Variational attraction of the KAM torus for conformally symplectic systems
Abstract.
For the conformally symplectic system
with a positive definite Hamiltonian, we discuss the variational significance of invariant Lagrangian graphs and explain how the presence of the KAM torus impacts the convergence speed of the Lax-Oleinik semigroup.
Key words and phrases:
conformally symplectic systems, KAM torus, discounted Hamilton-Jacobi equation, viscosity solution, Lax-Oleinik semigroup, Lagrangian manifolds2010 Mathematics Subject Classification:
Primary 37J39, 37J51, 37J55; Secondary 70H20Liang Jin†
Department of Applied Mathematics, School of Science
Nanjing University of Sciences and Technology, Nanjing 210094, China
Jianlu Zhang‡
Hua Loo-Keng Key Laboratory of Mathematics &
Mathematics Institute, Academy of Mathematics and systems science
Chinese Academy of Sciences, Beijing 100190, China
Kai Zhao∗
School of Mathematical Sciences
Fudan University, Shanghai 200433, China
1. Introduction
The earliest research on conformally symplectic systems can be found in Duffing’s experimental designing book published in 1918, concerning forced oscillations with variable frequency [7]. His work inspires the creation of modern qualitative theory for dynamical systems, and a bunch of interesting phenomena, e.g. chaos, bifurcation, resonance etc [10] were found since then, although contemporaries of Duffing have also noticed these objects, e.g. Poincaré [11] and Lyapunov. Such a kind of systems have a wide practical prospect, which can be found in almost all the modern scientific subjects, e.g. astronomy [5], electromagnetics [19], elastomechanics [18], and even economics [14]. The study of invariant Lagrangian submanifolds for dissipative systems, and in particular the existence of KAM tori (i.e., invariant Lagrangian tori on which the motion is conjugate to a rotation), have been deeply investigated in [2, 3, 16]. Besides, the PDE viewpoint and variational method provide more viewpoints towards the global dynamics [6, 14, 15].
1.1. Conformally symplectic system: Hamiltonian/Lagrangian formalism
For a smooth Hamiltonian function ()
| (1) |
which satisfies
-
(H1)
(Positive Definite) is positive definite everywhere on ;
-
(H2)
(Superlinear) , where is the Euclidean norm on ;
we introduce a dissipative equation by
| (2) |
Here is called the viscous damping index, since the flow of (2) transports the standard symplectic form into a multiple of itself, i.e.
for in the valid domain. That is why system (2) is called conformally symplectic [20] or dissipative [13] in related literatures.
The Hamiltonian satisfying (H1)-(H2) is usually called Tonelli. If (H1)-(H2) is guaranteed, the Legendre transformation
is a diffeomorphism and endows a Tonelli Lagrangian
| (3) |
of which the maximum is obtained at such that . With the help of , we can introduce a variational principle
Due to the Tonelli Theorem and Weierstrass Theorem [17], the infimum is always achievable by a curve connecting and , which satisfies the following Euler-Lagrange equation:
Such an is called a critical curve of . Moreover, the Euler-Lagrange flow satisfies in the valid time region. As an equivalent substitute, we can explore the dynamics of (2) via the variational method.
1.2. Symplectic aspects of the KAM torus
Let be the Liouville form on and
be a Lagrangian graph, i.e. with . That implies the symplectic form vanishes when restricted to the tangent bundle of . If so, there must be a and some such that
| (3) |
Additionally, if is invariant for all , we can prove the following:
Theorem 1 (proved in Sec. 3).
. In other words, any invariant Lagrangian graph has to be exact.
Usually, the existence of such a invariant Lagrangian graph can be guaranteed by certain object with quasi-periodic dynamic in the phase space, i.e. the KAM torus:
Definition 1.1 (KAM torus).
A homologically nontrivial, graphic, invariant set is called a KAM torus and denoted by , if the dynamic on it conjugates to the rotation for some . In other words, we can find a embedding map expressed by
with and for any , such that the following diagram is commutative for all :
| (4) |
Consequently we have
Technically, is called the frequency of .
Remark 1.2.
