Stability of rotating gaseous stars
Abstract
We consider stability of rotating gaseous stars modeled by the Euler-Poisson system with general equation of states. When the angular velocity of the star is Rayleigh stable, we proved a sharp stability criterion for axi-symmetric perturbations. We also obtained estimates for the number of unstable modes and exponential trichotomy for the linearized Euler-Poisson system. By using this stability criterion, we proved that for a family of slowly rotating stars parameterized by the center density with fixed angular velocity, the turning point principle is not true. That is, unlike the case of non-rotating stars, the change of stability of the rotating stars does not occur at extrema points of the total mass. By contrast, we proved that the turning point principle is true for the family of slowly rotating stars with fixed angular momentum distribution. When the angular velocity is Rayleigh unstable, we proved linear instability of rotating stars. Moreover, we gave a complete description of the spectra and sharp growth estimates for the linearized Euler-Poisson equation.
1 Introduction
Consider a self-gravitating gaseous star modeled by the Euler-Poisson system of compressible fluids
| (1.1) |
where is the density, is the velocity, is the pressure, and is the self-consistent gravitational potential. Assume satisfies:
| (1.2) |
and there exists such that
| (1.3) |
The assumption (1.3) implies that the pressure for near 0. We note that for realistic stars.
The Euler-Poisson system (1.1) has many steady solutions. The simplest one is the spherically symmetric non-rotating star with . We refer to [30] and references therein for the existence and stability of non-rotating stars. A turning point principle (TPP) was shown in [30] that the stability of the non-rotating stars is entirely determined by the mass-radius curve parameterized by the center density. In particular, the stability of a non-rotating star can only change at extrema (i.e. local maximum or minimum points) of the total mass.
We consider axi-symmetric rotating stars of the form
where are the cylindrical coordinates, is the angular velocity and denote unit vectors along directions. We note that for barotropic equation of states , it was known as Poincaré-Wavre theorem ([45, Section 4.3]) that the angular velocity must be independent of . The existence and stability of rotating stars is a classical problem in astrophysics. For homogeneous (i.e. constant density) rotating stars, it had been extensively investigated since the work of Maclaurin in 1740s, by many people including Dirichlet, Jacobi, Riemann, Poincaré and Chandrasekhar etc. We refer to the books [7, 21] for history and results on this topic. The compressible rotating stars are much less understood. From 1920s, Lichtenstein initiated a mathematical study of compressible rotating stars, which was summarized in his monograph ([27]). In particular, he showed the existence of slowly rotating stars near non-rotating stars by implicit function theorem. See also [14, 17, 18, 19, 41] for related results. The existence of rotating stars can also be established by variational methods ([2, 5, 9, 10, 11, 26, 31, 33]), or global bifurcation theory ([1, 42, 43]). Compared with the existence theory, there has been relatively few rigorous works on the stability of rotating stars. In this paper, we consider the stability of rotating stars under axi-symmetric perturbations. There are two natural questions to address: 1) Does TPP still hold for a family of rotating stars? 2) How does the rotation affect the stability (instability) of rotating stars?
The answers to these two questions have been disputed in the astrophysical literature. Bisnovaty-Kogan and Blinnikov [4] suggested that for a family of rotating stars with fixed angular momentum distribution per unit mass and parameterized by the center density , TPP is true (i.e. stability changes at the extrema of the total mass). They used heuristic arguments (so called static method) as in the non-rotating case. Such arguments suppose that at the transition point of stability, there must exist a zero frequency mode which can only be obtained by infinitesimally transforming equilibrium configurations near the given one, without changing the total mass . Hence, the transition point is a critical point of the total mass (i.e. ). It is reasonable to study the family of rotating stars with fixed angular momentum distribution, which is invariant under Euler-Poisson dynamics. In [4], they also considered a family of rigidly rotating stars (i.e. is constant) for a special equation of state similar to white dwarf stars. By embedding each rigidly rotating star into a family with the same angular momentum distribution and with some numerical help, it was found that the transition of stability is not the extrema of mass. In [40], for a family of rotating stars with fixed rotational parameter (i.e. the ratio of rotational energy to gravitational energy), similar arguments as in [4] were used to indicate that TPP is true for this family and their numerical results suggested that instability occurs beyond the first mass extrema. However, up to date there is no rigorous proof or disproof of TPP for different families of rotating stars.
The issue that whether rotation can have a stabilizing effect on rotating stars has long been in debate. For a long time, it was believed that rotation is stabilizing for any angular velocity profile. This conviction was based on conclusions drawn from perturbation analysis near neutral modes of non-rotating stars, which was done by Ledoux [25] for rigidly rotating stars and by Lebovitz [24] for general angular velocities. However, the later works of Sidorov [38, 39] and Kähler [22] showed that rotating could be destabilizing. Hazlehurst [13] argued that the advocates of destabilization of rotation had used an argument that is open to criticism and disagreed that rotation could be destabilizing.
In this paper, we answer above two questions in a rigorous way. To state our results more precisely, we introduce some notations. Let be an axi-symmetric rotating star solution of (1.1). The support of is denoted by , which is an axi-symmetric bounded domain. The rotating star solutions satisfy
| (1.4) |
| (1.5) |
Equivalently,
| (1.6) |
where is a constant.
Let be the maximum of such that . We assume , is with positive curvature near , and for any near
| (1.7) |
which are satisfied for slowly rotating stars near non-rotating stars as constructed in ([14, 17, 19, 41]). Let and , where and are axi-symmetric weighted spaces in with weights and . The enthalpy is defined by
Denote . Define the Rayleigh discriminant .
