Weak turbulence in two-dimensional magnetohydrodynamics
Abstract
A weak wave turbulence theory is developed for two-dimensional (2D) magnetohydrodynamics (MHD). We derive and analyze the kinetic equation describing the three-wave interactions of pseudo-Alfvén waves. Our analysis is greatly helped by the fortunate fact that in 2D the wave-kinetic equation is integrable. In contrast with the 3D case, in 2D the wave interactions are nonlocal. Another distinct feature is that strong derivatives of spectra tend to appear in the region of small parallel (i.e. along the uniform magnetic field direction) wavenumbers leading to a breakdown of the weak turbulence description in this region. We develop a qualitative theory beyond weak turbulence describing subsequent evolution and formation of a steady state.
- PACS numbers
-
E, -d, Cv, Bj, Qd.
pacs:
Valid PACS appear hereI Introduction
Magneto-Hydro-Dynamics (MHD) is of great interest for modeling turbulence in magnetically confined and unconfined plasmas. In astrophysics its applications range from solar wind Marsch and Tu (1994), to the Sun Priest , to the interstellar medium Ng et al. (2003) and beyond Zweibel and Heiles (1997). At the same time, MHD is also relevant to large-scale motion in nuclear fusion devices such as tokamaks Strauss (1976). One of the pioneering results of incompressible MHD turbulence has been obtained by Iroshnikov Iroshnikov (1963) and Kraichnan Kraichnan (1965) (thereafter IK) who proposed an extension of the Kolmogorov phenomenology Kolmogorov (1941), originally derived for Navier-Stokes equations for Hydro-Dynamics (HD). For simplicity the assumptions of homogeneity and isotropy were made by Kolmogorov, and the energy cascade was supposed to be dominated by local (in scale) interactions between eddies of similar size. Then the Kolmogorov phenomenology leads to the well-known one-dimensional kinetic energy spectrum , where is the wave vector. The associated cascade properties for its inviscid invariants differ for 3D and 2D turbulence: while in 3D the energy and the kinetic helicity exhibit direct cascades, in 2D the energy cascades inversely – still with a scaling – whereas a direct cascade is found for the enstrophy which leads to spectrum at the small scales.
IK modified the Kolmogorov phenomenology by taking into account the magnetic field. They also assumed turbulence homogeneity, isotropy and locality of interactions. However, there exist fundamental differences between the Kolmogorov and the IK theories. First of all, in MHD the energy cascade is supposed to be dominated not by the interactions between eddies but between Alfvén wave packets propagating in opposite directions; this modification leads to the energy spectrum . Furthermore, unlike hydrodynamics the cascades of the ideal MHD invariants exhibit some similarities in their behaviour in 2D and 3D Biskamp (2003): in both cases, the cascades have the same direction with a direct cascade for the energy and cross-helicity, and an inverse cascade for the magnetic helicity or the anastrophy.
The differences between MHD and HD turbulence go beyond these classical properties. In the IK theory the large-scale magnetic field is supposed to play the role of external field which is necessary for the existence of Alfvén waves but its main effect, i.e. anisotropy, is not taken into account. The importance of an external magnetic field has been discussed many times during the last two decades Montgomery and Turner (1981); Shebalin et al. (1983); Oughton et al. (1994); Ng and Bhattacharjee (1997); Bigot et al. (2008a); Verma (2004); Chandran (2005); Boldyrev (2006); Bigot and Galtier (2011) and the anisotropic behavior has been shown in direct numerical simulations for both 2D Shebalin et al. (1983) and 3D Oughton et al. (1994).
Despite some similarities – like the cascade directions – the question about the identification of differences between 2D and 3D MHD turbulence still represents an important issue. In early numerical studies Shebalin et al. (1983) mainly 2D simulations were performed because of the limited numerical resources available and the non-accessibility of 3D calculations at high Reynolds numbers. Nowadays, 3D MHD numerical simulations are commonly achieved Politano et al. (1998); Gomez et al. (1999); Biskamp and Mueller (2000); Haugen et al. (2004); Biskamp and Shwartz (2001); Biskamp and Mueller (2000); Merrifield et al. (2007, 2006); Bigot et al. (2008b). At the same time, 2D simulations are still used for the illustration of new numerical techniques Dritchel and Tobias (2012). There is also an interest for the investigation of freely decaying MHD turbulence because the Reynolds numbers can be higher in 2D than in 3D Biskamp and Shwartz (2001). When the magnetic field perturbations are small compare to a uniform background magnetic field, the 2D MHD equations are sometimes used to model turbulence. Such a situation is particularly relevant for solar coronal loops as well as for reduced models for fusion plasmas in slab geometry Strauss (1976).
Strong statements were made by some authors that 2D simulations can be safely used to model 3D situations because the properties of the 2D and the 3D MHD turbulence are essentially the same Biskamp and Shwartz (2001); Biskamp (1993). One of the motivations of the present paper is to test validity of this claim in a special case when the external magnetic field is strong.
In this paper, we consider 2D MHD in the presence of a strong background magnetic field which implies realization of the weak turbulence regime. One of the main advantages of this regime is the fact that it allows one to derive accurate analytical results for the spectrum. An explicit comparison will be made between the weak turbulence regimes in 2D and in 3D; the latter was analyzed rigorously in Galtier et al. (2000). The weak wave turbulence approach is widely familiar to the plasma physics community Achterberg (1979); Akhiezer et al. (1975); McIvor (1974); Zakharov (1974, 1984); Zakharov et al. (1992); Kuznetsov (1972a, b, b); Tsytovich (1970); Sagdeev and Galeev (1969); Vedenov (1968); Galtier et al. (2001); Galtier and Nazarenko (2008). It is a statistical description of a large ensemble of weakly interacting dispersive waves. The formalism leads to wave kinetic equations from which exact power law solutions can be found for the energy spectra. There were several reasons which postponed development of weak turbulence for Alfvén waves. The first one is their semi-dispersive nature. Typically, the wave-kinetic approach cannot be used for non-dispersive waves since such wavepackets propagate with the same group velocity even if their wavenumbers are different, the energy exchange between such waves may not be considered small, and may lead to possible energy accumulation over a long time of interaction. The Alfvén waves represent a unique exception to this rule because co-propagating waves do not interact and the nonlinear interaction is present only for counter-propagating waves. The latter pass through each other in some finite time and no long time cumulative effect occur. That is why the Alfvén waves represent a unique example of semi-dispersive waves for which the wave turbulence theory applies. The second reason which renders the weak turbulence theory for Alfvén waves very subtle is the fact that the domination of three-wave interactions – as assumed by IK – may be questionable. While in Shridar and Goldreich (1994) the three-wave interactions were declared absent, the IK argument has been re-established in Galtier et al. (2000); Ng and Bhattacharjee (1997); Montgomery and Matthaeus (1995). The weak turbulence theory for 3D incompressible MHD was developed in Galtier et al. (2000) (see also Galtier et al. (2002); Nazarenko (2011)) where three-wave kinetic equations were derived with their exact solutions via a systematic asymptotic expansion in powers of small nonlinearities.