Although this definition does not rely on the choice of , in most occasions we have to make a special selection of that, to make such a available. Precisely, we call Diophantine, if there exists such that
where . It has been proved in a bunch of papers, e.g., [2, 3, 5, 16], the existence of the KAM torus with a Diophantine frequency for (2), by using an analogy of the classical KAM iterations.
Theorem 2 (proved in Sec. 3).
The KAM torus is naturally a invariant Lagrangian graph.
1.3. Variational aspects of the KAM torus
Following the ideas of Aubry-Mather theory or weak KAM theory in [6, 15], we can define the Lax-Oleinik semigroup operator
by
| (5) |
We can prove that is the viscosity solution (see Definition 2.1) of the Evolutionary discounted Hamilton-Jacobi equation (EdH-J):
| (6) |
and exists uniquely as the viscosity solution of the Stationary discounted Hamilton-Jacobi equation (SdH-J)
| (7) |
no matter which is chosen. By the Comparison Principle, the viscosity solution of (7) is unique but usually not . Therefore, a corollary of Theorem 1 and Theorem 2 can be drawn:
Theorem 3.
Based on this Theorem and the convergence of for any initial , we can perceive that works as an ‘attractor’ to global action minimizing orbits. So we prove the following :
Theorem 4 (convergency).
For a smooth Hamiltonian satisfying (H1)-(H2) and the associated conformally symplectic system (2), if there exists a -graphic KAM torus
with the frequency , then for any function , there exists a constant such that
| (8) |
for all , where for all .
Remark 1.3.
-
•
This conclusion indicates that, the solution of the Cauchy problem (6) converges in exponential speed to the solution of the stationary equation (7) w.r.t. the norm, under the prior existence of a KAM torus . We will see from the proof (in Sec. 4), the semiconcavity of plays a crucial role in the controlling of . However, it remains open to get the convergence speed of the semigroup under norms with higher regularity.
-
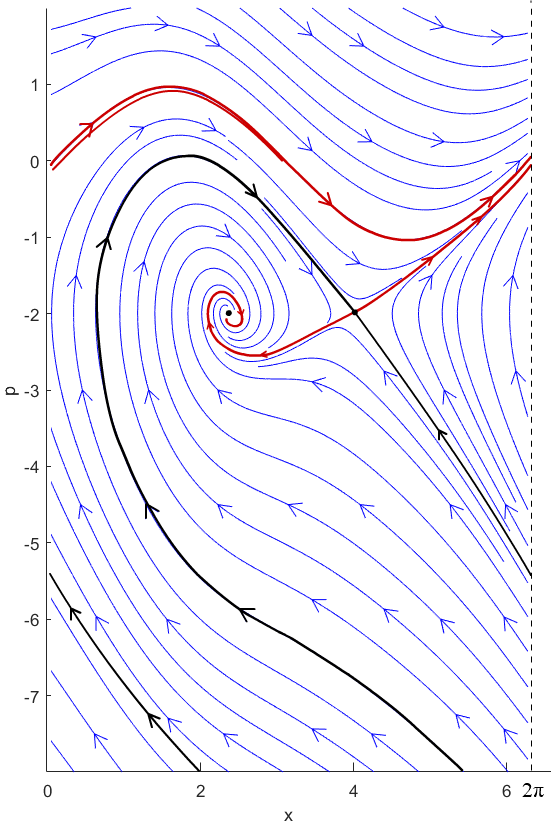
•
We should point out that usually is not a global attractor and extra invariant sets may exist in the phase space (see Fig. 1). Nonetheless, the KAM torus is the only destination of all the variational minimal orbits as , not the extra invariant sets.
1.4. Is the Lagrangian graph variational stable?
Open Problem 1.