For Rayleigh stable angular velocity satisfying for , the linearization of the axi-symmetric Euler-Poisson equations at can be written in a Hamiltonian form
| (1.8) |
where and , and are perturbations of density and -components of velocity respectively. The operators
| (1.9) |
are off-diagonal anti-self-dual and diagonal self-dual operators respectively, where
| (1.10) |
with
| (1.11) |
| (1.12) |
, and . More precise definition and properties of these operators can be found in Section 2.2.
Our main result for the Rayleigh stable case is the following.
Theorem 1.1
Assume , , (1.7), is and has positive curvature near . Then the operator defined by (1.9) generates a group of bounded linear operators on and there exists a decomposition
of closed subspaces satisfying the following properties:
i) are invariant under .
ii) only consists of eigenvectors corresponding to positive (negative) eigenvalues of and
where is a bounded bilinear quadratic form on defined by
| (1.13) |
for any and denotes the number of negative modes of restricted to the subspace
| (1.14) |
Corollary 1.1
Under the assumptions of Theorem 1.1, the rotating star solution is spectrally stable to axi-symmetric perturbations if and only if
for all with .
Theorem 1.1 gives not only a sharp stability criteria for rotating stars with Rayleigh stable angular velocity, but also more detailed information on the spectra of the linearized Euler-Poisson operator and exponential trichotomy estimates for the linearized Euler-Poisson system. These will be useful for the future study of nonlinear dynamics near unstable rotating stars, particularly, the construction of invariant (stable, unstable and center) manifolds for the nonlinear Euler-Poisson system.
The sharp stability criterion in Corollary 1.1 is used to study the stability of two families of slowly rotating stars. For the first family of slowly rotating stars with fixed Rayleigh stable angular velocity and parameterized by the center density, we show that TPP is not true and the transition of stability does not occur at the first mass extrema. More precisely, for fixed , for some , satisfying and small enough, by implicit function theorem as in [14, 18, 41], there exists a family of slowly rotating stars parameterized by the center density . We show that the transition of stability for this family is not at the first extrema of the total mass . In particular, when , the slowly rotating stars are stable for small center density and remain stable slightly beyond the first mass maximum. This is consistent with the numerical evidence in [4] (Figure 10, p. 400) for the example of rigidly rotating stars and an equation of state with . It shows that Rayleigh stable rotation is indeed stabilizing for rotating stars. By contrast, for the second family of slowly rotating stars with fixed monotone increasing angular momentum distribution (equivalently Rayleigh stable angular velocity), we show that TPP is indeed true. More precisely, for fixed satisfying , and sufficiently small, there exists a family of slowly rotating stars parameterized by the center density , where
is the mass distribution in the cylinder, and is the total mass. We show that the transition of stability for this family of rotating stars exactly occurs at the first extrema of the total mass . This not only confirms the claim in [4] based on heuristic arguments when , but also can apply to other examples studied in the literature, including (see [2, 18, 31, 32]) and (see [35]).
The issue of TPP is also not so clear for relativistic rotating stars. For relativistic stars, TPP was shown for the secular stability of a family of rigidly rotating stars ([12]), while numerical results in [44] indicated that the transition of dynamic instability does not occur at the mass maximum (i.e. TPP is not true) for such a family. Our approach for the Newtonian case might be useful for studying the relativistic case.
For the Rayleigh stable case, the stability of rotating stars is studied by using the separable Hamiltonian framework as in the non-rotating stars ([30]). However, there are fundamental differences between these two cases. For the non-rotating stars, the stability condition is reduced to find , that is, the number of negative modes of restricted to , where and are defined in (1.11) and (1.14) respectively. We note that the dynamically accessible space (for density perturbation) is one co-dimensional with only the mass constraint. For the rotating stars, by using the separable Hamiltonian formulation (1.8), the stability is reduced to find , where are defined in (1.10) and (1.12) respectively. Here, the dynamically accessible space (for density and -component of velocity) is infinite co-dimensional, which corresponds to perturbations preserving infinitely many generalized total angular momentum (2.11) in the first order. It is hard to compute the negative modes of with such infinitely many constraints. A key point in our proof is to find a reduced functional defined in (1.13) for density perturbation such that , where denotes the density perturbations preserving the mass as in the non-rotating case. Therefore, the computation of negative modes of with infinitely many constraints is reduced to study with only one mass constraint. This reduced stability criterion in terms of is crucial to prove or disprove TPP for different families of rotating stars.
Next we consider rotating stars with Rayleigh unstable angular velocity . That is, there exists a point such that . In this case, we cannot write the linearized Euler-Poisson system as a separable linear Hamiltonian PDEs since is not defined at . Instead, we use the following second order system for
| (1.15) |
where
are self-adjoint operators on . The following properties of the spectra of are obtained in Proposition 4.1: i) where ; ii) There are finitely many negative eigenvalues and infinitely many positive eigenvalues outside the interval . In particular, the infimum of is negative, which might correspond to either discrete or continuous spectrum.
Define the space
with the norm
| (1.16) |
Theorem 1.2
Assume , (1.7) and . Let be the minimum of . Then we have:
i) Equation (1.15) defines a group , , on . There exists such that for any ,
| (1.17) |
The flow conserves the total energy
| (1.18) |
ii) For any , there exists initial data such that
| (1.19) |
The above theorem shows that rotating stars with Rayleigh unstable angular velocity are always linearly unstable. The maximal growth rate is obtained either by a discrete eigenvalue beyond the range of or by unstable continuous spectrum due to Rayleigh instability (i.e. negative ). In [24], it was shown that for slowly rotating stars with any angular velocity profile, discrete unstable modes cannot be perturbed from neutral modes of non-rotating stars. However, the unstable continuous spectrum was not considered there.
We briefly mention some recent mathematical works on the stability of rotating gaseous stars. The conditional Lyapunov stability of some rotating star constructed by variational methods had been obtained by Luo and Smoller [31, 32, 33, 34] under Rayleigh stability assumption, also called Sölberg stability criterion in their works.
