Sub-Finsler geometry and nonholonomic mechanics
Abstract.
We discuss a variational approach to the length functional and its relation to sub-Hamiltonian equations on sub-Finsler manifolds. Then, we introduce the notion of the nonholonomic sub-Finslerian structure and prove that the distributions are geodesically invariant concerning the Barthel non-linear connection. We provide necessary and sufficient conditions for the existence of the curves that are abnormal extremals; likewise, we provide necessary and sufficient conditions for normal extremals to be the motion of a free nonholonomic mechanical system, and vice versa. Moreover, we show that a coordinate-free approach for a free particle is a comparison between the solutions of the nonholonomic mechanical problem and the solutions of the Vakonomic dynamical problem for the nonholonomic sub-Finslerian structure. In addition, we provide an example of the nonholonomic sub-Finslerian structure. Finally, we show that the sub-Laplacian measures the curvature of the nonholonomic sub-Finslerian structure.
Key words and phrases:
Sub-Finsler geometry, Sub-Hamiltonian vector field, Sub-Hamiltonian equations, Non-linear connection, Nonholonomic Free Particle, Sub-Laplacian2020 Mathematics Subject Classification:
53C05, 53C60, 70F25, 53C171. Introduction
Sub-Finsler geometry and nonholonomic mechanics have attracted much attention recently; they are rich subjects with many applications.
Sub-Finsler geometry is a natural generalization of sub-Riemannian geometry. The sub-Riemannian metric was initially referred to as the Carnot-Carathéodory metric. J. Mitchell, [23], investigated the Carnot-Carathéodory distance between two points by considering a smooth Riemannian -manifold equipped with a -rank distribution of the tangent bundle . A decade later, M. Gromov [17] provided a comprehensive study of the above concepts. V. N. Berestovskii [9] identified the Carnot-Caratheodory Finsler metric version as the Finsler counterpart of this metric, now commonly known as the sub-Finsler metric. In this study, our definition of the sub-Finsler metric closely aligns with the definition presented in previous works [3, 14]. The motivation behind studying sub-Finsler geometry lies in its pervasive presence within various branches of pure mathematics, particularly in differential geometry and applied fields like geometric mechanics, control theory, and robotics. We refer the readers to [1, 4, 8, 20].
Nonholonomic mechanics is currently a very active area of the so-called geometric mechanics [21]. Constraints on mechanical systems are typically classified into two categories: integrable and nonintegrable constraints. Nonholonomic mechanics: constraints that are not holonomic; these might be constraints that are expressed in terms of the velocity of the coordinates that cannot be derived from the constraints of the coordinates (thereby nonintegrable) or the constraints that are not given as an equation at all [19]. Nonholonomic control systems exhibit unique characteristics, allowing control of underactuated systems due to constraint nonintegrability. These problems arise in physical contexts like wheel systems, cars, robotics, and manipulations, with more insights found in [10, 21].
In [18], B. Langerock considered a general notion of connections over a vector bundle map and applied it to the study of mechanical systems with linear nonholonomic constraints and a Lagrangian of kinetic energy type. A. D. Lewis in [19], investigated various consequences of a natural restriction of a given affine connection to distribution. The basic construction comes from the dynamics of a class of mechanical systems with nonholonomic constraints. In a previous paper in collaboration with L. Kozma [3], constructed a generalized non-linear connection for a sub-Finslerian manifold, called -connection by the Legendre transformation which characterizes normal extremals of a sub-Finsler structure as geodesics of this connection. In this paper, [3] and [4] play an important role in calculating our main results. These results are divided into two parts: sub-Hamiltonian systems and nonholonomic sub-Finslerian structures on the nonintegrable distributions.
The paper is organized according to the following: In Section 2, we review some standard facts about sub-Finslerian settings. In Section 3, we define a sub-Finsler metric on by using a sub-Hamiltonian function and show the correspondence between the solutions of sub-Hamiltonian equations and the solution of a variational problem. Section 4 introduces the notion of nonholonomic sub-Finslerian structures and presents the main results, including conditions for the motion of a free mechanical system under linear nonholonomic constraints to be normal extremal with respect to the linked sub-Finslerian structure. Section 5 provides an example of the nonholonomic sub-Finslerian structure, and Section 6 discusses the curvature of the sub-Finslerian structure. We conclude that if the sub-Laplacian is zero, then the sub-Finslerian structure is flat and locally isometric to a Riemannian manifold, while if is nonzero, the sub-Finslerian structure is curved and the shortest paths between two points on the manifold are not necessarily straight lines.
2. Preliminaries
Let be an -dimensional smooth () manifold, and let represent its tangent space at a point . We denote the module of vector fields over by , and the module of -forms by .
Consider , a regular distribution on , defined as a subbundle of the tangent bundle with a constant rank of . Locally, in coordinates, this distribution can be expressed as , where are linearly independent vector fields.
A non-negative function is called a sub-Finsler metric if it satisfies the following conditions:
-
1.
Smoothness: is a smooth function over ;
-
2.
