1]\orgdivSchool of Mathematics, \orgnameShandong University, \orgaddress\cityJinan, \postcode250100, \countryChina
Two methods addressing variable-exponent fractional initial and boundary value problems and Abel integral equation
Abstract
Variable-exponent fractional models attract increasing attentions in various applications, while the rigorous analysis is far from well developed. This work provides general tools to address these models. Specifically, we first develop a convolution method to study the well-posedness, regularity, an inverse problem and numerical approximation for the sundiffusion of variable exponent. For models such as the variable-exponent two-sided space-fractional boundary value problem (including the variable-exponent fractional Laplacian equation as a special case) and the distributed variable-exponent model, for which the convolution method does not apply, we develop a perturbation method to prove their well-posedness. The relation between the convolution method and the perturbation method is discussed, and we further apply the latter to prove the well-posedness of the variable-exponent Abel integral equation and discuss the constraint on the data under different initial values of variable exponent.
keywords:
Variable exponent, Fractional differential equation, Integral equation, Mathematical analysispacs:
[MSC Classification]35R11, 45D05, 65M12
1 Introduction
Variable-exponent fractional models attract increasing attentions in various fields. For instance, the variable-exponent subdiffusion equation has been widely used in the anomalous transient dispersion [47, 48], while the variable-exponent two-sided space-fractional diffusion equation has been applied in, e.g., the turbulent channel flow [44] and the transport through a highly heterogeneous medium [41, 56]. More applications of variable-exponent fractional models can be found in a comprehensive review [49].
Nevertheless, the theoretical study of variable-exponent fractional initial and boundary value problems as well as the corresponding integral equations is far from well developed. For the subdiffusion model, a typical fractional initial value problem, there exist extensive investigations and significant progresses for the constant-exponent case [4, 17, 18, 27, 28, 29, 32, 34, 35, 38, 54, 55], while much fewer investigations for the variable exponent case can be found in the literature. There exist some mathematical and numerical results for the case of space-variable-dependent variable exponent [26, 31, 58]. For the time-variable-dependent case, there are some recent works changing the exponent in the Laplace domain [7, 16] such that the Laplace transform of the variable-exponent fractional operator is available. For the case that the exponent changes in the time domain, the only available results focus on the piecewise-constant variable exponent case such that the solution representation is available on each temporal piece [25, 51]. It is also commented in [25] that the case of smooth exponent remains an open problem. Recently, a local modification of subdiffusion by variable exponent is proposed in [60], where the techniques work only for the case such that this is mathematically a special case of the variable-exponent subdiffusion model. The general case remains untreated.
For fractional and nonlocal boundary value problems, there also exist sophisticated investigations for the constant-exponent case, see e.g. [2, 8, 11, 12, 13, 14, 24]. For the variable-exponent case, there are some corresponding theoretical results such as heat kernel estimates for variable-exponent nonlocal operators [6] and well-posedness study for a nonlocal model involving the doubly-variable fractional exponent and possibly truncated interaction [9]. Numerically, some efficient algorithms have been developed for the variable-exponent nonlocal and fractional Laplacian operators [9, 52]. Furthermore, a solution landscape approach has been applied for nonlinear problems involving variable-exponent spectral fractional Laplacian [53]. Nevertheless, rigorous analysis of variable-exponent fractional boundary value problems defined via fractional derivatives, e.g., the variable-exponent two-sided space-fractional diffusion equation in the form as [14], is not available in the literature.
For weakly singular integral equations such as the Abel integral equation, extensive results for the constant-exponent models can be found in the literature, see e.g. the books [5, 19]. For the case of variable exponent, there are rare studies. Recently, some works consider the mathematical and numerical analysis for the second-kind weakly singular Volterra intrgral equation of the variable exponent [33, 61]. For the first-kind integral equations, [59] develops an approximate inverse technique to convert the non-convolutional Abel intrgral equation of variable exponent to a second-kind weakly singular Volterra intrgral equation to facilitate the analysis. For the variable-exponent Abel intrgral equation of convolutional form, which is a more natural way to introduce the variable exponent, the corresponding study is not available.
The main difficulty for investigating variable-exponent fractional initial or boundary value problems as well as the first-kind variable-exponent Volterra integral equations is that the variable-exponent Abel kernel in these models could not be analytically treated by, e.g. the integral transform, and may not be positive definite or monotonic such that existing methods for partial differential equations do not apply directly. It is worth mentioning that in some variable-exponent fractional models considered in, e.g. [61, 62], both integer-order and variable-exponent fractional terms exist at the same time in space or time such that the latter serve as low-order terms. For this case, the complexity of the variable-exponent operators is weakened such that the analysis could be performed. For models considered in the current work, where the variable-exponent fractional terms serve as leading terms, the methods in [61, 62] do not apply.
In this work, we develop two methods, i.e. the convolution method and the perturbation method, to address the aforementioned issues, which provide general tools for analyzing different kinds of variable-exponent nonlocal models, including variable-exponent initial and boundary value problems and the variable-exponent Abel integral equation. Specifically, the main contributions are enumerated as follows:
-
Convolution method for initial value problems
We develop a convolution method to treat the variable-exponent fractional initial value problems, the idea of which is to calculate the convolution of the original model and a suitable kernel to get a more feasible formulation such that the analysis could be considered. The key of this method lies in introducing a “nice” kernel such that its convolution with the variable-exponent kernel leads to a so-called generalized identity function, which has favorable properties. Thus, the variable-exponent term could be transformed to a more feasible form without deteriorating the properties of the other terms in the model (as the introduced kernel is nice) such that the transformed model becomes tractable.We apply the convolution method to give a mathematical and numerical analysis for subdiffusion of variable exponent, a typical fractional initial value problem, including the following contents:
-
We prove its well-posedness and regularity by means of resolvent estimates, and characterize the singularity of the solutions in terms of the initial value of the exponent, which indicates an intrinsic factor of variable-exponent models.
