Self-triggered Consensus of Multi-agent Systems with Quantized Relative State Measurements
Abstract.
This paper addresses the consensus problem of first-order continuous-time multi-agent systems over undirected graphs. Each agent samples relative state measurements in a self-triggered fashion and transmits the sum of the measurements to its neighbors. Moreover, we use finite-level dynamic quantizers and apply the zooming-in technique. The proposed joint design method for quantization and self-triggered sampling achieves asymptotic consensus, and inter-event times are strictly positive. Sampling times are determined explicitly with iterative procedures including the computation of the Lambert -function. A simulation example is provided to illustrate the effectiveness of the proposed method.
1. Introduction
With the recent development of information and communication technologies, multi-agent systems have received considerable attention. Cooperative control of multi-agent systems can be applied to various areas such as multi-vehicle formulation [1] and distributed sensor networks [2]. A basic coordination problem of multi-agent systems is consensus, whose aim is to reach an agreement on the states of all agents. A theoretical framework for consensus problems has been introduced in the seminal work [3], and substantial progress has been made since then; see the survey papers [4, 5] and the references therein.
In practice, digital devices are used in multi-agent systems. Conventional approaches to implementing digital platforms involve periodic sampling. However, periodic sampling can lead to unnecessary control updates and state measurements, which are undesirable for resource-constrained multi-agent systems. Event-triggered control [6, 7, 8] and self-triggered control [9, 10, 11] are promising alternatives to traditional periodic control. In both event-triggered and self-triggered control systems, data transmissions and control updates occur only when needed. Event-triggering mechanisms use current measurements and check triggering conditions continuously or periodically. On the other hand, self-triggering mechanisms avoid such frequent monitoring by calculating the next sampling time when data are obtained. Various methods have been developed for event-triggered consensus and self-triggered consensus; see, e.g., [12, 13, 14, 15, 16]. Comprehensive surveys on this topic are available in [17, 18]. Some specifically relevant studies are cited below.
The bandwidth of communication channels and the accuracy of sensors may be limited in multi-agent systems. In such situations, only imperfect information is available to the agents. We also face the theoretical question of how much accuracy in information is necessary for consensus. From both practical and theoretical point of view, quantized consensus has been studied extensively. For continuous-time multi-agent systems, infinite-level static quantization is often considered under the situation where quantized measurements are obtained continuously; see, e.g., [19, 20, 21, 22, 23, 24, 25]. Event-triggering mechanisms and self-triggering mechanisms have been proposed for continuous-time multi-agent systems with infinite-level static quantizers in [26, 27, 28, 29, 30, 31, 32, 33, 34, 35]. Self-triggered consensus with ternary controllers has been also studied in [36, 37]. For event-triggered consensus under unknown input delays, finite-level dynamic quantizers have been developed in [38], where the quantization error goes to zero as the agent state converges to the origin.
For discrete-time multi-agent systems, finite-level dynamic quantizers to achieve asymptotic consensus have been designed in [39, 40, 41, 42, 43]. This type of dynamic quantization has been also used for periodic sampled-data consensus [44], event-triggered consensus [45, 46, 47, 48, 49], and consensus under denial-of-service attacks [50]. Moreover, an event-triggered average consensus protocol has been proposed for discrete-time multi-agent systems with integer-valued states in [51], and it has been extended to the privacy-preserving case in [52].
In this paper, we consider first-order continuous-time multi-agent systems over undirected graphs. Our goal is to jointly design a finite-level dynamic quantizer and a self-triggering mechanism for asymptotic consensus. We focus on the situation where relative states, not absolute states, are sampled as, e.g., in [16, 19, 22, 30, 29, 24, 31, 32, 34]. We assume that each agent’s sensor has a scaling parameter to adjust the maximum measurement range and the accuracy. For example, if indirect time-of-flight sensors [53] are installed in agents, then the modulation frequency of light signals determines the maximum range and the accuracy. In the case of cameras, they can be changed by adjusting the focal length; see Section 11.2 of [54] for a mathematical model of cameras.
In the proposed self-triggered framework, the agents send the sum of the relative state measurements to all their neighbors as in the self-triggered consensus algorithm presented in [14]. In other words, each agent communicates with its neighbors only at the sampling times of itself and its neighbors. The sum is transmitted so that the neighbors compute the next sampling times, not the inputs. After receiving it, the neighbors update the next sampling times. Since the measurements are already quantized when they are sampled, the sum can be transmitted without error, even over channels with finite capacity.
The main contributions of this paper are summarized as follows:
1. We propose a joint algorithm for finite-level dynamic quantization and self-triggered sampling of the relative states. We also provide a sufficient condition for the consensus of the quantized self-triggered multi-agent system. This sufficient condition represents a quantitative trade-off between data accuracy and sampling frequency. Such a trade-off can be a useful guideline for sensing performance, power consumption, and channel capacity.
2. In the proposed method, the inter-event times, i.e., the sampling intervals of each agent, are strictly positive, and hence Zeno behavior does not occur. In addition, the agents can compute sampling times using an explicit formula with the Lambert -function (see, e.g., [55] for the Lambert -function). Consequently, the proposed self-triggering mechanism is simple and efficient in computation.
We now compare our results with previous studies. The finite-level dynamic quantizers developed in [39, 40, 41, 42, 43] and their aforementioned extensions require the absolute states. More specifically, they quantize the error between the absolute state and its estimate for communication over finite-capacity channels. In this framework, the agents have to estimate the states of all their neighbors for decoding. In contrast, we develop finite-level dynamic quantizers for relative state measurements. As in the existing studies above, we also employ the zooming-in technique introduced for single-loop systems in [56, 57]. However, due to the above-mentioned difference in what is quantized, the quantizer we study has several notable features. For example, the proposed algorithm can be applied to GPS-denied environments. Moreover, the estimation of neighbor states is not needed, which reduces the computational burden on the agents.