Positive Homogeneity: for all and ;
-
3.
Positive Definiteness: The Hessian matrix of is positive definite at every .
A differential manifold equipped with a sub-Finsler metric is recognized as a sub-Finsler manifold, denoted by .
An absolutely continuous curve, denoted as , is considered horizontal if its tangent vector field lies within for all , whenever it is defined. This condition reflects the nonholonomic constraints imposed on the curve.
The length functional of such a horizontal curve possesses a derivative for almost all , with the components of the derivative, , representing measurable curves. The length of is usually defined as:
This length structure gives rise to a distance function, denoted as , defined by:
and the infimum is taken over all horizontal curves connecting to . This distance metric captures the minimal length among all possible horizontal paths between two points on the manifold .
A geodesic, also known as a minimizing geodesic, refers to a horizontal curve that realizes the distance between two points, i.e., .
Throughout this paper, it is consistently assumed that is bracket-generating. A distribution , is characterized as bracket-generating if every local frame of , along with all successive Lie brackets involving these frames, collectively span the entire tangent bundle . If represents a bracket-generating distribution on a connected manifold , it follows that any two points within can be joined by a horizontal curve. This foundational concept was initially established by C. Carathéodory [12] and later reaffirmed by W. L. Chow [13] and P. K. Rashevskii [25]. However, for a comprehensive explanation of the bracket-generating concept, one can turn to R. Montgomery’s book, [24].
3. Sub-Hamiltonian associated with sub-Finslerian manifolds
3.1. The Legendre transformation and Finsler dual of sub-Finsler metrics
Let be a rank- codistribution on a smooth manifold , assigning to each point a linear subspace . This codistribution is a smooth subbundle, and spanned locally by pointwise linearly independent smooth differential 1-forms:
We define the annihilator of a distribution on as , a subbundle of consisting of covectors that vanish on :
such that . Similarly, we define the annihilator of the orthogonal complement of , denoted by , as the subbundle of consisting of covectors that vanish on .
Using these notions, we can define a sub-Finslerian function denoted by , where is a positive function. This function shares similar properties with , but is based on instead of .
In our previous work [4], we established the relationship:
| (1) |
such that is the Legendre transformation of the sub-Lagrangian function , a diffeomorphism between and .
In this context, to express in terms of , we consider the Legendre transformation of with respect to the sub-Lagrangian function , where is the square of the Finsler norm of . The Legendre transformation maps to .
Utilizing the definition of the Legendre transformation, we observe that
where denotes the differential of with respect to its first argument evaluated at . Note that is a linear function on .
Given a covector , with the base point of , we can express the dual sub-Finsler metric in terms of as
where represents the dual pairing between the covector and the vector .
3.2. The Sub-Hamiltonian Function and Sub-Hamilton’s Equations for Sub-Finsler Manifolds
The sub-Hamiltonian function associated with a sub-Finsler metric given by
Here, denotes the dual metric to , defined by
| (2) |
where represents a momentum vector in associated with the point in the manifold , and denotes the inner product induced by a Riemannian metric . The sub-Finslerian metric defined by (2) is known as the Legendre transform of , i.e., satisfying the relationship in (1). It is worth noting that the sub-Hamiltonian function associated with a Finsler metric is not unique, and different choices of Hamiltonians may lead to different dynamics for the associated geodesics.
The sub-Hamiltonian formalism is a method of constructing a sub-Finsler metric on a subbundle by defining a sub-Hamiltonian function on the subbundle , where denotes a point in and denotes a momentum vector in , as explained in the following remark:
Remark 1.
The sub-Finsler vector bundle, introduced in [4] and expanded upon in [5], plays a pivotal role in formulating sub-Hamiltonians in sub-Finsler geometry. Consider the covector subbundle with projection , forming a rank- subbundle in the cotangent bundle of . The pullback bundle is obtained by pulling back through itself and is denoted as the sub-Finsler bundle over . This bundle allows the introduction of orthonormal covector fields with respect to the induced Riemannian metric . The sub-Hamiltonian induces a metric on the sub-Finsler bundle. In terms of this metric, the sub-Hamiltonian function can be expressed as a function of components . Specifically, , where is the inverse of the metric tensor for the extended Finsler metric on , kindly check Remark 2. This defines a sub-Finsler metric on a subbundle of that is determined by a distribution on .
Now fixing a point , for any covector , there exists a unique sub-Hamiltonian vector field on , denoted by , described by
| (3) |
where the partial derivatives are taken with respect to the local coordinates on .
Definition 1.
The sub-Hamiltonian equations on are then given by
| (4a) | ||||
| (4b) | ||||
These equations express the fact that the sub-Hamiltonian vector field preserves the sub-Finsler metric on . If the Hamiltonian is independent of the cotangent variables , then the second equation above reduces to the Hamilton-Jacobi equation for the sub-Finsler manifold .
Remark 2.
We extended sub-Finsler metrics to full Finsler metrics using an orthogonal complement subbundle in [3]. However, here are more details and evidence.