-
The semi-discrete and fully-discrete numerical methods are developed and their error estimates are proved, without any regularity assumption on solutions or requiring specific properties of the variable-exponent Abel kernel such as positive definiteness or monotonicity. We again characterize the convergence order by .
-
Since the plays a critical role in characterizing properties of the model and the numerical method, we present a preliminary result for the inverse problem of determining .
-
-
Perturbation method for boundary value problems and integral equations
For problems such as variable-exponent two-sided space-fractional boundary value problems or distributed variable-exponent problems, the convolution method do not apply, cf. Section 5.1 for detailed reasons. Thus, we develop an alternative method called the perturbation method to treat these models, the idea of which is to replace the variable-exponent kernel by a suitable “nice” kernel such that their difference is a low-order perturbation term. Note that different from the convolution method, the perturbation method treats the variable-exponent term locally such that all other terms in the model keep unchanged.Then we investigate and apply the perturbation method from the following aspects:
-
We first show that for some models such as the variable-exponent subdiffusion, the convolution method and the perturbation method are indeed the same method in the sense that both methods could lead to the same transformed model.
-
We apply the perturbation method to prove the well-posedness of variable-exponent two-sided space-fractional diffusion-advection-reaction equation (including the variable-exponent fractional Laplacian equation as a special case) by showing the coercivity and continuity of the corresponding bilinear form, which are difficult to prove from the original form of the model since the variable-exponent fractional operators are not positive definite or monotonic.
-
We apply the perturbation method to prove the well-posedness of the weak solution of a distributed variable-exponent model.
-
We further apply the perturbation method to analyze the well-posedness of the variable-exponent Abel integral equation for three cases: , and . In particular, we observe that for the last two cases, an additional constraint is required to ensure the well-posedness, and a further extension implies that the well-posedness of the variable-exponent subdiffusion with also requires an additional constraint on initial values of the data.
-
The rest of the work is organized as follows: In Section 2 we introduce notations and preliminary results. In Section 3 we introduce the convolution method and then apply it to prove the well-posedness and regularity of the subdiffusion of variable exponent, as well as an inverse problem of determining the . In Section 4, semi-discrete and fully-discrete schemes for subdiffusion of variable exponent are proposed and analyzed. In Section 5, we introduce the perturbation method and then apply it to analyze the variable-exponent two-sided space-fractional boundary value problem and the distributed variable-exponent model. In Section 6 we further apply the perturbation method to analyze the variable-exponent Abel integral equation.
2 Preliminaries
2.1 Notations
Let with be the Banach space of th power Lebesgue integrable functions on . Denote the inner product of as . For a positive integer , let be the Sobolev space of functions with th weakly derivatives in (similarly defined with replaced by an interval ). Let and be its subspace with the zero boundary condition up to order . For , is defined via interpolation of and [1].
Let be eigen-pairs of the problem with the zero boundary condition. We introduce the Sobolev space for by which is a subspace of satisfying and [50]. For a Banach space , let be the space of functions in with respect to . All spaces are equipped with standard norms [1, 15].
Before introducing fractional derivative spaces, we present fractional operators. For , define
the left-sided fractional integral operator
the left-sided Riemann-Liouville fractional derivative operator and the left-sided Caputo fractional derivative operator [22]. The right-sided operators are denoted as , and , respectively, with standard definitions [22]. On a finite interval , the following semigroup property and the adjoint property hold
| (1) |
and it is proved in [14] that the following equivalent formulas hold for with or and for some positive constants –
| (2) | |||
where for and for .
We use to denote a generic positive constant that may assume different values at different occurrences. We use to denote the norm of functions or operators in , set for for brevity, and drop the notation in the spaces and norms if no confusion occurs. For instance, implies . Furthermore, we will drop the space variable in functions, e.g. we denote as , when no confusion occurs.
2.2 A generalized identity function
We propose the concept of the generalized identity function. For the variable-exponent Abel kernel
direct calculations show that
| (4) | ||||
It is clear that if for some constant , then
For the variable exponent , in general. However, as
we have which implies
| (5) |
Based on this property, we call a generalized identity function, which will play a key role in reformulating the model (9) to more feasible forms for mathematical and numerical analysis.
It is clear that is bounded over . To bound derivatives of , we use to obtain
We apply them to bound , and as
| (6) | ||||
| (7) | ||||
| (8) |
3 Convolution method
We develop the convolution method to analyze the fractional initial value problems of variable exponent, the main idea of which is to calculate the convolution of the original model and a suitable kernel to get a more feasible formulation. We illustrate this idea by the following subdiffusion model with variable exponent, which is a typical fractional parabolic equation
| (9) |
equipped with initial and boundary conditions
| (10) |
Here is a simply-connected bounded domain with the piecewise smooth boundary with convex corners, with denotes the spatial variables, and refer to the source term and the initial value, respectively, and the fractional derivative of order is defined via the variable-exponent Abel kernel [36]
It is worth mentioning that although we focus the attention on the fractional parabolic equation (i.e. ), the proposed method also works for the fractional hyperbolic equation (i.e. ) based on resolvent estimates proposed in, e.g. [57]. The latter is also known as the fractional diffusion-wave equation, for which the is defined as
3.1 A transformed model
3.2 Well-posedness of transformed model
We show the well-posedness of model (12) with the initial and boundary conditions (10) in the following theorem.
Proof.
By [1], we have the following relations for
| (15) |
which means that
| (16) |
Thus we take throughout this proof.