The main goal of the present paper is to derive the weak turbulence equation for the 2D MHD, analyze it and make a comparison with the 3D case. The crucial technical step which allows a comprehensive theoretical analysis of the solutions consists in transforming the wave kinetic equation into an integrable form by Fourier transforming it and separating the transverse and the parallel dynamics by using a self-similar “effective time” variable.
This article is organized as follows. In section II we derive the weak turbulence kinetic equation through a general perturbative procedure. In sections III and IV we proceed with a detailed investigation of its properties in an anisotropic limit. The main goal of such a study is to verify whether or not the turbulence is local. First of all, we will consider the steady state behavior by looking for Kolmogorov-Zakharov type solutions and check their locality. Next, we will proceed with investigation of an unsteady spectrum evolution by considering two different cases with a gaussian-shaped source and different kinds of dissipation: a uniform friction and a viscosity. Due to integrability of the weak wave-kinetic equation in the first case it is possible to find an exact solution. In the second case, a qualitative analysis for the steady state is complemented by a numerical simulation of the spectrum evolution. The goal of section V is to develop some qualitative reasoning about the turbulent behavior of our system near the applicability margin of wave-kinetic formalism and beyond. Formation of steady state is also discussed. Finally, we present a summary of our results in section VI.
II Wave-kinetic description
II.1 Alfvén waves
In 3D incompressible MHD there exist two different kinds of Alfvén waves Verma (2004). The first kind, called Shear-Alfvén waves (SAW), have fluctuations of velocity and magnetic field transverse to the initial background magnetic field , whilst the other kind, called Pseudo-Alfvén waves (PAW), have fluctuations along . Both waves propagate along at the same Alfvén speed.
The weak wave turbulence approach for incompressible MHD applies for a small nonlinearity, , were is the perpendicular magnetic field perturbation and and are the wave vector components in the parallel and the perpendicular directions to . Additionally, a strong anisotropy condition is often used, . In the 3D case, it was shown that in the leading order of weak nonlinearity, , and strong anisotropy, , the SAW interact only among themselves and evolve independently from the PAW. At the same time, the PAW scatter from the SAW without amplification or damping, and they do not interact with each other. Such a behaviour does not rule out a possibility for the PAW to be interacting among themselves in the next order of expansion in . However in the 3D case, such a process is sub-dominant to a stronger interaction with the SAW and was not considered yet.
In the 2D case, due to the geometrical restrictions, it is only possible to have the PAW and not SAW. In this paper we will see that three-wave interactions of PAW do occur in the 2D case in the next order of expansion in and represent the dominant process in the nonlinear evolution.
II.2 Interaction representation.
The ideal incompressible MHD system in Elsässer variables , with , is given by Biskamp (1993)
| (1) | |||||
| (2) |
where is the fluid velocity, is the magnetic field fluctuation (in velocity units), is a uniform background magnetic field (also in velocity units, i.e. the Alfvén speed) and is the total (thermal plus magnetic) pressure. In what follows we suppose that the background magnetic field is directed along the axis, . In the coordinate notations we have
| (3) | |||
| (4) |
The nonlinear terms in eq.(3) include Elsässer variables of the opposite signs only. Therefore, the nonlinear interactions take place only between counter-propagating waves.
The first step in the general procedure of the wave kinetic formalism is to identify the linear modes. Neglecting the nonlinear terms in the right hand side (r.h.s.) of the equation (3) (which includes the pressure term) and looking for solutions in the form of a wave,
| (5) |
we get two linear modes,
| (6) |
which propagate parallel to the background magnetic field (in both directions) with group velocity . Let us suppose that our system is periodic in the physical space with period in both and , and let us introduce the Fourier series:
| (7) |
where wave vector takes values on a 2D grid, where . Then, by applying the divergence operation on both sides of the equation (3) and by using (4), we find the expression for the Fourier coefficients of pressure :
| (8) |
where is the Kronecker delta: for and zero otherwise. Thus, equation (3) in Fourier space becomes:
| (9) |
Using the incompressibility condition
| (10) |
we reduce (9) to one scalar equation,
| (11) |
Let us now introduce the representation of interaction variables,
| (12) |
which represent slowly varying wave amplitudes. Factor here compensates for the fast-scale oscillations arising due to the linear dynamics. We have introduced a formal constant small parameter for easier counting of the powers of nonlinearity, assuming now that . Then the system (9) in the interaction representation variables is:
| (13) |
with the interaction coefficient:
| (14) |
Note that so far we have not used smallness of and the eq.(13) is completely equivalent to the initial system (3)-(4).
II.3 Wave-kinetic equation
The standard weak turbulence approach Zakharov et al. (1992); Nazarenko (2011) exploits the smallness of nonlinearity, randomness of phases and the infinite box limit. In Appendix A, we are applying this approach to the system (13) and obtain the following kinetic equation for the wave spectrum ,
| (15) |
where the interaction coefficient is as in expression (14). Here, means Dirac’s delta function. In the following sections we proceed with detailed analysis of this equation.
II.4 Anisotropic limit
One remarkable property of MHD turbulence, which makes it very different from the HD one, is its strong anisotropy in presence of strong background magnetic field. It was illustrated with direct numerical simulations in both 2D Shebalin et al. (1983) and 3D Oughton et al. (1994). The wave-kinetic formalism confirms such an anisotropy through the kinetic equation structure. In fact for Alfvén waves, the resonant three-wave interaction Shebalin et al. (1983) is organised in such a way that one member of each triad must have its wave vector perpendicular to the external magnetic field. At the same time, the two other waves in the same triad must have their parallel wavenumbers equal to each other: . Formally, this is seen in both the 2D and the 3D kinetic equations whose r.h.s. contains a delta function , see equation (15) for the 2D case and the equation (26) in Galtier et al. (2000) for the 3D case. Using this delta function and integrating over we see that the parallel component of the wavenumber enters into the kinetic equation as an external parameter and the spectrum dynamics is decoupled at each level of . In other words, there is no energy transfer in the parallel (to the external field ) direction in the -space. The initial spectrum is spreading over the transverse wavenumbers , and not in the direction. For large time, such a spectrum becomes very flat, pancake-like.