Given a subbundle of the tangent bundle , its direct complement is a subbundle of such that , and at every point , and .
One canonical way to obtain a direct complement to is to use the notion of an orthogonal complement. Given a subbundle of , we define the orthogonal complement bundle as follows:
such that are orthogonal with respect to the inner product induced by the Riemannian metric. It can be shown that is a subbundle of and satisfies the conditions for being a direct complement to . Moreover, it can be shown that any two direct complements to are isomorphic bundles, so the orthogonal complement is unique up to bundle isomorphism.
Note that if is equipped with a sub-Finsler metric, then the metric induces a non-degenerate inner product on , so we can use this inner product to define the orthogonal complement. However, if is not equipped with a Riemannian metric, then the notion of an orthogonal complement may not be well-defined. So, to extend a given sub-Finsler metric on a subbundle of to a full Finsler metric on , one can use an orthogonal complement subbundle . This is a regular subbundle of that is orthogonal to with respect to the Riemannian metric . Locally, can be written as:
| (5) |
where is the rank of the subbundle and are local vector fields that form a basis for . Then, one can define a Finsler metric on by:
| (6) |
where is the projection onto , is the projection onto , and is a Finsler metric on . This construction yields a full Finsler metric on that extends the sub-Finsler metric on . Note that the Finsler metric on is not unique, so the choice of is arbitrary. However, the resulting Finsler metric on is unique and independent of the choice of .
To see this, suppose we have two choices of Finsler metrics and on . Let and be the corresponding extensions of to using Equation 6. Then for any , we have
Subtracting these two equations, we obtain
Since can be decomposed uniquely as with and , we have , and the right-hand side of the above equation depends only on . Since the choice of on is arbitrary, we can choose and to be equal except on a single vector , in which case will be nonzero only for that vector. Therefore, we have only for that vector, and hence .
Therefore, we have shown that the resulting Finsler metric on is unique and independent of the choice of .
Let us turn to define the normal and abnormal extremals:
The projection to is called a normal extremal. One can see that every sufficiently short subarc of the normal extremal is a minimizer sub-Finslerian geodesic. This subarc is the unique minimizer joining its endpoints (see [4, 7]). In the sub-Finslerian manifold, not all the sub-Finslerian geodesics are normal (contrary to the Finsler manifold). This is because the sub-Finslerian geodesics, which admit a minimizing geodesic, might not solve the sub-Hamiltonian equations. Those minimizers that are not normal extremals are called singular or abnormal extremals, (see for instance [24]). Even in the sub-Finslerian case, Pontryagin’s maximum principle implies that every minimizer of the arc length of the horizontal curves is a normal or abnormal extremal.
3.3. Non-Linear Connections on a sub-Finsler manifolds
Definition 2.
An -connection on a sub-Finsler manifold is a generalized non-linear connection over the induced mapping
| (7) |
constructed by Legendre transformation by (7), where is the adjoint mapping of , i.e. for any is determined by
such that for all . For more details about the settings of the - connection , we refer the reader to [3]. Obviously, is a bundle mapping whose image set is precisely the subbundle of and whose kernel is the annihilator of .
Moreover, we recall the Barthel non-linear connection of the cotangent bundle as follows
where the Berwald connection on the tangent bundle was locally given by
| (8) |
The Barthel nonlinear connection plays the same role in the positivity homogeneous case as the Levi-Civita connection in Riemannian geometry, see [22].
Definition 3.
A curve is said to be -admissible if such that is the natural cotangent bundle projection. An auto-parallel curve is the -admissible curve with respect to -connection if it satisfies for all . The geodesic of is just the base curve of the auto-parallel curve.
In coordinates, an auto-parallel curve satisfies the equations
such that and are the local components of the contravariant tensor field of associated with the sub-Hamiltonian structure and the connection coefficients of , respectively. In fact, given a non-linear -connection we can always introduce a smooth vector field on , in addition, their integral curves are auto-parallel curves in relation to . In canonical coordinates, this vector field given by
In [3], we proved that every geodesic of is a normal extremal, and vice versa. More precisely, we have shown that the coordinate expression for the sub-Hamiltonian vector field (this is another form of (3)) equals:
Comparing the latter formula with the definition of , yields that .
3.4. Variational approach to the length functional and its relation to sub-Hamiltonian equations on sub-Finsler manifolds
We can consider a small variation of the curve such that and are fixed at and , respectively, and for all . We can think of as a one-parameter family of curves in the set of all curves joining and , and we can consider the variation vector field , which is tangent to the curve .
Then, we can define the directional derivative of the length functional along the variation vector field as
| (9) |
Note that is the length of the curve , which starts at and ends at . Therefore, is the rate of change of the length of the curve as we vary it along the vector field .
By chain rule, we can write
where is the gradient of the length functional. Using the fact that is a variation of and , we can express in terms of the variation vector field as
Therefore, we obtain
which gives the desired equation (9).
Let us clarify the correct relationship between the sub-Hamiltonian equations and the length functional.