We first consider the case of zero initial condition, i.e. , and define the space equipped with the norm for some , which is equivalent to the standard norm for . Define a mapping by where satisfies
| (17) |
equipped with zero initial and boundary conditions. By (13), could be expressed as
| (18) |
To show the well-posedness of , we differentiate (18) to obtain
| (19) |
We use the Laplace transform to evaluate the second right-hand side term to get
| (20) |
We apply to take the inverse Laplace transform of (20) to get
| (21) |
where We use (3) to bound by
| (22) |
To estimate , recall that , which implies
| (23) |
We reformulate as
| (24) |
where
| (25) |
By (6), we have
| (26) |
which means that . We apply this to further rewrite (24) as
| (27) |
Based on (25) we apply (7) and a similar estimate as (26) to obtain
| (28) |
Thus, we finally bound as
| (29) |
We invoke (16) and (29) to conclude that
| (30) |
where we used the fact that
| (31) |
Consequently, we apply (22), (30) and the Young’s convolution inequality in (21) to bound the second right-hand side term of (19)
The first right-hand side term of (19) could be bounded by similar and much simper estimates as above
In particular, we could apply and the Young’s convolution inequality to further bound as
| (32) |
We summarize the above two estimates to conclude that
| (33) |
which implies that such that is well-posed.
To show the contractivity of , let and such that satisfies (17) with and . Thus (33) implies . Choose large enough such that , that is, is a contraction mapping such that there exists a unique solution for model (12) with zero initial and boundary conditions, and the stability estimate could be derived directly from (33) with and large and the equivalence between two norms and for
| (34) |
For the case of non-zero initial condition, a variable substitution could be used to reach the equation (12) with and replaced by and , respectively, equipped with zero initial and boundary conditions. As , we apply the well-posedness of (12) with zero initial and boundary conditions to find that there exists a unique solution with the stability estimate derived from (34). By , we finally conclude that is a solution to (12)–(10) in with the estimate
| (35) |
The uniqueness of the solutions to (12)–(10) follows from that to this model with . To estimate the norm of , we apply on both sides of (13) and employ (14) to obtain
| (36) |
We combine this with the Young’s convolution inequality, (32), (35) and the estimate of
| (37) | ||||
to get
which completes the proof. ∎
3.3 Well-posedness of original model
Proof.
We first show that a solution to (12)–(10), which uniquely exists in by Theorem 1, is also a solution to (9)–(10). If for solves (12)–(10), then (12) could be rewritten as
which means that
| (38) |
for some constant . We apply the on both sides and use the boundedness of to obtain
| (39) |
for some satisfying . To estimate , we employ (36) to obtain
We then take the on both sides and apply (37) to find
for some satisfying . We invoke this in (39) to finally obtain Passing implies , which, together with (38), gives We then calculate its convolution with and apply to obtain Differentiating this equation leads to (9), which implies solves (9)–(10).
3.4 Solution regularity
We give pointwise-in-time estimates of the temporal derivatives of the solutions to model (9)–(10), which are feasible for numerical analysis.
Theorem 3.
Suppose and for for . Then
Remark 1.
Proof.
We mainly prove the case since the case could be proved by the same procedure. As shown in the proof of Theorem 2, the unique solution to (12)–(10) in is also the unique solution to (9)–(10). Thus we could perform analysis based on (13). We differentiate both sides of (13) with respect to and apply [22, Lemma 6.2] with to obtain Then we further apply on both sides of this equation to obtain
| (40) |
where . We apply on both sides and invoke [22, Theorem 6.4] to get
| (41) |
By (6) and
| (42) |
we have
| (43) |
for a.e. where we applied the Young’s convolution inequality with for some (such that ) to get
| (44) |
We invoke (43) in (41) and apply the same treatment as (20)–(22) to bound the last right-hand side term of (41) to obtain for
| (45) |
where . According to (15), we have while by the same treatment as (24)–(29), we have We invoke these two equations in (45) to obtain
which, together with (44), yields
| (46) |
for a.e. , that is,
for and . For a fixed , we have for a.e.
Note that
We combine the above two equations to get for a.e.
which implies
Selecting large enough we find which means
| (47) |
We take to complete the proof. ∎
Theorem 4.
Suppose and for and . Then
Proof.
We mainly prove the case since the case could be proved by the same procedure. We apply (21) to (40) and multiply the resulting equation by to obtain
Differentiating this equation with respect to yields
| (48) |
Then we bound the norms of –. By Theorem 3, we have for a.e. . We then apply [22, Theorem 6.4] to bet To bound , we apply (42) to obtain
Differentiate this equation to get
We apply Theorem 3, (6), (7) and a similar argument as (44) to obtain
where .
To treat the other terms, we apply the same derivations as (23)–(29), (15) and Theorem 3 to obtain for
| (49) | ||||
| (50) |
We then apply (22) and (49) to bound
and
To bound , we follow the idea proposed in, e.g. [22, Page 190], to set in and apply the variable substitution to bound as
We apply this and a similar estimate as to bound as
To bound , we apply (27) to bound (50) as
which, together with (22), implies
To bound , we differentiate (50) with respect to to obtain
| (51) |
By (28), we have
which, together with (7) and (8), implies
Furthermore, We incorporate these estimates and (28) with (51) to obtain
for a.e. where we used the Young’s convolution inequality to bound as (44). We invoke this and (22) to bound as
We invoke the estimates of – in (48) to conclude that
Then we follow exactly the same procedure as (46)–(47) to complete the proof of this theorem. ∎
3.5 An inverse problem
From previous results, we notice that the initial value plays a critical role in determining the properties of the model. Thus, it is meaningful to determine from observations of , which formulates an inverse problem. Here we follow the proof of [22, Theorem 6.31] to present a preliminary result for demonstrating the usage of equivalent formulations derived by the generalized identity function.