A finite-level quantizer may be saturated, i.e., it does not guarantee the accuracy of quantized data in general if the original data is outside of the quantization region. To achieve asymptotic consensus, we need to update the scaling parameter of the quantizer so that the relative state measurement is within the quantization region and the quantization error goes to zero asymptotically. In [29, 32, 34], infinite-level static quantizers have been used for quantized self-triggered consensus of first-order multi-agent systems. Hence the issue of quantizer saturation has not been addressed there. In [29], infinite-level uniform quantization has been considered, and consequently only consensus to a bounded region around the average of the agent states has been achieved. The quantized self-triggered control algorithm proposed in [32, 34] achieves asymptotic consensus with the help of infinite-level logarithmic quantizers, but sampling times have to belong to the set with some , which makes it easy to exclude Zeno behavior. Table 1 summarizes the comparison between this study and several relevant studies.
The difficulty of this study is that the following three conditions must be satisfied:
-
•
avoiding quantizer saturation;
-
•
decreasing the quantization error asymptotically; and
-
•
guaranteeing that the inter-event times are strictly positive.
To address this difficulty, we introduce a new semi-norm for the analysis of multi-agent systems. The semi-norm is constructed from the maximum norm and is suitable for handling errors of individual agents due to quantization and self-triggered sampling. Moreover, the Laplacian matrix of the multi-agent system has the following semi-contractivity property: There exists a constant such that
for all and ; see [58, 59] for the semi-contraction theory. The semi-contractivity property facilitates the analysis of state trajectories under self-triggered sampling and consequently leads to a simple design of the scaling parameter for finite-level dynamic quantization.
| Triggering mechanism | Measurement | Quantization | Agent dynamics | |
|---|---|---|---|---|
| This study | Self-trigger | Relative state | Finite-level & dynamic | First-order |
| [38, 46, 47, 48, 49] | Event-trigger | Absolute state | Finite-level & dynamic | High-order |
| [29, 32, 34] | Self-trigger | Relative state | Infinite-level & static | First-order |
The rest of this paper is organized as follows. In Section 2, we introduce the system model. In Section 3, we provide some preliminaries on the semi-norm and sampling times. Section 4 contains the main result, which gives a sufficient condition for consensus. In Section 5, we explain how the agents compute sampling times in a self-triggered fashion. A simulation example is given in Section 6, and Section 7 concludes this paper.
Notation: We denote the set of nonnegative integers by . We define . Let . We denote the transpose of by . For a vector with the -th element , its maximum norm is
and the corresponding induced norm of with the -th element is given by
When the eigenvalues of a symmetric matrix with satisfy , we write . We define
and write for . The graph Laplacian of an undirected graph is denoted by . We denote the Lambert -function by for . In other words, is the solution of the transcendental equation . Throughout this paper, we shall use the following fact frequently without comment: For and , the solution of the transcendental equation can be written as
2. System Model
2.1. Multi-agent system
Let be , and consider a multi-agent system with agents. Each agent has a label . For every , the dynamics of agent is given by
| (1) |
where and are the state and the control input of agent , respectively. The network topology of the multi-agent system is given by a fixed undirected graph with vertex set and edge set
If , then agent is called a neighbor of agent , and these two agents can measure the relative states and communicate with each other. For , we denote by the set of all neighbors of agent and by the degree of the node , that is, the cardinality of the set .
Consider the ideal case without quantization or self-triggered sampling, and set
| (2) |
for and . It is well known that the multi-agent system to which the control input (2) is applied achieves average consensus under the following assumption.
Assumption 2.1.
The undirected graph is connected.
In this paper, we place Assumption 2.1. Moreover, we make two assumptions, which are used to avoid the saturation of quantization schemes. These assumptions are relative-state analogues of the assumptions in the previous studies on quantized consensus based on absolute state measurements (see, e.g., Assumptions 3 and 4 of [44]).
Assumption 2.2.
A bound satisfying
is known by all agents.
Assumption 2.3.
A bound satisfying
is known by all agents.
We make an assumption on the number of quantization levels.
Assumption 2.4.
The number of quantization levels is an odd number, i.e., for some .
In this paper, we study the following notion of consensus of multi-agent systems under Assumption 2.2.
Definition 2.5.
The multi-agent system achieves consensus exponentially with decay rate under Assumption 2.2 if there exists a constant , independent of , such that
| (3) |
for all and .
2.2. Quantization scheme
Let be a quantization range and let be the number of quantization levels satisfying Assumption 2.4. We assume that and are shared among all agents. We apply uniform quantization to the interval . Namely, a quantization function is defined by
for , where and . By construction,
for all . The agents use a fixed but change in order to achieve consensus asymptotically. In other words, is the scaling parameter of the quantization scheme.
Let be a strictly increasing sequence with , and is the -th sampling time of agent . To describe the quantized data used at time for , we assume for the moment that a certain function satisfies the unsaturation condition
| (4) |
Agent measures the relative state for each neighbor and obtains its quantized value
Then agent sends to each neighbor the sum
The neighbors use the sum to calculate the next sampling time, not the input. This data transmission implies that the agents use information not only about direct neighbors but also about two-hop neighbors as in the self-triggering mechanism developed in [14].
The sum consists of the quantized values, and therefore agent can transmit without errors even through finite-capacity channels. In fact, since is an odd number under Assumption 2.4, the sum belongs to the finite set
where is as in Assumption 2.3. The encoder of agent assigns an index to each value and transmits the index corresponding to the sum to the decoder of each neighbor . Since the agents share , , and , the decoder can generate the sum from the received index.