Given a sub-Finsler manifold , the sub-Hamiltonian equations on are given by
| (10) |
where is a horizontal curve in with and .
On the other hand, the length functional on is defined as
where is a horizontal curve in with and .
It will be shown (see Proposition 6) that a curve is a solution to the sub-Hamiltonian equations if and only if it is a critical point of the length functional . In other words, if satisfies the sub-Hamiltonian equations, then , and conversely, if is a critical point of , then it satisfies the sub-Hamiltonian equations.
Proposition 1.
A horizontal curve joining with in is a solution to the sub-Hamiltonian equations if and only if it is a critical point of the length functional . That is, if and only if .
Proof.
We will begin by proving the first direction:
Assume that satisfies the sub-Hamiltonian equations. Then, we have
for all and . Note that is the conjugate momentum of , and we can write the sub-Finsler Lagrangian as
where is the sub-Finsler metric tensor. Then, the length functional can be written as
Using the Euler-Lagrange equation for the Lagrangian , we have
for all and . Since depends only on and not on explicitly, we can write this as
for all and . Using the chain rule and the fact that is horizontal curve, we can write this as
for all and . This is exactly the condition for to be a critical point of , i.e., .
Now, let us proceed to prove the second direction:
Assume that is a critical point of , i.e., . Then, for any smooth variation with , we have
where is the variation of the coordinates induced by . Note that we have used the fact that to get rid of boundary terms.
Since is arbitrary, this implies that
for all and . Using the sub-Hamiltonian equations, we can write this as
for all and . This implies that is constant along . Since is horizontal curve, we can choose a partition such that is smooth on each subinterval . Let be the constant value of on .
Then, for each , we have
for all and . This implies that
for all and . Since is the conjugate momentum of , this implies that satisfies the sub-Hamiltonian equations on each subinterval .
Therefore, satisfies the sub-Hamiltonian equations on the whole interval , which completes the proof of second direction. ∎
Corollary 1.
If is a horizontal curve that minimizes the length functional between two points and on a sub-Finsler manifold , then is a smooth geodesic between and . Conversely, if is a smooth geodesic between and , then its length is locally minimized.
Proof.
The proof of this corollary follows directly from Proposition 1. ∎
The Proposition 1 establish the significance of the results in the context of sub-Hamiltonian equations and curve optimization on a sub-Finsler manifold. The corollary highlights the connection between curve optimization, geodesics, and the length functional on sub-Finsler manifolds. Collectively, these results provide deep insights into the geometric behavior of curves on sub-Finsler manifolds, linking the sub-Hamiltonian equations, length minimization, and the concept of geodesics in this context.
4. Nonholonomic sub-Finslerian structure
A sub-Finslerian structure is a generalization of a Finslerian structure, where the metric on the tangent space at each point is only required to be positive-definite on a certain subbundle of tangent vectors.
A nonholonomic sub-Finslerian structure is a triple where is a smooth manifold of dimension , is a non-integrable distribution of rank on , which means that it cannot be generated by taking the Lie bracket of vector fields. This property leads to the nonholonomicity of the structure and has important implications for the geometry and dynamics of the system. The regularity condition on means that it can be locally generated by smooth vector fields, and the nonholonomic condition means that it cannot be integrable to a smooth submanifold of . The sub-Finslerian metric is a positive-definite inner product on the tangent space of at each point of . It is often expressed as a norm that satisfies the triangle inequality but does not necessarily have the homogeneity property of a norm. The metric induces a distance function on , known as the sub-Riemannian distance or Carnot-Carathéodory distance, which is a natural generalization of the Riemannian distance. Mechanically, sub-Riemannian manifolds and their generalization, sub-Finslerian manifolds are classified as configuration spaces [6].
Nonholonomic sub-Finslerian structures arise in the study of control theory and robotics, where they model the motion of nonholonomic systems, i.e., systems that cannot achieve arbitrary infinitesimal motions despite being subject to arbitrary small forces. The motivation for this generalization comes from the need to provide a framework that captures the complexities of motion in such systems beyond what sub-Riemannian geometry alone can achieve. The study of these structures involves geometric methods, such as the theory of connections and curvature, and leads to interesting mathematical problems. This generalization not only extends the applicability of the theory to a wider class of problems but also paves the way for new insights into the geometric mechanics of nonholonomic systems.
4.1. Nonholonomic Free Particle Motion under a Non-Linear Connection and Projection Operators
We have the projection operator that projects any covector onto its horizontal component with respect to the non-linear connection induced by the distribution . More precisely, for any , we define to be the projection of onto , and then .
Next, we have the complement projection , which projects any covector onto its vertical component with respect to the non-linear connection induced by the distribution . More precisely, for any , we define to be the projection of onto , and then .
Now, we consider a nonholonomic free particle moving along a horizontal curve . Let be a Barthel non-linear connection, (see [3, 18]), and the condition expresses the fact that the velocity vector is constrained to be horizontal, while the constraint condition expresses the fact that the velocity vector lies in the distribution .
