Science Foundation (USA) under Grant Numbers CNS–1948457 and IIS-2153311. The views and conclusions contained in this paper are those of the authors and should not be interpreted as representing any funding agencies.
References
- Alshiekh et al. (2018) Alshiekh, M.; Bloem, R.; Ehlers, R.; Könighofer, B.; Niekum, S.; and Topcu, U. 2018. Safe reinforcement learning via shielding. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 32.
- Anjana and Anjaneyulu (2015) Anjana, S.; and Anjaneyulu, M. 2015. Safety analysis of urban signalized intersections under mixed traffic. Journal of safety research, 52: 9–14.
- Ault, Hanna, and Sharon (2019) Ault, J.; Hanna, J. P.; and Sharon, G. 2019. Learning an interpretable traffic signal control policy. arXiv preprint arXiv:1912.11023.
- Ault and Sharon (2021) Ault, J.; and Sharon, G. 2021. Reinforcement Learning Benchmarks for Traffic Signal Control. In Thirty-fifth Conference on Neural Information Processing Systems Datasets and Benchmarks Track (Round 1).
- Chen et al. (2020) Chen, C.; Wei, H.; Xu, N.; Zheng, G.; Yang, M.; Xiong, Y.; Xu, K.; and Li, Z. 2020. Toward a thousand lights: Decentralized deep reinforcement learning for large-scale traffic signal control. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 34, 3414–3421.
- Coben (2006) Coben, J. H. 2006. National Highway Traffic Safety Administration (NHTSA) notes. Contrasting rural and urban fatal crashes 1994-2003. Annals of emergency medicine, 47(6): 574–5.
- Di Castro, Tamar, and Mannor (2012) Di Castro, D.; Tamar, A.; and Mannor, S. 2012. Policy gradients with variance related risk criteria. arXiv preprint arXiv:1206.6404.
- Essa and Sayed (2019) Essa, M.; and Sayed, T. 2019. Full Bayesian conflict-based models for real time safety evaluation of signalized intersections. Accident Analysis & Prevention, 129: 367–381.
- Garcıa and Fernández (2015) Garcıa, J.; and Fernández, F. 2015. A comprehensive survey on safe reinforcement learning. Journal of Machine Learning Research, 16(1): 1437–1480.
- Genders and Razavi (2016) Genders, W.; and Razavi, S. 2016. Using a deep reinforcement learning agent for traffic signal control. arXiv preprint arXiv:1611.01142.
- Geramifard (2012) Geramifard, A. 2012. Practical reinforcement learning using representation learning and safe exploration for large scale markov decision processes. Ph.D. thesis, Massachusetts Institute of Technology.
- Glover (2020) Glover, B. 2020. 2020 urban mobility report. Texas Transportation Institute. [Online; accessed 5-September-2021].
- Gong et al. (2020) Gong, Y.; Abdel-Aty, M.; Yuan, J.; and Cai, Q. 2020. Multi-Objective reinforcement learning approach for improving safety at intersections with adaptive traffic signal control. Accident Analysis and Prevention, 144.
- Hamdar, Mahmassani, and Chen (2008) Hamdar, S. H.; Mahmassani, H. S.; and Chen, R. B. 2008. Aggressiveness propensity index for driving behavior at signalized intersections. Accident Analysis & Prevention, 40(1): 315–326.
- Hershey and Olsen (2007) Hershey, J. R.; and Olsen, P. A. 2007. Approximating the Kullback Leibler divergence between Gaussian mixture models. In 2007 IEEE International Conference on Acoustics, Speech and Signal Processing-ICASSP’07, volume 4, IV–317. IEEE.
- Himes et al. (2017) Himes, S.; Gross, F. B.; Persaud, B.; Eccles, K. A.; et al. 2017. Safety Evaluation of Red-Light Indicator Lights (RLILs) At Intersections. Technical report, United States. Federal Highway Administration.
- INTRIX (2021) INTRIX. 2021. Downtown Travel Plummets 44% in 2020 amid COVID-19 Pandemic. https://inrix.com/press-releases/2020-traffic-scorecard-us/. [Online; accessed 5-December-2021].
- Jin and Ma (2015) Jin, J.; and Ma, X. 2015. Adaptive group-based signal control by reinforcement learning. Transportation Research Procedia, 10: 207–216.
- Johannink et al. (2019) Johannink, T.; Bahl, S.; Nair, A.; Luo, J.; Kumar, A.; Loskyll, M.; Ojea, J. A.; Solowjow, E.; and Levine, S. 2019. Residual reinforcement learning for robot control. In International Conference on Robotics and Automation (ICRA), 6023–6029. IEEE.
- Khamis and Gomaa (2014) Khamis, M. A.; and Gomaa, W. 2014. Adaptive multi-objective reinforcement learning with hybrid exploration for traffic signal control based on cooperative multi-agent framework. Engineering Applications of Artificial Intelligence, 29: 134–151.
- Khattak (1991) Khattak, A. J. 1991. Driver response to unexpected travel conditions: effect of traffic information and other factors. Ph.D. thesis, Northwestern University.
- Kokkinos (2017) Kokkinos, I. 2017. Ubernet: Training a universal convolutional neural network for low-, mid-, and high-level vision using diverse datasets and limited memory. In Proceedings of the IEEE conference on computer vision and pattern recognition, 6129–6138.
- Koonce and Rodegerdts (2008) Koonce, P.; and Rodegerdts, L. 2008. Traffic signal timing manual. Technical report, United States. Federal Highway Administration.