2.3. Triggering mechanism
Let a strictly increasing sequence with be the sampling times of agent as in Section 2.2, and let . As in the ideal case (2), the control input of agent is given by the sum of the quantized relative state,
| (5) |
for when the unsaturation condition (4) is satisfied. Then the dynamics of agent can be written as
| (6) |
where and are, respectively, the errors due to sampling and quantization defined by
| (7) | ||||
| (8) |
for .
We make a triggering condition on the error due to sampling. From the dynamics (1) and the input (5) of each agent, we have that for all ,
| (9) | ||||
| (10) |
Substituting (9) and (10) into (7) motivates us to consider the following function obtained only from the inputs:
| (11) |
for . Notice that
for all . Using the quantization range , we define the -th sampling time of agent by
| (12) |
where is a threshold and are upper and lower bounds of inter-event times, respectively, i.e., .
The behaviors of the errors and can be roughly described as follows. Under the triggering mechanism (12), the error due to sampling is upper-bounded by . The error due to quantization is also bounded from above by a constant multiple of for when the quantizer is not saturated. Hence, if decreases to zero as , then both errors and also go to zero.
After some preliminaries in Section 3, Section 4 is devoted to finding a quantization range , a threshold , and upper and lower bounds of inter-event times such that consensus (3) as well as the unsaturation condition (4) are satisfied. In Section 5, we present a method for agent to compute the sampling times in a self-triggered fashion.
We conclude this section by making two remarks on the triggering mechanism (12). First, the constraint is made solely to simplify the consensus analysis, and agent can compute the sampling times without using the lower bound . Second, continuous communication with the neighbors is not required to compute the sampling times, although the inputs of the neighbors are used in the triggering mechanism (12). It is enough for agent to communicate with the neighbor at their sampling times and . In fact, the inputs are piecewise-constant functions, and agent can know the input of the neighbor from the received data . Based on the updated information on , agent recalculates the next sampling time. We will discuss these issues in detail in Section 5.
3. Preliminaries
In this section, we introduce a semi-norm on and basic properties of sampling times. The reader eager to pursue the consensus analysis of multi-agent systems might skip detailed proofs in this section and return to them when needed.
3.1. Semi-norm for consensus analysis
Inspired by the norm used in the theory of operator semigroups (see, e.g., the proof of Theorem 5.2 in Chapter 1 of [60]), we introduce a new semi-norm on , which will lead to the semi-contractivity property [58, 59] of the matrix exponential of the negative Laplacian matrix.
Lemma 3.1.
Let be an arbitrary norm on , and let . Assume that and satisfy
| (13) |
for all and . Then the function defined by
satisfies the following properties:
-
a)
For all ,
-
b)
For all , if and only if .
-
c)
is a semi-norm on , i.e., for all and ,
-
d)
If satisfies and , then
for all and .
Proof.
Let and be given.
b) This follows immediately from the definition of .
c) We obtain
Since it follows from the triangle inequality for the norm that
d) By assumption,
This yields
for all . ∎
Remark 3.2.
If the inequality in Lemma 3.1.d) is satisfied for some , then is a semi-contraction with respect to the semi-norm for all . In Lemma 9 of [58], a more general method is presented for constructing such semi-norms. The tuning parameter of this method is a matrix whose kernel coincides with the span . Since the constants and in (13) are easier to tune for the joint design of a quantizer and a self-triggering mechanism, we will use Lemma 3.1 in the consensus analysis.
3.2. Basic properties of sampling times
Let be a strictly increasing sequence of real numbers with for . Set and for . Define
for and . Roughly speaking, in the context of the multi-agent system, are all sampling times of the agents without duplication, and is the number of times agent has measured the relative states on the interval . Hence is the latest sampling time of agent at time . Define and
for . In our multi-agent setting, represents the set of agents measuring the relative states at .
Proposition 3.3.
Let be a strictly increasing sequence of real numbers with for . The sequences and defined as above have the following properties for all and :
-
a)
.
-
b)
if and only if . In this case,
-
c)
.
-
d)
If for some , then there exists with such that .
-
e)
If for all , then
-
f)
If for all , there exists such that
then as .
Proof.
a) The inequality
follows immediately from the definition of . Since , the inequality
| (14) |
holds for . Suppose that the inequality (14) holds for some . Then
which yields . Therefore, the inequality (14) holds for all by induction.
b) Assume that . By the definition of , we obtain . On the other hand, by the definition of . Since is a nondecreasing sequence by a), it follows that
Hence
Conversely, assume that . Then
By the definition of , we obtain .
c) The definition of directly yields
It remains to show that
By construction, holds for all . First, we consider the case
Since by definition, we obtain . Let . Then . On the other hand, and hence
Since by a) and b), we obtain
Next, assume that
Let
Then from . If , then
If , then we have from and b) that
Since , it follows that .
d) We have from c) that
This and the assumption yield , and therefore . Let
If , then we obtain
Assume that . Then and
This and b) yield
e) Since by the definition of , it follows that
f) For all , there exists such that . We have from c) that . Since is a set with finite elements, there exist and a subsequence of such that
for all . For each , let satisfy
Assume, to get a contradiction, that . Take
There exists such that
for all .
4. Consensus Analysis
In this section, first we define a semi-norm based on the maximum norm. Next, we obtain a bound of the state with respect to the semi-norm for the design of the quantization range. After these preparations, we give a sufficient condition for consensus in the main theorem. Finally, we find bounds of the constant in (13) corresponding to our multi-agent setting.