Proof.
By Theorem 2 the model (9)–(10) is well-posed and could be reformulated as (12). We then further calculate the convolution of (12) with and to get
| (52) |
the solution of which could be expressed as where could be expressed via the Mittag-Leffler function [20]
Also, (52) implies . Then one could follow the proof of Theorem 3 to further show that , which will be used later.
By the derivations of [22, Theorem 6.31] we find that if we can show
| (53) |
then the proof of [22, Theorem 6.31] is not affected at all by the term such that we immediately reach the conclusion by [22, Theorem 6.31].
To show the first statement, we first apply integration by parts to obtain
and we follow similar derivations as (25)–(28) to obtain for . We invoke this and apply for [22, Page 257] to bound as
We combine this with the following estimates [20]
to obtain
where we used the Weyl’s law for . We set to obtain for . Thus we have , which implies the first statement in (53). The second statement could be proved similarly and we thus omit the details. ∎
4 Numerical approximation
4.1 A numerically-feasible formulation
We turn the attention to numerical approximation. As the kernel in (9) may not be positive definite or monotonic, it is not convenient to perform numerical analysis for numerical methods of model (9). Here a convolution kernel is said to be positive definite if for each
and with and is a typical positive definite convolution kernel, see e.g. [40].
To find a feasible model for numerical discretization, we recall that the convolution of (9) and generates (11), and we apply the integration by parts to rewrite (11) as
| (54) |
It is clear that the solution to model (9)–(10) solves (54)–(10). Then we intend to show that (54)–(10) has a unique solution in such that both (9)–(10) and (54)–(10) have the same unique solution in .
Suppose solves (54)–(10), then solves
with homogeneous initial and boundary conditions. As the first two terms belong to , so does the third term such that we differentiate this equation to get
that is, satisfies the transformed model (12) with and homogeneous initial and boundary conditions. Then Theorem 1 leads to , which implies that it suffices to numerically solve (54)–(10) in order to get the solutions to the original model (9)–(10). Furthermore, one could apply the substitution to transfer the initial condition of (54)–(10) to in order to apply the positive-definite quadrature rules
| (55) | ||||
| (56) |
For the sake of numerical analysis, we further multiply on both sides of (55) to get an equivalent model with respect to
| (57) | ||||
| (58) |
Note that has the same regularity as and if we find the numerical solution to (57)–(58), we could immediately define the numerical solution to (55)–(56) by the relation as shown later.
4.2 Semi-discrete scheme and error estimate
Define a quasi-uniform partition of with mesh diameter and let be the space of continuous and piecewise linear functions on with respect to the partition. Let be the identity operator. The Ritz projection defined by for any has the approximation property for [50].
The weak formulation of (57)–(58) reads for any
| (59) |
and the corresponding semi-discrete finite element scheme is: find such that
| (60) |
After obtaining , define the approximation to the solution of (55)–(56) as
Theorem 6.
Suppose and for . Then the following error estimate holds
Proof.
Set with and . Then we subtract (59) from (60) and select to obtain
which, together with , implies
Integrate this equation on and apply the positive definiteness of to obtain
| (61) |
By Theorem 3 we have
Thus, such that
| (62) |
which, together with (61), leads to
We bound the first right-hand side term as
By (6) and a similar argument as (31), we have
for . We combine the above three estimates and set large enough to get and thus . We finally apply and to complete the proof. ∎
4.3 Fully-discrete scheme and error estimate
Partition by for and . Let be the piecewise linear interpolation operator with respect to this partition. We approximate the convolution terms in (57) by the quadrature rule proposed in, e.g. [39, Equation (4.16)]
where
with truncation errors and , respectively. Note that is indeed a function of . To see this, direct calculations yield
It is clear that , and for and for . Thus we have where for is defined as
| (63) |
and
| (64) |
It is shown in [39, Lemma 4.8] that the quadrature rule is weakly positive such that, since , the following relation holds
| (65) |
where . Furthermore, [39, Lemma 4.8] gives the estimates of the truncation errors as follows
| (66) | ||||
Thus the weak formulation of (57)–(58) reads for any
| (67) |
and the corresponding fully-discrete finite element method reads: find for such that
| (68) |
After solving this scheme for , we define the numerical approximation for the solution of (55)–(56) as
| (69) |
Define the discrete-in-time norm as . We prove error estimate of under the norm in the following theorem.
Theorem 7.
Suppose and for . Then the following error estimate holds
Proof.
Denote with and . We subtract (67) from (68) with to obtain
We sum this equation multiplied by from to for some and apply (65) and to obtain
| (70) |
Then we intend to bound the right-hand side terms. By (62) we have
| (71) |
which leads to
By Theorems 3 and 4 and , we have and for . Also, the fact that for implies . We apply them to bound by (66)
| (72) | ||||
| (73) |
Then we invoke both (72) and (73) to bound as
The could be estimated following exactly the same procedure with the bound dominated by . We invoke the above estimates in (70) to get
By with the definition of in (63)–(64), the discrete Young’s convolution inequality and a similar estimate as (71), we have
Combining the above three equations lead to
Setting large enough and choosing yield
We combine this with to get
and we apply this and and (69) to complete the proof. ∎
4.4 Numerical experiments
4.4.1 Initial singularity of solutions
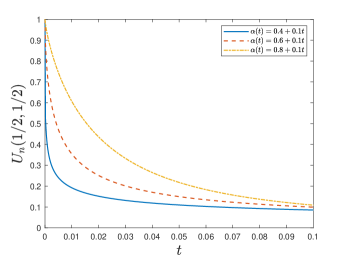
Let , , and . As we focus on the initial behavior of the solutions, we take a small terminal time . We use the uniform spatial partition with the mesh size and a very fine temporal mesh size to capture the singular behavior of the solutions near . Numerical solutions defined by (69) is presented in Figure 1 (left) for three cases:
| (74) |
We find that as decreases, the solutions change more rapidly, indicating a stronger singularity that is consistent with the analysis result in Theorem 3.