- Le et al. (2018) Le, T.; Gross, F.; Harmon, T.; Eccles, K.; et al. 2018. Safety Evaluation of Corner Clearance at Signalized Intersections. Technical report, United States. Federal Highway Administration.
- Liang et al. (2019) Liang, X.; Du, X.; Wang, G.; and Han, Z. 2019. A Deep Reinforcement Learning Network for Traffic Light Cycle Control. IEEE Transactions on Vehicular Technology, 68: 1243–1253.
- Lockwood (1997) Lockwood, I. M. 1997. ITE traffic calming definition. Institute of Transportation Engineers. ITE Journal, 67(7): 22.
- McElroy and Taylor (2007) McElroy, R.; and Taylor, R. 2007. The Congestion Problem. Public roads, 71(1).
- Mei et al. (2022) Mei, H.; Lei, X.; Da, L.; Shi, B.; and Wei, H. 2022. LibSignal: An Open Library for Traffic Signal Control. arXiv preprint arXiv:2211.10649.
- Mnih et al. (2016) Mnih, V.; Badia, A. P.; Mirza, M.; Graves, A.; Lillicrap, T.; Harley, T.; Silver, D.; and Kavukcuoglu, K. 2016. Asynchronous methods for deep reinforcement learning. In International conference on machine learning, 1928–1937. PMLR.
- Mnih et al. (2015) Mnih, V.; Kavukcuoglu, K.; Silver, D.; Rusu, A. A.; Veness, J.; Bellemare, M. G.; Graves, A.; Riedmiller, M.; Fidjeland, A. K.; Ostrovski, G.; et al. 2015. Human-level control through deep reinforcement learning. nature, 518(7540): 529–533.
- Ng, Harada, and Russell (1999) Ng, A. Y.; Harada, D.; and Russell, S. 1999. Policy invariance under reward transformations: Theory and application to reward shaping. In Icml, volume 99, 278–287.
- Ng, Russell et al. (2000) Ng, A. Y.; Russell, S.; et al. 2000. Algorithms for inverse reinforcement learning. In Icml, volume 1, 2.
- Persaud, Lord, and Palmisano (2002) Persaud, B.; Lord, D.; and Palmisano, J. 2002. Calibration and transferability of accident prediction models for urban intersections. Transportation Research Record, 57–64.
- Schulman et al. (2017) Schulman, J.; Wolski, F.; Dhariwal, P.; Radford, A.; and Klimov, O. 2017. Proximal policy optimization algorithms. arXiv preprint arXiv:1707.06347.
- Thomas, Luo, and Ma (2021) Thomas, G.; Luo, Y.; and Ma, T. 2021. Safe reinforcement learning by imagining the near future. Advances in Neural Information Processing Systems, 34: 13859–13869.
- Traffic (2009) Traffic, C. 2009. Manual on uniform traffic control devices.
- Urbanik et al. (2015) Urbanik, T.; Tanaka, A.; Lozner, B.; Lindstrom, E.; Lee, K.; Quayle, S.; Beaird, S.; Tsoi, S.; Ryus, P.; Gettman, D.; et al. 2015. Signal timing manual, volume 1. Transportation Research Board Washington, DC.
- Van Hasselt, Guez, and Silver (2016) Van Hasselt, H.; Guez, A.; and Silver, D. 2016. Deep reinforcement learning with double q-learning. In Proceedings of the AAAI conference on artificial intelligence, volume 30.
- Wang, Djahel, and McManis (2014) Wang, S.; Djahel, S.; and McManis, J. 2014. A multi-agent based vehicles re-routing system for unexpected traffic congestion avoidance. In 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), 2541–2548. IEEE.
- Wei et al. (2021) Wei, H.; Zheng, G.; Gayah, V.; and Li, Z. 2021. Recent advances in reinforcement learning for traffic signal control: A survey of models and evaluation. ACM SIGKDD Explorations Newsletter, 22(2): 12–18.
- Wei et al. (2018) Wei, H.; Zheng, G.; Yao, H.; and Li, Z. 2018. Intellilight: A reinforcement learning approach for intelligent traffic light control. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, 2496–2505.
- Wolshon, Pande et al. (2016) Wolshon, B.; Pande, A.; et al. 2016. Traffic engineering handbook. John Wiley & Sons.
- Wong, Sze, and Li (2007) Wong, S.; Sze, N.-N.; and Li, Y.-C. 2007. Contributory factors to traffic crashes at signalized intersections in Hong Kong. Accident Analysis & Prevention, 39(6): 1107–1113.
- Zamir et al. (2018) Zamir, A. R.; Sax, A.; Shen, W.; Guibas, L. J.; Malik, J.; and Savarese, S. 2018. Taskonomy: Disentangling task transfer learning. In Proceedings of the IEEE conference on computer vision and pattern recognition, 3712–3722.
- Zhang et al. (2021) Zhang, C.; Jin, S.; Xue, W.; Xie, X.; Chen, S.; and Chen, R. 2021. Independent reinforcement learning for weakly cooperative multiagent traffic control problem. IEEE Transactions on Vehicular Technology, 70(8): 7426–7436.
- Zheng et al. (2019) Zheng, G.; Xiong, Y.; Zang, X.; Feng, J.; Wei, H.; Zhang, H.; Li, Y.; Xu, K.; and Li, Z. 2019. Learning phase competition for traffic signal control. In Proceedings of the 28th ACM international conference on information and knowledge management, 1963–1972.