The two-dimensionalisation of the total energy means that, for large time, the energy spectrum is supported on a volume of wave-numbers such that for most of them .
Thus, let us consider the anisotropic limit for kinetic equation (15), which reads in 2D as . Taking into the account the resonant interaction conditions for the parallel wavenumbers, we will have a considerable simplification of the interaction coefficient:
| (16) |
and the kinetic equation will take the following form,
| (17) |
This equation describes three-wave interactions of PAW in 2D in the anisotropic limit. One can immediately see that the energy is conserved separately in the ”+” and ”-” waves separately at each :
| (18) |
Factor in the r.h.s. of relation (17) is very important. In the 3D case, there exists a similar term which corresponds to a sub-leading contribution. We remind that in 3D in the leading order of the perturbation theory, the PAW are scattered on SAW and do not interact directly to each other. In the 2D, there is no SAW and, therefore, the r.h.s. of (17) becomes the leading order contribution.
Further, in leading order of 3D there is no factor, and substitution leads to an equation for which does not involve . In 2D, one can also obtain an equation which does not involve but for this, one has to introduce an “effective time” variable :
| (19) |
Now we can seek solution in the following form,
| (20) |
where represents the parallel (non-evolving) component of the energy spectrum and is the perpendicular one. Without loss of generality we can assume . Substituting (20) into (19) we have the following equation for ,
| (21) |
Thus, like in 3D, we have an evolution equation for the perpendicular part of the spectrum which does not explicitly depend on the parallel part. However, the qualitative difference with the 2D case is that there is an implicit dependence on via the effective time variable , which in particular leads to the fact that in the r.h.s. of equation (21) one of ’s is taken at , making this equation linear and, as we will soon see, integrable. Another distinct feature arising from such an implicit dependence on via is sharpening of the spectrum at small leading to the breakdown of the wave-kinetic description. Later in this paper we will study this effect and its consequences.
III Kolmogorov-Zakharov spectra and their locality
At the first step of our investigation of the wave-kinetic equation (21), we seek exact stationary power law solutions, . For this, we will use so-called Zakharov transformation,
| (22) |
We split the integral into the r.h.s. of (21) in two equal parts and we perform the Zakharov transformation in the integrand of one of these parts. This leads to the following conditions on the exponents,
| (23) |
However, the resulting power law spectra represent true mathematical solutions if and only if the original (before the transformation) integral in the r.h.s. of (21) converges at these solutions. In Appendix B, we perform such a convergence study and show that this integral never converges and therefore, no Kolmogorov-Zakharov solutions are possible for 2D MHD system, contrary to the 3D case. We remark that the balanced turbulence spectrum with has a logarithmic divergence. Thus, one could anticipate that such a marginal nonlocality could be “fixed” by logarithmic corrections. We will see later that this is false.
IV Integration of the kinetic equation
A remarkable property of the kinetic equation (19) is its simplicity. In this section we show that in some physical situations it can be solved analytically. Let us introduce into the equation (19) sources and sinks of waves:
| (24) |
The function may represent forcing or dissipation, depending on the choice of the sign before it, and the constant introduces a uniform friction.
In order to use factorisation (20) and eliminate in both sides of the forced kinetic equation, we assume the following type of force/dissipation function, . Then the parallel component of (20) must be chosen as . Finally, we obtain the following forced/dissipated kinetic equation for the perpendicular component of the energy spectrum,
| (25) |
IV.1 Pseudo-physical space
A considerable simplification of equation (25) can be obtained with performing the inverse Fourier transform on :
| (26) |
We will call the pseudo-physical space energy, keeping in mind that what is transformed is the spectrum and not the original wave variable.
We arrive at the following representation of equation (25) in the pseudo-physical space,
| (27) |
IV.2 General solutions
Let us consider the balanced turbulence case with . Then, the general solution of equation (27) can be written as:
| (28) |
where the first term represents the general solution for the homogeneous equation and the second term is a particular (time independent) solution of the inhomogeneous equation. Function has to be fixed by the initial condition,
| (29) |
Now let us consider two particular examples of the forcing and dissipation. In both cases we will assume a Gaussian shape forcing, , where constants and represent the forcing strength and its characteristic wave vector respectively (in the -space the forcing is also Gaussian, centered at and with width ). In the first example, the dissipation will be represented by a uniform friction. Here, we can write analytical solutions of the kinetic equation on the pseudo-physical space. In the second case, we will consider a viscous dissipation. Here, a qualitative analysis of the stationary regime can be done. In order to illustrate the spectrum evolution in that case, a numerical solution will be used.
IV.2.1 Uniform friction.
For the uniform friction case we have:
| (30) |
For simplicity, let us use a single-wave initial condition
| (31) |
which corresponds to two -functions in -space: at .
Then, we can find a function using equation (29) and substitute it into our solution, which yields:
| (32) |
Let us examine the steady state, which corresponds to the limit and, therefore, . Note, however, that the time for the steady state to form becomes longer as gets less, and there are always very small where the spectrum is evolving at any large time. In the limit the solution is given by the second term in the r.h.s. of (32). Far from the initial and the forcing scales, at and , which corresponds to and , we have and . Thus for this range of scales we have the following expression for the steady state solution in the pseudo-Fourier space,
| (33) |
Performing Fourier transform of we get the steady spectrum,
| (34) |
For wavenumbers in the inertial range , expression (33) becomes effectively a delta function in the integrand of (34),
| (35) |
and we have
| (36) |
Therefore we can reach the conclusion that in the equilibrium state the energy spectrum of our system in the inertial range is flat. Formally, it is a power law with exponent which is very different from the Kolmogorov-Zakharov exponent found in section III. Recall that the Kolmogorov-Zakharov in the balanced case was found to be marginally nonlocal and the common wisdom would suggest that it could be fixed by a log correction. As we now see this is false: our exact solution has a completely different exponent and has no log factor.
We also see that our exact solution is nonlocal: it does not just depend on the energy flux but it contains information about both the sources and the sinks as well as about the initial conditions.
IV.2.2 Viscous friction.