The paper is organized as follows. In Section 2, we study rotating stars with Rayleigh stable angular velocity and prove the sharp stability criterion. In Section 3, we use the stability criterion to prove/disprove TPP for two families of slowly rotating stars. In Section 4, we prove linear instability of rotating stars with Rayleigh unstable angular velocity.
Throughout this paper, for we use to denote the estimate for some constant independent of , to denote the estimate for some constants , and to denote for some small enough.
2 Stability criterion for Rayleigh Stable case
In this section, we consider rotating stars with Rayleigh stable angular velocity profiles. The linearized Euler-Poisson system is studied by using a framework of separable Hamiltonian systems in [30]. First, we give a summary of the abstract theory in [30].
2.1 Separable Linear Hamiltonian PDEs
Consider a linear Hamiltonian PDEs of the separable form
| (2.1) |
where and are real Hilbert spaces. We briefly describe the results in [30] about general separable Hamiltonian PDEs (2.1). The triple is assumed to satisfy assumptions:
-
(G1)
The operator and its dual operator are densely defined and closed (and thus ).
-
(G2)
The operator is bounded and self-dual (i.e. and thus is a bounded symmetric bilinear form on ). Moreover, there exist such that
-
(G3)
The operator is bounded and self-dual (i.e. etc.) and there exists a decomposition of into the direct sum of three closed subspaces
satisfying
-
(G3.a)
for all ;
-
(G3.b)
there exists such that
-
(G3.a)
We note that the assumptions and can be relaxed (see [30]). But these simplified assumptions are enough for the applications to Euler-Poisson system studied in this section under the Rayleigh stability assumption (i.e. for all ). If the Rayleigh unstable assumption holds (i.e. for some ), then and we will discuss this in Section 4.
Theorem 2.1
[30]Assume (G1-3) for (2.1). The operator generates a group of bounded linear operators on and there exists a decomposition
of closed subspaces with the following properties:
i) are invariant under .
ii) only consists of eigenvectors corresponding to negative (positive) eigenvalues of and
where denotes the number of negative modes of . If , then there exists such that
| (2.2) |
where .
iii) The quadratic form vanishes on , i.e. for all , but is non-degenerate on , and
There exists such that
| (2.3) |
iv) Suppose is non-degenerate on , then for some . Namely, there is Lyapunov stability on the center space .
Remark 2.1
Above theorem shows that the solutions of (2.9) are spectrally stable if and only if . Moreover, equals to the number of unstable modes. The exponential trichotomy estimates (2.2)-(2.3) are important in the study of nonlinear dynamics near an unstable steady state, such as the proof of nonlinear instability or the construction of invariant (stable, unstable and center) manifolds. The exponential trichotomy can be lifted to more regular spaces if the spaces have higher regularity. We refer to Theorem 2.2 in [29] for more precise statements.
2.2 Hamiltonian formulation of linearized EP system
Consider an axi-symmetric rotating star solution . The support of density is denoted by
, which is an axi-symmetric bounded domain. Let be support
radius in , that is, the maximum of such that . We
choose the coordinate system such that . We make
the following assumptions:
i)
satisfies the Rayleigh stability condition (i.e. for
);
ii) is near
and has positive curvature (equivalently is locally
convex) at ;
iii) satisfies
(1.7).
The following lemma will be used later.
Lemma 2.1
Under Assumptions ii) and iii) above, for small enough we have
for any and .
Proof. By (1.7),
First, we consider the case when is the ball . Then for close to
| (2.4) | ||||
For general , let be the curvature of at and
be the osculating circle at . Then near , is approximated by to the 2nd order. For any , let be the intersection of with the vertical line , where . Then for small enough, we have
And for with ,
Then similar to (2.4), we have
Let , , , and . The linearized Euler-Poisson system for axi-symmetric perturbations around the rotating star solution is
| (2.5) |
with . Here, are perturbations of density and velocity.
Define the operators
and
| (2.6) |
where
| (2.7) |
and
| (2.8) |
Then the linearized Euler-Poisson system (2.5) can be written in a separable Hamiltonian form
| (2.9) |
where and . The operators
are off-diagonal anti-self-dual and diagonal self-dual respectively, where
First, we check that in (2.9) satisfy the assumptions (G1)-(G3) for the abstract theory in Section 2.1. The assumptions (G1) and (G2) can be shown by the same arguments in the proof of Lemma 3.5 in [30] and that is bounded. The Rayleigh stability condition implies that the operator is bounded, positive and self-dual. By the same proof of Lemma 3.6 in [30], we have the following lemma.
Lemma 2.2
There exists a direct sum decomposition and such that:
i)
ii) and in the inner product of .
The assumption (G3) readily follows from above lemma. Therefore, we can apply Theorem 2.1 to the linearized Euler-Poisson system (2.9). This proves the conclusions in Theorem 1.1 except for the formula , which will be shown later. Here, is the closure of in , and the operators are defined in (2.6)-(2.8).
Remark 2.2
In some literature [31, 32, 33, 34], the Rayleigh stability condition is for all . Here, we used the stability condition for all as in the astrophysical literature such as [4, 46]. If for all and only at some isolated points, let and the operator is bounded and positive. The linearized Euler-Poisson system can still be studied in the framework of separable Hamiltonian systems and similar results as in Theorem 1.1 can be obtained.
2.3 Dynamically accessible perturbations
By Theorem 1.1, the solutions of (2.9) are spectrally stable (i.e. nonexistence of exponentially growing solution) if and only if . More precisely, we have
Corollary 2.1
Assume , (1.7), and . The rotating star solution of Euler-Poisson system is spectrally stable if and only if
| (2.10) |
In this section, we discuss the physical meaning of above stability criterion by using the variational structure of the rotating stars.