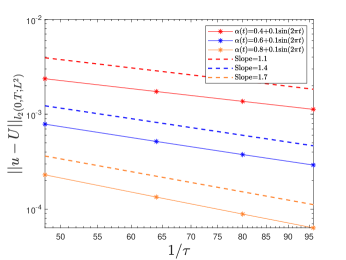
4.4.2 Numerical accuracy
Let , and the exact solution The source term is evaluated accordingly and we select As the spatial discretization is standard, we only investigate the temporal accuracy of the numerical solution defined by (69). We use the uniform spatial partition with the mesh size and present log-log plots of errors under the norm in Figure 1 (right) for different in (74), which indicates the convergence order of as proved in Theorem 7.
5 Perturbation method
5.1 Motivation
Despite the applicability of the convolution method to fractional initial value problems with variable exponent, it has some restrictions. Below we give two examples that the convolution method does not apply, which motivates an alternative method to analyze these problems.
Example 1. Consider a two-sided space-fractional diffusion-advection-reaction equation with variable exponent [41, 44], which is a variable-exponent extension of the standard space-fractional boundary value problem proposed in [14]
| (75) | ||||
| (76) |
where the left and right fractional integrals of variable exponent are defined as
We focus on the two-sided case, i.e. , since the one-sided case or is simpler.
It is worth mentioning that for , and for some , it is shown in [2, Lemma 2.3] that the operator on the left-hand side of (75) is indeed the fractional Laplacian operator of order . Thus, (75) could also be viewed as a variable-exponent extension of the fractional Laplacian equation under and .
Due to the impacts of , it is difficult to apply analytical methods to study (75), and the convolution method does not apply due to the existence of both left and right fractional integrals of variable exponent. To be specific, although one could employ the convolution method to convert the term to a more feasible form, the operator is accordingly transformed to a much more complicated Fredholm type operator, which hinders further analysis.
Example 2. Consider a variable-exponent version of the distributed-order diffusion equation, which is firstly proposed in [36] and could serve as a pointwise-in-time shift of the domain of the exponent
| (77) | ||||
| (78) |
where the distributed variable-exponent time-fractional derivative is defined as
for some non-negative continuous function satisfying with and satisfying over for some . Without loss of generality, we assume . Otherwise, one could apply the variable substitution to transfer the initial value of to . Note that when , (77)–(78) is a standard distributed-order diffusion equation. Furthermore, the conditions on ensure that
| (79) |
Due to the impacts of , it is difficult to apply analytical methods to study (77), while the convolution method does not apply since the existence of the distributed-order integral makes it difficult to find a suitable kernel such that the its convolution with generates a generalized identity function.
5.2 Idea of the method
Motivated by the aforementioned questions, we propose an alternative method called the perturbation method to resolve them. The main idea of the perturbation method is to replace the variable-exponent kernel by a suitable kernel such that their difference serves as a low-order perturbation term, without affecting other terms in the model.
To illustrate this idea based on the subdiffusion model (9)–(10), we split the kernel into two parts as follows
| (80) |
where, by direct calculations and the notation ,
As
could be bounded as
| (81) |
By similar estimates we bound as
| (82) |
We then invoke (80) in (9) to get
| (83) |
We apply the integration by parts to get
which, together with (83), leads to
As the term is a low-order term compared with , one could analyze this model by means of Laplace transform as we did in Section 3.
Relation between two methods
Note that the transformed model (83) looks different from (12). However, if we further apply on both sides of (83), we have
| (84) |
Now the two transformed models (84) and (12) are exactly the same equation if we can show that
To prove this relation, recall that with and . Then direct calculations show that
Thus, for models such as the variable-exponent subdiffusion equation (9), both the convolution method and the perturbation method could transform the original problem to the same model such that the analysis such as those in Section 3 could be performed. Nevertheless, the perturbation method applies to more complicated models such as those in Examples 1-2 , as we will see later.
5.3 Space-fractional problem with variable exponent
We consider the two-sided space-fractional diffusion-advection-reaction equation (75)–(76) proposed in Example 1. It is worth mentioning that if we denote the equation (75) as , the upcoming analysis also applies to the multi-dimensional case, e,g, the two-dimensional case for some and on .
Recall that and . Following the idea of the perturbation method, we split the kernels in and as
and
By similar estimates as (81)–(82), we have the following estimates for
| (85) |
Then equation (75) is equivalently rewritten as
By integration by parts, we define the corresponding bilinear form by
Then the variational formulation of (75)–(76) reads: find where such that
| (86) |
The following estimates are critical in both mathematical and numerical analysis.
Lemma 1.
Suppose and is bounded. Then there exist a positive constant such that when
the following properties hold for any
for some positive constants and .
Proof.
By the Sobolev embedding theorem, we have . To show the coercivity, we apply (2) to get
| (87) |
Then an integration by parts yields
| (88) |
The estimate of the term containing requires technical derivations. By (1),direct calculations yield
By the relation when [22], we have
| (89) |
By variable substitution we have
| (90) | |||
By (85) we have
then we invoke (90) to get
which, together with the fact that is a bounded linear operator in , leads to
We invoke this in (89) to finally obtain for
| (91) |
By similar estimates, we have the analogous result
| (92) |
Combining (87), (88), (91) and (92) leads to
Thus, for and
we reach the coercivity.
Based on Lemma 1 and the estimate for
which means that is a continuous linear functional over , we apply the Lax-Milgram theorem to reach the following conclusion.