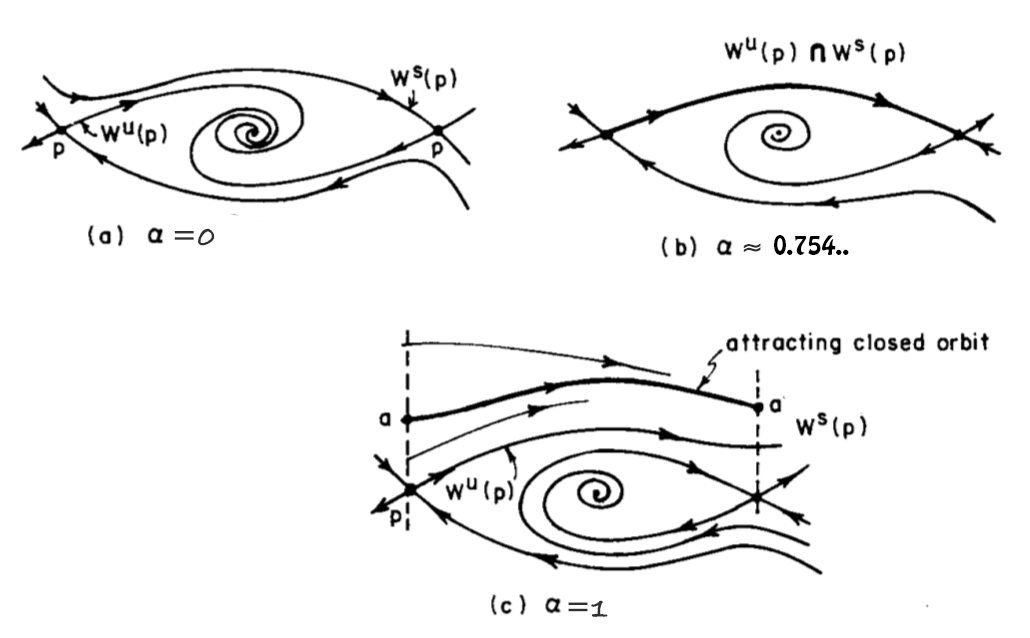
Does an invariant Lagrangian graph of a conformally symplectic system still persists as an invariant Lagrangian graph under small perturbation?
The answer to this question seems negative, as is shown in Fig. 2, the dissipative property of (2) leads to a bifurcation of the global attractor. For equal to the bifurcate value , the Lagrangian graph is a union of homoclinic orbit and a hyperbolic equilibrium (only Lipschitz smooth). If we reduce the value of , the Lagrangian graph disappears and a non-graphic global attractor comes out, as shown in (a) of Fig. 2.
Since the KAM torus is normally hyperbolic, under small perturbation it persists as a invariant graph due to the Invariant Manifold Theorem [12], although the dynamic on the perturbed torus may no longer conjugate to a rotation. That implies the persistence of Lagrangian graphs is possible with prior KAM assumption:
Theorem 5.
(proved in Sec. 5) The KAM torus of a conformally symplectic system keeps to be a Lagrangian graph under small perturbations.
Organization of the article: The paper is organized as follows: In Sec. 2, we give a brief introduction about the the weak KAM theory. In Sec. 3, we prove the symplectic properties of the KAM torus, i.e. Theorem 1 and Theorem 2. In Sec. 4, we discuss the convergence of the Lax-Oleinik semigroup and prove Theorem 4. In Sec. 5 we prove the Lagrangian persistence of the KAM toruus, namely Theorem 5. For the consistency of the proof, some longsome and independent conclusions are moved to the Appendix.
Acknowledgements: Jianlu Zhang is supported by the National Natural Science Foundation of China (Grant No. 11901560). The authors are grateful to Prof. A Sorrentino for checking the proof of exactness of the Lagrangian graphs and giving constructive suggestions.
2. Weak KAM theory of discounted H-J equations
In this section we display a list of definitions and conclusions about the variational principle of system (2), which can be used in later sections.
Definition 2.1 (Viscosity solution).
-
(1)
A function is called a viscosity subsolution (resp. viscosity supersolution) of equation (7), if for every function and every point at which reaches a local maximum (resp. minimum) , we have
-
(2)
A function is called a viscosity solution of equation (7), if it is both a viscosity subsolution and a viscosity supersolution.
-
(3)
Similarly, a function can be defined by the viscosity subsolution, viscosity supersolution or viscosity solution of equation (6), if aforementioned items holds in the interior region for respectively.