For any solution of the axi-symmetric Euler-Poisson system (1.1), define the angular momentum and the generalized total angular momentum
| (2.11) |
for any function .
Lemma 2.3
For any , the functional is conserved for the Euler-Poisson system (1.1).
Proof. First, we note that the angular momentum is an invariant of the particle trajectory under the axi-symmetric force field . Let be the flow map of the velocity field with initial position , and be the Jacobian of . Then and
The steady state has the following variational structure. By the steady state equation (1.6), we have
| (2.12) |
where is the constant in (1.6) and satisfies the equation
| (2.13) |
The existence of satisfying (2.13) is ensured by the Rayleigh stable condition which implies that is monotone to . The equations (1.6) and (2.12) are equivalent since
due to (2.13) and integration by parts. Denote the the total energy by
which is conserved for the Euler-Poisson system (1.1). Define the energy-Casimir functional
where and are as in (2.12). Then is a critical point of , since
by equations (2.12) and (2.13). By direct computations,
| (2.14) | |||
where we used the identity
The functional (2.14) is a conserved quantity of the linearized Euler-Poisson system (2.9) due to the Hamiltonian structure. We note that the number of negative directions of (2.14) is given by .
We now turn to the spaces of and .
Lemma 2.4
It holds that
Proof. Since is spanned by constant functions, we have
It remains to show which is equivalent to . By Lemma 3.15 in [30], we have the orthogonal decomposition
where . For any , by the proof of Lemma 3.15 in [30], there exists a unique gradient field such that
By Proposition 12 in [20], we have
| (2.15) |
For any , let be the projection of to . Then above estimate (2.15) implies that
By Theorem 5.2 in [23, P. 231], this implies that
Definition 2.1
The perturbation is called dynamically accessible if .
In the next lemma, we give two equivalent characterizations of the dynamically accessible perturbations.
Lemma 2.5
For , the following statements are equivalent.
(i)
(ii)
| (2.16) |
(iii) and
| (2.17) |
Proof. First, we show (i) and (ii) are equivalent. We have , where the dual operator is defined in (2.7)-(2.8). Let be a function in , then
Since and is monotone to by the Rayleigh stability condition, we can write for some function . Then implies that . Thus is the closure of the set
in . Therefore, if and only if (2.16) is satisfied.
Next, we show (ii) and (iii) are equivalent. If (ii) is satisfied, by choosing we get . Then by (2.16) and integration by parts, we have
which implies (2.17) since is arbitrary. On the other hand, by reversing the above computation, (ii) follows from (iii).
The statement (ii) above implies that for any , we have
where the generalized angular momentum is defined in (2.11). That is, a dynamically accessible perturbation must lie on the tangent space of the functional at the equilibrium . Since is arbitrary, this implies infinite many constraints for dynamically accessible perturbations. The stability criterion (2.10) implies that that rotating stars are stable if and only if they are local minimizers of energy-Casimir functional under the constraints of fixed generalized angular momentum for all . This contrasts significantly with the case of non-rotating stars. It was shown in ([30]) that non-rotating stars are stable if and only if they are local minimizers of the energy-Casimir functional under the only constraint of fixed total mass. The stability criterion (2.10) for rotating stars involves infinitely many constraints and is much more difficult to check. In the next section, we give an equivalent stability criterion in terms of a reduced functional (1.13) under only the mass constraint.
Remark 2.3
For non-rotating stars, the dynamically accessible perturbations are given by which is the perturbations preserving the mass (see Lemma 2.4). For rotating stars, the dynamically accessible space is different from .
2.4 Reduced functional and the equivalent Stability Criterion
In this section, we prove the formula and complete the proof of Theorem 1.1.
Lemma 2.6
For any , define
| (2.18) |
Then and
3 TPP for slowly rotating stars
In this section, we use the stability criterion in Theorem 1.1 to study two families of slowly rotating stars parameterized by the center density.
3.1 The case of fixed angular velocity
In this subsection, we consider a family of slowly rotating stars with fixed angular velocity.
Under the assumptions (1.2)-(1.3), for some , there exists a family of nonrotating stars with radially symmetric density parametrized by the center density . We refer to [30] and references therein for such results. Let be the support radius of and be the support of . The radial density satisfies
with . For the general equations of state satisfying (1.2)-(1.3) with , it was shown in [15] that .
Let be fixed for some . We construct a family of rotating stars for Euler-Poisson system with the following form
where the dilating function is
and is axi-symmetric and even in .
The existence of rotating stars is reduced to the following equations for :
| (3.1) |
where is a constant and is the support of the density of the rotating star solution.
Theorem 3.1
Let ,
satisfy (1.2)-(1.3), and . Then there exist and solutions of (3.1) for all , satisfying
the following properties:
1) , where .
2) is axi-symmetric
and even in .
3) .
4) has compact support .
5) For all , the mapping is continuous from into .
When , is the nonrotating star solution with .
Now we use Theorem 1.1 to study the stability of above rotating star solutions , for , small enough, and satisfying the Rayleigh condition . First, we check the assumptions in Theorem 1.1. Let be the support radius in for . Since dependents continuously on , it is easy to check the assumptions on for small enough. That is, is and has positive curvature near . Next, we check the assumption (1.7). For nonrotating stars, it is known ([6, 16, 28, 30]) that
For small enough, by the definition of the dilating function , we have
for near .
Below, for rotating stars we use , , , , , , , , etc., to denote the corresponding spaces , , , and operators , , , , etc. defined in Section 2.
By Theorem 1.1, the rotating star is spectrally stable if and only if
| (3.2) |
for all
Moreover, the number of unstable modes equals . The following is an easy corollary of the stability criterion.