5.4 Distributed variable-exponent model
We employ the idea of the perturbation method to analyze the distributed variable-exponent model (77)–(78) in Example 2. We apply to split into two parts as follows
| (93) |
Based on (79), direct calculations show that
| (94) | ||||
| (95) |
We then invoke (93) in (77) and apply (94) to get
| (96) |
where is the standard distributed-order operator defined as [30, 36]
Then we follow [23, Section 3] to take the Laplace transform of (96) to represent as
| (97) |
Here and are given as
where and with , with the following estimates [23, Lemma 3.1]
| (98) |
Then we follow [23] to define a weak solution to (77)–(78): a function is a weak solution to (77)–(78) if it satisfies (97). The following theorem gives the existence and uniqueness of the weak solution to (77)–(78).
Theorem 9.
Proof.
Define a mapping by where satisfies
| (99) |
For , the equivalent norm of is given as . Then we first show that is well defined. For , we apply the norm on both sides of (99) and use (98) and (95) to get
| (100) |
where we applied a similar estimate as (31)
Thus, such that is well defined. To show the contractivity, it suffices to consider (99) with and . Then (100) gives
Choosing large enough ensures , which implies that is a contraction mapping such that there exists a unique solution in to (97). The stability estimate follows from (100) with and large enough. The proof is thus completed. ∎
6 Application to Abel integral equation
We further demonstrate the usage of the perturbation method by analyzing the following Abel integral equation of variable exponent, a typical first-kind Volterra integral equation with weak singularity that would broaden the usefulness of its constant-exponent version as commented in [33]
| (101) |
6.1 The case
We prove the well-posedness of (101) in the following theorem.
Theorem 10.
Suppose . Then the integral equation (101) admits a unique solution in such that
If further for , then
Proof.
By the idea of the perturbation method, we split as (80) such that the integral equation (101) could be equivalently rewritten as
| (102) |
As is the inverse operator of , we apply on both sides of this equation to get
| (103) |
As is bounded (see (81)), we have as such that (104) could be further rewritten as a second-kind Volterra integral equation
| (104) |
By and (82), we have
| (105) |
which means that . Furthermore, for , we have
| (106) |
Thus, by classical results on the second-kind Volterra integral equation, see e.g. [21, Theorem 2.3.5], model (104) admits a unique solution in . As the convolution of and (104) leads to (103) and thus (101), the original model (101) has an solution. The uniqueness of the solution of (101) follows from that of (104).
To derive the first stability estimate, we multiply (104) by for some to get
Apply the norm on both sides of this equation and employ (105)–(106) and the Young’s convolution inequality to get
| (107) |
where we use a similar estimate as (31) to bound . Then we choose large enough to get the first stability result.
To obtain the second estimate of this theorem, (104), (105) and (106) imply
We apply the Young’s convolution inequality with for to get
Combine the above two equations leads to
Then an application of the weakly singular Gronwall inequality, see e.g. [22, Theorem 4.2], leads to the second estimate of this theorem and thus completes the proof. ∎
6.2 The case
We consider the special case . If , then such that (102) becomes
Differentiate this equation and use the estimate (81) lead to
| (108) |
Theorem 11.
Suppose , . Then if , the integral equation (101) admits a unique solution in such that
If further for for some constant , then
Proof.
By (82), such that we apply similar and simpler estimates as (101)–(107) to reach that (108) admits a unique solution with the estimate
Then we integrate (108) to obtain
Thus, the condition implies that the original problem (101) has an solution. The uniqueness follows from that of (108). The second estimate follows immediately from the weakly singular Gronwall inequality. ∎
6.3 The case
For this case, we further assume to simplify the derivations and highlight the main ideas. We apply the idea of the perturbation method to give a different splitting of from (80) as follows
Direct calculations show that
| (109) |
As , we have
such that
| (110) |
Combine the above three estimates to get
We thus rewrite (101) as
By (110), is bounded. Then we apply the expression of in (109) to evaluate as
By (110), the first right-hand side term is bounded. For the second right-hand side term, we rewrite the numerator as
By (110), we have
and direct calculations yield
Combine the above four estimates to get
Thus, we follow exactly the same analysis procedure as that in Section 6.2 to reach the same conclusions as Theorem 11 for the case .
6.4 Comments on the restriction
From the above analysis, we find that for either or , the restriction is required to ensure the well-posedness, which is not needed for the case that . The inherent reason is that for either or , the kernel in the integral equation (101) is indeed a non-singular kernel. Specifically, for we could apply
to get , and for with , (110) implies . As for the case of non-singular kernels, the solutions are usually bounded under smooth data (cf. Theorem 11), one could pass the limit in the integral equation (101) to find that needs to be to ensure the consistency.
Restriction for subdiffusion (9) with
The above observation could also be extended for the variable-exponent subdiffusion model (9) with . By the estimate (110) we have . If , the kernel is a non-singular kernel. Thus when we pass the limit on both sides of (9), its well-posedness may require the condition
if is an absolutely continuous function for each . In fact, such condition has been pointed out in, e.g. [10, 46] for nonlocal-in-time diffusion models with non-singular kernels, and what we did above is showing that the kernel is such a non-singular kernel when and .
Conflict of interest statement
On behalf of all authors, the corresponding author states that there is no conflict of interest.
Data availability statement
No datasets were generated or analyzed during the current study.
Acknowledgments
This work was partially supported by the National Natural Science Foundation of China (No. 12301555), the National Key R&D Program of China (No. 2023YFA1008903), and the Taishan Scholars Program of Shandong Province (No. tsqn202306083).
References
- [1] R. Adams and J. Fournier, Sobolev Spaces, Elsevier, San Diego, 2003.