Let us now replace the uniform friction by a viscous dissipation keeping the same one-wave initial condition as before. Equation (27) becomes:
| (37) |
where denotes now the viscosity coefficient and we have used the initial conditions (31).
To realise this estimation, we need first to get the expression for the steady state solution. Let us examine the steady state concentrating, like before in the uniform friction case, on the scales less than the forcing and the initial scales, which in terms of the pseudo-physical space variables means and . Performing the same type of expansion in small as before, we have
| (38) |
By performing the following rescaling
| (39) |
we obtain
| (40) |
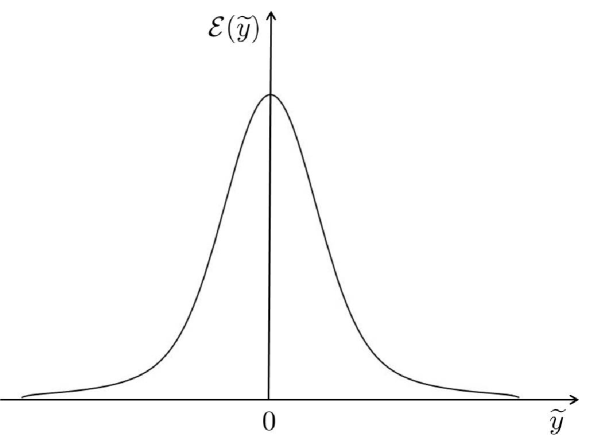
The homogeneous part here is the equation of the parabolic cylinder. Its solutions are the parabolic cylinder special functions, whose properties and asymptotics can be found e.g. in Abramowitz and Stegun (1965). Qualitatively, the behaviour is similar to the one we had in the previous (friction dissipation) example: it has a maximum at and it decays for (faster than in the previous example). In fig. (1) we present such a solution in the pseudo-physical space obtained using Matlab in the interval with . In order to obtain the decaying solution we need to take with high accuracy (to eliminate contribution of the growing parabolic cylinder function).
Respectively, in the -space we again have a flat spectrum in the inertial range,
| (41) |
where is an order one constant. Once again we see that the spectrum is nonlocal (i.e. it is dependent on the details of the forcing and the sink parameters rather than just the energy flux), and its exponent is zero (i.e. it is not a log corrected Kolmogorov-Zakharov spectrum).
In order to illustrate the dynamical evolution of the spectrum in the viscous dissipation case, we perform direct numerical simulations for the kinetic equation (25) in the -space. In this equation we take and with . The result is presented in Fig. (2).
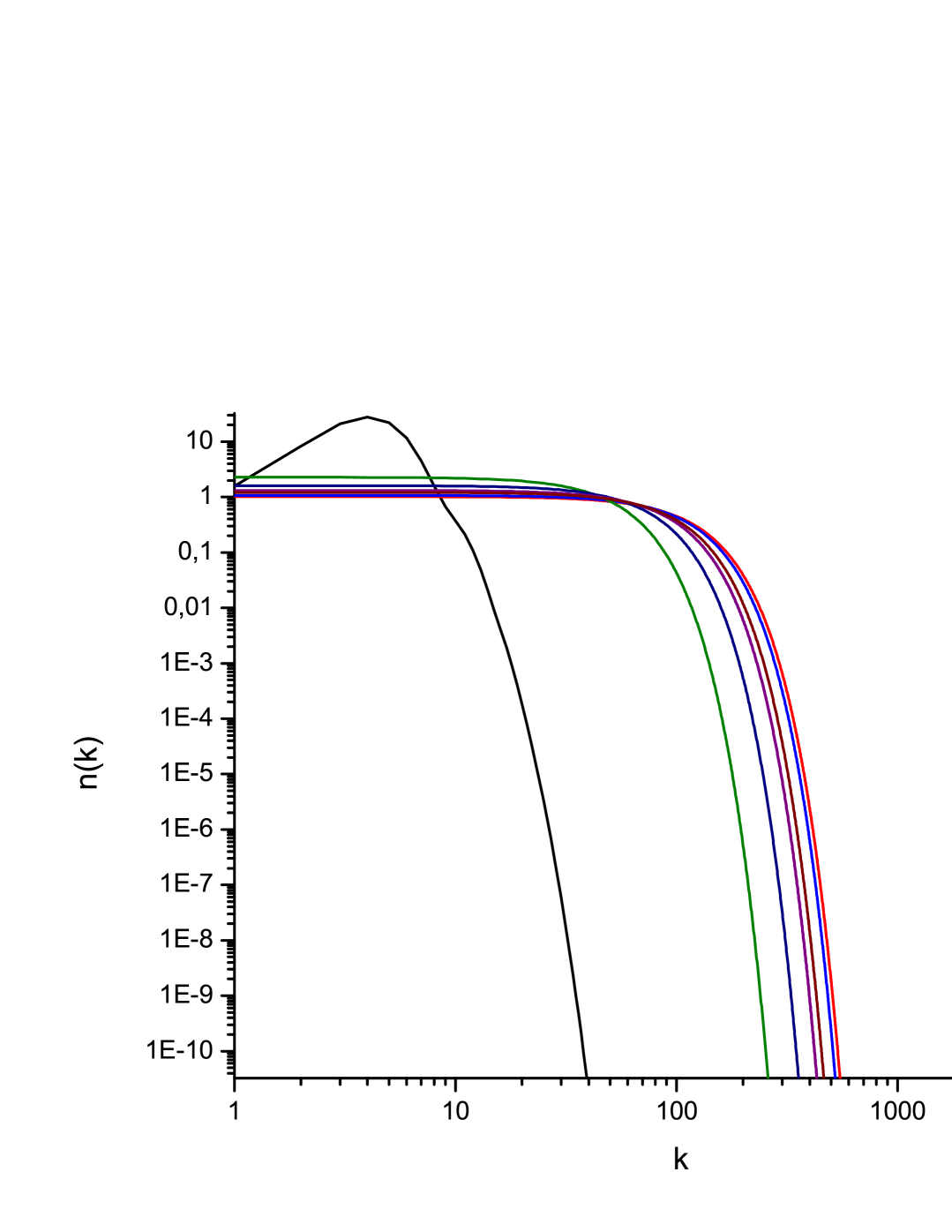
The black curve on this figure represents the initial spectrum with a Gaussian shape with a large-scale forcing realised for . We see that the system converges toward a steady state with a flat spectrum in the inertial range.