Corollary 3.1
(Sufficient condition for instability)
Let be an interval such that the non-rotating star
is unstable for any . Then for any satisfies , there exists
such that the rotating star is unstable for any and .
Proof. The instability of implies that for . Thus there exists some (independent of ) and such that for . Let
then . Noticing that
we have
Thus, there exists such that when
The linear instability of follows.
Let be the first critical point of the mass-radius ratio for the nonrotating stars and set if has no critical point. Consider the rotating stars for and small. We have the following sufficient condition for stability.
Theorem 3.2
For the proof of above Theorem, first we compute . Let and be the axi-symmetric subspaces of and respectively. Define the reduced operator by
Then
defines a bounded bilinear symmetric form on . By the same proof of Lemma 3.7 in [30], we have
Lemma 3.1
It holds that and .
Since the rotating star solution is even in , we can compute and on the even and odd (in ) subspaces respectively. Define
| (3.3) | |||
Lemma 3.2
Assume satisfies (1.2)-(1.3), satisfies . Then for any and small enough, we have and . Moreover, we have the following direct sum decompositions for and
and
satisfying: i)
ii) there exists such that
where is independent of and .
The same decompositions are also true for on and . In addition, for any , it holds that for small enough.
Proof. It was showed in [30] that: for any , we have and in the axi-symmetric function space. Here, is the gravitational potential of the non-rotating star. Since is odd in , it follows that for any : i) on , , ; ii) on , and . Moreover, for , there exists (independent of ) and decompositions and satisfying that: i) ; ii) . Since and
by the perturbation arguments (e.g. Corollary 2.19 in [30]) it follows that for and sufficiently small, the decompositions and satisfy: i) ; ii) .
By the proof of Lemma 3.4 in [30], for any we have
| (3.4) |
where . We note that and . The existence of decompositions for and as stated in the lemma follows readily from (3.4) and above decompositions for and .
Since
and , we have the same decompositions for on and .
Since , it is known that (see [30])
for small. Recall that is the first critical point of . Therefore, when , we have for some constant independent of . Since , we have for any and small enough. This finishes the proof of the lemma.
Proof of Theorem 3.2. The spectral stability of is equivalent to show . By Lemma 3.2 and the fact that on , we have
Since on due to , for spectral stability it suffices to show .
Applying to (3.1), we obtain that
From (3.1) we know that . By Lemma 3.2, for and small enough. Therefore,
i.e. is orthogonal to in .
When , since
we have . Meanwhile, since on , by the same argument as in the proof of Theorem 1.1 in [30], we have . The spectral stability is again true.
It is natural to ask if extrema points of the total mass of the rotating stars are the transition points for stability as in the case of nonrotating stars. Below, we show that this is not true.
First, we give conditions to ensure that the first extrema point of total mass is obtained at a center density before (the first critical point of ). Assume satisfies the following asymptotically polytropic conditions:
H1)
| (3.5) |
for some and ;
H2)
| (3.6) |
for some and .
Under assumptions H1)-H2), it was shown in [15] that the total mass of the non-rotating stars has extrema points. Moreover, the first extrema point of , which is a maximum point denoted by , must be less than (see Lemma 3.14 in [30]). For any , we have in when . Thus when is small enough, the function has the first maximum and . By Theorem 3.2, the rotating stars are stable for . It is shown below that the transition of stability occurs beyond .
Theorem 3.3
Proof. As in the proof of Theorem 3.2, the spectral stability is equivalent to show on . Suppose the maxima point of is the first transition point for stability, then we have
| (3.7) |
By Lemma 3.2, when is small enough, we have the decomposition
satisfying: i) ii) there exists such that
By using above decomposition, it is easy to show that the infimum in (3.7) is obtained by some . Then
On the other hand, we have
and
This implies that for some constant . Since otherwise,
which is in contradiction to . Thus, we have
and consequently
| (3.8) |
Nevertheless, it is not true as shown below.
For non-rotating stars , we have
where and is the gravitational potential. Applying to above equation, one has
When , since we have
and consequently
Since , we have . Thus
Define . Then by Lemma 3.13 in [30], we have
| (3.9) | ||||
Thus by (3.9), we obtain
for and . By (3.36) and (4.78) in [41], we know
for some constant independent of and . Therefore,
for and . By Lemma 2.1, we have
for . This is in contradiction to (3.8) and finishes the proof of the theorem.
3.2 The case of fixed angular momentum distribution
Let be a given function satisfying
| (3.10) |
Define . We construct a family of rotating stars of the following form
where
and is axi-symmetric and even in .
The existence of rotating stars is reduced to the following equations:
| (3.11) |
| (3.12) |
where and is a constant.
Although (3.11) is a little different from the steady state equations in [14] [19], the key linearized operator at the point is the same as [14]. By similar arguments as [14, 19, 41], we can get the following existence theorem.
Theorem 3.4
Let , satisfy (1.2)-(1.3) and satisfy
(3.10). Then there exist and solutions
of (3.11) for all , with the following properties:
1) , where .
2)
is axi-symmetric and even in .
3)
.
4) has
compact support .
5) For all
, the mapping is continuous from into
When , is the nonrotating star solution with .
Now we use Theorem 1.1 to study the stability of rotating star solutions , where is small enough, satisfies (3.10) and the Rayleigh stability condition (i.e. ). As in Section 3.1, the assumptions in Theorem 1.1 can be verified. That is, is and has positive curvature near and (1.7) holds for any and small enough.
Below, for rotating stars we use , , , , , , , , etc., to denote the corresponding spaces , , , and operators , , , , etc. defined in Section 2. Again, we denote to be the first critical point of for non-rotating stars. Define the spaces and as in (3.3). By the same proof of Lemma 3.2, we have the following.