Throughout this and the next sections, we consider the quantized self-triggered multi-agent system presented in Section 2. Let with be the sampling times of agent , which are given in (12). Define and as in Section 3.2. We let , where is the undirected graph of the multi-agent system.
4.1. Semi-norm based on the maximum norm
We start by showing the following simple result.
Lemma 4.1.
Let satisfy and let be the Laplacian matrix of a connected undirected graph with vertices. Let be an arbitrary norm on and the corresponding induced norm on . Fix , and define
Then and the inequalities
| (16) | ||||
| (17) |
hold for all and .
Proof.
Let be the eigenvalues of . Since the undirected graph corresponding to is connected, we have that is an eigenvalue of with algebraic multiplicity . Let and define
There exists an orthogonal matrix such that
Since is the eigenvector corresponding to the eigenvalue , one can decompose into
for some .
Let and . Noting that
we obtain
| (18) |
Since
it follows that
| (19) |
| (20) |
On the other hand, using , we obtain
| (21) |
| (22) |
Fix a constant . Here we apply Lemmas 3.1 and 4.1 in the case . By Lemma 4.1,
| (25) |
It is immediate that
| (26) |
for all . We also have
where from (16) and from (17). Define
| (27) |
Then is a semi-norm on and satisfies the properties in Lemma 3.1. The next lemma motivates us to investigate the semi-norm of the state of .
Lemma 4.2.
4.2. Design of quantization ranges
For a given , the quantization range is defined by
| (29) |
We also set
and
| (30) | ||||
| (31) |
The following lemma shows that is bounded by for a suitable decay parameter .
Lemma 4.3.
Proof.
Since as by Proposition 3.3.f), it suffices to prove that
| (33) |
for all . Lemma 3.1.a) with gives
By Assumption 2.2, we obtain
Since by definition, it follows that
Therefore, (33) holds in the case .
We now proceed by induction and assume the inequality (33) to be true for some . Since
for all and , Lemma 4.2 yields
for all and . In other words, the unsaturation condition (4) is satisfied for all until .
Fix . Recall that the dynamics of agent is given by (6). First we show that the error due to sampling, which is defined by (7), satisfies
| (34) |
for all . Suppose that satisfies
Since and by definition, it follows that
where is defined by (2.3). The triggering mechanism (12) guarantees that
and hence (34) holds when .
Let us consider the case where satisfies
By definition, . Therefore, Proposition 3.3.d) yields
for some with . Since the unsaturation condition (4) is satisfied until , the equations (9) and (10) yield
| (35) |
By definition,
| (36) |
For each and , Proposition 3.3.a), c), and e) give
and hence
| (37) |
Combining (35) with the inequalities (36) and (37), we obtain
Since , we see from the definition (30) of that
Hence, the inequality (34) holds also when .
Next we study for , where is defined as in (8) and is the error due to quantization. Since the unsaturation condition (4) is satisfied until , we have that
for all . Proposition 3.3.e) shows that , which gives
for all . Hence
| (38) |
for all .
From the inequalities (34) and (38), we obtain
for all and . This and Lemma 3.1.a) with give
for all . Therefore, we have from Lemma 3.1.c) and d) that
| (39) |
for all . Since the condition (32) on yields
it follows that
| (40) |
Combining the inequalities (39) and (40), we obtain
for all . Thus for all . ∎
The condition obtained in Lemma 4.3 is in implicit form with respect to the decay parameter . We rewrite this condition in explicit form by using the Lambert -function. To this end, we define
| (41) |
where
for . Note also that
for all . Therefore, if the inequality holds, then one has
| (42) |
for all .
Lemma 4.4.
4.3. Main result
Before stating the main result of this section, we summarize the assumption on the parameters of the quantization scheme and the triggering mechanism.
Assumption 4.5.
Let upper bounds be given for all . The following three conditions are satisfied:
-
a)
The threshold and the number of quantization levels satisfy the inequality (42) for all .
- b)
- c)
Theorem 4.6.
Proof.
Since , Lemma 4.4 shows that the condition (32) on is satisfied. By Lemmas 4.2 and 4.3, we obtain
| (44) |
for all and . Therefore, the unsaturation condition (4) is satisfied for all and . The inequality (44) and the definition (29) of give
for all and . Thus, achieves consensus exponentially with decay rate . ∎
Recall that the maximum decay parameter is the minimum of
which is the solution of the equation see the proof of Lemma 4.4. Moreover, becomes smaller as decreases, and becomes larger as decreases. Therefore, becomes larger as , , and decreases and as increases. This also means that if agent has a large , i.e., many neighbors, then we need to use small and in order to achieve fast consensus of the multi-agent system.
Remark 4.7.
Remark 4.8.
To check the conditions obtained in Theorem 4.6, the global network parameters, and , are needed. In addition, the quantization range is common to all agents as the scaling parameter of finite-level dynamic quantizers studied, e.g., in the previous works [40, 41]. These are drawbacks of the proposed method.
Remark 4.9.
Although the proposed method is inspired by the self-triggered consensus algorithm presented in [14], the approach to consensus analysis differs. In [14], a Lyapunov function and LaSalle’s invariance principle have been employed. In contrast, we develop a trajectory-based approach, where the semi-contractivity property of plays a key role. Moreover, we discuss the convergence speed of consensus, by using the global parameters mentioned in Remark 4.8 above. The utilization of the global parameters also enables us to investigate the minimum inter-event time in a way different from that of [14].
4.4. Bounds of
We use the constant in the definition (29) of and the conditions for consensus given in Assumption 4.5. To apply the proposed method, we have to compute numerically by (25) or replace with an available upper bound of . In the next proposition, we provide bounds of by using the network size. The proof can be found in Appendix A.
Proposition 4.10.