- [2] G. Acosta, J. Borthagaray, O. Bruno and M. Maas, Regularity theory and high order numerical methods for the (1D)-fractional Laplacian. Math. Comp., 87 (2018),1821–1857.
- [3] G. Akrivis, B. Li and C. Lubich, Combining maximal regularity and energy estimates for time discretizations of quasilinear parabolic equations. Math. Comp., 86 (2017), 1527–1552.
- [4] L. Banjai and C. Makridakis, A posteriori error analysis for approximations of time-fractional subdiffusion problems. Math. Comp., 91 (2022), 1711–1737.
- [5] H. Brunner, Volterra Integral Equations. Cambridge Monographs on Applied and Computational Mathematics, vol. 30. Cambridge: Cambridge University Press, 2017.
- [6] X. Chen, Z. Chen and J. Wang, Heat kernel for nonlocal operators with variable-order. Stoch. Proc. Appl., 130 (2020), 3574–3647.
- [7] E. Cuesta, M. Kirane, A. Alsaedi and B. Ahmad, On the sub-diffusion fractional initial value problem with time variable order. Adv. Nonlinear Anal., 10 (2021), 1301–1315.
- [8] M. D’Elia, Q. Du, C. Glusa, M. Gunzburger, X. Tian and Z. Zhou, Numerical methods for nonlocal and fractional models. Acta Numer., 29 (2020), 1–124.
- [9] M. D’Elia and C. Glusa, A fractional model for anomalous diffusion with increased variability: Analysis, algorithms and applications to interface problems. Numer. Methods Partial Differ. Eq., 38 (2022), 2084–2103.
- [10] K. Diethelm, R. Garrappa, A. Giusti and M. Stynes, Why fractional derivatives with nonsingular kernels should not be used. Fract. Calc. Appl. Anal., 23 (2020), 610–634.
- [11] Q. Du, Nonlocal Modeling, Analysis, and Computation, SIAM, Philadelphia, 2019.
- [12] Q. Du, M. Gunzburger, R. Lehoucq and K. Zhou, Analysis and approximation of nonlocal diffusion problems with volume constraints. SIAM Rev., 54 (2012), 667–696.
- [13] V. Ervin, Regularity of the solution to fractional diffusion, advection, reaction equations in weighted Sobolev spaces. J. Differ. Equ. 278 (2021), 294–325.
- [14] V. Ervin and J. Roop, Variational formulation for the stationary fractional advection dispersion equation. Numer. Meth. PDEs, 22 (2006), 558–576.
- [15] L. Evans, Partial Differential Equations, Graduate Studies in Mathematics, V 19, American Mathematical Society, Rhode Island, 1998.
- [16] R. Garrappa and A. Giusti, A computational approach to exponential-type variable-order fractional differential equations. J. Sci. Comput., 96 (2023), 63.
- [17] Y. Giga, Q. Liu and H. Mitake, On a discrete scheme for time fractional fully nonlinear evolution equations. Asymptot. Anal., 120 (2020), 151–162.
- [18] Y. Giga, H. Mitake and S. Sato, On the equivalence of viscosity solutions and distributional solutions for the time-fractional diffusion equation. J. Differ. Equ., 316 (2022), 364–386.
- [19] R. Gorenflo and S. Vessella, Abel Integral Equations. Analysis and Applications. Springer-Verlag, Berlin, 1991.
- [20] R. Gorenflo, A. Kilbas, F. Mainardi and S. Rogosin, Mittag-Leffler Functions, Related Topics and Applications. Springer, New York, 2014.
- [21] G. Gripenberg, S. Londen and O. Staffans, Volterra Integral and Functional Equations, in: Encyclopedia Math. Appl., vol. 34, Cambridge University, Cambridge, 1990.
- [22] B. Jin, Fractional differential equations–an approach via fractional derivatives, Appl. Math. Sci. 206, Springer, Cham, 2021.
- [23] B. Jin and Y. Kian, Recovery of a distributed order fractional derivative in an unknown medium. Commun. Math. Sci., 21 (2023), 1791–1813.
- [24] B. Jin, R. Lazarov, J. Pasciak and Z. Zhou, Error analysis of a finite element method for the space-fractional parabolic equation. SIAM J. Numer. Anal., 52 (2014), 2272–2294.
- [25] Y. Kian, M. Slodička, É. Soccorsi and K. Bockstal, On time-fractional partial differential equations of time-dependent piecewise constant order. arXiv:2402.03482.
- [26] Y. Kian, E. Soccorsi and M. Yamamoto, On time-fractional diffusion equations with space-dependent variable order, Ann. Henri Poincaré, 19 (2018), 3855–3881.
- [27] Y. Kian, Z. Li, Y. Liu and M. Yamamoto, The uniqueness of inverse problems for a fractional equation with a single measurement. Math. Ann., 380 (2021), 1465–1495.
- [28] N. Kopteva, Error analysis of an L2-type method on graded meshes for a fractional-order parabolic problem. Math. Comp., 90 (2021), 19–40.
- [29] A. Kubica, K. Ryszewska, M. Yamamoto, Time-fractional differential equations, Springer Briefs in Mathematics. Springer Nature, Singapore, 2020.
- [30] A. Kubica, K. Ryszewska and R. Zacher, Hölder continuity of weak solutions to evolution equations with distributed order fractional time derivative. Math. Ann., (2024) https://doi.org/10.1007/s00208-024-02806-y
- [31] K. Le and M. Stynes, An -robust semidiscrete finite element method for a Fokker-Planck initial-boundary value problem with variable-order fractional time derivative. J. Sci. Comput., 86 (2021), 22.
- [32] D. Li, J. Zhang and Z. Zhang, Unconditionally optimal error estimates of a linearized Galerkin method for nonlinear time fractional reaction-subdiffusion equations, J. Sci. Comput., 76 (2018), 848–866.