V Beyond weak turbulence.
In this section we are providing, at a qualitative level of rigor, a description for the energy spectrum behaviour beyond the weak turbulence regime at the late stage of the evolution. For the wave-kinetic equation to be valid the nonlinearity has to remain weak, i.e. the nonlinear time scale should be much longer than the linear wave period. This results in the following condition,
| (42) |
Here we have used the estimate for the nonlinear evolution time taking the standard hydrodynamic non-linear time scale. In our dynamical equations, the nonlinearity related to the magnetic field is of the same order. Finally, the applicability condition can be rewritten as a limitation for the parallel wave number:
| (43) |
It means that for small values of parallel wave vector component near the kinetic equation becomes invalid. The question about applicability of the wave-kinetic equation near has been frequently discussed in the literature, eg. in the 3D MHD turbulence context Galtier et al. (2000). In particular it was speculated in Galtier et al. (2000) that a sufficient spectrum smoothness for wavenumbers near must be present for the wave-kinetic equation to be applicable. In the 2D case, the smoothness of spectrum near is asymptotically (in time) broken due to a special structure of the kinetic equation.
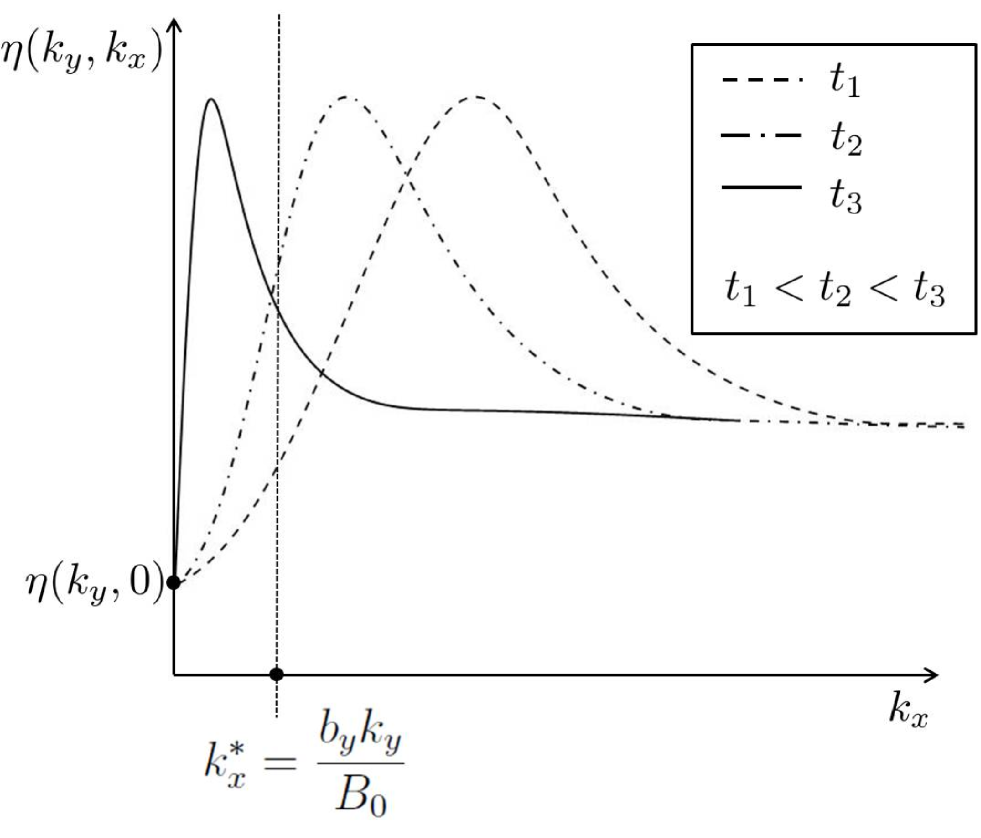
Indeed, as we mentioned before, the wave-kinetic equation for the 2D MHD system is formulated in terms of a self-similar ”time” variable . Therefore dependence on the parallel wavenumber is still present in the perpendicular part of the energy spectrum in an implicit way, via . Such a self-similar dependence on is manifested, at each fixed , in shrinking of the original profile along the -axis as time grows (see Fig. 3). The spectrum is narrowing and its derivative is growing near small values of , and when it is so steep that a significant variation occurs over the range , the kinetic equation breaks down. Time estimate for such a breakdown is .
Therefore, the weak turbulence description will break down at the late evolution stages, and the wave-kinetic equation will no longer work. However, it is possible to amend this description to take into account the strongly nonlinear effects and develop a qualitative theory of subsequent evolution leading to a steady state. Below we will present a qualitative argument which will allow us to obtain such a theory.
First of all we note that the three-wave interaction is never exactly resonant: it involves all the quasi-resonant within a certain small distance from the exact resonant frequency – so called nonlinear resonance broadening . In the other words, the delta function in kinetic equation should be replaced by a peaked function with a small but finite width . For sufficiently smooth spectra the difference from the delta-function can be ignored, but for sharp and narrow spectra the integrand in the kinetic equation’s integral become itself peaked and the delta-function broadening becomes important. Its main effect is that of a filter in the variable which acts to smoothen any sharp changes over the range . The energy is no longer conserved separately at each fixed .