Let satisfy and let be a connected undirected graph with vertices. Define . Then the following statements hold for defined as in (25):
-
a)
For all ,
-
b)
If is a complete graph, then
for all .
We conclude this section by using Proposition 4.10.b) to examine the relationship between the network size of complete graphs and the design parameters for quantization and self-triggered sampling. For real-valued functions on , we write
if there are and such that for all ,
Example 4.11.
Let be a complete graph with vertices.
Sensing accuracy: By Proposition 4.10.b), one can set
We see from the condition (42) that if the number of the quantization levels satisfies
| (45) |
then the quantized self-triggered multi-agent system achieves consensus exponentially for some threshold . Hence, the required sensing accuracy for asymptotic consensus is as .
Number of indices for data transmission: Recall that the agents send the sum of relative state measurements to all neighbors for the computation of sampling times. The number of indices used for this communication is
where and satisfy and
for all , respectively. Hence, the required number of indices for asymptotic consensus is as .
5. Computation of Sampling Times
In this section, we describe how the agents compute sampling times in a self-triggered fashion. We discuss an initial candidate of the next sampling time and then the first update of the candidate, followed by the -th update. Finally, we present a joint algorithm for quantization and self-triggering sampling.
5.1. Initial candidate of the next sampling time
First, agent updates at time . If the neighbor also updates at time , then agent receives . Next, agent computes a candidate of the inter-event time,
where
By (36) and (37), . Agent takes as an initial candidate of the next sampling time. If agent does not receive an updated from any neighbors on the interval , then is the next sampling time, that is, agent updates at .
Using the Lambert -function, one can write more explicitly. To see this, we first note that the solution of the equation
is written as
Define the function by
for and . We also set
| (46) | ||||
Since
we have . Hence
| (47) |
5.2. First update
If agent receives an updated from some neighbor by , then agent must recalculate a candidate of the next sampling time as in the self-triggered method proposed in [14]. We will now consider this scenario, i.e., the case
where is defined as in Section 3.2. Let be the first instant at which agent receives updated data after . Since , one can write as
Note that agent may receive updated data from several neighbors at time .
By using the new data, agent computes the following inter-event time at time :
where
Then is a new candidate of the next sampling time. By (36) and (37), we obtain
As in the initial case, if agent does not receive an updated from any neighbors on the interval , then is the next sampling time. Otherwise, agent computes the next sampling time again in the same way.
One can rewrite by using the Lambert -function. To see this, we define
Then
From the definition of and , we obtain
If the product satisfies , then the condition
| (48) |
can be written as
and hence .
Next we consider the case . In this case, the condition (48) is equivalent to
For the latter inequality, we have that
It may also occur that
To see this, we first observe that
| (49) |
Let be the secondary branch of the Lambert -function, i.e., is the solution of the equation for . We obtain the infimum of the set in (49) from the following proposition, whose proof is given in Appendix B.
Proposition 5.1.
Let . Then
5.3. -th update
Let and let
We consider the case where agent receives new data from its neighbors at times before the next candidate sampling times.
At time , agent computes
| (50) |
where
| (51) | ||||
and takes as a new candidate of the next sampling time. We have
| (52) |
as in the first update explained above. Since satisfies
only a finite number of data transmissions from neighbors occur until the next sampling time.
The next theorem shows that when the neighbors do not update the measurements on the interval , the candidate of the next sampling times constructed as above coincides with the next sampling time computed from the triggering mechanism (12).
Theorem 5.2.
Let and . Let and be as above, and assume that agent does not receive any measurements from its neighbors on the interval . Then
| (53) |
where is defined by (12) with
5.4. Algorithm for quantization and self-triggered sampling
We are now ready to present a joint algorithm for finite-level dynamic quantization and self-triggered sampling. Under this algorithm, the unsaturation condition (4) is satisfied for all and , and the multi-agent system achieves consensus exponentially with decay rate ; see Theorems 4.6 and 5.2. Moreover, the inter-event times are bounded from below by the constant for all and .
Algorithm 5.3 (Action of agent on the sampling interval ).
Step 0.
Choose the threshold
and the number , ,
of quantization levels such that the inequality
(42) holds
for all .
Choose
the upper bounds
of inter-event times and
the decay parameter of the quantization
range such that , where is defined as in
(41).
Step 1. At time , agent performs the following actions i)–v).
-
i)
Measure the quantized relative state for all and deactivate the sensor.
-
ii)
Encode the sum of the quantized measurements to an index in a finite set with cardinality and transmit the index to each neighbor .
-
iii)
If an index is received from a neighbor at time , then decode the index and update the sum of the relative state measurements of the neighbor.
- iv)
-
v)
Set .
Step 2. Agent plans to activate the sensor at time .
Step 3-a. If agent receives an index from some neighbor on the interval , then agent performs the following actions i)–iii). Then go back to Step 2.
-
i)
Set to and store the time at which the index is received.
-
ii)
Decode the index and update the sum of the relative state measurements of the neighbor. If several indices are received at time , then this action is applied to all indices.
- iii)
Step 3-b. If agent does not receive any indices on the interval , then agent sets .
Step 4. Agent sets to . Then go back to Step 1.
Remark 5.4.
The proposed method takes advantage of the simplicity of the first-order dynamics in the following way. Assume that the dynamics of agent is given by
where and . Then the error due to sampling is written as
for . Since in general, the absolute state is required to describe the error . However, one has in the first-order case , and hence the absolute state needs not be measured in the proposed algorithm. Moreover, since the input is constant on the sampling interval, the integral term is a linear function with respect to in the first-order case . This enables us to use the Lambert -function for the computation of sampling times.
6. Numerical simulation
In this section, we consider the connected network shown in Figure 1, where the number of agents is .