- [33] H. Liang and M. Stynes, A general collocation analysis for weakly singular Volterra integral equations with variable exponent. IMA J. Numer. Anal., 2023. (online).
- [34] H. Liao, T. Tang and T. Zhou, A second-order and nonuniform time-stepping maximum-principle preserving scheme for time-fractional Allen-Cahn equations. J. Comput. Phys., 414 (2020), 109473.
- [35] C. Lin and G. Nakamura, Classical unique continuation property for multi-term time-fractional evolution equations. Math. Ann., 385 (2023), 551–574.
- [36] C. Lorenzo and T. Hartley, Variable order and distributed order fractional operators, Nonlinear Dyn., 29 (2002), 57–98.
- [37] C. Lubich, Convolution quadrature and discretized operational calculus. I and II, Numer. Math., 52 (1988) 129–145 and 413–425.
- [38] Y. Luchko, Initial-boundary-value problems for the one-dimensional time-fractional diffusion equation. Fract. Calc. Appl. Anal., 15 (2012), 141–160.
- [39] W. McLean and V. Thomée, Numerical solution of an evolution equation with a positive-type memory term. J. Austral. Math. Soc. Ser. B, 35 (1993), 23–70.
- [40] K. Mustapha and W. McLean, Discontinuous Galerkin method for an evolution equation with a memory term of positive type. Math. Comp., 78 (2009), 1975–1995.
- [41] G. Pang, P. Perdikaris, W. Cai and G. Karniadakis, Discovering variable fractional orders of advection-dispersion equations from field data using multi-fidelity Bayesian optimization. J. Comput. Phys., 348 (2017), 694–714.
- [42] J. Shi and M. Chen, High-order BDF convolution quadrature for subdiffusion models with a singular source term. SIAM J. Numer. Anal., 61 (2023), 2559–2579.
- [43] K. Sakamoto and M. Yamamoto, Initial value/boundary value problems for fractional diffusion-wave equations and applications to some inverse problems, J. Math. Anal. Appl., 382 (2011), 426–447.
- [44] F. Song and G. Karniadakis, Variable-order fractional models for wall-bounded turbulent flows. Entropy, 23 (2021), 782.
- [45] M. Stynes, E. O’Riordan, and J. Gracia, Error analysis of a finite difference method on graded mesh for a time-fractional diffusion equation, SIAM J. Numer. Anal., 55 (2017), 1057–1079.
- [46] M. Stynes, Fractional-order derivatives defined by continuous kernels are too restrictive. Appl. Math. Lett., 85 (2018), 22–26.
- [47] H. Sun, Y. Zhang, W. Chen and D. Reeves, Use of a variable-index fractional-derivative model to capture transient dispersion in heterogeneous media, J. Contam. Hydrol., 157 (2014) 47–58.
- [48] H. Sun, W. Chen and Y. Chen, Variable-order fractional differential operators in anomalous diffusion modeling. Physica A, 388 (2009), 4586–4592.
- [49] H. Sun, A. Chang, Y. Zhang and W. Chen, A review on variable-order fractional differential equations: mathematical foundations, physical models, numerical methods and applications. Fract. Calc. Appl. Anal., 22 (2019), 27–59.
- [50] V. Thomée, Galerkin Finite Element Methods for Parabolic Problems, Lecture Notes in Mathematics 1054, Springer-Verlag, New York, 1984.
- [51] S. Umarov and S. Steinberg, Variable order differential equations with piecewise constant order-function and diffusion with changing modes. Z. Anal. Anwend., 28 (2009), 131–150.
- [52] Y. Wu and Y. Zhang, Variable-order fractional Laplacian and its accurate and efficient computations with meshfree methods. arXiv:2402.02284.
- [53] B. Yu, X. Zheng, P. Zhang and L. Zhang, Computing solution landscape of nonlinear space-fractional problems via fast approximation algorithm. J. Comput. Phys., 468 (2022), 111513.
- [54] R. Zacher, A De Giorgi-Nash type theorem for time fractional diffusion equations. Math. Ann., 356 (2013), 99–146.
- [55] R. Zacher, Time fractional diffusion equations: solution concepts, regularity, and long-time behavior. Handbook of fractional calculus with applications, Vol. 2, 159–179, De Gruyter, Berlin, 2019.
- [56] F. Zeng, Z. Zhang and G. Karniadakis, A generalized spectral collocation method with tunable accuracy for variable-order fractional differential equations, SIAM J. Sci. Comput., 37 (2015), A2710–A2732.
- [57] Z. Zhang and Z. Zhou, Backward diffusion-wave problem: Stability, regularization, and approximation. SIAM J. Sci. Comput., 44 (2022), A3183–A3216.
- [58] T. Zhao, Z. Mao and G. Karniadakis, Multi-domain spectral collocation method for variable-order nonlinear fractional differential equations. Comput. Meth. Appl. Mech. Engrg., 348 (2019), 377–395.
- [59] X. Zheng, Approximate inversion for Abel integral operators of variable exponent and applications to fractional Cauchy problems. Fract. Calc. Appl. Anal., 25 (2022), 1585–1603.
- [60] X. Zheng, Y. Li and W. Qiu, Local modification of subdiffusion by initial Fickian diffusion: Multiscale modeling, analysis and computation. arXiv:2401.16885.
- [61] X. Zheng and H. Wang, An optimal-order numerical approximation to variable-order space-fractional diffusion equations on uniform or graded meshes. SIAM J. Numer. Anal., 58 (2020), 330–352.
- [62] X. Zheng and H. Wang, An error estimate of a numerical approximation to a hidden-memory variable-order space-time fractional diffusion equation, SIAM J. Numer. Anal., 58 (2020), 2492–2514.