Using the fact that can be decomposed into its horizontal and vertical components with respect to the non-linear connection induced by the distribution , we can express any covector as . Then, the constraint condition can be written as .
Using the above decomposition of , we can rewrite the condition as , where we have used the fact that is the derivative of the horizontal component of with respect to time, and hence is zero if is constrained to be horizontal.
Therefore, the conditions and together express the fact that the velocity vector of the nonholonomic free particle is constrained to be horizontal and lie in the distribution , respectively.
Since is identified with via a Riemannian metric , we have a natural isomorphism between and given by the orthogonal projection. In particular, we have a direct sum decomposition of the cotangent bundle as
Note that any covector can be uniquely decomposed as .
We can define a new non-linear connection on according to
| (11) |
for all and . We restrict this connection to and the equations of motion of the nonholonomic free particle can be re-written as , together with the initial velocity taken in (see [18, 19]).
Given a nonholonomic sub-Finsler structure one can always construct a normal and -adapted -connection [3, Proposition 16]. Furthermore, we can construct a generalized non-linear connection over the vector bundle , we will set with . So, attached to there is a non-linear connection called the nonholonomic connection over the adjoint mapping on natural projection given by
Moreover, there is no doubt this indeed determines a non-linear connection, namely,
such that is the non-linear connection given in (11), for all and . In the nonholonomic setting, the horizontal curves are in that are extensions of curves in , i.e. for some curve in .
Definition 4.
Let be a nonholonomic sub-Finsler structure. A nonholonomic bracket
is defined as for all , , and . This Lie bracket satisfies all the regular properties of the Lie bracket with the exception of the Jacobi identity. It may happen that the nonholonomic bracket because is nonintegrable.
Now, we can formally define the torsion operator
In this setting, due to the symmetry of the non-linear connection , the torsion for all and . Moreover, [4, Lemma 5], implies that the non-linear connection preserves the sub-Finsler metric on , i.e. for all . Therefore, there exists a unique conservative homogeneous nonlinear connection with zero torsion and we can write the equations of motion for the given nonholonomic problem as , in such a way that is a curve in tangent to .
There is a close relationship between nonholonomic constraints and the controllability of non-linear systems. More precisely, there is a beautiful link between optimal control of nonholonomic systems and sub-Finsler geometry. In the case of a large class of physically interesting systems, the optimal control problem is reduced to finding geodesics with respect to the sub-Finslerian metric. The geometry of such geodesic flows is exceptionally rich and provides guidance for the design of control laws, for more information see Montgomery [24]. We have seen in Section 2 that for each point , we have the following distribution of rank
such that for any control function the control system is defined as
is called a nonholonomic control system or driftless control system in the quantum mechanical sense, see [6].
4.2. Results
The subsequent findings enhance comprehension of nonholonomic sub-Finslerian structures and their relevance in geometric mechanics. These insights offer essential tools for addressing and resolving issues concerning restricted movement within mathematical and physical domains. Specifically, these results shed light on the behavior of nonholonomic structures and their utility in analyzing constrained motion, particularly within the realm of geometric mechanics.
Remark 3.
We call the distribution a geodesically invariant if for every geodesic of , implies that for every .
One can prove that if is a sub-Finslerian manifold such that for any , is a vector subspace of . The distribution is geodesically invariant if and only if, for any and any , the Jacobi field along any geodesic with initial conditions and is also in .
In other words, if the Jacobi fields along any geodesic with initial conditions in remain in , then is geodesically invariant. Conversely, if is geodesically invariant, then any Jacobi field along a geodesic with initial conditions in must also remain in . We leave the proof of this statement for future work.
The following Proposition implies, in particular, that is geodesically invariant with respect to Barthel’s non-linear connection .
Proposition 2.
-
(I)
For each and , .
-
(II)
For each and , .
-
(III)
For each and , .
Proof.
-
(I)
Let and . Then, by the definition of the pullback connection, given in (11), and the Leibniz rule, we have
Since and both lie in , it follows that also lies in .
-
(II)
Using the definition of the connection , we have:
Now, let us analyze each term on the right-hand side individually:
First, consider . Since is a section of and is a vector field on , is a section of .
Next, we have . Here, is a bundle map from to , so is a section of . The negative sign in front ensures that the result remains in .
Finally, we consider . Since is a bundle map from to the orthogonal complement of , is a section of . However, we need it to be a section of .
To ensure that lies in , we can use the projection operator to project it back onto . This projection ensures that the final result remains within .
Combining these results, we see that is a section of , as desired.
-
(III)
Using the definition of the connection , we have
where in the last step we used the fact that
which follows from the definition of the codifferential operator and the fact that .
Now we need to show that the three terms on the right-hand side of this expression lie in . We will do this term by term. First, note that since maps to itself and .
Next, we need to show that . Note that
so it suffices to show that . To see this, note that since and are both sections of , and that maps to itself.
Finally, we need to show that . To see this, note that is a tensor of type that maps vectors tangent to to vectors tangent to , so is a section of . Moreover, maps to itself since maps to itself and maps to itself.