For each , the initial state is given by . Since
a bound in Assumption 2.2 is chosen as . We set
and then numerically compute , where is defined by (25).
The threshold and the upper bound of inter-event times for the triggering mechanism (12) are given by
respectively. The reason why agents and have smaller thresholds and upper bounds of inter-event times is that these agents have more neighbors than others. For these thresholds, the minimum odd number satisfying the condition (42) for all is . By Theorem 4.6, if the number of quantization levels is odd and satisfies , then the multi-agent system achieves consensus exponentially for a suitable decay parameter of the quantization range . We use for the simulation below. Then with is given by . When each agent knows
as a bound of the number of neighbors, as stated in Assumption 2.3, the number of quantization levels for the transmission of the sum of the relative states is
which can be represented by bits. Under this setting of the parameters , , , and , the maximum decay parameter , which is defined as in (41), is given by
In the simulation, we set .
Using the Lambert -function, we can compute a lower bound of inter-event times by (31):
Note, however, that these lower bounds are not used for the real-time computation of inter-event times, because all candidates of the inter-event times computed by the agents are greater than or equal to these lower bounds as shown in Section 5.
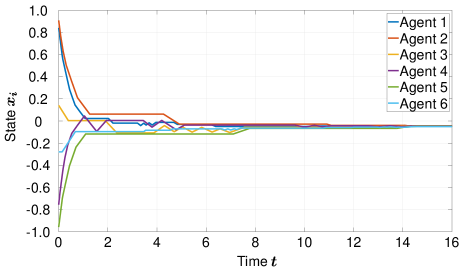
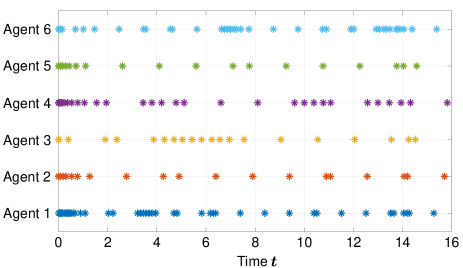
The state trajectory and the corresponding sampling times of each agent are shown in Figures 2 and 3, respectively, where the simulation time is and the time step is . From Figure 2, we see that the deviation of each state from the average state converges to zero. Figure 3 shows that sampling occurs frequently on the interval but less frequently on the interval . Agent measures relative states more frequently on the interval than on other intervals. This is because the state of agent oscillates due to coarse quantization. Such oscillations can be observed also for other agents, e.g., agent on the interval . Moreover, we find in Figure 2 that the states of agents and do not change on the intervals and , respectively. This is also caused by coarse quantization. In fact, the quantized values of their relative state measurements are zero on these intervals. However, the proposed algorithm ensures that the quantization errors exponentially converge to zero, and hence the multi-agent system achieves asymptotic consensus.
7. Conclusion
We have proposed a joint design method of a finite-level dynamic quantizer and a self-triggering mechanism for asymptotic consensus by relative state information. The inter-event times are bounded from below by a strictly positive constant, and the sampling times can be computed efficiently by using the Lambert -function. The quantizer has been designed so that saturation is avoided and quantization errors exponentially converge to zero. The new semi-norm introduced for the consensus analysis is constructed based on the maximum norm, and the matrix exponential of the negative Laplacian matrix has the semi-contractivity property with respect to the semi-norm. Future work will focus on extending the proposed method to the case of directed graphs and agents with high-order dynamics.
8. Acknowledgments
This work was supported by JSPS KAKENHI Grant Number JP20K14362.
References
- [1] Fax, J.A., Murray, R.M.: ‘Information flow and cooperative control of vehicle formations’, IEEE Trans Automat Control, 2004, 49, pp. 1465–1476
- [2] Olfati.Saber, R., Shamma, J.S. ‘Consensus filters for sensor networks and distributed sensor fusion’. In: Proc. 44th IEEE Conf. Decis. Control, 2005. pp. 6698–6703
- [3] Olfati-Saber, R., Murray, R.M.: ‘Consensus problems in networks of agents with switching topology and time-delays’, IEEE Trans Automat Control, 2004, 49, pp. 1520–1533
- [4] Olfati-Saber, R., Fax, J.A., Murray, R.M.: ‘Consensus and cooperation in networked multi-agent systems’, Proc IEEE, 2007, 95, pp. 215–233
- [5] Chen, F., Ren, W.: ‘On the control of multi-agent systems: A survey’, Found Trends Syst Control, 2019, 6, pp. 339–499
- [6] Årzén, K.E. ‘A simple event-based PID controller’. In: Proc. 14th IFAC World Congress. vol. 18, 1999. pp. 423–428
- [7] Tabuada, P.: ‘Event-triggered real-time scheduling of stabilizing control tasks’, IEEE Trans Automat Control, 2007, 52, pp. 1680–1685
- [8] Heemels, W.P.M.H., Sandee, J., van den Bosch, P.: ‘Analysis of event-driven controllers for linear systems’, Int J Control, 2008, 81, pp. 571–590
- [9] Velasco, M., Fuertes, J., Marti, P. ‘The self triggered task model for real-time control systems’. In: Proc. 24th IEEE Real-Time Syst. Symp, 2003. pp. 67–70