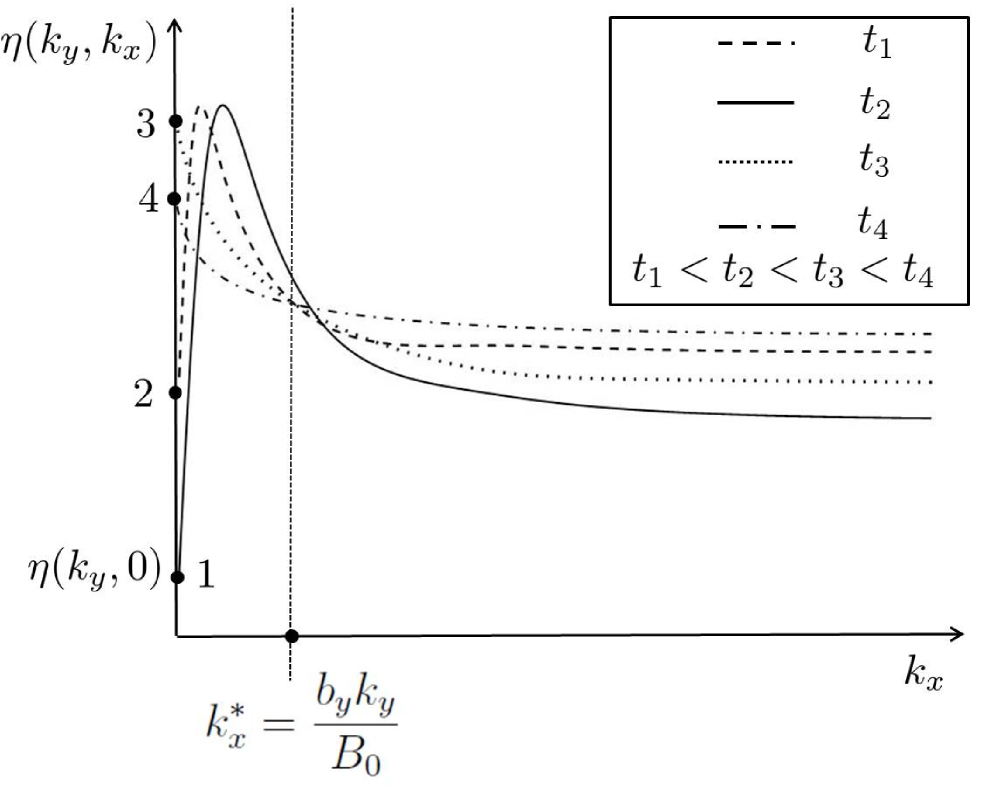
For large wavenumbers (where the spectrum remains slowly varying even when it is steep at ) the kinetic equation could be easily amended by replacing with . For small wavenumbers, , the effect of the resonance broadening is not reduced to such a simple modification of just one function in the integral. It is clear that the spectrum at , which was fixed in the wave-kinetic approximation, will suffer changes caused by the smoothing in the direction determined by spectral slope at small : if the gradient is positive (negative) the value will increase (decrease), as illustrated in Fig. 4. The details of the evolution at the small wavenumbers are not important because the combined action of the self-similar shrinking and smoothing will lead to a very rapid wipeout of all the gradients in and formation of a steady state with independent of . Correspondingly, the values of at will adjust themselves to the values at . After this moment, when the rapid dependencies on disappear, the kinetic equation in its usual weak turbulence form is valid once again, and it can be used for finding the final steady state spectrum. Since is now independent of , the steady state could be readily obtained from the formal condition which simply means our solution independent of ; it has nothing to do with the initial/final values of the spectrum in time or .
Thus, the evolution can be summarized as follows. At the early stage, , the evolution is described by the three-wave kinetic equation. Then at the advanced stage, with characteristic times scales , the kinetic equation is broken down by its own evolution. Smoothing of strong gradients in occurs, which results in spectrum stabilisation and re-emergence of the kinetic equation description at the large time scales . This kinetic equation describes spectrum evolution within the steady state regime. Let us now consider the properties of such a steady state.
V.1 Spectrum evolution in the steady-state
Let us now analyse the steady state. Based on what was said in the end of the previous section, we will seek a -independent solution of the pseudo-Fourier space equation (27):
| (44) |
(formally coinciding with the condition ). Considering this equation at we have . Also we have (because ). Solving the quadratic equation, we have:
| (45) |
To satisfy condition , we must choose “+” if and “-” otherwise.
We suppose that the forcing decays at infinity, , which is the case eg. for the Gaussian forcing. This means that we do not force the mode. Then we see that if and if . In the second case we have a spectrum with a delta function at . Thus we observe an interesting phenomenon of condensation into mode in the cases when the forcing prevails over the dissipation at the small scales (corresponding to high ’s). In the first case is a monotonously decreasing (to 0) function of , where as in the second case it is monotonously increasing (asymptoting to constant).
The first case is physically more relevant, because in most cases of interest dissipation dominates over forcing at the small scales. In this case behaves qualitatively similar as in the two examples considered in section IV. Namely, if we take the same Gaussian forcing as in these two examples, we will have which has a maximum at , smooth everywhere (including ) and rapidly decaying to zero for . However, there is a big difference from the previous examples in that now the characteristic width of function , and respectively the width of the spectrum in the variable, is of the same order as the width of the forcing function. Therefore, there is no inertial range in the final steady state considered here. This is an even stronger case of the nonlocal interaction than in the two examples considered before. Both the forcing and the dissipation parameters enter in the final answer, but not the parameters of the initial condition: the steady state beyond the weak turbulence has already forgotten all the initial data.
VI Summary.
We have shown that the three-wave interactions for the pseudo-Alfvén waves (PAW) in the 2D MHD system are non-empty and it is possible to obtain a three-wave kinetic equation within the weak turbulence approach. These interactions take place in the second order of the anisotropy parameter.
We found Kolmogorov-Zakharov power law spectra for PAW in 2D MHD system and showed that they are not realisable due to divergence of the collision integrals of the kinetic equation. In the balanced case this divergence is marginal. This is an indirect indication that the 2D PAW turbulence is nonlocal: it is dominated by interaction of waves with very different in size wavelengths. Our full analytical solution of the kinetic equation confirms such a nonlocality. It also dispels the myth that all marginally nonlocal spectra can be “fixed” by a logarithmic correction.
The crucial technique for our analysis is passing to pseudo-physical space via Fourier-transforming the kinetic equation and using a self-similar effective time variable. This has allowed us to dramatically simplify the kinetic equation, solve it analytically in some important cases and to fully analyse in the other important cases. The two main examples we analysed have a Gaussian-shaped forcing of low wavenumbers and a dissipation represented by either uniform friction or by viscosity. The first case is solvable analytically, and the second one is shown to possess a similar behaviour. Namely, the spectrum evolves independently at each and it tends to a flat steady-state spectrum in the inertial range (which is not a log-corrected Kolmogorov-Zakharov spectrum).
At each fixed , the spectrum develops sharp gradients in at small , which eventually leads to the breakdown of the weak turbulence description. We present a qualitative argument about what follows after this moment. We argue that the effect of strong turbulence is to smoothen the sharp gradients via the nonlinear resonance broadening effect. This will lead to a steady state with no gradient in for which the weak turbulence kinetic equation formally works once again, and we present an analytical solution for such a steady state.
On the practical side, one should derive from our work a warning that the 2D and the 3D MHD systems are dramatically different, and one should be careful when extrapolating the 2D results, eg. numerical ones, onto the 3D case. Indeed, in contrast to 2D, in 3D there is no gradient sharpening at small parallel wave numbers, and the Kolmogorov-Zakharov spectrum is a local and well behaved solution.