Therefore, we have shown that , which implies that is a harmonic one-form with respect to the induced metric on .
To summarize, we showed that if is a closed one-form on such that , then is a harmonic one-form with respect to the induced metric on .
∎
In the following, we shall present the nonholonomic sub-Finslerian structure results. To begin, we define coordinate independent conditions for the motion of a free mechanical system subjected to linear nonholonomic constraints to be normal extremal with respect to the connected sub-Finslerian manifold, and vice versa. Then, we address the problem of characterizing the normal and abnormal extremals that validate both nonholonomic and Vakonomic equations for a free particle subjected to certain kinematic constraints.
Let be a nonholonomic sub-Finslerian structure and be a horizontal curve tangent to , then is said to be a normal extremal if there exists -admissible curve with base curve that is auto-parallel with respect to a normal -connection (Definition 3). While the curve is said to be an abnormal extremal if there exists along such that for all , with a -admissible curve with base curve .
Remark 4.
Cortés et al. [15], made a comparison between the solutions of the nonholonomic mechanical problem and the solutions of the Vakonomic dynamical problem for the general Lagrangian system. The Vakonomic dynamical problem, associated with a free particle with linear nonholonomic constraints, consists of finding normal extremals with respect to the sub-Finsleriann structure . It is an interesting comparison because the equations of motion for the mechanical problem are derived by means of d’Alembert’s principle, while the normal extremals are derived from a variation principle. Our next results are an alternate approach to the Cortés results, that is a coordinate-free approach, for the free particle case in the sub-Finslerian settings.
Definition 5.
Let be a nonholonomic sub-Finslerian structure, one can establish new tensorial operators according to the following:
such that
In addition, these tensorial operators have the following properties:
-
(I)
and are -bilinear in their independent variables;
-
(II)
The behavior of and can be identified pointwise;
-
(III)
and have a clear and unequivocal meaning for all and .
In the following, w show the relation between the operator and the curvature of the distribution using the following condition:
Suppose , then one has
for any Therefore, is trivial if and only if is involutive.
Definition 6.
Let denote the non-linear connection over on by the following formula
such that and
Proposition 3.
Let be a nonholonomic sub-Finslerian structure, assume that is a horizontal curve on and let be a -adapted -connection. Then, the following properties are satisfied:
-
(I)
If is a given initial point, then for each if and only if , such that and are parallel transported curves along w.r.t. and , respectively.
-
(II)
If is a given initial point, then for each if and only if , such that and are parallel transported curves along w.r.t. and , respectively.
Proof.
It is sufficient to prove that the first case and the second one follow similar arguments.
As a consequence of the definition of the tensorial operator , for any section of along , the next expression is true
Now, suppose that , then we get,
Conversely, it is well known that, regarding any connection, the parallel transported curves are uniquely determined by their initial conditions. ∎
It is clear that the second property of the above Proposition yields necessary and sufficient conditions for the existence of the curves that have abnormal extremals. In other words, is an abnormal extremal if and only if there exists a parallel transported section of along with respect to such that . Now, by the next Proposition, one can derive the necessary and sufficient condition for normal extremals to be a motion of a free nonholonomic mechanical system and vice versa.
Lemma 1.
Let be nonholonomic sub-Finslerian structures, and be a normal non-linear -connection. Then for any we have that if and only if
Proof.
We proved in [3], that if and only if Moreover, and the Barthel non-linear connection preserves the metric, i.e. , therefore
According to the fact that can be written as the direct sum of and , so the equivalence is pretty clear. ∎
Theorem 1.
If is a solution of a free nonholonomic system given by nonholonomic sub-Finslerian structures, then it is also a solution of the corresponding Vakonomic problem, and vice versa, if and only if there exists along such that
| (12) |
further, for all , .
Proof.
is the condition for any -admissible curve to be parallel transported with respect to a normal -connection. In other words,
and
Therefore, if and only if , such that is a solution of (12). Since Remark 3 and Proposition 2 guaranteed that is geodesically invariant, therefore, given any in , then (12) ensure that there is always a solution for all not only for in . ∎
5. Examples from Robotics
Typically, nonholonomic systems occur when velocity restrictions are applied, such as the constraint that bodies move on a surface without slipping. Bicycles, cars, unicycles, and anything with rolling wheels are all examples of nonholonomic sub-Finslerian structures.
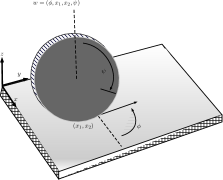
We will discuss the simplest wheeled mobile robot, which is a single upright rolling wheel, or unicycle, which is known as a kinematic penny rolling on a plane. Assume this wheel is of radius 1 and does not allow sideways sliding. Its configuration consists of the heading angle , the wheel’s point or the contact position , and the rolling angle (see Figure 1). Consequently, the space concerned has dimensions four, i.e., . There are two control functions deriving the wheel [14, 21]:
-
(I)
[rolling speed], the forward-backward rolling angular,
-
(II)
[turning speed], the speed of turning the heading direction .