Proposition 2.2.
-
(1)
(Variational principle) For each , each and each , we can find a smooth curve ending with such that
Moreover, satisfies (2) for .
-
(2)
(Pre-compactness) for any and any , there exists a constant depending only on and , such that the minimizing curve achieving satisfies for all .
-
(3)
(Viscosity solution) Suppose , then it is a viscosity solution of the EdH-J equation (6).
Proof.
For assertion (1), by taking
| (9) |
we get a simplified expression
Since the function is continuous on , we can find such that . Due to the Tonelli Theorem, the infimum of in (9) is always achievable, and has to be smooth due to the Weierstrass Theorem [17]. Hence, we can find a smooth curve with and such that
For assertion (2), as we know, for any and ,we choose such that , due to item (1), there exists a a smooth curve with and due to is a semigroup operator,
By chosen being the straight line connecting and , we have
for a suitable constant depending only on with . On the other hand, there exists constants such that for all , then
Hence, we have
There always exists a such that . Since satisfies the (E-L), then is uniformly bounded on .
Choose such that , then for any we get
the same scheme as above still works. So is uniformly bounded on .
For assertion (3), it’s a classical conclusion in the Optimal Control Theory (e.g. [1, Chapter III]) that is a continuous viscosity solution of (7). Here we give a sketch:
To prove is a subsolution; for any fixed . Let be a test function such that is a local maximal point of and . That is
| (10) |
with be an open neighborhood of in .
Due to item(1) and is a semigroup operator, for any differentiable point , we have that for any in which implies that
for any curve connecting to . By (10) it follows
By letting , this gives rise to
As an application of Fenchel-Legendre dual, we obtain
which shows that is a subsolution.
Now we turn to the proof that is a supersolution. Let be a test function such that is a local minimal point of and . That is
with be an open neighborhood of in . There exists a curve with such that
Hence
It follows that
which implies
So we finally finish the proof. ∎
Proposition 2.3.
-
(1)
(Expression) [6, Theorem 6.1] For all , the limit of exists and can be explicitly expressed, i.e.
(11) Since the limit is independent of , we can denote it by .
-
(2)
(Domination) [6, Proposition 6.3] For any absolutely continuous curve connecting , we have
(12) - (3)
-
(4)
(Pre-compactness)[6, Proposition 6.2] There exists a constant depending only on , such that the minimizing curve of satisfies , for all .
-
(5)
[15, Proposition 5,6] Along each calibrated curve , we have
-
(6)
(convergent speed) Let be the viscosity solutions of the equation (6), there exists a constant , such that
-
(7)
(Stationary solution) is a viscosity solution of (7).
Proof.
As direct citations, we have marked the exact references for the first five items of this Proposition. For item (6), due to the expression of in (11) and item (3), there must exist an absolutely continuous curve with such that Then we have
where is a constant depending on and . On the other hand, there is an absolutely continuous curve with such that attains the infimum in the formula (5), define by for and for , it follows that is an absolutely continuous curve with and
with being a constant depending on and . Combining previous two inequalities we prove this item.
For item (7), the proof is similar with item (4) of Proposition 2.2. ∎
3. Exactness of the KAM torus
Proof of Theorem 1: The invariance of implies for any ,
Due to (2), for any ,
| (14) | |||||
On the other side, we define
which satisfies
| (15) | |||||
since . We can read through previous equality for ,
By integrating the above equality w.r.t. over , then for .∎
Proof of Theorem 2: It suffices to show that , which is equivalent to show . Recall that
On the other side, , which implies
Combining these two equalities we get
Since is invariant, and , we prove .∎
4. convergence speed of the Lax-Oleinik semigroup
4.1. Semiconcave functions with linear modulus
Definition 4.1 (Hausdorff metric).
Let be a metric space and be the set of non-empty compact subset of . The Hausdorff metric induced by is defined by
Definition 4.2 (SCL).
Let be a open set. A function is said to be semiconcave with linear modulus (SCL for short) if there exists a constant such that
Definition 4.3.