- [10] Wang, X., Lemmon, M.D.: ‘Self-triggered feedback control systems with finite-gain stability’, IEEE Trans Automat Control, 2009, 54, pp. 452–467
- [11] Anta, A., Tabuada, P.: ‘To sample or not to sample: Self-triggered control for nonlinear systems’, IEEE Trans Automat Control, 2010, 55, pp. 2030–2042
- [12] Dimarogonas, D.V., Frazzoli, E., Johansson, K.H.: ‘Distributed event-triggered control for multi-agent systems’, IEEE Trans Automat Control, 2012, 57, pp. 1291–1297
- [13] Seyboth, G.S., Dimarogonas, D.V., Johansson, K.H.: ‘Event-based broadcasting for multi-agent average consensus’, Automatica, 2013, 49, pp. 245–252
- [14] Fan, Y., Liu, L., Feng, G., Wang, Y.: ‘Self-triggered consensus for multi-agent systems with Zeno-free triggers’, IEEE Trans Automat Control, 2015, 60, pp. 2779–2784
- [15] Yi, X., Liu, K., Dimarogonas, D.V., Johansson, K.H.: ‘Dynamic event-triggered and self-triggered control for multi-agent systems’, IEEE Trans Automat Control, 2019, 64, pp. 3300–3307
- [16] Liu, K., Ji, Z.: ‘Dynamic event-triggered consensus of general linear multi-agent systems with adaptive strategy’, IEEE Trans Circuits Syst II, Exp Briefs, 2022, 69, pp. 3440–3444
- [17] Ding, L., Han, Q.L., Ge, X., Zhang, X.M.: ‘An overview of recent advances in event-triggered consensus of multiagent systems’, IEEE Trans Cybern, 2018, 48, pp. 1110–1123
- [18] Nowzari, C., Garcia, E., Cortés, J.: ‘Event-triggered communication and control of networked systems for multi-agent consensus’, Automatica, 2019, 105, pp. 1–27
- [19] Dimarogonas, D.V., Johansson, K.H.: ‘Stability analysis for multi-agent systems using the incidence matrix: Quantized communication and formation control’, Automatica, 2010, 46, pp. 695–700
- [20] Ceragioli, F., De Persis, C., Frasca, P.: ‘Discontinuities and hysteresis in quantized average consensus’, Automatica, 2011, 47, pp. 1916–1928
- [21] Liu, S., Li, T., Xie, L., Fu, M., Zhang, J.F.: ‘Continuous-time and sampled-data-based average consensus with logarithmic quantizers’, Automatica, 2013, 49, pp. 3329–3336
- [22] Guo, M., Dimarogonas, D.V.: ‘Consensus with quantized relative state measurements’, Automatica, 2013, 49, pp. 2531–2537
- [23] Wu, Y., Wang, L.: ‘Average consensus of continuous-time multi-agent systems with quantized communication’, Int J Robust Nonlinear Control, 2014, 24, pp. 3345–3371
- [24] Li, J., Ho, D.W.C., Li, J.: ‘Adaptive consensus of multi-agent systems under quantized measurements via the edge Laplacian’, Automatica, 2018, 92, pp. 217–224
- [25] Xu, T., Duan, Z., Sun, Z., Chen, G.: ‘A unified control method for consensus with various quantizers’, Automatica, 2022, 136, Art. no. 110090
- [26] Garcia, E., Cao, Y., Yu, H., Antsaklis, P., Casbeer, D.: ‘Decentralised event-triggered cooperative control with limited communication’, Int J Control, 2013, 86, pp. 1479–1488
- [27] Zhang, Z., Zhang, L., Hao, F., Wang, L.: ‘Distributed event-triggered consensus for multi-agent systems with quantisation’, Int J Control, 2015, 88, pp. 1112–1122
- [28] Zhang, Z., Zhang, L., Hao, F., Wang, L.: ‘Periodic event-triggered consensus with quantization’, IEEE Trans Circuits Syst II, Expr Briefs, 2016, 63, pp. 406–410
- [29] Yi, X., Wei, J., Johansson, K.H. ‘Self-triggered control for multi-agent systems with quantized communication or sensing’. In: Proc. 55th IEEE Conf. Decis. Control, 2016. pp. 2227–2232
- [30] Liu, Q., Qin, J., Yu, C. ‘Event-based multi-agent cooperative control with quantized relative state measurements’. In: Proc. 55th IEEE Conf. Decis. Control, 2016. pp. 2233–2239
- [31] Wu, Z.G., Xu, Y., Pan, Y.J., Su, H., Tang, Y.: ‘Event-triggered control for consensus problem in multi-agent systems with quantized relative state measurements and external disturbance’, IEEE Trans Circuits Syst I, Reg Papers, 2018, 65, pp. 2232–2242
- [32] Dai, M.Z., Xiao, F., Wei, B.: ‘Event-triggered and quantized self-triggered control for multi-agent systems based on relative state measurements’, J Frankl Inst, 2019, 356, pp. 3711–3732
- [33] Li, K., Liu, Q., Zeng, Z.: ‘Quantized event-triggered communication based multi-agent system for distributed resource allocation optimization’, Inf Sci, 2021, 577, pp. 336–352
- [34] Dai, M.Z., Fu, W., Zhao, D.J., Zhang, C. ‘Distributed self-triggered control with quantized edge state sampling and time delays’. In: Advances in Guidance, Navigation and Control. (Singapore: Springer, 2022. pp. 883–894
- [35] Wang, F., Li, N., Yang, Y.: ‘Quantized-observer based consensus for fractional order multi-agent systems under distributed event-triggered mechanism’, Math Comput Simul, 2023, 204, pp. 679–694
- [36] De Persis, C., Frasca, P.: ‘Robust self-triggered coordination with ternary controllers’, IEEE Trans Automat Control, 2013, 58, pp. 3024–3038
- [37] Matsume, H., Wang, Y., Ishii, H.: ‘Resilient self/event-triggered consensus based on ternary control’, Nonlinear Anal: Hybrid Systems, 2021, 42, Art. no. 101091