With these controls, the rate of change of the coordinates can be expressed as follows:
| (13) |
As we generally do not worry about the wheel’s rolling angle, we could drop the fourth row from the above equation to get a simpler control system
| (14) |
which can be written as the following equation:
such that are called the controls and are called vector fields. Moreover, each vector field assigns a velocity to every point in the configuration space, so these vector fields are sometimes called velocity vector fields. Hence the velocity vector fields of any solution curve should lie in spanned by the following vector fields:
In a natural way, a sub-Riemannian metric on is gained by asserting the vector fields to be orthonormal vectors,
The integral of this quadratic form measures the work completed in rolling the heading angle at the rate and propelling the wheel ahead at the rate of . The sub-Riemannian structure will be adjusted as specified by the notion that curvature is costly: namely, it takes more attempts to steer the wheel in a tight circle with little forward or backward movement than to steer it in a wide arc. Therefore, the curvature of the projection given by this brings us to assume sub-Finsler metrics of the body
such that grows larger but remains constrained as increases. After we check the sub-Finslerian property, one finds the nonholonomic of the rolling wheel, often known as a unicycle, by the equation which is the kinematic model of the unicycle.
6. The sub-Laplacian associated with nonholonomic sub-Finslerian structures
The sub-Laplacian is a differential operator that arises naturally in the study of nonholonomic sub-Finslerian structures. These are geometric structures that generalize Riemannian manifolds, allowing for non-integrable distributions of tangent spaces.
On a sub-Finslerian manifold , there is a distinguished distribution of tangent spaces , which corresponds to the directions that are accessible by moving along curves with bounded sub-Finsler length. The sub-Finsler metric on measures the sub-Finsler length of curves with respect to this distribution.
The sub-Laplacian is defined as a second-order differential operator that acts on functions on and is defined in terms of the metric and the distribution . It is given by
where is the gradient vector field associated with which is the unique vector field satisfying for all vector fields on , and is the divergence operator with respect to the distribution , which is defined as the trace of the tangential part of the connection on .
Our goal in this section is to show that the sub-Laplacian measures the curvature of the sub-Finslerian structure. It captures the interplay between the sub-Finsler metric and the distribution , and plays a crucial role in many geometric and analytic problems on nonholonomic sub-Finslerian manifolds.
For example, the heat kernel associated with the sub-Laplacian provides a way to study the long-term behavior of solutions to the heat equation on sub-Finslerian manifolds. The Hodge theory on sub-Finslerian manifolds is also intimately related to the sub-Laplacian, and involves the study of differential forms that are harmonic with respect to the sub-Laplacian.
Remark 5.
To see that the sub-Laplacian measures the curvature of the sub-Finslerian structure, let us first recall some basic facts about Riemannian manifolds, see [16]. On a Riemannian manifold , the Laplace-Beltrami operator is defined as
where is the gradient vector field associated with the Riemannian metric , and is the divergence operator. It is a well-known fact that the Laplace-Beltrami operator measures the curvature of the Riemannian structure in the sense that it is zero if and only if the Riemannian manifold is flat.
The sub-Finslerian case is more complicated due to the presence of the distribution that is not integrable in general. However, the sub-Laplacian can still be understood as a curvature operator. To see this, we need to introduce the notion of a horizontal vector field.
A vector field on is called horizontal if it is tangent to the distribution . Equivalently, is horizontal if it is locally of the form , where are smooth functions and are smooth vector fields that form a basis for .
Given a horizontal vector field , we can define its sub-Finsler length as the infimum of the lengths of horizontal curves that are tangent to at each point. Equivalently, is the supremum of the scalar products over all horizontal vector fields with .
With these definitions in place, we can now show that the sub-Laplacian measures the curvature of the sub-Finslerian structure. More precisely, we have the following result:
Theorem 2.
The sub-Laplacian is zero if and only if the sub-Finslerian manifold is locally isometric to a Riemannian manifold.
Proof.
First, suppose that is locally isometric to a Riemannian manifold . Then we can choose a local frame of orthonormal horizontal vector fields with respect to the Riemannian metric . In this frame, we have
for any function on , and hence
Using the fact that the form a basis for , we can rewrite this as
where is the Laplace-Beltrami operator associated with the Riemannian metric . Since is zero if and only if is flat, it follows that is zero if and only if is locally isometric to a Riemannian manifold, which implies that the sub-Finslerian structure is also flat.
Conversely, suppose that is zero. Let be a local frame of horizontal vector fields such that for all , and let be the Riemannian metric induced by on . Using the definition of the sub-Laplacian and the fact that is zero, we have
where are local coordinates on that are adapted to (i.e., form a basis for the tangent space at each point). This implies that the Hessian of with respect to the Riemannian metric is zero, so is locally affine with respect to . In other words, is locally isometric to a Riemannian manifold. ∎
Remark 6.