Assume , for any , the closed convex set
is called the super-differential (resp. sub-differential) set of at .
Definition 4.4.
Suppose is local Lipschitz. A vector is called a reachable gradient of at if a sequence exists such that is differentiable at for each , and
The set of all reachable gradients of at is denoted by .
Lemma 4.5.
[4, Theorem.3.1.5(2)] is a SCL, then is a nonempty compact convex set for any .
Theorem 6.
[4, Theorem.3.3.6] Let be a semiconcave function. For any ,
i.e. any element in can be expressed as a convex combination of elements in . As a corollary, ex, i.e. any extremal element of has to be contained in .
Theorem 7.
Theorem 8.
For any (resp. ) and (resp. ),there is a minimal curve (resp. ) satisfying
and
Conversely, for any calibrated curve (resp. ) ending at , the left derivative at (resp. ) exists and satisfies
Proof.
If is differentiable at , by item (3) of Proposition 2.3, there exists a unique calibrated curve ending with , such that is differentiable for any , which implies
| (16) |
Equivalently, solving
| (17) |
for .
If is a non-differentiable point of , then for any , there exists a sequence of differentiable points of converging to , such that . Due to item (5) of Proposition 2.3 we have
and there exists minimizing curves solving (17), such that by letting , we get
Due to the uniqueness of the solution of (17), the limit curve of the sequence of minimizing curves has to be unique as well, with the terminal conditions . This proves that the correspondence
is injective.
4.2. Proof of Theorem 4
Based on aformentioned preparations, we turn to the proof of Theorem 4. Recall that the KAM torus is the graph of (due to Theorem 3), where is the unique classic solution of (7). On the other side, is SCLloc w.r.t. , then has to be a compact convex set. Now we assume , then for any , due to Proposition 8 there is a unique minimizer curve with such that
with . Moreover, the following properties of and can be proved easily:
Lemma 4.6.
-
(1)
For any fixed , we have
where is the standard projection.
-
(2)
There exists a constant depending only on and , such that
-
(3)
There exists a constant such that
(18)
Proof.
Now we define a substitute Lagrangian
| () |
on . Due to item (3) of Proposition 2.3, there exists a calibrated curve , of which
and
Therefore, we have
| (19) |
and
| (20) |
for any curve , due to item (2) of Proposition 2.3.
Lemma 4.7.
Suppose for some , then there exists a constant depending only on such that
| (21) |
where
| (22) |
for any .
Proof.
By the definition of the solution semigroup and item (2) of Proposition 2.2, there exists a curve such that
By integrating function along with over the interval , we obtain
which implies that
| (23) |
where is the same constant as in item (6) of Proposition 2.3. On the other hand, we denote
| () |
which verifies to be nonnegative by the Fenchel Transform. Moreover,
then if and only if . Due to (H1), there exists such that
| (24) |
Recall that and we introduce
for any . Thus
| (25) |
Now from (24), we get
which completes the proof. ∎
Recall that is the unique attractor in its local neighborhood (see Appendix A). There exists a constant such that
can be guaranteed by chosing suitable . Consequently, the following Lemma holds:
Lemma 4.8.
There exists a suitable constant such that
Proof.
For any , we assume that
| () |
for some and . Otherwise, the assertion of this Lemma holds. Due to (18), there exists a constant
such that for any
where is a disk centering at and of a radius which has been given in item (3) of Lemma 4.6. On the other side, there exists such that
and as long as suitably large. This is because
due to (21). Therefore, if we make
then since . Due to (25),
for any possible and such that ( ‣ 4.2) holds. So we complete the proof. ∎
Proof of Theorem 4: For any and with given in Lemma 4.8, there holds
due to Lemma 4.6, where is the Hausdorff distance between any two subsets of . Besides, due to Lemma 4.8, for any and , it obtains that
which implies that lies in the neighborhood of KAM tours , i.e.