VII Acknowledgement
Sergey Nazarenko gratefully acknowledges support from the government of Russian Federation via grant No. 12.740.11.1430 for supporting research of teams working under supervision of invited scientists.
Appendix A Derivation of the wave-kinetic equation
In section II.1 we wrote the 2D MHD system in the interaction representation (13), which comprises a starting point
for derivation of the wave-kinetic equation. Let us define the wave spectrum as
where the average is taken over the random initial conditions, and is the area of the periodic box. With this normalisation tends to a finite limit as provided that the wave density is finite and uniform in the 2D physical space.
The next step consists in making use of the time scales separation. We are introducing an intermediate time scale which should be much smaller than the typical non-linear time, , and much greater than the linear wave period, . Taking will satisfy these conditions, . Then we are looking for solutions at time in the form series in small :
| (46) |
where we suppose that the lowest order amplitudes correspond to the linear regime.
For the spectrum we have:
| (47) |
After substituting expansion (46) into equation (13) in the first order we have:
| (48) |
where
| (49) |
For the second order we can write:
| (50) | |||
with
| (51) |
Next, we are going to assume that the initial amplitudes are Gaussian random variables which are statistically independent at each , and use Wick’s rule:
| (52) |
We also remember that because the physical space amplitudes are real functions we have .
We have:
and
| (54) | |||||
where we have used abbreviations , and .
Next we note that
| (55) |
and
| (56) |
Let substitute expressions (A) and (54) into the eq. (47),
| (57) |
where we have used that .
Now we take the infinite box limit, , and pass to the continuous description in the -space using the rule
where in the integrand means Dirac’s delta (recall that it is Kronecker delta in the sum).
At the next stage of the wave-kinetic procedure we need to use the weakness of the non-linearity in our system by taking the limit , which is equivalent to . For the r.h.s. of the eq. (57), we obtain:
| (58) |
Then after multiplying both parts of the eq.(57) by , its l.h.s. becomes:
| (59) |
where we took into account that time is much less than the nonlinear time at which the spectrum evolves.
After these steps we can finally write down the kinetic equation:
| (60) |
Appendix B Locality study for Kolmogorov-Zakharov solutions.
In order to explore realisability of Kolmogorov-Zakharov spectra, , we need to proceed with a convergence study of the collisional integrals:
| (61) |
Let us consider the first one, choosing at the exponent of . There are three singular points:
-
1.
,
-
2.
,
-
3.
.
At the first point, we should use the fact that the integral converges when . After substituting , we have :
Then two cases are possible:
-
•
when , the main contribution is made by:
which is convergent for ,
-
•
when the expression for the main contribution is made by:
and is convergent for .
At the second singular point, after integration out using the -function in (61), we have:
| (62) |
and we get the convergence condition . To get this condition, we have performed the series expansion: , and we have used the fact that the integral is convergent for .
To obtain the convergence condition for the last singular point, we integrate out using the -function:
| (63) | |||
The second integral is always convergent, and the first one is convergent for .
Finally, the convergence region for the first collisional integral (61) in the space of indices is:
It is represented by the grey trapezoid in Fig. 5.
To find the convergence zone for the second integral of (61) (with in the exponent of ) we just take reflection of the convergence zone for the first integral with respect to the line . Finally, to get the convergence conditions for both collisional integrals one should take the intersection of the both zones.
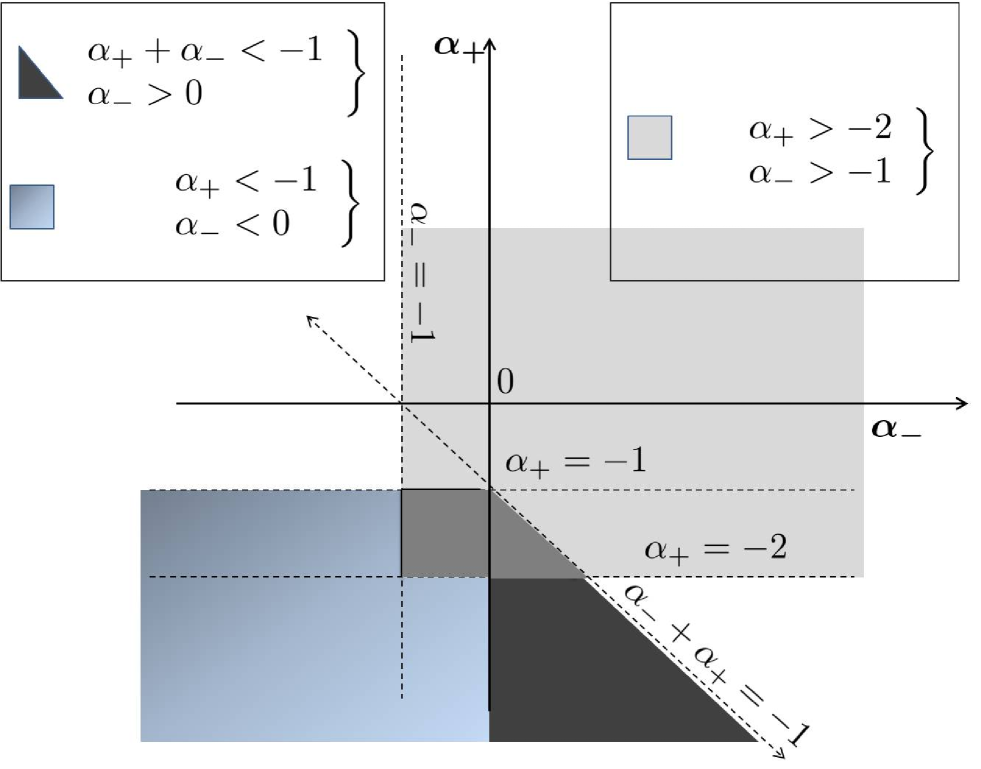
As we can see in Fig. 5 such an intersection produces a zero set. There are no power law exponents and for which both collision integrals would be convergent, and there is a single point which corresponds to marginal (logarithmic) divergence, . This point corresponds to the Kolmogorov-Zakharov spectrum in the balanced turbulence case. Common wisdom Kraichnan (1971) is that such marginally nonlocal spectra can be fixed by a logarithmic correction. However, in the main text of this paper we show that this is not the case.