Lemma 3.3
Assume satisfies(1.2)-(1.3) and satisfies (3.10) and . Then for any and small enough, we have and . Moreover, we have the following direct sum decompositions for and
and
satisfying: i)
ii) there exists such that
where is independent of and .
In addition, for any , it holds that for small.
By Theorem 1.1, we get the following necessary and sufficient condition for the stability of rotating stars
for all .
The following Theorem shows that the stability of this family of rotating stars can only change at the mass extrema.
Theorem 3.5
Proof. By the same arguments in the proof of Theorem 3.2, we have
Thus it is reduced to find the number of negative modes of the quadratic form restricted to the even subspace of .
Applying to (3.11), we obtain that
| (3.13) | |||
where
By integration by parts and (3.13), we obtain that
Here, in the above we used
and . The inverse operator
exists and is bounded by Lemma 3.3. Since has compact support and for , we have
Therefore, we have
| (3.14) |
for any .
By (3.14) and the fact that when and is small, we have
On the other hand, we have
By Lemma 3.3, and . We consider two cases:
1) . A combination of above properties immediately yields
Remark 3.1
The above theorem implies that for a family of rotating stars with fixed angular momentum distribution , the transition of stability occurs at the first extrema of the total mass. That is, the turning point principle (TPP) is true for this family of rotating stars. This contrasts greatly to rotating stars of fixed angular velocity, for which case TPP is shown to be not true (see Theorem 3.3).
In the literature, there are three common choices of in the study of rotating stars.
i) (Fixed angular momentum distribution) The most common one is . See for example [2, 18, 31, 32, 33, 34];
ii) (Fixed angular momentum distribution per unit mass) . See for example [35];
iii) (Fixed angular momentum distribution with given total angular momentum) . See for example [4]. We note that for this case, the total angular momentum given by
is a constant depending only on .
In the rest of this subsection, we use Theorem 3.5 to study two examples of rotating stars with mass extrema points.
Example 1. Asymptotically polytropic rotating stars
Assume satisfies assumptions (3.5)-(3.6). By the same arguments as in the case of fixed angular velocity, when is small enough and , the mass of the rotating stars has the the first maximum . Then by Theorem 3.5, the rotating stars are stable when and unstable when goes between and the next extrema point of in .
Example 2. Polytropic rotating stars
Consider the polytropic equation of state . The non-rotating stars (i.e. Lane-Emden stars) with any center density are stable when and are unstable when . In particular, is a monotone function when and there is no transition point of stability.
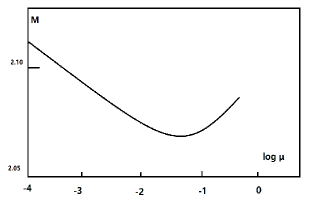
However, polytropic rotating stars with fixed angular momentum distribution can have mass extrema points, which are also the transition points of stability. One such example was given in [4] for and . With numerical help, it was found (see Figure 1 below taken from [4]) that there is a mass minimum point for the total mass . This is the first transition point of stability. In particular, rotating stars with center density beyond become stable.
Remark 3.2
It can also be seen from above Example 2 that the critical index for the onset of instability of rotating polytropic stars is not . Ledoux [25], Chandrasekhar and Lebovitz [8] indicated that the critical index is reduced from to for small uniform rotating stars, where is the moment of inertia about the center of mass and is the gravitational potential energy. For more discussion about the critical index of rotating stars, see [13, 22, 38, 39].
4 Instability for Rayleigh Unstable case
Consider an axi-symmetric rotating star , where the angular velocity satisfies the Rayleigh instability condition, that is, there exists a point such that
| (4.1) |
For incompressible Euler equation, it is a classical result by Rayleigh in 1880 [37] that condition (4.1) implies linear instability of the rotating flow under axi-symmetric perturbations. In this section, we will show the axi-symmetric instability of rotating stars with Rayleigh unstable angular velocity.
From the linearized Euler-Poisson system (2.5), we get the following second order equation for ,
| (4.2) |
where are operators on defined by
and
Lemma 4.1
is a self-adjoint operator on with the equivalent inner product .
Proof. By Lemma 2.9 in [30], is self-adjoint on with the equivalent inner product . Since is a symmetric bounded operator on is self-adjoint by Kato-Rellich Theorem.
The next lemma on the quadratic form of will be used later.
Lemma 4.2
There exists constants such that for any , we have
Proof. Since
and obviously , it suffices to estimate
where . By integration by parts,
which implies that . This finishes the proof of the lemma.
The study of equation (4.2) is reduced to understand the spectra of the self-adjoint operator . First, we give a Helmholtz type decomposition of vector fields in .
Lemma 4.3
There is a direct sum decomposition , where is the closure of
in and is the closure of
in .
The proof of above lemma is similar to that of Lemma 3.15 in [30] and we skip. Denote and to be the projection operators. Then .
For any , let where and . Since
the operator is equivalent to the following matrix operator on
where
and
Lemma 4.4
The operator is -compact.
Proof. For any , the graph norm is defined by
It is obvious that . To prove is -compact, we need to prove is compact. By the definition of , we notice that . For ,
as defined in (1.16). By the proof of Lemma 4.2 we have
Thus . Since the embedding is compact by Proposition 12 in [20] and are bounded operators, it follows that is compact.
The above lemma implies that the essential spectra of is the same as .
Lemma 4.5
.
Proof. We have by the definition of the operator . By Lemma 4.4 and Weyl’s Theorem, we have By Theorem 2.3 v) in [30] and the compact embedding of , the spectra of on are purely discrete and . By the same arguments as in the proof of Lemma 4.4, is relative compact to and as a result Since the matrix operator is upper triangular, it follows that
We study the essential spectra of in the next two lemmas. By the Rayleigh instability condition (4.1) and the fact that , we know that for some , .