| (26) |
Next, we claim that there exists a constant depending only on and , such that
| (27) |
Due to (26),
is always finite. Since is a Lipschitz graph with Lipschitz constant , then
which is a cone clustered at . Therefore,
| (28) |
On the other side, Proposition A.1 implies is normally hyperbolic with the Lyapunov exponent . There exists constants depending only on and , such that
| (29) |
Benefiting from (29), we conclude
Consequently,
| (30) |
For any and defined as in (22), we have the following estimate:
| (31) |
with
Due to (H1) and item (2) of Proposition 2.2, is uniformly positive definite for , namely for some constant . The second and third inequality of (31) is due to (29) and (28) respectively. Taking (31) into (21) we get
| (32) |
Taking account of (30), previous (32) implies the existence of a constant (depending only on , and ) such that
so our claim (27) get proved. Finally,
where is given by item (6) of Proposition 2.3. By taking we get the main conclusion of Theorem 4.∎
5. Persistence of KAM torus as invariant Lagrangian graph
This section is devoted to prove Theorem 5. Firstly, the following notions and conclusions are needed:
Definition 5.1 (Aubry Set).
is called globally calibrated by , if for any ,
The Aubry set is an invariant set defined by
and the projected Aubry set can be defined by , where is the standard projection.
Proposition 5.2.
[15] is a Lipschitz graph.
Proposition 5.3 (Upper semicontinuity).
As a set-valued function defined on ,
is upper semicontinuous.
Proof.
It suffices to prove that for any accumulating to w.r.t. the norm as , any accumulating curve of would be contained in .
Due to item (5) of Proposition 2.3, for any converging to w.r.t. the norm, is uniformly compact in the phase space. Therefore, for any sequence globally calibrated by , any accumulating curve has to satisfy
for any . On the other side, for any satisfying and , we can find ending with and for some sequence with for all ,
and uniformly on as . Since for all , then
Combining these conclusions we get
which indicates minimizes for any . So . ∎
Proof of Theorem 5: Suppose is a KAM torus of (2) associated with (no constraint on the frequency). Due to the Invariant Manifold Theorem [12], for system
the perturbed invariant graph is still normally hyperbolic, as long as the constant is sufficiently small.
Recall that (see Definition 5.1 for ). Due to the upper semi-continuity of the Aubry set (see Lemma 5.3), the Hausdorff distance between and can be sufficiently small as long as , which implies (but may not be equal).
Suppose is the unique viscosity solution of (7) for system , then it’s differentiable a.e. . For any differentiable point , decides a unique backward orbits which tends to as (shown in Proposition 2.3), so . Then coincides with for a.e. . Since is graphic and at least smooth, then is actually a classic solution of (7) for system and then , which implies is exact, therefore has to be Lagrangian.∎
Appendix A Normal hyperbolicity of the KAM torus for CSTMs
In this Appendix, we show the normal hyperbolicity of the KAM torus for conformally symplectic system (2). This conclusion was firstly proved in [2, 3]. Nonetheless, we reprove it here for the consistency.
Proposition A.1 (local attractor[2, 3]).
The KAM torus is a normally hyperbolic -invariant manifold, consequently, there exists a suitable neighborhood of it such that is the limit set of any point .
Proof.
Since the KAM torus is -invariant, so we just need to prove its normal hyperbolicity w.r.t. . The generalization from to is straightforward. Due to (4), we know , which implies
Therefore, is an eigenvector of of the eigenvalue . As is a Lagrangian graph, i.e.
so we have
Formally for the matrix
with , we have
where
and
This is because the conformally symplectic condition implies
Defining by a matrix which is juxtaposed with and , i.e.
we will see
Recall that
is a invariant subbundle of , with the eigenvalue . To find the other invariant subbundle, we assume there exists a matrix such that
is invariant, then
where
has to be diagonal. That imposes
We can always find a suitable solving this equation, since there is no small divisor problem and the regularity of keeps the same with . So is indeed a invariant subbundle with the eigenvalue .
References
- [1] Martino Bardi and Italo Capuzzo-Dolcetta. Optimal Control and Viscosity Solutions of Hamilton-Jacobi-Bellman Equations. 1997. doi:10.1007/978-0-8176-4755-1.