- [38] Golestani, F., Tavazoei, M.S.: ‘Event-based consensus control of Lipschitz nonlinea rmulti-agent systems with unknown input delay and quantization constraints’, Eur Phys J Spec Top, 2022, 231, pp. 3977–3985
- [39] Carli, R., Bullo, F., Zampieri, S.: ‘Quantized average consensus via dynamic coding/decoding schemes’, Int J Robust Nonlinear Control, 2010, 20, pp. 156–175
- [40] Li, T., Fu, M., Xie, L., Zhang, J.F.: ‘Distributed consensus with limited communication data rate’, IEEE Trans Automat Control, 2011, 56, pp. 279–292
- [41] You, K., Xie, L.: ‘Network topology and communication data rate for consensusability of discrete-time multi-agent systems’, IEEE Trans Automat Control, 2011, 56, pp. 2262–2275
- [42] Li, D., Liu, Q., Wang, X., Yin, Z.: ‘Quantized consensus over directed networks with switching topologies’, Syst Control Lett, 2014, 65, pp. 13–22
- [43] Qiu, Z., Xie, L., Hong, Y.: ‘Quantized leaderless and leader-following consensus of high-order multi-agent systems with limited data rate’, IEEE Trans Automat Control, 2016, 61, pp. 2432–2447
- [44] Ma, J., Ji, H., Sun, D., Feng, G.: ‘An approach to quantized consensus of continuous-time linear multi-agent systems’, Automatica, 2018, 91, pp. 98–104
- [45] Chen, X., Liao, X., Gao, L., Yang, S., Wang, H., Li, H.: ‘Event-triggered consensus for multi-agent networks with switching topology under quantized communication’, Neurocomputing, 2017, 230, pp. 294–301
- [46] Ma, J., Liu, L., Ji, H., Feng, G.: ‘Quantized consensus of multiagent systems by event-triggered control’, IEEE Trans Syst, Man, Cybern: Syst, 2018, 50, pp. 3231–3242
- [47] Yu, P., Dimarogonas, D.V.: ‘Explicit computation of sampling period in periodic event-triggered multiagent control under limited data rate’, IEEE Trans Control Netw Syst, 2019, 6, pp. 1366–1378
- [48] Lin, N., Ling, Q.: ‘Bit-rate conditions for the consensus of quantized multiagent systems based on event triggering’, IEEE Trans Cybern, 2022, 52, pp. 116–127
- [49] Lin, N., Ling, Q.: ‘An event-triggered consensus protocol for quantized second-order multi-agent systems with network delay and process noise’, ISA Trans, 2022, 125, pp. 31–41
- [50] Feng, S., Ishii, H.: ‘Dynamic quantized consensus of general linear multi-agent systems under denial-of-service attacks’, IEEE Trans Control Network Systems, 2022, 9, pp. 562–574
- [51] Rikos, A.I., Hadjicostis, C.N.: ‘Event-triggered quantized average consensus via ratios of accumulated values’, IEEE Trans Automat Control, 2021, 66, pp. 1293–1300
- [52] Rikos, A.I., Charalambous, T., Johansson, K.H., Hadjicostis, C.N.: ‘Distributed event-triggered algorithms for finite-time privacy-preserving quantized average consensus’, IEEE Trans Control Network Systems, 2023, 10, pp. 38–50
- [53] Horaud, R., Hansard, M., Evangelidis, G., Ménier, C.: ‘An overview of depth cameras and range scanners based on time-of-flight technologies’, Mach Vis Appl, 2016, 27, pp. 1005–1020
- [54] Spong, M.W., Hutchinson, S., Vidyasagar, M.: ‘Robot Modeling and Control’. 2nd ed. (Hoboken, NJ, USA: Wiley, 2020)
- [55] Corless, R.M., Gonnet, G.H., Hare, D.E., Jeffrey, D.J., Knuth, D.E.: ‘On the Lambert function’, Adv Comput Math, 1996, 5, pp. 329–359
- [56] Brockett, R.W., Liberzon, D.: ‘Quantized feedback stabilization of linear systems’, IEEE Trans Automat Control, 2000, 45, pp. 1279–1289
- [57] Liberzon, D.: ‘Hybrid feedback stabilization of systems with quantized signals’, Automatica, 2003, 39, pp. 1543–1554
- [58] Jafarpour, S., Cisneros.Velarde, P., Bullo, F.: ‘Weak and semi-contraction for network systems and diffusively coupled oscillators’, IEEE Trans Automat Control, 2022, 67, pp. 1285–1300
- [59] De Pasquale, G., Smith, K.D., Bullo, F., Valcher, M.E. ‘Dual seminorms, ergodic coefficients and semicontraction theory’, to appear in IEEE Trans Automat Control 2023
- [60] Pazy, A.: ‘Semigroups of Linear Operators and Applications to Partial Differential Equations’. (New York: Springer, 1983)
Appendix A: Proof of Proposition 4.10
Let , and let , , , and be as in the proof of Lemma 4.1.
a) The inequality
has already been proved in (26). It remains to show that
Since is orthogonal, we have . Hence,
Moreover, and
Therefore, the inequality (24) yields
b) Suppose that is a complete graph. Then
If , then
for all . Hence, it suffices by a) to show that
| (A1) |
Appendix B: Proof of Proposition 5.1
Define the function by
Then
Since
it follows that holds at . From the assumption , we have . Therefore, there exists such that if and only if
| (B1) |
Since
it follows that (B1) is equivalent to
| (B2) |
Hence,
if (B2) does not hold.
The inequality can be written as
| (B3) |
Let and be the primary and secondary branch of the Lambert -function, respectively. In other words, and are the solutions and of the equation for , respectively. For each ,
| (B4) |
see, e.g., [55].