Lemma 4.6
.
Proof. For any , let be such that . Choose and small enough, such that when and . Choose a sequence with . Let , be two smooth cutoff functions such that . Define with
and
where
Then and owing to
We will show that is a Weyl’s sequence for the operator and therefore .
First, we check that converge to weakly in . For any , since is supported in , we have
when .
Next, we prove that converge to strongly in . We write
Noticing that , and
we have
when . This shows that is a Weyl’s sequence for and . Thus which implies since is closed.
Lemma 4.7
.
Proof. Fix . For any , we have
Since , we have
where . Thus , which implies that is bounded and . Therefore, . This prove the lemma by combining with Lemma 4.6.
The following proposition gives a complete characterization of the spectra of .
Proposition 4.1
Under the Rayleigh instability condition
(4.1), it holds:
i) .
ii)
consists of at most finitely many
negative eigenvalues of finite multiplicity.
iii) consists of a sequence of positive
eigenvalues tending to infinity.
Proof. The conclusion in i) follows from Lemmas 4.5 and 4.7. This implies that any in or must be a discrete eigenvalue of finite multiplicity.
Proof of ii): Suppose otherwise. Then there exists an infinite dimensional eigenspace for negative eigenvalues in . We notice that
since is nonnegative. It follows that since . This is in contradiction to that .
Proof of iii): Suppose otherwise. Then there exists an upper bound of , denoted by . Thus which implies that
Consequently the eigenvalues of cannot exceed . This is in contradiction to the fact that has a sequence of positive eigenvalues tending to infinity.
Now we can prove Theorem 1.2.
Proof of Theorem 1.2. Denote to be the spectral family of the self-adjoint operator . Let be the eigenvalues of in . If , we denote the eigenvalues in by where . For , let and be the projections to and respectively, and be the projection to . By Proposition 4.1, we have
For any initial data , the solution to the second order equation (4.2) can be written as
| (4.3) | ||||
If , the solution is obtained by removing the second term above.
Denote the minimum of by , that is,
By the formula (4.3), it is easy to see that for . To estimate , we note that by Lemma 4.2
| (4.4) |
By using (4.3), we have
This implies
by using (4.4) and the estimate for . Since
by similar estimates as above for we obtain
This finishes the proof of the upper bound estimate (1.17). It is straightforward to show that the energy defined in (1.18) is conserved for solutions of (4.2).
Next, we prove the lower bound estimate (1.19) in two cases.
Case 1: . We choose and where is the eigenfunction of corresponding to the smallest eigenvalue in . Then
which clearly implies .
Case 2: . Since , for any small there exists a nonzero function . Choose the initial data and . Then the solution for the equation (4.2) is given by
Thus
This finishes the proof of the theorem.
Remark 4.1
By Theorem 1.2, the maximal growth rate of unstable rotating stars can be due to either discrete or continuous spectrum. Consider a family of slowly rotating stars near a non-rotating star with satisfying the Rayleigh instability condition (4.1). If the non-rotating star is linearly stable, then for sufficiently small , the linear instability of is due to the continuous spectrum. On the other hand, if the the non-rotating star is linearly unstable, then for sufficiently small , remains unstable and the maximal growth rate is due to the discrete eigenvalue perturbed from the unstable eigenvalue of the non-rotating star.
Remark 4.2
In [24], Lebovitz indicated that for slowly rotating stars with any angular velocity profile , discrete unstable modes cannot be perturbed from neutral modes of non-rotating stars. More precisely, Lebovitz showed the stabilizing influence of rotation on the fundamental mode (corresponding to the first eigenvalue of the operator in (4.2)) even when does not satisfy the Rayleigh stability condition. However, this does not imply the stability of the rotating stars since the unstable continuous spectrum was not considered in [24].
Acknowledgments: This work is supported partly by the NSF grants DMS-1715201 and DMS-2007457 (Lin) and the China Scholarship Council No.201806310066(Wang).
References
- [1] G. Auchmuty. The global branching of rotating stars. Arch. Rat. Mech. Anal. 114:179–194, 1991.
- [2] G. Auchmuty and R. Beals. Variational solutions of some nonlinear free boundary problems. Arch. Rat. Mech. Anal. 43:255–271, 1971.
- [3] A. Balinsky, W. Evans and R. Lewis. The Analysis and Geometry of Hardy’s Inequality. Physical Review D Particles Fields. 81(8):1014–1025, 2015.
- [4] S. I. Bisnovaty-Kogan, G. S. Blinnikov. Static criteria for stability of arbitrarily rotating stars. Astronomy Astrophysics. 31(4), 1974.
- [5] A. Caffarelli, L. Friedman. The shape of axi-symmetric rotating fluid. Journal of Functional Analysis. 694:109–142, 1980.
- [6] S. Chandrasekhar. Introduction to the Stellar Structure. University of Chicago Press, 1939.
- [7] S. Chandrasekhar. Ellipsoidal Figures of Equilibrium. Yale University Press, 1969.
- [8] S. Chandrasekhar and N. R. Lebovitz. The Pulsations and the Dynamical Stability of Gaseous Masses in Uniform Rotation. Astrophysical Journal. 152(1):267–291, 1968.
- [9] S. Chanillo and Y. Li. On diameters of uniformly rotating stars. Communications in Mathematical Physics. 166(2):417–430, 1994.
- [10] A. Friedman and B. Turkington. Asymptotic estimates for an axisymmetric rotating fluid. Journal of Functional Analysis. 37(2):136–163, 1980.
- [11] A. Friedman and B. Turkington. Existence and dimensions of a rotating white dwarf. Journal of Differential Equations. 42(3):414–437, 1981.