References
- Marsch and Tu (1994) E. Marsch and C. Tu, Annals of Geophysics 12, 1127 (1994).
- (2) E. Priest, Solar Magnetohydrodynamics (Reidel, Dordrecht).
- Ng et al. (2003) C. Ng, A. Bhattacharjee, K. Germashewski, and S. Galtier, Physics of Plasmas 10, 1954 (2003).
- Zweibel and Heiles (1997) E. Zweibel and C. Heiles, Nature 385, 131 (1997).
- Strauss (1976) H. Strauss, Physics of Fluids 19, 134 (1976).
- Iroshnikov (1963) P. Iroshnikov, Soviet. Astron. 7, 566 (1963).
- Kraichnan (1965) R. Kraichnan, Physics of Fluids 8, 1385 (1965).
- Kolmogorov (1941) A. Kolmogorov, Dokladi Akademii Nauk 30, 229 (1941).
- Biskamp (2003) D. Biskamp, Magnetohydrodynamic turbulence (Cambridge University Press, 2003).
- Montgomery and Turner (1981) D. Montgomery and L. Turner, Physics of Fluids 24, 825 (1981).
- Shebalin et al. (1983) J. Shebalin, W. Matthaeus, and D. Montgomery, Journal of Plasma Physics 29, 525 (1983).
- Oughton et al. (1994) S. Oughton, E. Priest, and W. Matthaeus, Journal of Fluid Mechanics 280, 95 (1994).
- Ng and Bhattacharjee (1997) C. Ng and A. Bhattacharjee, Physics of Plasmas 4, 605 (1997).
- Bigot et al. (2008a) B. Bigot, S. Galtier, and H. Politano, Physical Review Letters 100, 074502 (2008a).
- Verma (2004) M. Verma, Physical Reports 401, 229 (2004).
- Chandran (2005) B. Chandran, Physical Review Letters 95, 265004 (2005).
- Boldyrev (2006) S. Boldyrev, Physical Review Letters 96, 115002 (2006).
- Bigot and Galtier (2011) B. Bigot and S. Galtier, Physical Review E 83, 026405 (2011).
- Politano et al. (1998) H. Politano, A. Pouquet, and V. Carbone, Europhysical Letters 43, 516 (1998).
- Gomez et al. (1999) T. Gomez, H. Politano, and A. Pouquet, Physics of Fluids 11, 2298 (1999).
- Biskamp and Mueller (2000) D. Biskamp and W. Mueller, Physics of Plasmas 7, 4889 (2000).
- Haugen et al. (2004) N. Haugen, A. Brandenburg, and W. Dobler, Physical Review E 70, 016308 (2004).
- Biskamp and Shwartz (2001) D. Biskamp and E. Shwartz, Physics of Plasmas 8, 3282 (2001).
- Merrifield et al. (2007) J. Merrifield, C. Chapman, and R. Dendy, Physics of Plasmas 14, 012301 (2007).
- Merrifield et al. (2006) J. Merrifield, T. Arber, C. Chapman, and R. Dendy, Physics of Plasmas 13, 012305 (2006).
- Bigot et al. (2008b) B. Bigot, S. Galtier, and H. Politano, Physical Review E 78, 066301 (2008b).
- Dritchel and Tobias (2012) D. Dritchel and S. Tobias, Journal of Fluid Mechanics 703, 85 (2012).
- Biskamp (1993) D. Biskamp, Nonlinear Magnetohydrodynamics (Cambridge University Press, 1993).
- Galtier et al. (2000) S. Galtier, S. Nazarenko, A. Newell, and A. Pouquet, Journal of Plasma Physics 63, 447 (2000).
- Achterberg (1979) A. Achterberg, Astron. Astrophys. 76, 276 (1979).
- Akhiezer et al. (1975) A. Akhiezer, I. A. Akhiezer, R. Polovin, A. Sitenko, and K. Stepanov, Plasma Electrodynamics II: Non-linear Theory and Fluctuations (Pergamon Press,Oxford, 1975).
- McIvor (1974) I. McIvor, Mon. Not. R. Astron. Soc. 178, 85 (1974).
- Zakharov (1974) V. Zakharov, Izv. Vyssh. Uchebn.Radiophyz.[Radiophys. Quantum Electron.] 17, 431 (1974).
- Zakharov (1984) V. Zakharov, Kolmogorov spectra in weak turbulence problems. In: Basic Plasma Physics II (ed. A. A. Galeev and R. Sudan) (North-Holland, Amsterdam, 1984) p. 48.
- Zakharov et al. (1992) V. Zakharov, V. L’vov, and G. Falkovich, Kolmogorov spectra of turbulence 1. Wave turbulence (Springer, Berlin (Germany), 1992).
- Kuznetsov (1972a) E. A. Kuznetsov, J. Soviet Phys. JETP 35, 310 (1972a).
- Kuznetsov (1972b) E. A. Kuznetsov, Institute of Nuclear Physics Preprint 81, 73 (1972b).
- Tsytovich (1970) V. Tsytovich, Nonlinear Effects in Plasma (Plenum Press, New York, 1970).
- Sagdeev and Galeev (1969) R. Sagdeev and A. Galeev, Nonlinear Plasma Theory (Benjamin, New York, 1969).
- Vedenov (1968) A. Vedenov, Theory of Turbulent Plasma (Iliffe Books, London/American Elsevier, New York, 1968).
- Galtier et al. (2001) S. Galtier, S. Nazarenko, and A. Newell, Nonlinear Processes in Geophysics 8, 1 (2001).
- Galtier and Nazarenko (2008) S. Galtier and S. Nazarenko, Journal of Turbulence 9, 1 (2008).
- Shridar and Goldreich (1994) S. Shridar and P. Goldreich, Astrophysical Journal 432, 612 (1994).
- Montgomery and Matthaeus (1995) D. Montgomery and W. Matthaeus, Astrophysical Journal 447, 706 (1995).
- Galtier et al. (2002) S. Galtier, S. Nazarenko, A. Newell, and A. Pouquet, Astrophysical Journal 564, L49 (2002).
- Nazarenko (2011) S. Nazarenko, Wave turbulence (Springer,Lecture notes in Physics 825, 2011).
- Abramowitz and Stegun (1965) M. Abramowitz and I. Stegun, Handbook of Mathematical Functions (Dover, New York, 1965).
- Kraichnan (1971) R. Kraichnan, Journal of Fluid Mechanics 47, 525 (1971).