In the above Theorem 2, we have shown that the sub-Laplacian measures the curvature of the sub-Finslerian structure. If is zero, then the sub-Finslerian manifold is locally isometric to a Riemannian manifold, and hence the sub-Finslerian structure is flat. If is nonzero, then the sub-Finslerian manifold is not locally isometric to a Riemannian manifold, and the sub-Finslerian structure is curved. This means that the shortest paths between two points on the manifold are not necessarily straight lines, and the geometry of the manifold is more complex than that of a Riemannian manifold.
Acknowledgements
The author gratefully acknowledges the helpful suggestions given by Dr. László Kozma during the preparation of the paper as well as his support for hosting me as a visiting research scholar at the University of Debrecen.
References
- [1] A. Agrachev, D. Barilari, and U. Boscain, A comprehensive introduction to sub-Riemannian geometry. Cambridge Studies in Advanced Mathematics (2019).
- [2] D. Bao, S.-S. Chern, and Z. Shen, An introduction to Riemann-Finsler geometry, Graduate Texts in Mathematics 200. Springer-Verlag, New York, (2000).
- [3] L. M. Alabdulsada, L. Kozma, On the connection of sub-Finslerian geometry. Int. J. Geom. Methods Mod. Phys.16, no. supp02, 1941006, (2019).
- [4] L. M. Alabdulsada, L. Kozma, Hopf-Rinow theorem of sub-Finslerian geometry. Rom. J. Math. Comput. Sci., 13(2), (2023).
- [5] L. M. Alabdulsada, Geodesically complete sub-Finsler manifolds and sub-Hamiltonian dynamics. Submitted
- [6] L. M. Alabdulsada, A note on the distributions in quantum mechanical systems. J. Phys.: Conf. Ser. 1999, 012112, (2021).
- [7] L. M. Alabdulsada, Sub-Finsler Geometry and Non-positive Curvature in Hilbert Geometry. PhD thesis, University of Debrecen, Hungary, (2019).
- [8] D. Barilari, U. Boscain, E. Le Donne, and M. Sigalotti, Sub-Finsler structures from the time-optimal control viewpoint for some nilpotent distributions. J. Dyn. Control Syst. 23(3), 547-575, (2017).
- [9] V. N. Berestovskii, Homogeneous manifolds with intrinsic metric. I., Sib. Math. J. 29, 887-897, (1988).
- [10] A. Bloch, L. Colombo, R. Gupta, and D. Martín de Diego, A geometric approach to the optimal control of nonholonomic mechanical systems, Analysis and Geometry in Control Theory and its Applications. INdAM 11, (Springer), pp. 35-64, (2015).
- [11] O. Calin, D.-C. Chang, Sub-Riemannian Geometry: General Theory and Examples. Cambridge University Press, New York, (2009).
- [12] C. Carathéodory, Untersuchungen über die Grundlagen der Termodynamik, Math. Ann., 67, 93-161, (1909).
- [13] W.-L. Chow, Über Systeme von linearen partiellen Differentialgleichungen erster Ordnung. (German) Math. Ann. 117, 98-105, (1939).
- [14] J.N. Clelland, C.G. Moseley, and G.R. Wilkens, Geometry of sub-Finsler Engel manifolds. Asian J. Math 11, no. 4, 699-726, (2007).
- [15] J. Cortés, M. de León, D. Martín de Diego, and S. Martínez, Geometric description of Vakonomic and nonholonomic dynamics. Comparison of Solutions. SIAM J. Control Optim. 41, no. 5, 1389-1412, (2002).
- [16] M. Gordina, T. Laetsch, Sub-Laplacians on Sub-Riemannian manifolds. Potential Anal 44, 811-837, (2016).
- [17] Gromov, M. Carnot-Caratheodory spaces seen from within. In Sub-Riemannian geometry, vol. 144 of Progr. Math. Birkhäuser, Basel, 79-323, (1996).
- [18] B. Langerock, Nonholonomic mechanics and connections over a bundle map. J. Phys. A, 34, 609-615, (2001).
- [19] A. D. Lewis, Affine connections and distributions with applications to nonholonomic mechanics. Rep. Math. Phys. 42, no. 1-2, 135-164, (1998).
- [20] C. López; E. Martínez, Sub-Finslerian metric associated to an optimal control system. SIAM J. Control Optim. 39, no. 3, 798-811, (2000).
- [21] Kevin M. Lynch, Frank C. Park, Modern robotics. Cambridge University Press, (2017).
- [22] L. Kozma, Holonomy structures in Finsler geometry, Handbook of Finsler Geometry ed. Antonelli (Kluwer), (2003).
- [23] J. Mitchell, On Carnot-Carathéodory metrics, J. Different. Geom., 21, No. 1, 35-45, (1985).
- [24] R. Montgomery, A tour of subriemannian geometries, their geodesics and applications. Mathematical Surveys and Monographs 91, Amer. Math. Soc., Providence, RI, (2002).
- [25] P. K. Rashevsky, Any two points of a totally nonholonomic space may be connected by an admissible line. Uch. Zap. Ped. Inst. Im. Liebknechta, Ser. Phys. Math. (in Russian). 2: 83-94, (1938).