- [2] Renato Calleja, Alessandra Celletti, Rafael De, and Rafael De la Llave. Local behavior near quasi-periodic solutions of conformally symplectic systems. Journal of Dynamics and Differential Equations, 25, 09 2013. doi:10.1007/s10884-013-9319-0.
- [3] Renato Calleja, Alessandra Celletti, and Rafael De la Llave. A kam theory for conformally symplectic systems: Efficient algorithms and their validation. Journal of Differential Equations, 5(255):978–1049, 2013. doi:10.1016/j.jde.2013.05.001.
- [4] Piermarco Cannarsa and Carlo Sinestrari. Semiconcave functions, Hamilton-Jacobi equations, and optimal control, volume 58 of Progress in Nonlinear Differential Equations and their Applications. Birkhäuser Boston, Inc., Boston, MA, 2004.
- [5] Alessandra Celletti and Luigi Chierchia. Quasi-periodic attractors in celestial mechanics. Archive for Rational Mechanics and Analysis, 191:311–345, 2009. doi:10.1007/s00205-008-0141-5.
- [6] Andrea Davini, Albert Fathi, Renato Iturriaga, and Maxime Zavidovique. Convergence of the solutions of the discounted Hamilton-Jacobi equation: convergence of the discounted solutions. Invent. Math., 206(1):29–55, 2016. URL: https://doi.org/10.1007/s00222-016-0648-6.
- [7] G. Duffing. Erzwungene Schwingungen bei Veränderlicher Eigenfrequenz und ihre Technische Bedeutung, volume 134. 1918.
- [8] Neil Fenichel. Asymptotic stability with rate conditions for dynamical systems. Bulletin of The American Mathematical Society - BULL AMER MATH SOC, 80, 04 1974. doi:10.1090/S0002-9904-1974-13498-1.
- [9] Neil Fenichel. Asymptotic stability with rate conditions ii. Indiana University Mathematics Journal, 26, 1977. doi:10.1512/iumj.1977.26.26006.
- [10] John Guckenheimer, John, Emily Holmes, and Philip. Nonlinear Oscillations, Dynamical Systems, and Bifurcations of Vector Fields, volume 38. Springer Verlag, New York, 1983.
- [11] Poincaré H. Les méthodes nouvelles de la mécanique céleste. Paris, esp. Sec., 2, 1893.
- [12] M. W. Hirsch, C. C. Pugh, and M. Shub. Invariant manifolds. Bull. Amer. Math. Soc., (76):1015–1019, 1970.
- [13] Patrice Le Calvez. Propriétés des attracteurs de birkhoff. Ergodic Theory and Dynamical Systems, 8, 1988. doi:10.1017/S0143385700004442.
- [14] P Lions. Generalized solutions of Hamilton-Jacobi equations, volume 69. 1982.
- [15] Stefano Marò and Alfonso Sorrentino. Aubry-mather theory for conformally symplectic systems. Communications in Mathematical Physics, 354:775–808, 2017. doi:10.1007/s00220-017-2900-3.
- [16] Jessica Elisa Massetti. Normal forms for perturbations of systems possessing a diophantine invariant torus. Ergodic Theory and Dynamical Systems, pages 1–47, 12 2017. doi:10.1017/etds.2017.116.
- [17] John N. Mather. Action minimizing invariant measures for positive definite Lagrangian systems. Math. Z., 207(2):169–207, 1991. URL: https://doi.org/10.1007/BF02571383.
- [18] F. Moon and P. Holmes. A magnetoelastic strange attractor. Journal of Sound and Vibration, 65:275–296, 1979. doi:10.1016/0022-460X(79)90520-0.
- [19] Martienssen V.O. Über das Fundamentaltheorem in der Theorie der gewöhnlichen Differentialgleichungenuber neue, resonanzerscheinungen in wechselstromkreisen. Physik Zeitschrift-Leipz, 11:448–460, 1910.
- [20] Maciej Wojtkowski and Carlangelo Liverani. Conformally symplectic dynamics and symmetry of the lyapunov spectrum. Communications in Mathematical Physics, 194(1):47–70, 1997. doi:10.1007/s002200050347.