- [12] J. Friedman, J. Ipser, and R. Sorkin. Turning-Point method for axisymmetric stability of rotating relativistic stars. Astrophysical Journal. 325:722–724, 1988.
- [13] J. Hazelhurst. The stabilizing effect of rotation. Astronomy and Astrophysics. 219:181–184, 1994.
- [14] U. Heilig. On Lichtenstein’s analysis of rotating Newtonian stars. In Annales de l’IHP Physique théorique. 60:457–487, 1994.
- [15] J. M. Heinzle. and C. Uggla. Newtonian stellar models. Ann. Physics. 308:18–61, 2003.
- [16] J. Jang. Nonlinear Instability Theory of Lane-Emden stars. Comm. Pure Appl. Math. 67:1418–1465, 2014.
- [17] J. Jang and T. Makino. On slowly rotating axisymmetric solutions of the Euler-Poisson equations. Arch. Ration. Mech. Anal. 225:873–900, 2017.
- [18] J. Jang and T. Makino. On rotating axisymmetric solutions of the Euler-Poisson equations. Journal of Differential equations. 266(7):3942–3972, 2019.
- [19] J. Jang and T. Makino. On rotating axisymmetric solutions of the Euler-Poisson equations. Journal of Differential equations. 266:3942–3972, 2019.
- [20] J. Jang and T. Makino. Linearized Analysis of Barotropic Perturbations around Spherically Symmetric Gaseous Stars Governed by the Euler-Poisson Equations. Journal of Mathematical Physics. 61(5):051508,42, 2020.
- [21] W. S. Jardetzky. Theories of figures of celestial bodies. Interscience Publishers, 1958.
- [22] H. Kähler. Rotational effects on stellar structure and stability. Astronomy and Astrophysics. 288:191–203, 1994.
- [23] T. Kato. Perturbation theory for linear operators. Reprint of the 1980 edition. Springer-Verlag, Berlin, 1995.
- [24] N. R. Lebovitz. The Effect of an Arbitrary Law of Slow Rotation on the Oscillations and the Stability of Gaseous Masses. The Astrophysical Journal. 160:701, 1970.
- [25] P. Ledoux. On the Radial Pulsation of Gaseous Stars. The Astrophysical Journal. 102(2):143, 1945.
- [26] Y. Li. On uniformly rotating stars. Arch. Rat. Mech. Anal. 115:367–393, 1991.
- [27] L. Lichtenstein. Untersuchungen über die Gleichgewichtsfiguren rotierender Flüssigkeiten, deren Teilchen einander nach dem Newtonschen Gesetze anziehen. Math. Z. 36:481–562, 1933.
- [28] S.S. Lin. Stability of gaseous stars in spherically symmetric motions. SIAM J. Math. Anal. 28(3):539–569, 1997.
- [29] Z. Lin and C. Zeng. Instability, index theorem, and exponential trichotomy for Linear Hamiltonian PDEs. Mem. Amer. Math. Soc. 275 (1347), 2022.
- [30] Z. Lin and C. Zeng. Separable Hamiltonian PDEs and Turning point principle for stability of gaseous stars. Comm. Pure. Appl. Math., accepted 2022.
- [31] T. Luo and J. Smoller. Rotating fluids with self-gravitation in bounded domains. Arch. Rat. Mech. Anal. 173(3):345–377, 2004.
- [32] T. Luo and J. Smoller. Nonlinear Dynamical Stability of Newtonian Rotating and Non-rotating White Dwarfs and Rotating Supermassive Stars. Communications in Mathematical Physics. 284(2):425–457, 2008.
- [33] T. Luo and J. Smoller. Existence and non-linear stability of rotating star solutions of the compressible Euler-Poisson equations. Arch. Ration. Mech. Anal. 191(3):447–496, 2009.
- [34] T. Luo and J. Smoller. On the Euler-Poisson equations of self-gravitating compressible fluids.Nonlinear conservation laws and applications, volume 153. Springer, New York, 2011.
- [35] J. P. Ostriker and W. K. Mark. Rapidly rotating stars. I. The self-consistent-field method. The Astrophysical Journal. 1968, 151:1075–1088.
- [36] J. E. Pringle and A. R. King. Astrophysical Flows. Cambridge university press, 2003.
- [37] L. Rayleigh. On the stability, or instability, of certain fluid motions. Proc. London Math. Soc. 11:57–70, 1880.
- [38] K. A. Sidorov. Influence of rotation and a binary companion on the frequency of the radial pulsations of a homogeneous star. Astrophysics. 18(1):90–96, 1982.
- [39] K. A. Sidorov. Structure and oscillations of rotating polytropes. Astrophysics. 17(4):427–436, 1982.
- [40] S. W. Stahler. The Equilibria of Rotating Isothermal Clouds - Part Two - Structure and Dynamical Stability. Astrophysical Journal. 268:165–184, 1983.
- [41] W. A. Strauss and Y. Wu. Steady States of Rotating Stars and Galaxies. SIAM Journal on Mathematical Analysis. 49(6):4865–4914, 2017.
- [42] W. A Strauss and Y. Wu. Rapidly Rotating Stars. Communications in Mathematical Physics. 368(2):701–721, 2019.
- [43] W. A Strauss and Y. Wu. Rapidly rotating white dwarfs. Nonlinearity. 33(9):4783–4798, 2020.
- [44] K. Takami, L. Rezzolla, and S. Yoshida. A quasi-radial stability criterion for rotating relativistic stars. Monthly Notices of the Royal Astronomical Society Letters. 416(1):L1–L5, 2011.
- [45] J. L. Tassoul. Theory of Rotating Stars. Princeton University Press, 1978.
- [46] J. L. Tassoul. Stellar rotation. Cambridge university press, 2000.